Изобретение относится к аэродромному оборудованию, в частности к навесным устройствам для очистки аэродромных боковых посадочных огней взлетно-посадочной полосы (ВПП), в том числе искусственной ВПП (ИВПП), огней рулежных дорожек (РД) и магистральных рулежных дорожек (МРД) на аэродромах, подъездных путях и дорогах в целях обеспечения качественной работы осветительного оборудования аэродромов.
Известно оборудование для очистки аэродромных огней SAL 3500, содержащее раму с опорными колесами, навеску, привод, отвалы, щетки (см. http://catalog/aeromachines. Дата обращ. 15.06.2023).
Недостатками вышеперечисленного оборудования является сложность конструкции, в связи с наличием значительного количества щеток и отвалов, кроме того, при работе данного оборудования образуются снежные валы с обеих сторон створа светосигнальных огней на краю ИВПП, МРД, РД. Производство полетов запрещено до устранения обваловки, что приводит к организации дополнительных работ по ее удалению и повышенным трудозатратам. Данное оборудование предусмотрено только для очистки от снега и не предполагает очистку рабочей зоны светосигнальных огней от растительности в весенне-летний период.
Наиболее близким к заявляемому техническому решению является оборудование для очистки светосигнальных огней аэродрома, содержащее раму, навеску, привод, соединенный со щеточным механизмом, ограничитель, на раме, закрепленной при помощи навески, установлен щеточный механизм с возможностью вертикального перемещения и радиального вращения вокруг собственной оси, представляющий собой вращающийся вал, оснащенный сменной крестовиной, на которой, параллельно оси вращения вала, размещен щеточный ворс, причем волокна щеточного ворса на сменной крестовине выполнены разной длины - короче в центре и длиннее по краям, с образованием полой геометрической фигуры и возможностью изменения их положения с вертикального до наклонного и горизонтального путем изменения частоты вращения сменной крестовины и их жесткости путем их замены, при этом на раме установлен ограничитель, оснащенный защитным экраном и изогнутым желобом - прототип (см. https://yandex.ru/patents/doc/RU2795331Cl_20230502. Дата обращ. 10.07.2023 г.).
Недостатком данного технического решения является низкая производительность очистки светосигнальных огней, обусловленная продолжительным временем очистки из-за ручного управления оператором оборудованием в процессе очистки.
Техническим результатом предлагаемого устройства является повышение производительности очистки светосигнальных огней аэродрома за счет автоматизации процесса очистки.
Указанный технический результат достигается тем, что в известном оборудовании для очистки светосигнальных огней аэродрома, содержащем раму, навеску, привод, соединенный со щеточным механизмом, на раме, закрепленной при помощи навески, установлен щеточный механизм с возможностью вертикального перемещения и радиального вращения вокруг собственной оси, на сменной крестовине параллельно оси вращения размещен щеточный ворс, причем волокна щеточного ворса на сменной крестовине выполнены разной длины - короче в центре и длиннее по краям, с образованием полой геометрической фигуры и возможностью изменения их положения с вертикального до наклонного и горизонтального путем изменения частоты вращения сменной крестовины и их жесткости путем их замены, согласно изобретению, щеточный механизм представляет собой ступицу, вращающуюся вокруг оси, закрепленной неподвижно на конце рамы снизу, перпендикулярно ей, с возможностью горизонтального перемещения, привод дополнительно содержит последовательно соединенные пульт ввода и блок управления, первый, второй и третий выходы которого соединены с управляющими входами привода для горизонтального, вертикального перемещения и вращения щеточного механизма соответственно, базу данных, первый выход которой соединен со вторым входом блока управления, а второй - с первым входом блока обработки сигналов, выход которого соединен с третьим входом блока управления, датчик местоположения, установленный на торце оси щеточного механизма со стороны сменной крестовины, выход которого соединен со вторым входом блока обработки сигналов.
Сущность изобретения заключается в том, что щеточный механизм представляет собой ступицу, вращающуюся вокруг оси, закрепленной неподвижно на конце рамы снизу, перпендикулярно ей, с возможностью горизонтального перемещения, привод дополнительно содержит последовательно соединенные пульт ввода и блок управления, первый, второй и третий выходы которого соединены с управляющими входами привода для горизонтального, вертикального перемещения и вращения щеточного механизма соответственно, базу данных, первый выход которой соединен со вторым входом блока управления, а второй - с первым входом блока обработки сигналов, выход которого соединен с третьим входом блока управления, датчик местоположения, установленный на торце оси щеточного механизма со стороны сменной крестовины, выход которого соединен со вторым входом блока обработки сигналов.
В известном устройстве (см. патент RU 2795331 С1, МКП B64F 1/18(2006.01). Опубл. 02.05.2023) при очистке светосигнальных огней аэродрома оператором вручную осуществляется управление оборудованием. При этом затрачивается много времени на перемещение и точную установку и позиционирование щеточного механизма относительно очищаемого светосигнального огня (фонаря) во избежание его повреждения в процессе очистки, что приводит к снижению производительности очистки.
Согласно изобретению, повысить производительность очистки светосигнальных огней аэродрома возможно осуществить за счет автоматизации процесса очистки.
При этом для неподвижного закрепления датчика местоположения в щеточном механизме на торце оси, щеточный механизм выполняется в виде ступицы, вращающейся вокруг оси, закрепленной неподвижно на конце рамы снизу, перпендикулярно ей. С помощью пульта ввода вводят в блок управления тип (марку) очищаемых светосигнальных огней (фонарей) и время их очистки. База данных содержит информацию: по минимальным расстояниям от датчика местоположения до светосигнальных огней (фонарей) разных типов (марок), при котором осуществляется процесс их очистки; габаритным высотам разных типов (марок) светосигнальных огней (фонарей); и координатам местоположения разных типов (марок) светосигнальных огней (фонарей) относительно датчика местоположения. Датчик местоположения совместно с блоком обработки сигналов бесконтактно обнаруживает, отслеживает угловое положение и контролирует расстояния от датчика до светосигнального огня (фонаря) в вертикальной и горизонтальной плоскостях (например, по «метке», установленной по центру плафона фонаря, или по центру светового пятна, исходящего от включенного фонаря (см. https://www.c-sb.ru/company/news_articles/sovremennye-radary-printsipy-raboty-i-preimushchestva/.php.html. Дата обращ. 15.08.2023 г)), и передает эти данные в блок управления. В блоке управления анализируется информация, поступающая с пульта вода, базы данных и блока обработки сигналов. Если координаты местоположения фонаря относительно датчика местоположения не соответствуют заданным, то блок управления подает команду на поочередное включение (отключение) приводов горизонтального и вертикального перемещений щеточного механизма до того момента, пока ось щеточного механизма не расположится соосно с осью симметрии очищаемого светосигнального огня (фонаря) и на заданной минимальной высоте от плафона фонаря. После этого блок управления подает команду на включение привода вращения ступицы щеточного механизма на заданное время и затем подает команду на его выключение. В результате процесс очистки светосигнальных огней (фонарей) происходит автоматизировано при минимуме труда оператора, что приводит к повышению производительности очистки. Этим достигается указанный в изобретении технический результат.
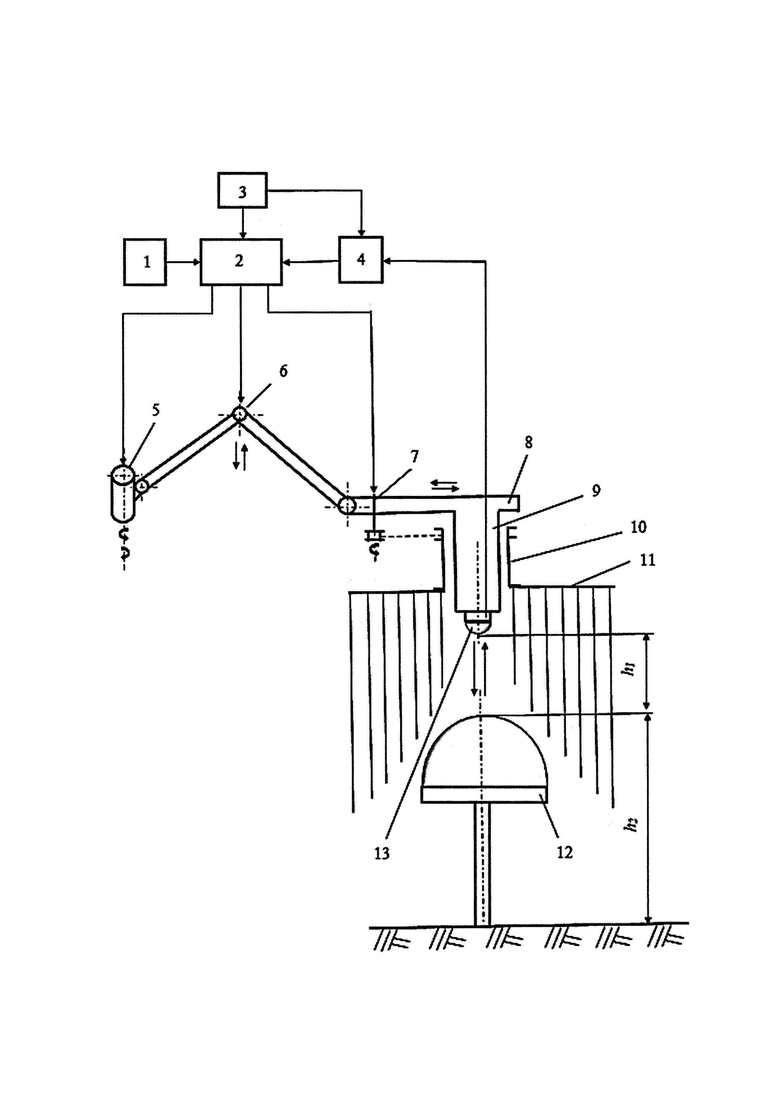
Структурная схема оборудования для очистки светосигнальных огней аэродрома представлена на фигуре, где показаны: 1 - пульт ввода; 2 - блок управления; 3 - база данных; 4 - блок обработки сигналов; 5 - привод горизонтального перемещения щеточного механизма; 6 - привод вертикального перемещения щеточного механизма; 7 - привод вращения щеточного механизма; 8 - рама; 9 - ось; 10 - ступица; 11 - крестовина щетки; 12 - светосигнальный огонь (фонарь); 13 - датчик местоположения; h1 -минимальное расстояние от датчика местоположения до светосигнального огня (фонаря), при котором осуществляется процесс его очистки; h2 - габаритная высота светосигнального огня (фонаря) в зависимости от его типа (марки).
С помощью пульта ввода 1 задают тип (марку) очищаемых светосигнальных огней (фонарей) 12 и время их очистки.
Блок управления 2 предназначен для анализа информации, поступающей с пульта вода 1, базы данных 2 и блока обработки сигналов 4, и подачи команд на включение (отключение) приводов горизонтального 5 и вертикального 6 перемещений и вращения 7 щеточного механизма.
База данных 3 предназначена для хранения информации: по минимальным расстояниям h1 от датчика местоположения 13 до светосигнальных огней (фонарей) 12 разных типов (марок), при котором осуществляется процесс их очистки; габаритным высотам h2 разных типов (марок) светосигнальных огней (фонарей) 12; и координатам местоположения разных типов (марок) светосигнальных огней (фонарей) 12 относительно датчика местоположения 13.
Блок обработки сигналов 4 предназначен для обработки сигналов, поступающих с датчика местоположения 13, с использованием интеллектуальных алгоритмов измеряет время, необходимое для того, чтобы сигнал отразился от фонаря 12, анализирует временную задержку и частотный сдвиг отраженного сигнала и интерпретирует сигналы, содержащие информацию об обнаруженном фонаре для его идентификации и позиционирования с использованием собранных данных, включая расстояния в вертикальной и горизонтальной плоскостях, и угловое положение фонаря относительно датчика местоположения 13.
Пульт ввода 1, блок управления 2, база данных 3 и блок обработки сигналов 4 могут быть выполнены на микроконтроллерах семейства pic (см., например, http://elwo.ru/publ/skhemy_na_mikrokontrollerakh/mikrokontrollery_pic/9-1-0-251. Дата обращ. 16.08.2023 г.).
Датчик местоположения 13 предназначен для излучения сигнала и передачи его в блок обработки сигналов 4. В качестве такого датчика может быть использован, например, радарный датчик T30R-1515-KDQ (см., например, https://sensor365.ru/datchiki-polozheniya/radarnye-datchiki-dvizheniya/. Дата обращ. 17.08.2023 г.).
Оборудование для очистки светосигнальных огней аэродрома работает следующим образом. Оборудование навешивают на транспортное средство как навесное. Вводят с помощью пульта ввода 1 в блок управления 2 тип (марку) очищаемых светосигнальных огней (фонарей) 12. База данных 3 содержит информацию: по минимальным расстояниям h1 от датчика местоположения 13 до светосигнальных огней (фонарей) 12 разных типов (марок), при котором осуществляется процесс их очистки; габаритным высотам h2 разных типов (марок) светосигнальных огней (фонарей) 12; и координатам местоположения разных типов (марок) светосигнальных огней (фонарей) 12 относительно датчика местоположения 13. Включают блок управления 2, например, с помощью тумблера (не показан). Датчик местоположения 13, излучает сигнал и передает отраженный сигнал в блок обработки сигналов 4, в котором анализируется временная задержка и частотный сдвиг отраженного сигнала и определяются координаты фонаря 12 через его угловое положение и расстояния от него до датчика местоположения 13 в вертикальной и горизонтальной плоскостях. Полученные координаты сравниваются с заданными, находящимися в базе данных 3 и передаются в блок управления 2. В блоке управления 2 анализируется информация, поступающая с пульта вода 1, базы данных 3 и блока обработки сигналов 4. Если координаты местоположения фонаря 12 относительно датчика местоположения 13 не соответствуют заданным в базе данных 3, то блок управления 2 подает команду на поочередное включение (отключение) приводов горизонтального 5 и вертикального 6 перемещений щеточного механизма до того момента, пока ось 9 щеточного механизма не расположится соосно с осью симметрии очищаемого светосигнального огня (фонаря) 12 и на заданной минимальной высоте h1 от плафона фонаря 12 с учетом его габаритной высоты h2. После этого блок управления 2 подает команду на включение привода вращения ступицы 10 щеточного механизма и начинается процесс очистки светосигнального огня (фонаря) 12. По окончании заданного в пульте ввода 1 времени очистки блок управления 2 подает команду на выключение привода вращения 7 ступицы 10 щеточного механизма. После этого оператор перемещает транспортное средство к следующему светосигнальному огню и весь процесс повторяется. В результате процесс очистки светосигнальных огней (фонарей) происходит автоматизировано при минимуме труда оператора, что приводит к повышению производительности очистки.
Предлагаемое техническое решение практически применимо, так как для его реализации могут быть использованы типовые устройства и электронные узлы.
Предлагаемое техническое решение позволяет круглогодично в независимости от погодных условий, в сильную жару и холод, в условиях плохого освещения обеспечивать высокопроизводительную очистку светосигнальных огней аэродрома от снежно-ледяных образований без образования снежных валов в холодное время года и удаление растительности в теплое время года.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОБОРУДОВАНИЕ ДЛЯ ОЧИСТКИ СВЕТОСИГНАЛЬНЫХ ОГНЕЙ АЭРОДРОМА | 2022 |
|
RU2795331C1 |
| ОБОРУДОВАНИЕ ДЛЯ ОЧИСТКИ СВЕТОСИГНАЛЬНЫХ ОГНЕЙ АЭРОДРОМА | 2023 |
|
RU2814929C1 |
| САМОЛЕТ С СИСТЕМОЙ УПРАВЛЕНИЯ ОБЩЕСАМОЛЕТНЫМ ОБОРУДОВАНИЕМ | 2004 |
|
RU2263044C1 |
| КОЛЕСО ОБОЗРЕНИЯ И ЕГО УЗЛЫ | 2001 |
|
RU2207895C1 |
| ЛЕГКИЙ СВЕРХЗВУКОВОЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ | 2004 |
|
RU2271305C1 |
| Устройство измерения коэффициента сцепления колес воздушных судов с покрытием взлетно-посадочных полос | 2016 |
|
RU2647336C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СИСТЕМОЙ ОГНЕЙ ВЫСОКОЙ ИНТЕНСИВНОСТИ | 1992 |
|
RU2065621C1 |
| Устройство для управления системой огней высокой интенсивности | 1990 |
|
SU1805486A1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ КОЭФФИЦИЕНТА СЦЕПЛЕНИЯ КОЛЕСА С ПОВЕРХНОСТЬЮ АЭРОДРОМНЫХ И ДОРОЖНЫХ ПОКРЫТИЙ | 2008 |
|
RU2369856C1 |
| АВТОМАТИЗИРОВАННЫЙ КОРАБЕЛЬНЫЙ КОМПЛЕКС СВЕТОСИГНАЛЬНОЙ СВЯЗИ | 2016 |
|
RU2638057C2 |
Изобретение относится к аэродромному оборудованию. Оборудование для очистки светосигнальных огней аэродрома содержит щеточный механизм. Щеточный механизм представляет собой ступицу (11), вращающуюся вокруг оси (9), закрепленной неподвижно на конце рамы (8) снизу, перпендикулярно ей, с возможностью горизонтального перемещения. Привод содержит последовательно соединенные пульт ввода (1) и блок управления (2). Выходы блока управления соединены с управляющими входами привода щеточного механизма. Первый выход базы данных (3) соединен со вторым входом блока управления, а второй - с первым входом блока обработки сигналов, выход которого соединен с третьим входом блока управления. Датчик (13) местоположения установлен на торце оси (9) щеточного механизма со стороны сменной крестовины (11), выход которого соединен со вторым входом блока обработки сигналов. Достигается повышение производительности очистки светосигнальных огней аэродрома. 1 ил.
Оборудование для очистки светосигнальных огней аэродрома, содержащее раму, навеску, привод, соединенный со щеточным механизмом, на раме, закрепленной при помощи навески, установлен щеточный механизм с возможностью вертикального перемещения и радиального вращения вокруг собственной оси, на сменной крестовине параллельно оси вращения размещен щеточный ворс, причем волокна щеточного ворса на сменной крестовине выполнены разной длины - короче в центре и длиннее по краям, с образованием полой геометрической фигуры и возможностью изменения их положения с вертикального до наклонного и горизонтального путем изменения частоты вращения сменной крестовины и их жесткости путем их замены, отличающееся тем, что щеточный механизм представляет собой ступицу, вращающуюся вокруг оси, закрепленной неподвижно на конце рамы снизу, перпендикулярно ей, с возможностью горизонтального перемещения, привод дополнительно содержит последовательно соединенные пульт ввода и блок управления, первый, второй и третий выходы которого соединены с управляющими входами привода для горизонтального, вертикального перемещения и вращения щеточного механизма соответственно, базу данных, первый выход которой соединен со вторым входом блока управления, а второй - с первым входом блока обработки сигналов, выход которого соединен с третьим входом блока управления, датчик местоположения, установленный на торце оси щеточного механизма со стороны сменной крестовины, выход которого соединен со вторым входом блока обработки сигналов.
| ОБОРУДОВАНИЕ ДЛЯ ОЧИСТКИ СВЕТОСИГНАЛЬНЫХ ОГНЕЙ АЭРОДРОМА | 2022 |
|
RU2795331C1 |
| Способ и устройство для изготовления литых шлаковых камней | 1937 |
|
SU59641A1 |
| US 20070277334 A1, 06.12.2007 | |||
| JP 2002138431 A, 14.05.2002 | |||
| Способ восстановления спиралей из вольфрамовой проволоки для электрических ламп накаливания, наполненных газом | 1924 |
|
SU2020A1 |
