Изобретение относится к системам наведения ракет, а именно к оборонительно-наступательным системам, и может быть использовано для уничтожения гиперзвуковых маневрирующих целей ракетами.
Известен способ уничтожения гиперзвуковой маневрирующей цели ракетой (RU 2751378), в котором обнаруживают и сопровождают цель и определяют ее текущие координаты и скорость; запускают ракету; на ракете определяют ее текущие координаты и скорость; рассчитывают траекторию полета ракеты к цели; формируют команды наведения ракеты на цель по расчетной траектории.
Наиболее близким к предлагаемому является способ уничтожения гиперзвуковой маневрирующей цели ракетой (RU 2741132), в котором обнаруживают и сопровождают цель и определяют ее текущие координаты и скорость; на станции управления запускают ракету; определяют текущие координаты и скорость ракеты и передают их на станцию управления; рассчитывают траекторию и скорость полета ракеты к цели; на станции управления формируют команды наведения ракеты на цель по расчетной траектории с расчетной скоростью и передают их на ракету.
Однако такие способы не обеспечивают: - высокую надежность обнаружения и сопровождения цели и высокую точность определения ее координат, поскольку не предусматривают обзор цели с различных направлений; - предотвращение столкновения ракеты со сторонними объектами и обход ракетой зон действия противоракетной обороны противника, поскольку не учитывают информацию о таких объектах и зонах; - оптимизацию направления подлета ракеты к цели, т.к. не определяют курс ее следования для вывода ракеты на встречный курс; - защиту наведения ракеты от противодействия со стороны цели, направленного на головку самонаведения ракеты.
Указанные недостатки известных способов снижают вероятность уничтожения цели.
Цель изобретения - повышение вероятности уничтожения гиперзвуковой маневрирующей цели ракетой.
Предложенный способ заключается в том, что:
- в оборонительно-наступательной системе (ОНС) обнаруживают и сопровождают цель и определяют ее текущие координаты и скорость;
- в ОНС определяют траекторию цели, относительно которой она маневрирует, прогнозируют ее продолжение и определяют текущие координаты места выхода ракеты на встречный курс;
- в ОНС назначают ракету и станцию управления для вывода ракеты на встречный курс и уничтожения цели за минимальное время и передают данные ракеты на станцию управления;
- на станции управления запускают ракету;
- на ракете определяют ее текущие координаты и скорость и передают их, через станцию управления, в ОНС;
- в ОНС рассчитывают траекторию и скорость полета ракеты к месту выхода на встречный курс и передают их на станцию управления;
- на станции управления формируют команды наведения ракеты на место выхода на встречный курс по расчетной траектории с расчетной скоростью и передают их на ракету;
- в ОНС, после выхода ракеты на встречный курс, определяют текущие координаты точки прицеливания для ракеты;
- в ОНС рассчитывают траекторию и скорость полета ракеты к цели и передают их на станцию управления;
- на станции управления формируют команды наведения ракеты на цель по расчетной траектории с расчетной скоростью и передают их на ракету.
В ОНС реализуют известный способ (RU 2753498). Цель может быть воздушной или космической.
Траекторию цели, относительно которой она маневрирует, определяют на основе анализа ее фактической траектории - для определения курса следования цели и вывода ракеты на встречный курс. Место выхода ракеты на встречный курс выбирают на прогнозируемом продолжении траектории цели, исходя из необходимости обеспечения ракете времени, достаточного для уничтожения цели.
Ракету назначают, исходя из ее эффективности. На ракете ее координаты и скорость определяют с помощью бортовой инерциальной системы навигации, корректируемой с помощью глобальной спутниковой системы навигации.
Координаты точки прицеливания для ракеты определяют путем выбора наиболее уязвимого места цели на основании информации, полученной с помощью станций поиска и сопровождения в результате обзора цели с различных направлений. Благодаря точному определению координат и скорости цели, головка самонаведения на ракете не требуется.
Траекторию и скорость полета ракеты рассчитывают, исходя из необходимости предотвращения ее столкновения со сторонними объектами, необходимости обхода ракетой зон действия противоракетной обороны противника и необходимости столкновения ракеты с точкой прицеливания под требуемым углом с требуемой скоростью.
Чем выше скорость ракеты, тем выше ее инерционность и ниже маневренность. Соотношение скорости и маневренности для ракеты на конечном участке траектории оптимизируют путем задания скорости, необходимой и достаточной для уничтожения цели при столкновении.
Предложенный способ может быть реализован в системе, блок-схема которой приведена на чертеже.
Блоки: 1 - ОНС; 2 - станция управления; 3 - ракета, запущенная со станции управления.
Связи между блоками: 1-2 - данные ракеты, назначенной для уничтожения цели, расчетные траектория и скорость полета ракеты к месту выхода на встречный курс, а также расчетные траектория и скорость полета ракеты к цели; 2-1 - текущие координаты и скорость ракеты; 2-3 - команды наведения ракеты на место выхода на встречный курс по расчетной траектории с расчетной скоростью, а также команды наведения ракеты на цель по расчетной траектории с расчетной скоростью; 3-2 - текущие координаты и скорость ракеты.

Изобретение относится к системам наведения ракет, а именно к оборонительно-наступательным системам. В оборонительно-наступательной системе (ОНС) обнаруживают и сопровождают цель и определяют ее координаты и скорость. В ОНС определяют траекторию цели, относительно которой она маневрирует, прогнозируют ее продолжение и определяют координаты места выхода ракеты на встречный курс, а также назначают ракету и станцию управления для вывода ракеты на встречный курс и уничтожения цели за минимальное время и передают данные ракеты на станцию управления, где запускают ракету. На ракете определяют ее координаты и скорость и передают их, через станцию управления, в ОНС, где рассчитывают траекторию и скорость полета ракеты к месту выхода на встречный курс и передают их на станцию управления, где формируют команды наведения ракеты на место выхода на встречный курс и передают их на ракету. В ОНС определяют текущие координаты точки прицеливания для ракеты, а также рассчитывают траекторию и скорость полета ракеты к цели и передают их на станцию управления, где формируют команды наведения ракеты на цель и передают их на ракету. Повышается вероятность уничтожения цели. 1 ил.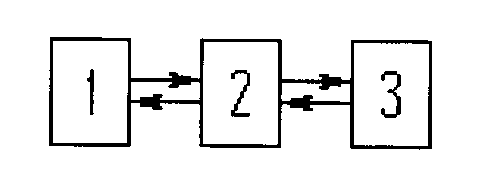
Способ уничтожения гиперзвуковой маневрирующей цели ракетой, заключающийся в том, что обнаруживают и сопровождают цель и определяют ее текущие координаты и скорость; на станции управления запускают ракету; определяют текущие координаты и скорость ракеты и передают их на станцию управления; рассчитывают траекторию и скорость полета ракеты к цели; на станции управления формируют команды наведения ракеты на цель по расчетной траектории с расчетной скоростью и передают их на ракету; отличающийся тем, что обнаружение и сопровождение цели и определение ее текущих координат и скорости осуществляют в оборонительно-наступательной системе (ОНС); в ОНС определяют траекторию цели, относительно которой она маневрирует, прогнозируют ее продолжение и определяют текущие координаты места выхода ракеты на встречный курс; в ОНС назначают ракету и станцию управления для вывода ракеты на встречный курс и уничтожения цели за минимальное время и передают данные ракеты на станцию управления; текущие координаты и скорость ракеты определяют на ракете и со станции управления передают их в ОНС; в ОНС рассчитывают траекторию и скорость полета ракеты к месту выхода на встречный курс и передают их на станцию управления; на станции управления формируют команды наведения ракеты на место выхода на встречный курс по расчетной траектории с расчетной скоростью и передают их на ракету; в ОНС, после выхода ракеты на встречный курс, определяют текущие координаты точки прицеливания для ракеты; траекторию и скорость полета ракеты к цели рассчитывают в ОНС и передают их на станцию управления.
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ | 2006 |
|
RU2331036C2 |
| СПОСОБ НАВЕДЕНИЯ РАКЕТЫ | 2018 |
|
RU2701671C1 |
| СПОСОБ ФОРМИРОВАНИЯ УПРАВЛЕНИЯ РАКЕТ ПРИ НАВЕДЕНИИ НА ГРУППУ МАНЕВРИРУЮЩИХ ЦЕЛЕЙ | 2010 |
|
RU2464520C2 |
| СПОСОБ СТРЕЛЬБЫ ПО ДВИЖУЩЕЙСЯ ЦЕЛИ ПРОТИВОТАНКОВОЙ УПРАВЛЯЕМОЙ РАКЕТОЙ | 2014 |
|
RU2564051C1 |
| US 5096139 A1, 17.03.1992. | |||

