Изобретение относится к радиотехнике и может быть использовано при разработке систем радиозондирования атмосферы (CP), построенных на основе применения радиолокационного метода измерения пространственных координат аэрологического радиозонда (АРЗ) и использования сигналов спутниковых навигационных радиоэлектронных систем (СНРС) ГЛОНАСС/GPS для определения текущих координат аэрологического радиозонда (РЗ), направления и скорости ветра, а также передачи координатной и телеметрической информации на наземную базовую станцию (БС).
Общей проблемой производства и эксплуатации CP атмосферы является создание высокоточных систем определения координат АРЗ, недорогих конструкций аэрологических радиозондов, обеспечивающих измерение метеорологических параметров атмосферы с необходимой точностью, надежную передачу информации с борта АРЗ на наземную станцию в оперативном радиусе действия СР.
Известен удаленный GPS-датчик и обрабатывающая система для удаленного GPS-зондирования и централизованная обработка на наземной станции для удаленного мобильного определения местоположения и скорости (патент США №5420592). Пример осуществления данного изобретения - система радиозондирования, включающая в себя цифровой буфер сигналов GPS и последовательный коммуникационный контроллер для передачи кадров сообщений, формируемых комбинацией цифровых данных из буфера снимка сигналов GPS и оцифрованных метеорологических данных, полученных устройством измерения влажности, температуры и давления. Кадры сообщения передаются со сравнительно низкой скоростью по метеорологическому радиоканалу на наземную станцию. Вся традиционная цифровая обработка GPS-сигналов главным образом выполняется на наземной станции, включая восстановление несущей частоты, захват псевдослучайно-шумового кода, выделение псевдодальностей, выделение эфемеридной информации, сбор альманаха, выбор спутников, вычисление навигационного решения и дифференциальные поправки. Кроме того, наземная обработка включает в себя фильтрацию Калмана вычисления скорости ветра.
Недостатки известного решения: большая загруженность радиоканала телеметрии, поэтому более широкий спектр передаваемого сигнала (потери в дальности или увеличение мощности передатчика радиозонда); прерывистость обработки сигналов GPS, что усложняет функционирование следящих контуров и фильтров.
Известна система GPS-слежения (патент США №5379224). Недорогая система слежения, использующая спутники Глобальной системы позиционирования (GPS), пригодна для применения в прикладных задачах, в которых задействованы радиозонды, радиогидроакустические буйки и другие подвижные объекты. Система слежения включает в себя датчик, установленный на каждом объекте, который в оцифровывает сигналы GPS-спутников и записывает их в буфер данных. Затем эти цифровые выборки передаются с меньшей скоростью, чем эти сигналы GPS-спутников были оцифрованы, по телеметрическому каналу связи, чередуясь с другими телеметрическими данными объекта. Эти данные GPS обрабатываются вычислительной рабочей станцией, которая вычисляет координаты и скорость датчика на момент выборки (оцифровки) сигнала. Буфер данных датчика периодически обновляется, а на рабочей станции периодически пересчитываются координаты и скорость датчика. Кроме этого рабочая станция вычисляет дифференциальные поправки, чтобы помочь обнаружить сигналы и повысить точности определения координат.
Недостатки известного решения: большая загруженность радиоканала телеметрии, поэтому более широкий спектр передаваемого сигнала (потери в дальности или увеличение мощности передатчика); прерывистость обработки сигналов GPS, что усложняет функционирование следящих контуров и фильтров.
Известна система радиозондирования атмосферы (патент РФ на полезную модель №106758) «Система радиозондирования атмосферы на основе сигналов GPS/ГЛОНАСС». Система содержит передатчики навигационных сигналов системы GPS, передатчики навигационных сигналов системы ГЛОНАСС, аэрологический радиозонд (АРЗ), снабженный приемником навигационных сигналов систем GPS и ГЛОНАСС, первую, вторую и третью антенные системы, наземную базовую станцию с блоком отображения координатно-телеметрической информации. Первая антенная система метеорологической системы обеспечивает дифференциальный режим работы. Вторая антенная система имеет круговую диаграмму направленности в азимутальной плоскости, широкую диаграмму направленности в угломестной плоскости и обеспечивает прием сигналов АРЗ на частоте 403 мГц в ближней зоне. Третья антенная система имеет круговую диаграмму направленности в азимутальной плоскости, узкую диаграмму направленности в угломестной плоскости и обеспечивает прием сигналов АРЗ на частоте 403 мГц в дальней зоне.
Недостатком известной системы является низкая пространственная селекция сигнала радиозонда, недостаточная ЭМС, низкая помехозащищенность от преднамеренных помех по каналам приема навигационных сигналов и сигналов радиозонда.
Известна система радиозондирования атмосферы (патент РФ на полезную модель №109297) «Система радиозондирования атмосферы GPS/ГЛОНАСС». Система радиозондирования атмосферы работает на основе сигналов спутниковых навигационных систем ГЛОНАСС, GPS, GALILEO. Наземная базовая станция системы радиозондирования принимает сигналы навигационного радиозонда в диапазоне 403±10МГц в ближней зоне на антенну с круговой диаграммой направленности. В дальней зоне прием осуществляется на антенну, обладающую направленными свойствами в диапазоне 403±10 МГц.
Недостатком является невозможность создания в диапазоне 403±10 МГц антенной системы с узкой диаграммой направленности с целью повышения пространственной селекции и повышения потенциала СР.
Известна система радиозондирования атмосферы радиолокационного типа АВК-МРЗ, работающая в диапазоне 1780 мГц (см. 1) Ермаков В.И., Кузенков А.Ф., Юрманов В.А. Системы зондирования атмосферы. Л.: Гидрометиздат, 1977. 304 с.; 2) Ефимов А.А. Принципы работы аэрологического информационно-вычислительного комплекса АВК - 1. М.: Гидрометеоиздат,1989. 149 с.; 3) Зайцева Н.А. Аэрология. Гидрометеоиздат, 1990. 325 с.). Радиозонд типа МРЗ-3 снабжен сверхрегенеративным приемопередатчиком, который совместно с наземной РЛС АВК-1 обеспечивает измерение угловых координат, наклонной дальности по запросному радиоимпульсу и передачу на РЛС метеорологической информации. Достоинством CP АВК-МРЗ является полная автономность работы, достаточно высокая точность измерения метеорологических параметров в оперативном радиусе работы до 250 км. РЛС содержит антенную систему с узкой диаграммой направленности шириной около 6 градусов и высоким коэффициентом усиления. При установке на радиозонд МРЗ-3 датчика давления CP может работать в радиопеленгационном режиме без излучения запросных радиоимпульсов.
Недостатком известной CP является возможный срыв автосопровождения радиозонда по угловым координатам из-за узкой диаграммы направленности при сильном боковом ветре в момент запуска и принципиальное снижение точности определения высоты подъема радиозонда из-за ограниченной точности измерения угловых координат при значительных удалениях радиозонда.
Известна комплексная система радиозондирования атмосферы (патент РФ на полезную модель №127944). Комплексная система радиозондирования атмосферы работает на основе сигналов спутниковых навигационных систем ГЛОНАСС, GPS, GALILEO. Аэрологический радиозонд содержит навигационный приемник сигналов ГЛОНАСС, GPS, GALILEO. Наземная базовая станция системы радиозондирования принимает сигналы навигационного радиозонда в диапазоне 1670-1690 МГц на антенну, обладающую высокими направленными свойствами.
Недостатком полезной модели является работа только в одном диапазоне 1670-1690 МГц и невозможность использования второго разрешенного диапазона 403 мГц. Другим недостатком следует считать возможные срывы автосопровождения радиозонда по угловым координатам из-за узкой диаграммы направленности при запуске радиозонда и в ближней зоне. Эта CP выбрана в качестве ПРОТОТИПА.
Недостатками известных технических решений и ПРОТОТИПА является невозможность создать антенную систему (АС) с узкой ДН в диапазоне 403±10 МГц и обеспечить высокую устойчивость приема и точность получения метеорологической информации радиолокационных CP работающих в диапазоне 1670-1690 МГц, а также обеспечить автономный режим работы CP при подавлении сигналов СНРС ГЛОННАС/GPS.
Технической задачей изобретения является обеспечение автономного режима работы CP, повышение надежности и точности получения метеорологической информации о вертикальном профиле состояния атмосферы в оперативном радиусе действия CP при возможном воздействии преднамеренных и непреднамеренных помех.
Технический результат достигается за счет развития структуры построения CP, а именно за счет обеспечения возможности оперативной работы CP в двух разрешенных диапазонах частот и различных режимах определения текущих координат АРЗ: радиолокационном, радиопеленгационном, радионавигационном.
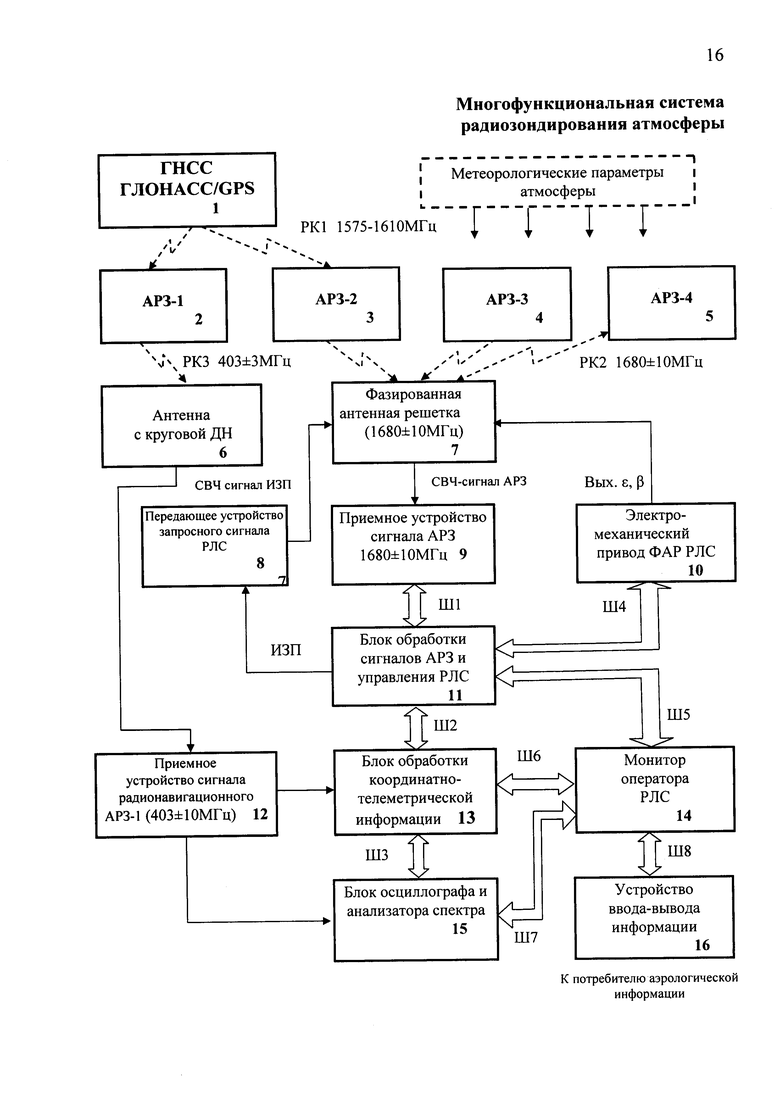
Для решения этой задачи предлагается многофункциональная система радиозондирования атмосферы, содержащая, радиопеленгационный АРЗ 3, радиолокационный АРЗ 4 и наземную РЛС в составе: фазированная антенная решетка (ФАР) РЛС работающая на частоте f1=1680±10 МГц, электромеханический привод ФАР РЛС, передающее устройство запросного сигнала РЛС, приемное устройство сигнала АРЗ, блок обработки сигналов АРЗ и управления РЛС, блок обработки координатно-телеметрической информации, монитор оператора РЛС, устройство ввода-вывода информации, отличающаяся тем, что в нее введены ГНСС ГЛОНАСС/GPS, радионавигационный АРЗ 1, радионавигационный АРЗ 2, а в наземную РЛС введены следующие блоки: антенна с круговой диаграммой направленности, приемное устройство радионавигационного сигнала АРЗ 1 на частоту f2=403±10 МГц, блок осциллографа и анализатора спектра со следующими соединениями, а также соединениями всей системы в целом: сигналы ГЛОНАСС/GPS первым радиоканалом соединены с первым АРЗ 1 и вторым АРЗ 2, выход первого АРЗ 1 третьим радиоканалом через антенну с круговой диаграммой направленности соединен с приемным устройством радионавигационного сигнала АРЗ-1, выходы которого соединены с блоками обработки координатно-телеметрической информации и с блоком осциллографа и анализатора спектра; выходы второго, третьего и четвертого АРЗ вторым радиоканалом соединены с ФАР РЛС, выход СВЧ-сигнала которой через приемное устройство, работающее на частоте f=1680±10 МГц двунаправленной шиной связи Ш1, соединен с блоком обработки сигналов АРЗ и управления РЛС, выход которого второй двунаправленной шиной связи Ш2 соединен с блоком обработки координатно-телеметрической информации, а выходы этого блока третьей двунаправленной шиной связи Ш3 соединен с блоком осциллографа и анализатора спектра, а шестой двунаправленной шиной связи Ш6 с монитором оператора РЛС, который в свою очередь седьмой двунаправленной шиной связи Ш7 соединен с блоком осциллографа и анализатора спектра, восьмой двунаправленной шиной связи Ш8 с устройством ввода/вывода информации, пятой двунаправленной шиной связи Ш5 с блоком обработки сигналов АРЗ и управления РЛС, выход которого четвертой двунаправленной шиной связи Ш4 соединен с электромеханическим приводом ФАР РЛС, а его выход сигналами ε и β соединен с входом управления ФАР РЛС по углу места и азимута; блок обработки сигналов АРЗ и управления РЛС через передающее устройство РЛС соединен с СВЧ входом ФАР РЛС.
На чертеже показана структурная схема системы, на которой изображено: (1) - системы спутниковых навигационных сигналов ГЛОНАСС и GPS соответственно, (2) - навигационный АРЗ 1, (3) - навигационный АРЗ 2, (4) - радиопеленгационный АРЗ 3, (5) - радиолокационный АРЗ 4, (6) -антенна с круговой диаграммой направленности работающая в диапазоне частот 403±10 МГц, (7) - фазированная антенная решетка (ФАР) РЛС, работающая в диапазоне частот 403±10 МГц, (8) - передающее устройство запросного сигнала РЛС, работающее в диапазоне частот 403±10 МГц, (9) - приемное устройство сигналов АРЗ работающее в диапазоне частот 403±10 МГц, (10) - электромеханический привод ФАР РЛС, (11) - блок обработки сигналов АРЗ и управления РЛС, (12) - приемное устройство радионавигационного сигнала АРЗ 1, (13) - блок обработки координатно-телеметрической информации, (14) - монитор оператора РЛС, (15) - блок осциллографа и анализатора спектра, (16) - устройство ввода-вывода информации, РК1 - первый радиоканал (рабочий диапазон частот 1575-1610 МГц), РК2 - второй радиоканал (рабочий диапазон частот 1680±10 МГц), РК3 - третий радиоканал (рабочий диапазон частот 403±10 МГц).
Многофункциональная система радиозондирования атмосферы имеет следующие соединения.
Сигналы ГЛОНАСС/GPS первым радиоканалом соединены с первым АРЗ 1 (2) и вторым АРЗ 2 (3), выход первого АРЗ 1 (2) третьим радиоканалом через антенну с круговой диаграммой направленности (6) соединен с приемным устройством радионавигационного сигнала первого АРЗ 1(2) (12), работающим в диапазоне частот f=1680±10 МГц, выходы которого соединены с блоками обработки координатно-телеметрической информации (13) и с блоком осциллографа и анализатора спектра (15), выходы второго АРЗ 2 (3), третьего АРЗ 3 (4) и четвертого АРЗ 4 (5) вторым радиоканалом соединены с ФАР РЛС (7), выход СВЧ-сигнала которой через приемное устройство (9), работающее в диапазоне частот f=1680±10 МГц, первой двунаправленной шиной связи Ш1 соединен с блоком обработки сигналов АРЗ и управления РЛС (11), выход которого второй двунаправленной шиной связи Ш2 соединен с блоком обработки координатно-телеметрической информации (13), а выходы этого блока третьей двунаправленной шиной связи Ш3 соединен с блоком осциллографа и анализатора спектра (15), а шестой двунаправленной шиной связи Ш6 с монитором оператора РЛС (14), который в свою очередь седьмой двунаправленной шиной связи Ш7 соединен с блоком осциллографа и анализатора спектра (15), восьмой двунаправленной шиной связи Ш8 с устройством ввода/вывода информации (16), пятой двунаправленной шиной связи Ш5 с блоком обработки сигналов АРЗ и управления РЛС (11), выход которого четвертой двунаправленной шиной связи Ш4 соединен с электромеханическим приводом ФАР РЛС (10), а его выход сигналами ε и β соединен с входом управлением ФАР РЛС (7) по углу места и азимута; блок обработки сигналов АРЗ и управления РЛС (11) через передающее устройство РЛС (8) соединен с СВЧ входом ФАР РЛС (7).
Многофункциональная система радиозондирования атмосферы может работать в четырех режимах следующим образом.
В первом режиме работы РЛС осуществляет зондирование атмосферы при работе с штатными радиолокационными радиозондами АРЗ 4 (5) типа МРЗ-3. Координаты АРЗ определяется путем измерения угловых координат и измерения наклонной дальности с помощью передающего устройства запросного сигнала (8). В радиолокационном режиме обеспечивается дальность действия CP не менее 250 км. Штатная РЛС состоит из блоков (7), (8), (9), (10), (11), (13), (14), (16). Передатчик АРЗ 4 (5) передает пакетную информацию по радиоканалу РК2 1670-1690 МГц. Блок обработки координатно-телеметрической информации (13) осуществляет расшифровку принятых информационных пакетов АРЗ 4 (5) и выдает информацию в блоки управления (11) и наблюдения (14), (15).
Во втором радиопеленгационном режиме РЛС осуществляет зондирование атмосферы при работе с штатными радиопеленгационными радиозондами АРЗ З (4) типа МРЗ-3, с снабженными дополнительно датчиками давления для измерения высоты подъема радиозонда. Штатная РЛС состоит из блоков (7), (8), (9), (10), (11), (13), (14), (16). Передатчик АРЗ (4) передает пакетную информацию по радиоканалу РК2 1670-1690 МГц. Блок обработки координатно-телеметрической информации (13) осуществляет расшифровку принятых информационных пакетов АРЗ 3 (4) и выдает информацию в блоки управления (11) и наблюдения (14), (15).
Подробно работа радиолокационной CP описана в известной литературе (см. Ермаков В.И., Кузенков А.Ф., Юрманов В.А. Системы зондирования атмосферы. Л.: Гидрометиздат, 1977. 304 с.; Ефимов А.А. Принципы работы аэрологического информационно - вычислительного комплекса АВК - 1. М.: Гидрометеоиздат, 1989. 149 с.; Зайцева Н.А. Аэрология. Гидрометеоиздат, 1990. 325 с.).
Третий режим CP предусматривает работу РЛС с навигационным радиозондом АРЗ 2 (3). Штатная радиолокационная станция РЛС состоит из блоков (7), (8), (9), (10), (11), (13), (14), (16). Однако она работает во взаимодействии с навигационным радиозондом АРЗ 2 (3), при этом снабженным приемником навигационных сигналов СНРС ГЛОНАСС/GPS (1). АРЗ 2 (3) передает на РЛС измеренные координаты своего положения в пространстве и метеорологические параметры атмосферы. РЛС работает только в режиме приема сигналов навигационного АРЗ 2 (3). Косвенно в системе задействованы спутниковые радионавигационные системы СНРС ГЛОНАСС/GPS (1) и потребитель аэрологической информации. Навигационный аэрологический радиозонд АРЗ 2 (3) снабжен передатчиком, работающим на частоте радиоканала РК 1670-1690 МГц. Блок обработки координатно-телеметрической информации (13) осуществляет расшифровку принятых информационных пакетов АРЗ 2 (3) и выдает информацию в блоки управления (11) и наблюдения (14), (15).
В четвертом режиме CP работает по сигналам навигационного АРЗ 1 (2), осуществляющего прием навигационных сигналов спутниковых радионавигационных систем ГЛОНАСС/GPS, поступающих по радиоканалу РК1 1575-1610 МГц в антенну с круговой диаграммой направленности (6). Из полученной навигационной информации и измеренных значений метеорологических параметров АРЗ 1 (2) (3) формирует информационный координатно-телеметрический сигнал и передает его на РЛС по радиоканалу РКЗ 403±10 МГц. Координатно-телеметрическая информация в пакетном режиме принимается на антенну с круговой диаграммой направленности (6), приемным устройством сигнала радионавигационного АРЗ 1 (2) и далее подается для наблюдения в блок осциллографа и анализатора спектра (15), а также в блок обработки координатно-телеметрической информации (13), в котором осуществляется расшифровка принятых информационных пакетов АРЗ 2 (3).
Блок осциллографа и анализатора спектра (15) используется во всех режимах работы СР. Он обеспечивает наблюдение временных и спектральных параметров принимаемых сигналов радиозондов, существенно облегчает работу оператора РЛС при сопровождении АРЗ в полете.
Блок обработки сигналов АРЗ и управления РЛС (11) вырабатывает сигналы управления, которые поступают на электромеханический привод ФАР РЛС (10) и обеспечивают автоматическое сопровождение радиозонда по угловым координатам - азимутальной (β) и угломестной (ε) плоскостям.
Блок обработки координатно-телеметрической информации (13) результаты обработки аэрологических данных через монитор оператора РЛС (14) передает в устройство ввода-вывода информации (16) и далее в принятом формате потребителю аэрологической информации.
Таким образом, предложенная многофункциональная система радиозондирования работает в двух частотных диапазонах и различных режимах работы:
1. CP работает в штатном радиолокационном режиме с серийными АРЗ снабженными радиолокационными сверхрегенеративными ответчиками в диапазоне 1680±10МГц;
2. CP работает в штатном радиопеленгационном режиме с серийными АРЗ снабженными датчиками давления в диапазоне 1680±10МГц;
3. CP работает в радионавигационном режиме с АРЗ в диапазоне 1680±10МГц;
4. CP работает в радионавигационном режиме с АРЗ в диапазоне 403±10МГц;
5. Автосопровождение сигнала АРЗ осуществляется в радиопеленгационном и радионавигационном режимах РЛС без излучения запросного сигнала.
6. Для повышения скрытности работы CP мощность излучения передатчика радионавигационного АРЗ 2 (3) в диапазоне 1680±10МГц может быть снижена в принципе на 15-20 дБ (вплоть до 1-10 мВт) за счет усиления остронаправленной антенны (25 дБ) РЛС и узкополосного сигнала передатчика АРЗ 2 (3).
Таким образом, предложенная многофункциональная система радиозондирования позволяет существенно повысить тактико-технические и эксплуатационные характеристики отечественных CP: надежность и точность определения метеорологических параметров атмосферы, пространственных координат радиозонда, направления и скорости ветра, помехоустойчивость, ЭМС, обеспечить надежную передачу информации с борта АРЗ на наземную станцию в оперативном радиусе действия CP при постановке преднамеренных помех и помех, создаваемых другими радиосистемами.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАВИГАЦИОННО-РАДИОЛОКАЦИОННАЯ СИСТЕМА РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2022 |
|
RU2805163C1 |
| РАДИОЛОКАЦИОННО-НАВИГАЦИОННАЯ СИСТЕМА РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2022 |
|
RU2793597C1 |
| МНОГОРЕЖИМНЫЙ АЭРОЛОГИЧЕСКИЙ КОМПЛЕКС | 2019 |
|
RU2710965C1 |
| УНИФИЦИРОВАННАЯ СИСТЕМА РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2014 |
|
RU2576023C1 |
| МАЛОГАБАРИТНАЯ НАВИГАЦИОННАЯ СИСТЕМА РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2016 |
|
RU2613342C1 |
| НАВИГАЦИОННАЯ СИСТЕМА ЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2015 |
|
RU2613153C1 |
| НАВИГАЦИОННЫЙ АЭРОЛОГИЧЕСКИЙ РАДИОЗОНД С ПЕРЕДАТЧИКОМ НА ПАВ-РЕЗОНАТОРЕ | 2022 |
|
RU2785585C1 |
| МЕТЕОРОЛОГИЧЕСКАЯ СИСТЕМА | 2011 |
|
RU2480791C2 |
| НАВИГАЦИОННЫЙ АЭРОЛОГИЧЕСКИЙ РАДИОЗОНД | 2022 |
|
RU2820052C2 |
| СИСТЕМА РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ С ПАКЕТНОЙ ПЕРЕДАЧЕЙ МЕТЕОРОЛОГИЧЕСКОЙ ИНФОРМАЦИИ | 2013 |
|
RU2529177C1 |
Изобретение относится к радиотехнике и может быть использовано при разработке систем радиозондирования атмосферы (CP) построенных на основе применения радиолокационного метода измерения пространственных координат аэрологического радиозонда (АРЗ) и использования сигналов спутниковых навигационных радиоэлектронных систем (СНРС) ГЛОНАСС/GPS для определения текущих координат аэрологического радиозонда (РЗ), направления и скорости ветра, а также передачи координатной и телеметрической информации на наземную базовую станцию (БС). Достигаемый технической результат изобретения - повышение надежности и точности получения метеорологической информации о вертикальном профиле состояния атмосферы в оперативном радиусе действия CP при возможном воздействии преднамеренных и непреднамеренных помех. Указанный технический результат достигается за счет развития структуры построения CP, а именно за счет обеспечения возможности оперативной работы CP в двух разрешенных диапазонах частот и различных режимах определения текущих координат АРЗ: радиолокационном, радиопеленгационном, радионавигационном. 1 ил.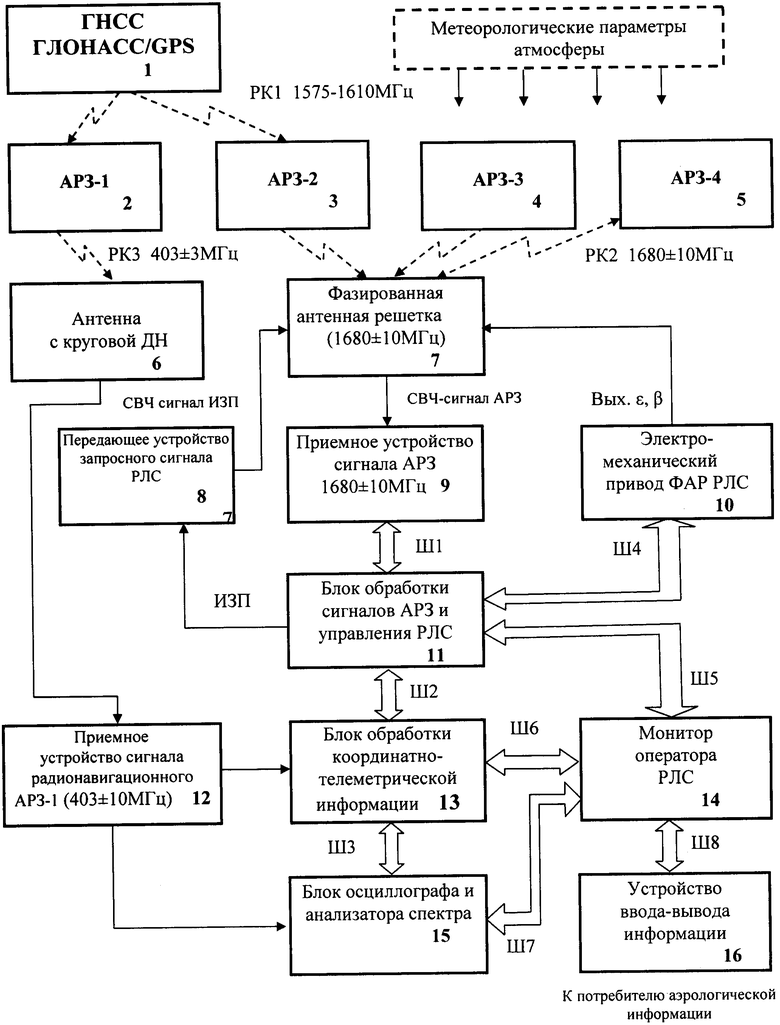
Многофункциональная система радиозондирования атмосферы, содержащая радиопеленгационный третий аэрологический радиозонд (АРЗ), радиолокационный четвертый АРЗ и наземную радиолокационную станцию (РЛС) в составе: фазированная антенная решетка - ФАР РЛС, работающая в диапазоне частот f1=1680±10 МГц, электромеханический привод ФАР РЛС, передающее устройство запросного сигнала РЛС, приемное устройство сигналов третьего и четвертого АРЗ, блок обработки сигналов этих АРЗ и управления РЛС, блок обработки координатно-телеметрической информации, монитор оператора РЛС, устройство ввода-вывода информации, отличающаяся тем, что в нее введены глобальная спутниковая навигационная система (ГНСС) ГЛОНАСС/GPS, радионавигационный первый АРЗ, радионавигационный второй АРЗ, а в наземную РЛС введены следующие блоки: антенна с круговой диаграммой направленности, приемное устройство радионавигационного сигнала первого АРЗ, работающее в диапазоне частот f2=403±10 МГц, блок осциллографа и анализатора спектра со следующими соединениями, а также соединениями всей системы в целом: сигналы ГЛОНАСС/GPS первым радиоканалом соединены с первым АРЗ и вторым АРЗ, выход первого АРЗ третьим радиоканалом через антенну с круговой диаграммой направленности соединен с приемным устройством радионавигационного сигнала первого АРЗ, выходы которого соединены с блоками обработки координатно-телеметрической информации и с блоком осциллографа и анализатора спектра; выходы второго, третьего и четвертого АРЗ вторым радиоканалом соединены с ФАР РЛС, выход сверхвысокочастотного (СВЧ) сигнала которой через приемное устройство, работающее в диапазоне частот f=1680±10 МГц, первой двунаправленной шиной связи соединен с блоком обработки сигналов АРЗ и управления РЛС, выход которого второй двунаправленной шиной связи соединен с блоком обработки координатно-телеметрической информации, а выходы этого блока третьей двунаправленной шиной связи соединен с блоком осциллографа и анализатора спектра, а шестой двунаправленной шиной связи с монитором оператора РЛС, который, в свою очередь, седьмой двунаправленной шиной связи соединен с блоком осциллографа и анализатора спектра, восьмой двунаправленной шиной связи с устройством ввода/вывода информации, пятой двунаправленной шиной связи с блоком обработки сигналов АРЗ и управления РЛС, выход которого четвертой двунаправленной шиной связи соединен с электромеханическим приводом ФАР РЛС, а его выход сигналами ε и β соединен с входом управления ФАР РЛС по углу места и азимута; блок обработки сигналов АРЗ и управления РЛС через передающее устройство РЛС соединен с СВЧ входом ФАР РЛС.
| Амортизатор для гашения гидравлических ударов, возникающих в пульпопроводе | 1959 |
|
SU127944A1 |
| УНИФИЦИРОВАННАЯ СИСТЕМА РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2014 |
|
RU2576023C1 |
| Способ бисульфитации ванилина, получаемого из лигносульфонатов | 1953 |
|
SU106758A1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2014 |
|
RU2571870C1 |
| US 5379224 A, 03.01.1995 | |||
| WO 2004019065 A1, 04.03.2004 | |||
| JP 2010279034 A, 09.12.2010. | |||

