Изобретение относится к устройству для осуществления электрохирургического вмешательства на пациенте, прежде всего в урологии.
При хирургическом вмешательстве, прежде всего при электрохирургических вмешательствах, несмотря на применение тока высокой частоты, могут возникать нейромышечные раздражения. Этот эффект наблюдается также в том случае, когда частота высокочастотного тока располагается выше рассматриваемой в качестве критической границы в 100 кГц. Прежде всего, это относится к трансуретральной электрорезекции мочевого пузыря, а также к трансуретральной электрорезекции простаты в урологии и к гистероскопической трансцервикальной резекции в гинекологии. Нейромышечные раздражения в этой области могут повлечь за собой стимуляцию запирательного нерва и сопряженные с этим внезапные и сильные сокращения отводящих мышц ноги. Эти сокращения могут приводить к неконтролируемым движениям у пациента, например, введенного в его мочевой пузырь инструментария, с опасностью перфорации стенки мочевого пузыря. По этой проблеме существует обширная литература:
1 Ozer K, Horsonali МО, Gorgel SN et al. Bladder injury secondary to obturator reflex is more common with plasmakinetic transurethral resection than monopolar transurethral resection of bladder cancer. Cent European J Urol 2015; 68: 284-288.
2 Ferlay J, Autier P, Boniol M et al. Estimates of the cancer incidence and mortality In Europe in 2006. Ann Oncol. 2007; 18: 581-592.
3 Kausch 1, Doehn C, Jocham D. Recent improvements in the detection and treatment of nonmuscle-invasive bladder cancer. Expert Rev Anticancer Ther 2006; 6: 1301-1311
4 DeSantis CE, Lin CC, Mariotto AB et al. Cancer treatment and survivorship statistics, 2014. CA Cancer J. Clin 2014; 64: 252-271.
5 Aas-Eng MK, Langebrekke A, Hudelist G. Complications in operative hysteroscopy - is prevention possible? Acta Obstet Gynecol Scand 2017; 96: 1399-1403.
6 Shulman MS, Vellayappan U, Monaghan TG et al. Simultaneous bilateral obturator nerve stimulation during transurethral electrovaporization of the prostate. J. Clin Anesth 1998; 10: 518-521.
7 Magora F, Rozin R, FJen-Menachem V et al. Obturator nerve block: an evaluation of technique. British Journal of Anaesthesia 1969; 41: 695-698.
8 Atanassoff PG, Weiss BM, Brull SJ et al. Electromyographic comparison of obturator nerve block to three-in-one block. Anesth Analg 1995; 81: 529533.
9 Atanassoff PG, Weiss BM, Brull SJ et al. Compound motor action potential recording distinguishes differential onset of motor block of the obturator nerve in response to etidocaine or bupivacaine. Anesth Analg 1996; 82: 317-320.
10 Bolat D, Aydogdu 0, Tekgul ZT et al. Impact of nerve stimulator-guided obturator nerve block on the short-term outcomes and complications of transurethral resection of bladder tumour: A prospective randomized controlled study. Can Urol Assocl 2015; 9: E780-4.
11 Khorrami M, Hadi M, Javid A et al. A comparison between blind and nerve stimulation guided obturator nerve block in transurethral resection of bladder tumor. J Endourol 2012; 26: 1319-1322.
12 Burger M, Wieland W-F. Transurethrale Resektion der Blase. In: Hofmann R, ed. Endoskopische Urologie. Berlin, Heidelberg: Springer Berlin Heidelberg; 2009: 151-163.
13 Gupta NP, Salni AK, Dogra PN et al. Bipolar energy for transurethral resection of bladder tumours at low-power settings: initial experience. Biflint 2011; 108: 553-556.
14 Biserte J, Brunetaud IM, Rigot JM et al. Traitement des tumeurs superficielles de vessie par laser Argon, Acta Urol Belg 1989; 57: 697-701.
15 Alschibaja M, May F, Treiber U et al. Recent improvements in transurethral high-frequency electrosurgery of the prostate. BJU Int 2006; 97: 243-246.
16 Shiozawa H, Aizawa T, Ito T et al. A new transurethral resection system: operating in saune environment precludes obturator nerve reflexes. 1 Urol 2002; 168: 2665-2667.
17 Wendt-Nordahl G, Hacker A, Reich О et al. The Vista system: a new bipolar resection device for endourologlcal procedures: comparison with conventional resectoscope. Eur Urol 2004; 46: 586-590.
18 Zhao С, Tang K, Yang H et al. Bipolar Versus Monopolar Transurethra I Resection of Nonmusclelnvasive Bladder Cancer: A Meta-Analysis. 1 Endourol 2016; 30: 5-12.
19 Venkatramani V, Panda A, Monojkumar R et al. Monopolar versus bipolar transurethral resection of bladder tumors: a single center, parallel arm, randomized, controlled trial. 1 Urol 2014; 191: 17031707.
20 Sugihara T, Yasunaga H, Horiguchi H et al. Comparison of perioperative outcomes Including severe bladder injury between monopolar and bipolar transurethral resection of bladder tumors: a Imputation based comparison. J Urol 2014; 192: 13551359.
21 Mashni 1, Godoy G, Haarer С et al. Prospective evaluation of plasma kinetic bipolar resection of bladder cancer: comparison to monopolar resection and pathologic findings. Int Urol Nephrol 2014; 46: 1699-1705.
Целью изобретения является создание устройства, обеспечивающего возможность электрохирургических вмешательств на пациенте с уменьшенным риском операции.
Эта цель достигнута в хирургическом устройстве для осуществления электрохирургического вмешательства на пациенте, содержащем прибор, имеющий генератор для генерации напряжения воздействия и управляющее устройство для управления генератором, присоединяемый к генератору инструмент, имеющий по меньшей мере один электрод для воздействия напряжением на ткань пациента, и датчик движения для регистрации движения пациента, закрепляемый на пациенте и соединяемый с управляющим устройством, причем управляющее устройство содержит устройство оценки сигналов, выполненное с возможностью сравнения сигнала от датчика движения по меньшей мере с первым и вторым пороговыми уровнями для генерации предупредительного сигнала при превышении первого порогового уровня и сигнала выключения для выключения генератора при превышении второго порогового уровня, причем первый пороговый уровень ниже второго порогового уровня.
Таким образом, дополнительно к обнаружению превышения второго порогового уровня устройство оценки сигналов данных выполнено для выдачи предупредительного сигнала до достижения этого второго порогового уровня при превышении первого, более низкого, порогового уровня. Например, первый пороговый уровень для ускорения может быть задан примерно в 3 м/с2, в то время как второй пороговый уровень, который должен приводить к выключению, то есть к защитному отключению, составляет, например, для ускорения 11 м/с2.
Соответственно при осуществлении изобретения сигналы от датчика движения, установленного на теле пациента, оцениваются на предмет того, насколько сильно выражены передаваемые ими движения пациента. При слабых подергиваниях, сила которых превышает первый пороговый уровень, но не превышает второго порогового уровня, оперирующему врачу можно не прерывать вмешательство. При этом прибор будет лишь выдавать предупредительные сигналы, чтобы оперирующий врач работал с обостренным вниманием и был готов к выключению прибора. Если же непроизвольные движения нарастают, и их сила превысит второй пороговый уровень, прибор выключится, но это событие не застанет оперирующего врача врасплох. После выдачи предупреждения оперирующий врач может скорректировать технику ведения операции, чтобы избежать травмирования пациента при наступлении в процессе операции неожиданных событий, таких как внезапное выключение прибора или резкое вздрагивание пациента, либо существенно уменьшить тяжесть неблагоприятных последствий таких событий, что в конечном итоге повышает безопасность пациента и позволяет оперирующему врачу проводить вмешательство более уверенно.
Предлагаемое в изобретении хирургическое устройство предназначено, прежде всего, для осуществления электрохирургического вмешательства на пациенте, например, для осуществления трансуретральной электрорезекции мочевого пузыря, трансуретральной электрорезекции простаты или трансцервикальной резекции (TURB, TURP, TCR). Как указано выше, в состав устройства входит прибор с генератором для создания напряжения обработки для питания инструмента. Помимо этого, в состав прибора входит управляющее устройство для управления генератором. Управление генератором включает в себя, по меньшей мере, его включение и выключение. Помимо этого, управление генератором может также охватывать назначение операционного режима, такого как резание, абляция, коагуляция и так далее. Различных операционных режимов достигают посредством настройки различных напряжений генератора и/или различных модуляций напряжения на генераторе. Модуляция напряжения может быть представлена, например, широтно-импульсной модуляцией, частотной модуляцией или тому подобным.
Помимо этого, в состав устройства входит датчик, который выполнен для закрепления на пациенте и для регистрации движения пациента. Датчик соединен с управляющим устройством. За счет этого обеспечена возможность быстрого распознавания вызванных нейромышечной стимуляцией мышечных сокращений, и использования их для преобразования управляющего сигнала. Например, таким образом, при обнаружении нежелательного движения пациента, генератор может быть выключен, или режим его работы подвергнут воздействию иным образом. Например, управляющее устройство может быть выполнено для уменьшения мощности генератора при регистрации нежелательного движения пациента и/или для изменения модуляции высокочастотного напряжения и/или для временного или окончательного выключения генератора.
Быстрое отключение генератора при обнаружении нежелательного движения пациента обеспечивает возможность быстрого устранения нейромышечных стимуляций и, тем самым, ограничения мышечных сокращений на невредном, прежде всего неопасном, уровне. За счет этого предотвращена перфорация стенки мочевого пузыря или другие оперативные осложнения вследствие мышечных сокращений.
Предпочтительно, датчик движения является датчиком ускорения. Также может использоваться датчик положения. Выдаваемый датчиком, выполненным в виде датчика положения, сигнал может быть однократно или многократно продифференцирован по времени (взята производная по времени), что обеспечивает генерацию информативного по внезапным движениям сигнала. За счет этого могут быть предотвращены нежелательные отключения вследствие медленных или незначительных движений пациента, которые являются безвредными для результата операции. Тем не менее, внезапные подергивания или сильные движения могут быть зарегистрированы уже в их начале. Датчик генерирует соответствующие сигналы, которые оцениваются схемой оценивания сигнала и используются для отключения генератора.
Выгодным образом, датчик имеет крепежное устройство, посредством которого он является закрепляемым на конечности, прежде всего на стопе или на ноге пациента, например на его икре. В качестве крепежного устройства подходящей является обернутая вокруг конечности пациента в подходящем месте лента или также предусмотренная на датчике клейкая поверхность, с помощью которой датчик может быть закреплен на коже пациента в сцеплении с ней.
Устройство обработки сигналов может содержать один или несколько фильтров (фильтр верхних частот, фильтр нижних частот, полосовой фильтр) линейные или нелинейные усилители и тому подобное.
Управляющее устройство может быть выполнено для блокировки генератора после генерации сигнала выключения, а также для запроса производимой вручную разблокировки. Альтернативно, это устройство может быть выполнено для генерации сигнала выключения на заданный промежуток времени, например 3 сек. В пределах этого промежутка времени оператор может принять решение относительно своих дальнейших действий.
Помимо этого, является возможным оснащение управляющего устройства регулировочным устройством, посредством которого промежуток времени отключения является регулируемым. Помимо этого, является возможным оснащение управляющего устройства органами ввода для регулировки первого и/или второго порогового уровня. Помимо этого, управляющее устройство может иметь орган управления для деактивации той части управляющего устройства, которая контролирует прибывающий от датчика сигнал.
Предпочтительно, выдача сигнала выключения происходит без замедления, и таким образом, предпочтительно, в течение менее 30 мс, более предпочтительно менее 20 мс, после начала заметной моторной активности снабженной датчиком конечности. В этот короткий промежуток времени вызванные мышечным сокращением ходы движений конечностей являются все еще очень малыми таким образом, что вследствие этого, производимые вручную действия оператора, также и при затруднительных операциях, не подвержены существенным затруднениям.
Устройство согласно изобретению может быть применено как для биполярных инструментов, которые имеют два электрода, так и для монополярных инструментов, которые не имеют собственного контрэлектрода или нейтрального электрода и для которых требуется закрепление нейтрального электрода на пациенте.
Является возможным закрепление датчика для регистрации движения, прежде всего ускорения, конечности пациента на или в нейтральном электроде, который в этом случае подлежит размещению, например, на икре пациента.
Изобретение можно быть осуществлено как на выполненных согласно изобретению приборах, так и на приборах, имеющих свойственное приборам управляющее устройство, которые не выполнено для оценки сенсорных сигналов датчика. В таких приборах, в этом случае, причисляемый к управляющему устройству участок может быть размещен вне прибора. Такой соединенный с датчиком участок может быть размещен, например, в переключателе активации, например в ножном переключателе, или в отдельном корпусе, который подключен между приходящей от инструмента или ножного переключателя линией активации и входом активации прибора.
Другие подробности выгодных вариантов осуществления изобретения являются предметом формулы изобретения, а также чертежа и сопутствующего описания. Показано на:
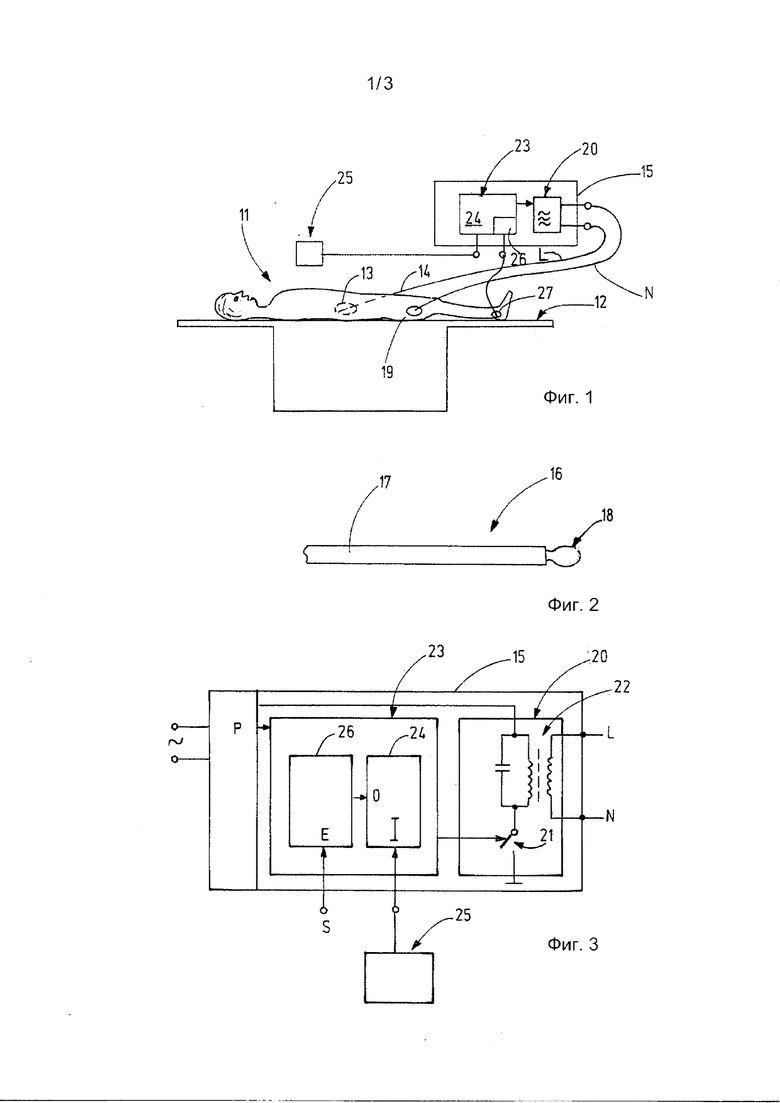
Фиг. 1 - устройство согласно изобретению при применении на пациенте, в схематичном представлении,
Фиг. 2 - инструмент для применения на пациенте, на схематичном местном
виде,
Фиг. 3 - прибор для питания инструмента, на схематичной блочной схеме,
Фиг. 4 - схема оценивания сигнала для прибора согласно фиг. 3, в виде блочной схемы,
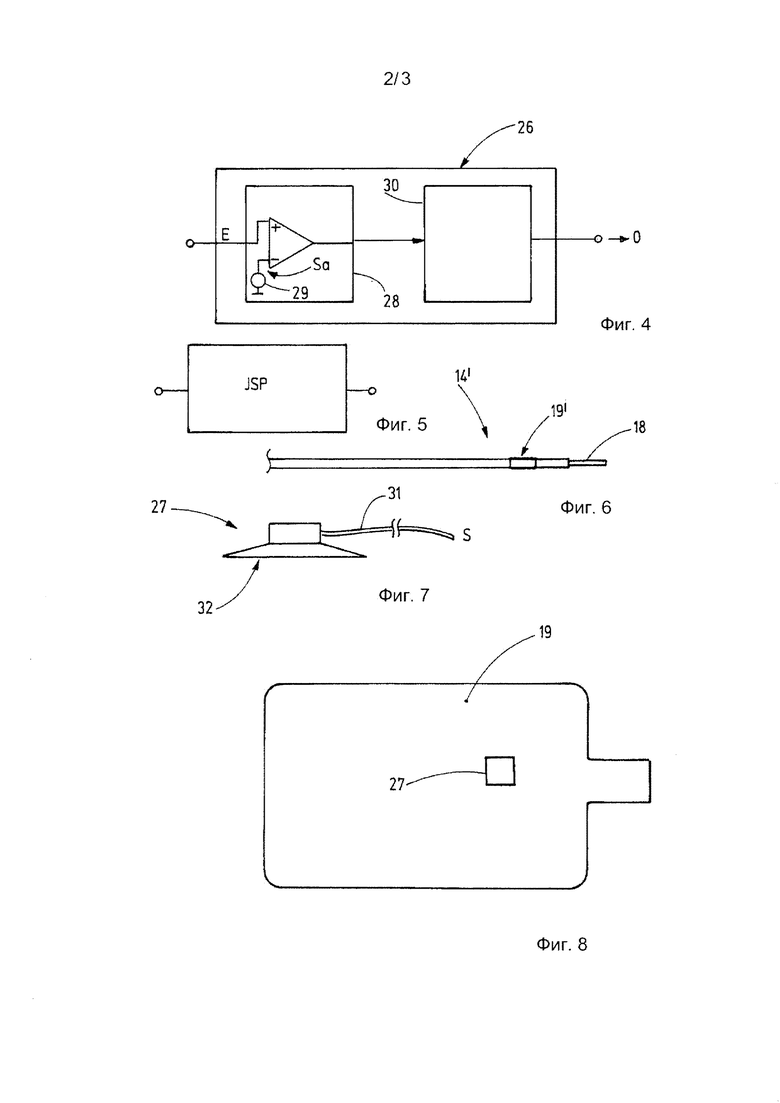
Фиг. 5 - устройство обработки сигналов, схематично,
Фиг. 6 - измененный инструмент для обработки пациента согласно фиг. 1,
Фиг. 7 датчик для закрепления на пациенте согласно фиг. 1, на виде сбоку,
Фиг. 8 - нейтральный электрод с датчиком, на схематичном виде сверху,
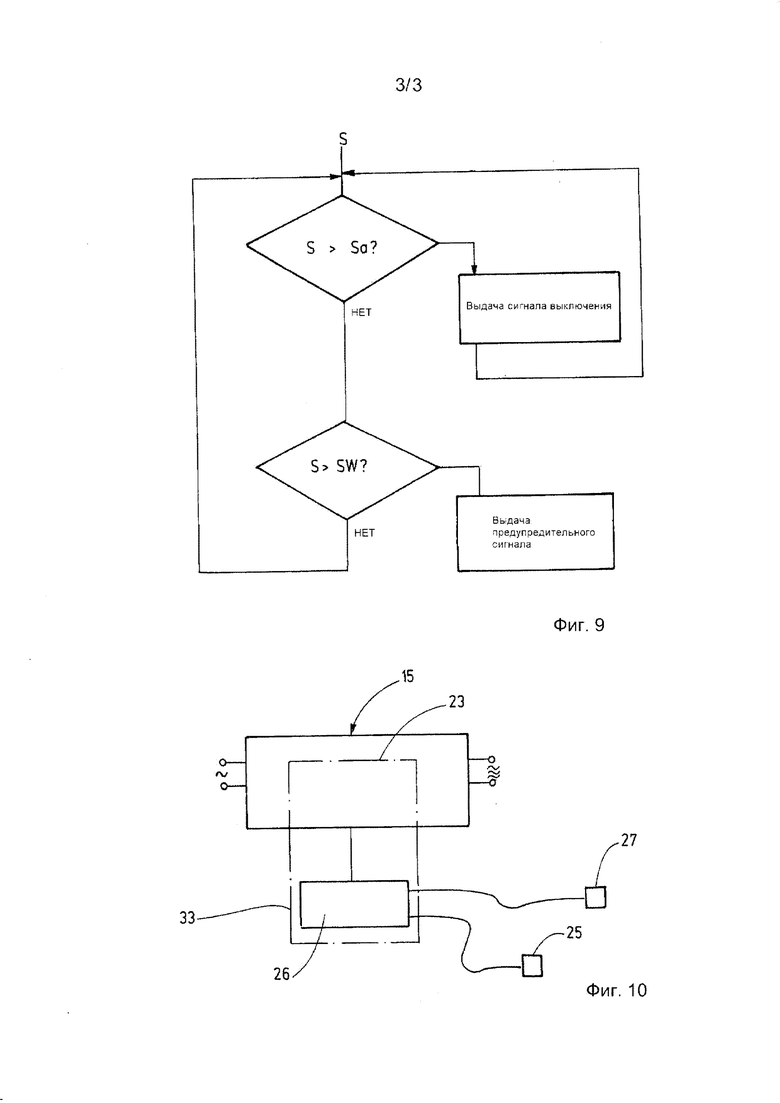
Фиг. 9 - функционирование устройства оценки сигналов в виде диаграммы, и
Фиг. 10 - измененный вариант осуществления устройства, во фрагментарном представлении.
На фиг. 1 проиллюстрирована операционная ситуация, при которой пациент 11 закреплен на столе 12 для осуществления хирургического вмешательства, которое требуется выполнить, например, в полости 13 тела пациента, например, в урогенитальном тракте. Для этого в пациента 11 введен инструмент 14, который соединен с питающим прибором 15. Инструмент 14 является, например, зондом 16, который имеет жесткий или гибкий шток 17 с электродом 18 на его конце. При этом может подразумеваться, как представлено, монополярный инструмент. В этом случае на пациенте 11 размещен нейтральный электрод 19, который образован, например, посредством распределяющего ток электропроводного липкого пластыря.
Прибор 15 содержит генератор 20, который предназначен для подачи подходящего для осуществления хирургического вмешательства напряжения высокой частоты. Обычно напряжение располагается в диапазоне выше 100 В, предпочтительно, выше 200 В, с частотой, предпочтительно, существенно выше 100 кГц. Напряжение высокой частоты может быть немодулированным или модулированным, например широтно-импульсно-модулированным. Электрод 18 инструмента 14, как представлено на фиг. 1, соединен с выходом генератора 20 посредством электрической линии L. С другим выходом генератора 15 посредством линии М соединен нейтральный электрод 19.
Генератор 20 может состоять, как это иллюстрирует фиг. 3, из генератора мощности высокой частоты, переключающий элемент 21 которого возбуждает колебательный контур 22, питающее напряжение с которого для инструмента 14 может быть снято через трансформатор или иным образом. Для управления генератором 20 служит управляющее устройство 23, которое воздействует, например, на переключающий элемент 21 для длительного или импульсного возбуждения колебательного контура 22. В состав прибора 15 входит сетевой блок питания или иной источник Р мощности для снабжения управляющего устройства 23 и генератора 20.
Управляющее устройство 23 выполнено, по меньшей мере, для активации и деактивации генератора 20. В активной фазе переключающий элемент 21 непрерывно открывается и закрывается, в то время как в деактивированной фазе остается открытым (непроводящим).
Управляющее устройство 23 содержит блок 24 активации с входом I активации, который соединен с переключателем 25 активации. Он приводится в действие, предпочтительно, вручную и, например, выполнен в виде ножного переключателя или в виде переключателя на инструменте 14. Помимо этого, блок 24 активации имеет блокировочный вход 0, который соединен с коммутационным блоком 26. Коммутационный блок имеет вход Е, к которому присоединен датчик 27.
Датчик 27 может быть выполнен как датчик положения или, предпочтительно, прежде всего, как датчик ускорения. Датчик 27 предназначен для преобразования своего движения в электрический сигнал. Прежде всего, датчик 27 предназначен для выдачи сигнала, соответствующего скорости или ускорению движения.
Коммутационный блок 26 отдельно проиллюстрирован на фиг. 4. Он может иметь, например, компаратор 28, который сравнивает приходящие от датчика 27 сигналы с пороговым уровнем sa, который предоставлен, например, подателем 29 порогового уровня. Наличествующий на выходе компаратора 28 сигнал обозначает те случаи, когда сигнал от датчика 27 превышает пороговый уровень sa. Выходной сигнал компаратора 28 может быть направлен на последующую обработку, например, в блоке 30. Этот блок, при потребности, обеспечивает возможность выполнения и других функций. Такие функции могут быть представлены нижеследующим образом: формирование блокировочного сигнала для заданного или для регулируемого промежутка времени, длительная генерация сигнала выключения до возврата в исходное состояние или тому подобное. Сигнал на возврат в исходное состояние может быть подан, например, переключателем 25 активации или отдельным переключателем возврата в исходное состояние.
Факультативно, между датчиком 27 и входом Е коммутационного блока может быть размещено устройство обработки сигналов, например, в форме цифрового процессора обработки сигналов - DSP. Он может быть запрограммирован для фильтрации или иной обработки сигналов от датчика 27. Такая обработка сигналов может охватывать собой блоки фильтрации, блоки усиления, блоки распознавания образов или тому подобное. Блоки фильтрации могут быть представлены фильтрами нижних частот, фильтрами верхних частот, полосовыми фильтрами. Блоки усиления могут быть представлены линейными или нелинейными блоками усиления.
Описанное в данном случае устройство функционирует описанным ниже образом.
Предпосылкой является, что непредставленный на фиг. 1 оператор произвел введение представленного инструмента 14 в пациента 11 и активировал его с помощью переключателя 25 активации. Сначала коммутационный блок 26 является неактивным, поэтому управляющее устройство 23 разблокирует функционирование генератора 20. Генератор 20 подает на инструмент 14, прежде всего на его электрод 18, напряжение высокой частоты, оказывающее воздействие на ткани пациента 11. Нейтральный электрод 19 захватывает подведенный к пациенту ток и отводит его к генератору 20.
Теперь прибор может направлять исходящий от электрода 18 ток в нервный путь, что может повлечь за собой значительное движение пациента 11, прежде всего, поблизости от запирательного нерва, вплоть до внезапного сокращения отводящей мышцы ноги. Незамедлительно после начала такого движения, датчик 27 регистрирует это движение, прежде всего скорость или ускорение движения. Если сигнал от датчика 27 превосходит задаваемый подателем 29 порогового уровня пороговый уровень sa, генерируется сигнал выключения.
Блок 30 обработки может генерировать, если он выполнен, например, как моновибратор, в течение жестко установленного или задаваемого промежутка времени, например 3 сек, сигнал выключения, который подается во вход 0 блока 24 активации. Он за счет этого выключает активацию генератора 20. Генератор 20 оказывается выключенным, и он более не подает напряжение, по меньшей мере, на протяжении заданного блоком 30 обработки времени блокировки. Тем самым, создано эффективное препятствие последующему раздражению нервов, и таким образом, дальнейшему движению ноги. Несмотря, по меньшей мере, на кратковременность прерывания процесса обработки к данному моменту времени, тем не менее, могут быть предотвращены существенные опасности травмирования в результате внезапных движений ноги пациента 11. Тем самым, также эффективно предотвращены возможные в противном случае операционные осложнения.
В описанном в данном случае изобретении являются возможными многочисленные модификации. Первым во всех описанных выше и ниже вариантах осуществления возможным дополнением является использование нескольких датчиков 27, которые могут быть закреплены на различных местах конечности или на различных конечностях, прежде всего на обеих ногах, пациента 11. В этом случае сигналы от одного или нескольких датчиков могут быть суммированы и направлены на вход Е компаратора 28. Также для каждого датчика может быть предусмотрен собственный компаратор с собственным входом, причем выходные сигналы этих компараторов могут быть логически сложены таким образом, что отключение производится в том случае, когда по меньшей мере один из компараторов подает сигнал выключения (логическое сложение).
Помимо этого, является возможным размещение коммутационного блока 26 вне прибора 15. В этом случае все еще понимаемый в качестве части управляющего устройства прибора 15 коммутационный блок 26 размещен вне прибора 15, например, в переключателе 25 активации. В этом случае коммутационный блок 26 может быть выполнен согласно каждому из описанных выше вариантов осуществления, и он может быть выполнен для контроля одного или нескольких датчиков. В случае отключения он может прерывать, например, подаваемый переключателем 24 активации на вход I управляющего устройства 23 сигнал или замыкать его накоротко.
Коммутационный блок также может быть размещен в инструменте 14, прежде всего, когда переключатель 25 активации размещен на инструменте. При этом является предпочтительным, когда датчик 27 соединен с коммутационным блоком посредством беспроводного соединения.
В другом измененном варианте осуществления коммутационный блок может быть присоединен к выходу генератора в составе генератора 20, например, для замыкания накоротко приложенного там напряжения при возникновении события отключения. Альтернативно, коммутационный блок 26 может быть встроен в инструмент 14.
Датчик 27 отдельно проиллюстрирован на фиг. 7 схематичным образом. Он может быть выполнен как беспроводной датчик, а генерируемый им сигнал, например сигнал, характеризующий скорость или ускорение движения, может быть передан беспроводным образом на коммутационный блок 26. Альтернативно, датчик 27 может быть снабжен кабелем 31, который подлежит соединению с присоединением Е коммутационного блока 26.
Для крепления на пациенте, датчик 27 может быть снабжен клейкой поверхностью 32, которая покрыта клейким или адгезионный составом, обеспечивающим возможность закрепления на коже пациента. Альтернативно, на датчике 27 может быть размещен крепежный ремень, с помощью которого датчик может быть пристегнут к пациенту.
Помимо этого, является возможным контроль действительности выдаваемых датчиком 27 сигналов, время от времени или на постоянной основе для своевременного обнаружения, например, неправильно закрепленного на пациенте или отпавшего с него датчика 27. Для этого каждый из описанных вариантов осуществления может быть дополнен контрольным блоком, который получает отправляемый датчиком сигнал. Контрольный блок может быть выполнен для классификации выдаваемого датчиком 27 сигнала в качестве действительного сигнала только в том случае, когда он выделяется над исходящими от датчика 27 фоновыми шумами, и таким образом, указывает на настоящие микродвижения пациента 11. При отсутствии дальнейшего приема таких сигналов, коммутационный блок 26 может сигнализировать о недействительности сигнала датчика. Может быть предусмотрено, что в таком случае контрольный блок останавливает (блокирует) генератор 20.
Помимо этого, является возможным закрепление датчика 27 на нейтральном электроде 19, как схематически иллюстрирует фиг. 8. Такие решения, прежде всего, подходят для монополярных инструментов согласно фиг. 2.
Тем не менее, применение биполярных инструментов 14' также является возможным, как схематически проиллюстрировано на фиг. 6. На этом инструменте 14' опять-таки размещен электрод 18, а также дополнительный нейтральный электрод 19'. В этом случае обе линии L и N идут от инструмента 14 к генератору 20. В остальном, вышеуказанное описание остается действительным относительно всех конструкций, которые, соответствующим образом, не относятся специально к нейтральному электроду 19 согласно фиг. 8.
Другая модификация изобретения состоит в усовершенствованном контроле сигнала датчика, например, посредством того, что его подвергают сравнению не только лишь с пороговым уровнем sa для выключения, но дополнительно, с более низким пороговым уровнем sw, что обеспечивает возможность предостережения хирурга о наличии нейромышечных реакций. Фиг. 9 иллюстрирует для этого функционирование соответствующего коммутационного блока. Он выполнен для проведения сравнения сигнала S сначала с пороговым уровнем sa для выключения и, если он достигнут, для выдачи сигнала выключения. Если, напротив, пороговый уровень sa не достигнут, сигнал S подвергают сравнению с более низким пороговым уровнем sw. Если и он оказывается недостигнутым, не предпринимается никаких действий. Если, однако, сигнал S превосходит пороговый уровень sw, выдается предупредительный сигнал. Такой сигнал может быть представлен акустическим сигналом, оптическим сигналом или тактильным сигналом, например вибрацией рукоятки. Описанный выше контроль по меньшей мере двух пороговых уровней может находить применение во всех описанных выше вариантах осуществления устройства согласно изобретению.
Помимо этого, для всех описанных вариантов осуществления, вместо выключения генератора 20 является возможным лишь уменьшение его мощности или изменение вида модуляции. Однако для всех вариантов осуществления изобретения общим является то обстоятельство, что предусмотрен по меньшей мере один датчик 27, который регистрирует моторное раздражение пациента, предпочтительно, на его конечности, и, что посредством этого регистрируемого движения подвергается воздействию функционирование генератора 20, и таким образом, напряжение на электроде 18 инструмента 14. Воздействие имеет целью, прежде всего, уменьшение или устранение лежащего в основе движения пациента нейромышечного раздражения.
Хирургическое устройство согласно изобретению включает в себя прибор 15 с генератором 20, а также инструмент 14, который получает питание от генератора 20. Помимо этого, в состав устройства входит датчик 27, который в процессе эксплуатации размещен на пациенте, прежде всего на его конечности, для регистрации движения пациента, прежде всего его конечности. Датчик соединен с управляющим устройством 23, которое, когда датчик 27 регистрирует превышающее пороговый уровень sa движение пациента 11, изменяет функционирование генератора 20, прежде всего отключает генератор 20.
За счет этого может быть предотвращено травмирование пациента 11, которое может возникнуть в результате его невольных подергиваний во время операционного процесса.
Перечень ссылочных обозначений:
11 - пациент
12 - стол
13 - полый орган
14, 14' - инструмент
15 - прибор
16 - зонд
17 - шток
18 - электрод
19, 19' - нейтральный электрод
20 - генератор
L - линия
N - линия
21 - переключающий элемент
22 - колебательный контур
23 - управляющее устройство
24 - блок активации
I - вход активации
25 - переключатель активации
0 - блокировочный вход
26 - коммутационный блок/устройство оценки сигналов
Е - вход
S - сигнал датчика
27 - датчик
28 - компаратор
sw - первый пороговый уровень (для подачи предупреждения)
sa - второй пороговый уровень (для выключения)
29 - податель порогового уровня
30 - блок обработки
31 - кабель
32 - крепежное устройство (клейкая поверхность)
33 - участок устройства оценки сигналов
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЫБОРА ТАКТИКИ ЭНДОСКОПИЧЕСКОГО ЛЕЧЕНИЯ ДОБРОКАЧЕСТВЕННОЙ ГИПЕРПЛАЗИИ ПРЕДСТАТЕЛЬНОЙ ЖЕЛЕЗЫ | 2011 |
|
RU2469673C1 |
| Способ эндоскопического лечения немышечно-инвазивного рака мочевого пузыря, локализованного на передней стенке | 2024 |
|
RU2840269C1 |
| СПОСОБ УДАЛЕНИЯ ОПУХОЛИ МОЧЕВОГО ПУЗЫРЯ ЕДИНЫМ БЛОКОМ С ПРИМЕНЕНИЕМ ТЕХНИКИ "ЦИФЕРБЛАТ-6" | 2024 |
|
RU2841106C1 |
| Способ предотвращения травмы наружного сфинктера уретры при выполнении трансуретральной лазерной энуклеации доброкачественной гиперплазии предстательной железы | 2021 |
|
RU2757678C1 |
| СПОСОБЫ И УСТРОЙСТВОА ДЛЯ АКТИВАЦИИ БУРОЙ ЖИРОВОЙ ТКАНИ С ИСПОЛЬЗОВАНИЕМ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ | 2010 |
|
RU2580293C2 |
| Способ снижения массы тела при ожирении чрескожной стимуляцией блуждающего нерва | 2024 |
|
RU2823458C1 |
| Способ лечения гипотонии мочевого пузыря с использованием мезенхимальных стволовых клеток жировой ткани | 2019 |
|
RU2712029C1 |
| СПОСОБ ЭНДОСКОПИЧЕСКОГО ЛЕЧЕНИЯ СТРИКТУРЫ ВЕЗИКОУРЕТРАЛЬНОГО АНАСТОМОЗА ПОСЛЕ РАДИКАЛЬНОЙ ПРОСТАТЭКТОМИИ | 2018 |
|
RU2694217C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОБЪЕМА РЕЗЕКЦИИ МОЧЕВОГО ПУЗЫРЯ ПРИ ЭНДОСКОПИЧЕСКОМ ЛЕЧЕНИИ РАКА МОЧЕВОГО ПУЗЫРЯ | 2006 |
|
RU2317009C1 |
| Способ профилактики рубцовой деформации шейки мочевого пузыря после эндоскопического удаления гиперплазии простаты | 2019 |
|
RU2725549C1 |
Изобретение относится к медицинской технике. Хирургическое устройство для осуществления электрохирургического вмешательства на пациенте содержит прибор, имеющий генератор для генерации напряжения воздействия, и управляющее устройство для управления генератором. Присоединяемый к генератору инструмент устройства имеет по меньшей мере один электрод для воздействия напряжением на ткань пациента. Также хирургическое устройство содержит датчик движения для регистрации движения пациента, закрепляемый на пациенте и соединяемый с управляющим устройством. Управляющее устройство содержит устройство оценки сигналов, выполненное с возможностью сравнения сигнала от датчика движения по меньшей мере с первым и вторым пороговыми уровнями для генерации предупредительного сигнала при превышении первого порогового уровня и сигнала выключения для выключения генератора при превышении второго порогового уровня, причем первый пороговый уровень ниже второго порогового уровня. Достигается уменьшение риска операции при электрохирургическом вмешательстве посредством быстрого отключения генератора при обнаружении нежелательного перемещения пациента с предотвращением нежелательных отключений вследствие медленных или незначительных перемещений пациента, которые являются безвредными для результата операции, что позволяет избежать травмирования пациента. 10 з.п. ф-лы, 10 ил.
1. Хирургическое устройство для осуществления электрохирургического вмешательства на пациенте, содержащее:
- прибор (15), имеющий генератор (20) для генерации напряжения воздействия и управляющее устройство (23) для управления генератором (20),
- присоединяемый к генератору (20) инструмент (14), имеющий по меньшей мере один электрод (18) для воздействия напряжением на ткань пациента (11),
- датчик (27) движения для регистрации движения пациента, закрепляемый на пациенте (11) и соединяемый с управляющим устройством (23),
причем управляющее устройство (23) содержит устройство (26) оценки сигналов, выполненное с возможностью сравнения сигнала (S) от датчика (27) движения по меньшей мере с первым (sw) и вторым (sa) пороговыми уровнями для генерации предупредительного сигнала при превышении первого порогового уровня (sw) и сигнала выключения для выключения генератора (20) при превышении второго порогового уровня (sa), причем первый пороговый уровень (sw) ниже второго порогового уровня (sa).
2. Устройство по п. 1, отличающееся тем, что датчик (27) движения является датчиком ускорения.
3. Устройство по п. 1 или 2, отличающееся тем, что датчик (27) движения имеет крепежное устройство (32), посредством которого он является закрепляемым на конечности, прежде всего на стопе или на ноге пациента (11).
4. Устройство по п. 3, отличающееся тем, что крепежное устройство (32) является клейкой поверхностью или крепежной лентой.
5. Устройство по одному из предшествующих пунктов, отличающееся тем, что устройство (26) оценки сигналов выполнено с возможностью генерации сигнала выключения на протяжении заданного промежутка времени.
6. Устройство по п. 5, отличающееся тем, что промежуток времени является регулируемым.
7. Устройство по одному из предшествующих пунктов, отличающееся тем, что генератор (20) соединен с предусмотренным на инструменте (14) нейтральным электродом (19).
8. Устройство по одному из предшествующих пунктов, отличающееся тем, что генератор (20) соединен с нейтральным электродом (19), закрепляемым на пациенте (11).
9. Устройство по п. 8, отличающееся тем, что датчик (27) движения содержится в нейтральном электроде (19).
10. Устройство по одному из предшествующих пунктов, отличающееся тем, что управляющее устройство (23) имеет по меньшей мере один размещенный вне прибора (15) участок (33).
11. Устройство по п. 10, отличающееся тем, что размещенный вне прибора участок (33) содержит устройство (26) оценки сигналов.
| WO 2019068105 A1, 04.04.2019 | |||
| EP 3505120 A1, 03.07.2019 | |||
| DE 3238123 A1, 19.04.1984 | |||
| JP 2014523277 A, 11.09.2014 | |||
| US 2014303660 A1, 09.10.2014 | |||
| ИМПЕДАНСНЫЙ ЭЛЕКТРОХИРУРГИЧЕСКИЙ АППАРАТ | 2001 |
|
RU2204351C2 |

