Изобретение относится к системам наведения ракет, а именно к оборонительно-наступательным системам, и может быть использовано для уничтожения воздушно-подземных целей ракетами.
Наиболее близким к предлагаемому является способ уничтожения воздушно-подземной цели ракетой (RU 2768062), в котором в оборонительно-наступательной системе (ОНС) обнаруживают и сопровождают воздушно-подземную цель на воздушном участке ее траектории и определяют текущие координаты и скорость цели, а также ее характеристики; в ОНС назначают ракету для уничтожения цели и передают данные ракеты на станцию управления (СУ); на СУ запускают ракету; на ракете определяют ее текущие координаты и скорость в воздухе и передают их через СУ в ОНС; в ОНС определяют текущие координаты точки прицеливания для ракеты; в ОНС рассчитывают траекторию и скорость движения ракеты к цели и передают их на СУ; на СУ формируют команды наведения ракеты на цель по расчетной траектории с расчетной скоростью и передают их на ракету.
Однако, такой способ не обеспечивает возможность подхода ракеты к цели на подземном участке ее траектории, что снижает вероятность уничтожения цели.
Цель изобретения - повышение вероятности уничтожения воздушно-подземной цели ракетой.
Предложенный способ заключается в том, что:
- в ОНС обнаруживают и сопровождают воздушно-подземную цель на воздушном участке ее траектории и определяют текущие координаты и скорость цели, а также ее характеристики;
- в ОНС назначают ракету для уничтожения цели и передают данные ракеты на СУ;
- на СУ запускают ракету;
- на ракете определяют ее текущие координаты и скорость в воздухе и передают их через СУ в ОНС;
- в ОНС определяют текущие координаты точки прицеливания для ракеты;
- в ОНС рассчитывают траекторию и скорость движения ракеты к цели и передают их на СУ;
- на СУ формируют команды наведения ракеты на цель по расчетной траектории с расчетной скоростью и передают их на ракету;
- в ОНС в случае приземления цели определяют координаты места ее приземления;
- в ОНС рассчитывают траекторию и скорость движения ракеты к месту приземления цели и передают их на СУ;
- на СУ формируют команды наведения ракеты на место приземления цели по расчетной траектории с расчетной скоростью и передают их на ракету;
- на ракете после подхода к месту приземления цели обнаруживают скважину, образованную целью, и определяют текущие координаты оси скважины;
- на ракете определяют ее текущие координаты под землей и формируют команды наведения ракеты на цель по оси скважины.
ОНС аналогична известной (RU 2753498). Цель аналогична известной (ru.wikipedia.org, подземный реактивный снаряд).
Ракету назначают, исходя из ее эффективности. На ракете, ее координаты и скорость определяют с помощью бортовой инерциальной системы навигации, корректируемой с помощью глобальной спутниковой системы навигации.
Координаты точки прицеливания для ракеты определяют путем выбора наиболее уязвимого места цели в соответствии с ее характеристиками.
Траекторию и скорость движения ракеты рассчитывают из условия обхода ей сторонних объектов и зон действия противоракетной обороны противника, а также из условия столкновения ракеты с точкой прицеливания или подхода к месту приземления цели под требуемым углом с требуемой скоростью.
Чем выше скорость ракеты, тем выше ее инерционность и ниже маневренность. Соотношение скорости и маневренности для ракеты на конечном участке траектории в воздухе оптимизируют путем задания скорости, необходимой и достаточной для уничтожения цели при столкновении.
Скважину обнаруживают с помощью установленного на ракете георадара.
Предложенный способ может быть реализован в системе, блок-схема которой приведена на чертеже.
Блоки: 1 - ОНС; 2 - СУ; 3 - ракета.
Связи между блоками: 1 -2 - данные ракеты, расчетные траектория и скорость движения ракеты к цели, а также расчетные траектория и скорость движения ракеты к месту приземления цели; 2-1 - текущие координаты и скорость ракеты в воздухе; 2-3 - команды наведения ракеты на цель по расчетной траектории с расчетной скоростью, а также команды наведения ракеты на место приземления цели по расчетной траектории с расчетной скоростью; 3-2 - текущие координаты и скорость ракеты в воздухе.

Изобретение относится к системам наведения ракет. В оборонительно-наступательной системе (ОНС) обнаруживают и сопровождают воздушно-подземную цель в воздухе и определяют ее координаты, скорость и характеристики, а также назначают ракету и передают ее данные на станцию управления (СУ), где запускают ракету. На ракете определяют ее координаты и скорость в воздухе и передают их через СУ в ОНС, где определяют координаты точки прицеливания для ракеты, а также рассчитывают траекторию и скорость движения ракеты к цели и передают их на СУ, где формируют команды наведения ракеты и передают их на ракету. В ОНС в случае приземления цели определяют координаты места приземления, а также рассчитывают траекторию и скорость движения ракеты к месту приземления цели и передают их на СУ, где формируют команды наведения ракеты и передают их на ракету, где после подхода к месту приземления цели обнаруживают скважину, образованную целью, и определяют координаты оси скважины, а также определяют координаты ракеты под землей и формируют команды наведения ракеты по оси скважины. Обеспечивается повышение вероятности уничтожения воздушно-подземной цели ракетой. 1 ил.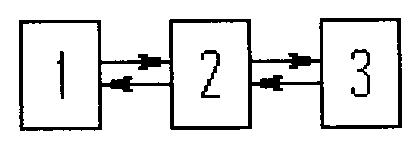
Способ уничтожения воздушно-подземной цели ракетой, заключающийся в том, что в оборонительно-наступательной системе (ОНС) обнаруживают и сопровождают воздушно-подземную цель на воздушном участке ее траектории и определяют текущие координаты и скорость цели, а также ее характеристики; в ОНС назначают ракету для уничтожения цели и передают данные ракеты на станцию управления (СУ); на СУ запускают ракету; на ракете определяют ее текущие координаты и скорость в воздухе и передают их через СУ в ОНС; в ОНС определяют текущие координаты точки прицеливания для ракеты; в ОНС рассчитывают траекторию и скорость движения ракеты к цели и передают их на СУ; на СУ формируют команды наведения ракеты на цель по расчетной траектории с расчетной скоростью и передают их на ракету; отличающийся тем, что в ОНС в случае приземления цели определяют координаты места ее приземления; в ОНС рассчитывают траекторию и скорость движения ракеты к месту приземления цели и передают их на СУ; на СУ формируют команды наведения ракеты на место приземления цели по расчетной траектории с расчетной скоростью и передают их на ракету; на ракете после подхода к месту приземления цели обнаруживают скважину, образованную целью, и определяют текущие координаты оси скважины; на ракете определяют ее текущие координаты под землей и формируют команды наведения ракеты на цель по оси скважины.
| СПОСОБ УНИЧТОЖЕНИЯ ГИПЕРЗВУКОВОЙ МАНЕВРИРУЮЩЕЙ ЦЕЛИ РАКЕТОЙ | 2021 |
|
RU2768062C1 |
| US 5988038 A1, 23.11.1999 | |||
| Способ образования м.и.циферова выработок в земной поверхности | 1973 |
|
SU522759A1 |
| Подземная торпеда | 1932 |
|
SU32959A1 |
| Способ кругового обдува моделей тел вращения | 1959 |
|
SU128308A1 |
| CN 111059966 А, 24.04.2020. | |||

