Изобретение относится к медицине, а именно к нейрохирургии позвоночника, и представляет собой комплект инструментов для применения совместно с системой хирургической навигации, и может использоваться в оперативных вмешательствах в области нейрохирургии позвоночника. В комплект инструментов для нейрохирургии позвоночника входят:
- шило №1;
- шило №2;
- шило №3;
- шило для установки базисной системы сфер;
- крепление для позвоночника (прищепка);
- система сфер для крепления к позвоночнику из сплава алюминия.
Известны зарубежные аналоги:
- навигируемые инструменты для спинальной хирургии, входящие в состав инструментария системы навигационной хирургической Stryker NAV3 (РЗН 2017/5659 от 06.04.2023);
- инструменты для спинальной и травматологической навигации, входящие в состав инструментария системы навигационной хирургической Brainlab (ФСЗ 2012/12520 от 13.11.2017);
- инструменты для спинальной хирургии, входящие в состав инструментария системы навигационной хирургической StealthStation S8 (РЗН 2019/8291 от 27.08.2021.
Недостатком инструментов, приведенных выше, является невозможность их использования с отечественной системой хирургической навигации «Автоплан».
Целью изобретения является расширение ассортимента инструментария, применяемого для нейрохирургии позвоночника совместно с отечественной хирургической навигационной системой «Автоплан».
Новизна конструкции заключается в совместимости с отечественной системой хирургической навигации «Автоплан» (РЗН 2023/19330 от 12.01.2023) (далее «Автоплан»).
Конструкция инструментов, входящих в состав комплекта поясняется графическими материалами
Инструменты для нейрохирургии позвоночника используются во время операций на позвоночнике для манипулирования и стабилизации позвоночника.
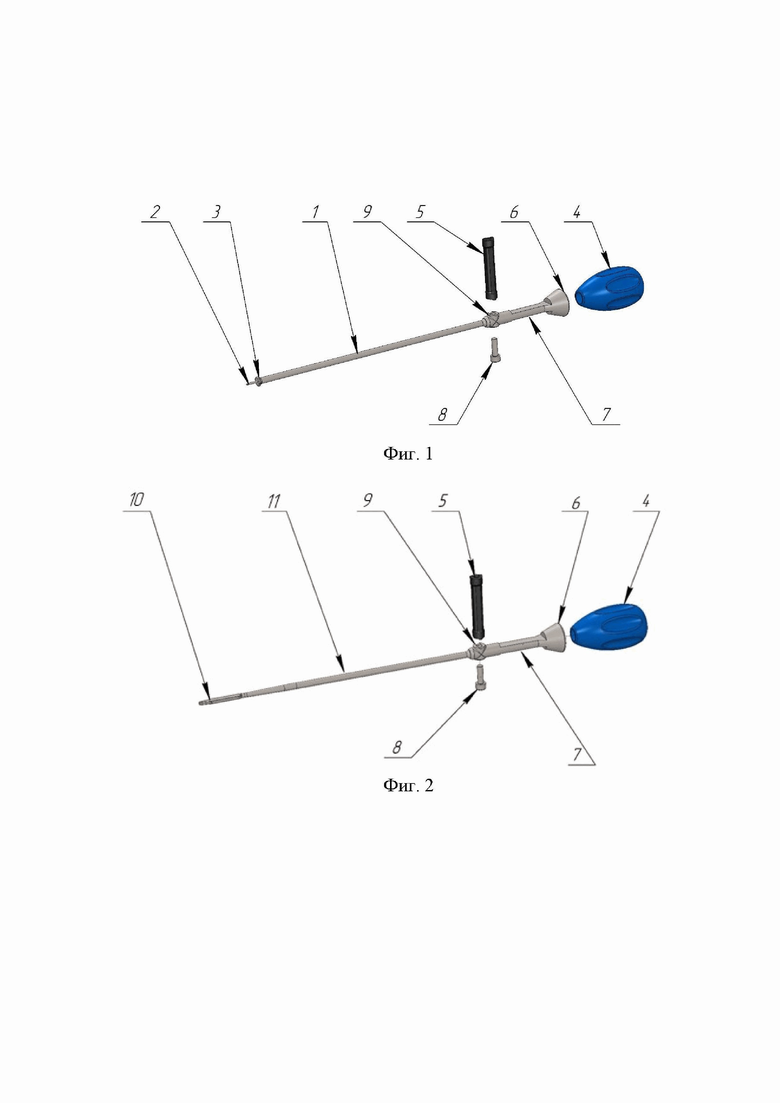
Конструкция шила №1 поясняется графическим материалом (фиг. 1), где обозначено: 1 - рабочая часть, 2 - острый трёхгранный наконечник, 3 - ограничитель погружения, 4 - рукоять, 5 - съемный кронштейн для крепления инструментальной системы сфер, 6 - ударная поверхность, 7 - основание ручки, 8 - винт, 9 - место установки съёмного кронштейна.
Шило №1 выполнено в виде стилета и состоит из стержня, который имеет рабочую часть (1) и основание ручки (7) для крепления рукояти (4). Рабочая часть (1) имеет прямую цилиндрической форму, что обеспечивает использование инструмента с направляющей для спинальной нейрохирургии. Нижний конец рабочей части (1) выполнен в виде острого трёхгранного наконечника (2) с ограничителем погружения инструмента (3). Ограничитель расположен на расстоянии 10 мм от наконечника (2). Торцевая часть основания ручки (7) выполнена в виде ударной поверхности (6) для передачи на стилет значительного усилия хирургическим молотком.
На дистальном конце рабочей части (1) предусмотрено место установки (9) съемного кронштейна (5) для крепления инструментальной системы сфер в одном положении. Кронштейн (5) имеет 1 паз, ответная часть для которого расположена на дистальном конце рабочей части (1), и резьбовое отверстие, что позволяет фиксировать взаимное положение кронштейна с его ответной частью с помощью винта (8).
Рукоять (4) неподвижно соединена с основанием ручки (7), имеет 6 подпальцевых выемок для удобства захвата и удержания хирургом.
Шило №1 предназначено для вскрытия педикулярного канала в ходе операции под контролем системы навигации «Автоплан».
Интеграция к шилу №1 инструментальной системы сфер позволяет использовать инструмент совместно с отечественной хирургической навигационной системой «Автоплан» с возможностью идентификации структуры за счет сопоставления нахождения кончика навигируемого инструмента с соответствующей структурой на проекциях функционального исследования пациента.
Конструкция шила №2 поясняется графическим материалом (фиг. 2), где обозначено: 11 - рабочая часть, 10 - плоский наконечник треугольной формы, 4 - рукоять, 5 - съемный кронштейн для крепления инструментальной системы сфер, 6 - ударная поверхность, 7 - основание ручки, 8 - винт, 9 - место установки съёмного кронштейна
Шило №2 выполнено в виде стилета и состоит из стержня, который имеет рабочую часть (11) и основание ручки (7) для крепления рукояти (4). Рабочая часть имеет прямую коническую форму, что обеспечивает использование инструмента с направляющей для спинальной нейрохирургии. Нижний конец рабочей части (11) выполнен в виде плоского наконечника треугольной формы (10). Торцевая часть основания ручки (7) выполнена в виде ударной поверхности (6) для передачи на стилет значительного усилия хирургическим молотком.
На дистальном конце рабочей части (11) предусмотрено место установки (9) съемного кронштейна (5) для крепления инструментальной системы сфер в одном положении. Кронштейн (5) имеет 1 паз, ответная часть для которого расположена на дистальном конце рабочей части (11), и резьбовое отверстие, что позволяет фиксировать взаимное положение кронштейна с его ответной частью с помощью винта (8).
Рукоять (4) неподвижно соединена с основанием ручки (7), имеет 6 подпальцевых выемок для удобства захвата и удержания хирургом.
Шило №2 предназначено для перфорации и внедрения в костные структуры в ходе операции под контролем системы навигации «Автоплан».
Интеграция к шилу №2 инструментальной системы сфер позволяет использовать инструмент совместно с отечественной хирургической навигационной системой «Автоплан» с возможностью идентификации структуры за счет сопоставления нахождения кончика навигируемого инструмента с соответствующей структурой на проекциях функционального исследования пациента.
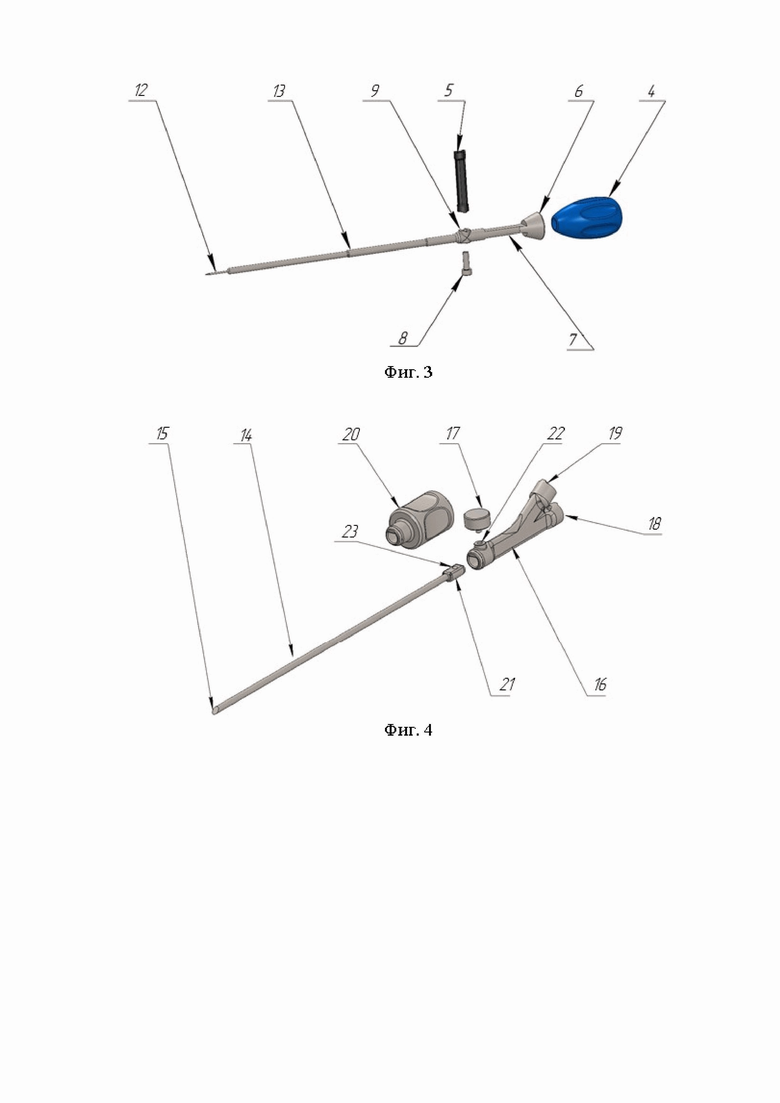
Конструкция шила №3 поясняется графическим материалом (фиг. 3), где обозначено: 13 - рабочая часть, 12 - острый трёхгранный наконечник, 4 - рукоять, 5 - съемный кронштейн для крепления инструментальной системы сфер, 6 - ударная поверхность, 7 - основание ручки, 8 - винт, 9 - место установки съёмного кронштейна.
Шило №3 выполнено в виде стилета и состоит из стержня, который имеет рабочую часть (13) и основание ручки (7) для крепления рукояти (4). Рабочая часть (13) имеет прямую цилиндрической форму с переходным диаметром, что обеспечивает использование инструмента с направляющей для спинальной нейрохирургии. Нижний конец рабочей части (13) выполнен в виде острого трёхгранного наконечника (12). Торцевая часть основания ручки (7) выполнена в виде ударной поверхности (6) для передачи на стилет значительного усилия хирургическим молотком.
На дистальном конце рабочей части (13) предусмотрено место установки (9) съемного кронштейна (5) для крепления инструментальной системы сфер в одном положении. Кронштейн (5) имеет 1 паз, ответная часть для которого расположена на дистальном конце рабочей части (13), и резьбовое отверстие, что позволяет фиксировать взаимное положение кронштейна с его ответной частью с помощью винта (8).
Рукоять (4) неподвижно соединена с основанием ручки (7), имеет 6 подпальцевых выемок для удобства захвата и удержания хирургом.
Шило №3 предназначено для вскрытия и углубления педикулярного канала в ходе операции под контролем системы навигации «Автоплан».
Интеграция к шилу №3 инструментальной системы сфер позволяет использовать инструмент совместно с отечественной хирургической навигационной системой «Автоплан» с возможностью идентификации структуры за счет сопоставления нахождения кончика навигируемого инструмента с соответствующей структурой на проекциях функционального исследования пациента.
Конструкция шила для установки базисной системы сфер поясняется графическим материалом (фиг. 4), где обозначено: 14 - рабочая часть, 15 -острый наконечник, 16 - съемная рукоять, 17 - винт, 18 - держатель инструментальной системы сфер под углом 90°, 19 - держатель инструментальной системы сфер под углом 30°, 20 - съемная наковальня, 21 - основание ручки, 22 - отверстие с резьбой, 23 - засверловка.
Шило для установки базисной системы сфер выполнено в виде стилета и состоит из съемной рукояти (16), съемной наковальни (20) и стержня, который имеет рабочую часть прямой цилиндрической формы (14) и основание ручки (21) для установки съемной рукояти (16) и съемной наковальни (20). Рабочая часть имеет прямую цилиндрическую форму.
Нижний конец рабочей части (14) выполнен в виде острого наконечника (15). Сплющенное с одной стороны основание ручки (21) обеспечивает его установку в гнездо съёмной рукояти (16) и съемной наковальни (20) без возможности поворота рукояти (16) и наковальни (20) вокруг рабочей части. Глубина гнезда съёмной рукояти (16) и съёмной наковальни (20) достаточная для надежной фиксации иглы, исключает ее излом в процессе оперативного приема. На основании ручки (21) имеется засверловка (23), на съёмной рукояти (16) имеется отверстие с резьбой (22), что позволяет фиксировать основание ручки (21) в гнезде съемной рукояти (16) с помощью винта (17), обеспечивая точное позиционирование инструментальной системы сфер.
На дистальном конце съёмной рукояти (16) имеется два держателя для крепления инструментальной системы сфер. Держатель (18) обеспечивает установку базисной системы сфер под углом 90°. Держатель (19) обеспечивает установку базисной системы сфер под углом 30°.
Съёмная наковальня (20) имеет 4 подпальцевых выемки для удобства захвата и удержания хирургом во время оперативного приема и ударную поверхность для передачи на стилет значительного усилия хирургическим молотком.
Шило для установки базисной системы сфер предназначено для жесткой фиксации базисной системы сфер в позвоночную структуру в ходе операции под контролем системы навигации «Автоплан».
Интеграция к шилу базисной системы сфер позволяет использовать инструмент совместно с отечественной хирургической навигационной системой «Автоплан» с возможностью жесткой фиксации базисной системы сфер относительно позвоночника путем перфорации кости.
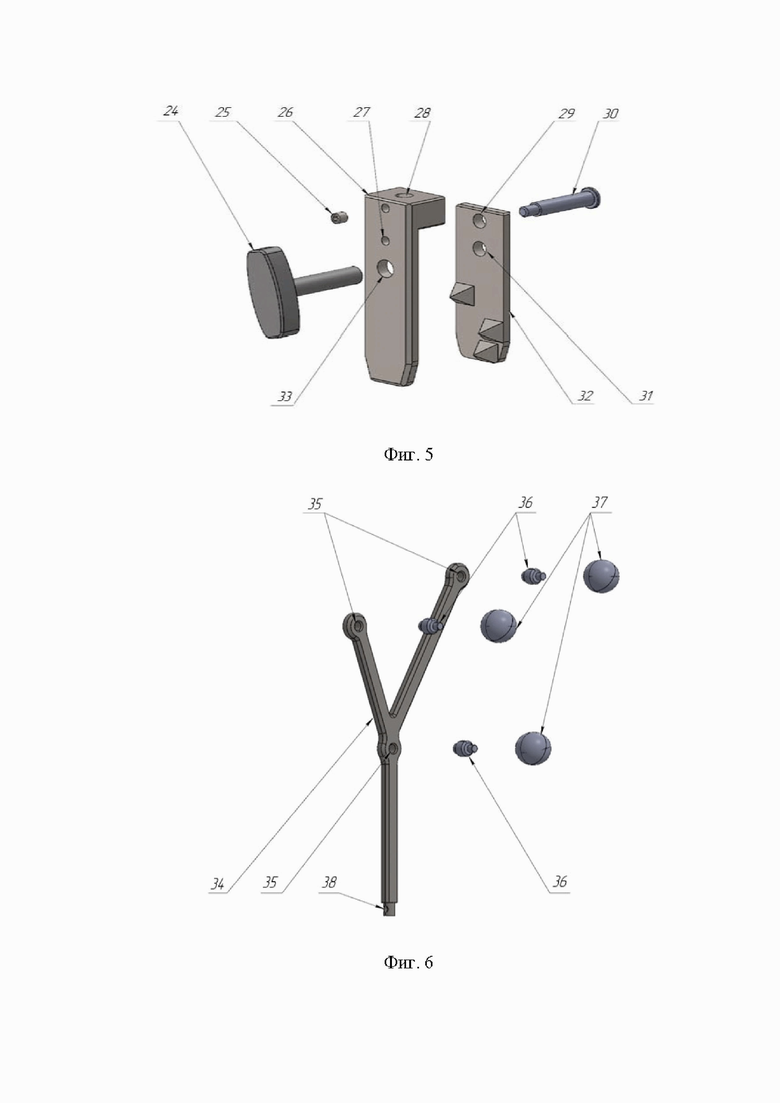
Конструкция крепления для позвоночника (прищепка) поясняется графическим материалом (фиг. 5), где обозначено: 26 - пластина неподвижная с зубьями, 32 - пластина подвижная с зубьями, 30 - съемная направляющая, 24 - съемный винт, 28 - глухое отверстие для установки инструментальной системы сфер для крепления к позвоночнику (прищепке), 33 - сквозное отверстие для винта, 31 - сквозное отверстие для винта с резьбой, 29 - сквозное отверстие для направляющей, 27 - сквозное отверстие для направляющей с резьбой, 25 - винт для крепления системы сфер.
Крепление для позвоночника (прищепка) выполнено в виде двух симметричных пластин (26) и (32) с зубьями. Пластина (26) имеет Г-образную форму и является неподвижной. Пластины соединяются между собой с помощью съемной направляющей (30) и съемного винта (24).
Сверху на пластине (26) выполнено глухое отверстие для установки инструментальной системы сфер для крепления к позвоночнику (28), которая фиксируется с помощью винта (25).
При установке крепления к позвоночнику направляющую (30) проводят через сквозное отверстие (29) пластины (32) и ввинчивают в отверстие с резьбой (27) пластины (26). Винт (24) проводят через сквозное отверстие (33) пластины (26) и ввинчивают в отверстие с резьбой (31) пластины (32).
При завинчивании винта (24) пластины сближаются, зубья плотно внедряются в остистый отросток позвонка, что обеспечивает устойчивое положение системы сфер в пространстве.
Крепление для позвоночника (прищепка) предназначено для жесткой фиксации базисной системы сфер на остистом отростке позвонка в ходе операции под контролем системы навигации «Автоплан».
Интеграция к креплению для позвоночника (прищепке) системы сфер позволяет использовать инструмент совместно с отечественной хирургической навигационной системой «Автоплан».
Конструкция системы сфер для крепления к позвоночнику из сплава алюминия поясняется графическим материалом (фиг. 6), где обозначено: 34 - площадка У-образной формы, 35 - отверстия с резьбой, 36 - шпильки, 37 - сферы, 38 - засверловка.
Система сфер для крепления к позвоночнику выполнена из площадки У-образной формы (34), на которой имеются 3 отверстия с резьбой под установку шпилек (36). Шпильки представляют собой стержень с неполной двусторонней резьбой, один наконечник которого с шагом резьбы М4х0,7 самостоятельно ввинчивается в отверстие (35) площадки (34), второй наконечник с шагом резьбы М3х0,5 предназначен для установки сфер (37). Каждая сфера (37) имеет глухое отверстие с соответствующей резьбой, что позволяет установить ее на свободный наконечник шпильки путем завинчивания по резьбе. На нижней части площадки имеется засверловка (38) для фиксации системы сфер в креплении для позвоночника (прищепке) с помощью винта, входящего в состав крепления для позвоночника.
Система сфер для крепления к позвоночнику из сплава алюминия предназначена для отслеживания положения оперируемого отдела позвоночника относительно навигированного инструмента хирурга на протяжении всего периода оперативного вмешательства с использование системы навигации «Автоплан».
Ниже приведены клинические примеры с использованием заявленного комплекта инструментов.
Пример 1. Пациент Т., 61 год, с диагнозом: спондилолистез LV позвонка, дегенеративный стеноз позвоночного канала на уровне LIV-LV позвонков. Было проведено хирургическое вмешательство: микрохирургическая декомпрессия позвоночного канала на уровне LIV-LV позвонков, транспедикулярная стабилизация на уровне LIV-LV позвонков с применением системы хирургической навигационной «Автоплан».
В предоперационном периоде была выполнена компьютерная томография (КТ) позвоночника пациента. Результаты были загружены в ПО «Автоплан», построена 3D-модели зоны интереса. На 3D-модели было выполнено планирование установки выбранных фиксаторов по необходимой траектории.
В операционном периоде выполнили хирургический разрез на уровне L3 для доступа к остистому отростку позвонка и установили на остистом отростке в фиксированном положении крепление для позвоночника (прищепку) с базисной системой сфер (базисом) с учетом расположения детектирующей стереокамеры АПК «Автоплан» для корректного отслеживания базиса весь операционный период.
На этапе перфорации кортикального слоя для «разметки» доступа, выбора корректного направления и угла помещения будущего фиксатора использовали шило №1 (с ограничителем погружения инструмента на расстоянии 10 мм от кончика). Для формирования канала в педикуле и теле оперируемого позвонка использовали шило №2. Для углубления канала использовали шило №3. Шило №2 использовалось как основное для навигирования, что обеспечило защиту от попадания в спинальный канал.
Интраоперационно под контролем хирургической навигационной системы «Автоплан» выполнили операцию по транскутанной стабилизации одного сегмента пояснично-крестцового отдела с установкой транспедикулярного винта. Интраоперационно при проведении оперативного вмешательства осложнений не было.
Пациент находился под контролем в течение 4 дней, постоперационных осложнений не выявлено.
Пример 2. Пациент, М. 45 лет с диагнозом: новообразование (гемангиома) в теле L5 позвонка.
Показания к удалению гемангиомы с проведением вертебропластики позвонка L5 с транспедикулярным доступом под контролем хирургической навигационной системы «Автоплан» обусловлены клиническими показаниями (болевой синдром) и угрозой патологического перелома.
В предоперационном периоде пациенту была выполнена компьютерная томография (КТ) зоны интереса. Результаты были загружены в ПО «Автоплан», построена персонифицированная модель позвоночника. На 3D-модели было выполнено планирование траектории введения инструмента в тело позвонка.
В операционном периоде был выполнен хирургический доступ в подвздошной кости для установки шила с базисной системой сфер. Шило для установки базисной системы сфер установлено неподвижно в фиксированном положении. Предварительная усадка системы сфер на инструмент - в зоне детекции стереокамеры АПК «Автоплан» для корректного отслеживания базиса весь операционный период.
В операционной выполнена регистрация пациента с его персонифицированной моделью в ПО «Автоплан».
Далее с помощью заранее откалиброванного рабочего инструмента (канюлированной иглы для вертебропластики) произведена разметка разрезов. Калибровочное устройство для инструмента оснащено системой отражающих сфер, позволяющим зарегистрировать положение инструмента в пространстве и получить его визуализацию хорошей степени точности в реальном времени.
Под контролем хирургической навигации была выполнена операция по вертебропластике с введением композитного материал на основе полиметилметакрилата при помощи специальной иглы, с учетом корректировки нужного направления и угла введения по виртуальному отображению в системе хирургической навигации.
Проведено контрольное КТ - сканирование после операции.
На послеоперационных КТ-снимках выявили тотальное заполнение костным цементом опухолевого дефекта позвонка, миграции полиметилметакрилата не было. Пациентку выписали на 2-и сутки после хирургического вмешательства. КТ-контроль осуществляли через 6 и 12 месяцев, при этом было подтверждено отсутствие рецидива опухоли.
Учитывая положительный опыт использования изобретения, комплект инструментов для нейрохирургии позвоночника может применяться с системой хирургической навигации «Автоплан» при открытых хирургических вмешательствах на позвоночнике.
| название | год | авторы | номер документа |
|---|---|---|---|
| Комплект инструментов для хирургии для применения с системой хирургической навигации | 2023 |
|
RU2823110C1 |
| Способ регистрации пациента с его персонифицированной моделью в программном обеспечении хирургической навигационной системы при помощи рентгеновских изображений с использованием калибрующего устройства | 2023 |
|
RU2824966C1 |
| Ультразвуковое педикулярное шило (2 варианта) | 2017 |
|
RU2674243C1 |
| Педикулярное шило | 2017 |
|
RU2674230C1 |
| КОННЕКТОР ФИКСАЦИИ ТРЕКЕРОВ ДЛЯ НЕЙРОНАВИГАЦИИ | 2018 |
|
RU2690103C1 |
| Набор инструментов для проведения транспедикулярной фиксации позвоночника с моделированием стержней и фиксацией транспедикулярных и стопорных винтов | 2023 |
|
RU2808116C1 |
| УСТРОЙСТВО ДЛЯ ЧРЕСКОЖНОГО УДАЛЕНИЯ ГРЫЖ МЕЖПОЗВОНКОВЫХ ДИСКОВ ШЕЙНОГО ОТДЕЛА ПОЗВОНОЧНИКА С ЭНДОСКОПИЧЕСКОЙ АССИСТЕНЦИЕЙ | 2022 |
|
RU2790945C1 |
| СПОСОБ ВВЕДЕНИЯ ТРАНСПЕДИКУЛЯРНЫХ ВИНТОВ В ГРУДНОМ И ПОЯСНИЧНОМ ОТДЕЛАХ ПОЗВОНОЧНИКА | 2020 |
|
RU2747071C1 |
| ЭКСПЕРТНАЯ СИСТЕМА НА БАЗЕ МЕДИЦИНСКОГО МАНИПУЛЯЦИОННОГО РОБОТА ДЛЯ ТРАНСПЕДИКУЛЯРНОЙ ФИКСАЦИИ ПОЗВОНОЧНИКА | 2023 |
|
RU2833780C1 |
| Устройство для монтажа полотна натяжного потолка. | 2024 |
|
RU2838308C1 |
Изобретение относится к медицинской технике, а именно к комплекту инструментов для нейрохирургии позвоночника под контролем системы хирургической навигации. Комплект инструментов для нейрохирургии позвоночника под контролем системы хирургической навигации содержит шило для вскрытия педикулярного канала, шило для перфорации и внедрения в костные структуры, шило для углубления педикулярного канала, шило для установки базисной системы сфер, крепление для позвоночника и систему сфер для крепления к позвоночнику. Шило для вскрытия педикулярного канала выполнено в виде стилета и включает стержень прямой цилиндрической формы, который имеет рабочую часть с острым трёхгранным наконечником и ограничителем погружения и основание ручки с ударной поверхностью в торцевой части, неподвижно присоединенную рукоять с шестью подпальцевыми выемками и съемный кронштейн для крепления инструментальной системы сфер, который имеет паз и резьбовое отверстие для винта. Шило для перфорации и внедрения в костные структуры выполнено в виде стилета и включает стержень прямой конической формы, который имеет рабочую часть с плоским наконечником треугольной формы и основание ручки с ударной поверхностью в торцевой части, неподвижно присоединенную рукоять с шестью подпальцевыми выемками и съемный кронштейн для крепления инструментальной системы сфер, который имеет паз и резьбовое отверстие для винта. Шило для углубления педикулярного канала выполнено в виде стилета и включает стержень прямой цилиндрической формы с переходным диаметром, который имеет рабочую часть с острым трёхгранным наконечником и основание ручки с ударной поверхностью в торцевой части, неподвижно присоединенную рукоять с шестью подпальцевыми выемками и съемный кронштейн для крепления инструментальной системы сфер, который имеет паз и резьбовое отверстие для винта. Шило для установки базисной системы сфер выполнено в виде стилета и включает стержень прямой цилиндрической формы, который имеет рабочую часть с острым трёхгранным наконечником и сплющенное с одной стороны основание ручки для установки и фиксации рукояти и наковальни, съемную рукоять, в которой выполнены гнездо для установки стержня с фиксацией с помощью винта и два держателя для установки базисной системы сфер под углом 90° и 30°, и съёмную наковальню с гнездом под основание ручки для выполнения оперативного приема. Крепление для позвоночника в виде прищепки содержит две симметричные пластины с зубьями, одна из которых выполнена Г-образной формы, имеет глухое отверстие и винт для установки системы сфер и является неподвижной, и элементы крепления, проведенные через отверстия пластин, обеспечивающие соединение пластин между собой. Система сфер для крепления к позвоночнику из сплава алюминия выполнена в виде площадки У-образной формы, с тремя установленными сферами, закрепленными резьбовым соединением с помощью шпилек с неполной двусторонней резьбой, и позиционирующей засверловкой на нижней части площадки для фиксации системы сфер в креплении для позвоночника. Использование изобретения позволяет обеспечить манипулирование и стабилизацию позвоночника во время операций. 6 ил.
Комплект инструментов для нейрохирургии позвоночника под контролем системы хирургической навигации, содержащий: шило для вскрытия педикулярного канала, выполненное в виде стилета и включающее стержень прямой цилиндрической формы, который имеет рабочую часть с острым трёхгранным наконечником и ограничителем погружения и основание ручки с ударной поверхностью в торцевой части, неподвижно присоединенную рукоять с шестью подпальцевыми выемками и съемный кронштейн для крепления инструментальной системы сфер, который имеет паз и резьбовое отверстие для винта; шило для перфорации и внедрения в костные структуры, выполненное в виде стилета и включающее стержень прямой конической формы, который имеет рабочую часть с плоским наконечником треугольной формы и основание ручки с ударной поверхностью в торцевой части, неподвижно присоединенную рукоять с шестью подпальцевыми выемками и съемный кронштейн для крепления инструментальной системы сфер, который имеет паз и резьбовое отверстие для винта; шило для углубления педикулярного канала, выполненное в виде стилета и включающее стержень прямой цилиндрической формы с переходным диаметром, который имеет рабочую часть с острым трёхгранным наконечником и основание ручки с ударной поверхностью в торцевой части, неподвижно присоединенную рукоять с шестью подпальцевыми выемками и съемный кронштейн для крепления инструментальной системы сфер, который имеет паз и резьбовое отверстие для винта; шило для установки базисной системы сфер, выполненное в виде стилета и включающее стержень прямой цилиндрической формы, который имеет рабочую часть с острым трёхгранным наконечником и сплющенное с одной стороны основание ручки для установки и фиксации рукояти и наковальни, съемную рукоять, в которой выполнены гнездо для установки стержня с фиксацией с помощью винта и два держателя для установки базисной системы сфер под углом 90° и 30°, и съёмную наковальню с гнездом под основание ручки для выполнения оперативного приема; крепление для позвоночника в виде прищепки, содержащее две симметричные пластины с зубьями, одна из которых выполнена Г-образной формы, имеет глухое отверстие и винт для установки системы сфер и является неподвижной, и элементы крепления, проведенные через отверстия пластин, обеспечивающие соединение пластин между собой; систему сфер для крепления к позвоночнику из сплава алюминия, выполненную в виде площадки У-образной формы, с тремя установленными сферами, закрепленными резьбовым соединением с помощью шпилек с неполной двусторонней резьбой, и позиционирующей засверловкой на нижней части площадки для фиксации системы сфер в креплении для позвоночника.
| CN 219230110 U, 23.06.2023 | |||
| Способ установки протеза межпозвонкового диска с использованием аппарата для нейронавигации | 2022 |
|
RU2785030C1 |
| Способ подготовки и выполнения хирургической операции с использованием дополненной реальности и комплекс оборудования для её осуществления | 2019 |
|
RU2707369C1 |
| WO 9926549 A1, 03.06.1999. | |||

