Изобретение относится к медицине, а именно к нейрохирургии, и представляет собой комплект инструментов для применения совместно с системой хирургической навигации, обеспечивающий навигацию при проведении оперативных вмешательств в области нейрохирургии, эндокринологии, травматологии, оториноларингологии и ортопедии.
В комплект входят:
- Указка навигационная общего назначения;
- Указка навигационная укороченная;
- Указка навигационная укороченная с наклоном кончика;
- Мачта;
- Калибратор;
- Универсальное крепление из сплава алюминия;
- Базисная система сфер;
- Инструментальная система сфер №1;
- Инструментальная система сфер №2;
- Инструментальная система сфер №3;
- Инструментальная система сфер №4;
- Инструментальная система сфер №5;
- Площадка управления.
Известны зарубежные аналоги:
- навигируемые инструменты, входящие в состав инструментария системы навигационной хирургической Stryker NAV3 (РЗН 2017/5659 от 06.04.2023);
- навигируемые инструменты, входящие в состав инструментария системы навигационной хирургической Brainlab (ФСЗ 2012/12520 от 13.11.2017);
- навигируемые инструменты, входящие в состав инструментария системы навигационной хирургической StealthStation S8 (РЗН 2019/8291 от 27.08.2021).
Целью изобретения является расширение ассортимента инструментария, применяемого в областях нейрохирургии, эндокринологии, травматологии, ортопедии, а также при оториноларингологических вмешательствах совместно с отечественной хирургической навигационной системой «Автоплан».
Новизна конструкции заключается в совместимости с отечественной системой хирургической навигации «Автоплан» (РЗН 2023/19330 от 12.01.2023) (далее «Автоплан»).
Конструкция инструментов, входящих в состав комплекта поясняется графическими материалами.
Цель достигается тем, что световозвращающие сферы расположены на заданных расстояниях друг относительно друга и формируют уникальные конфигурации систем сфер, которые детектируется АПК «Автоплан» посредством оптического трекинга. Программное распознавание конфигурации системы сфер обеспечивает навигацию инструмента.
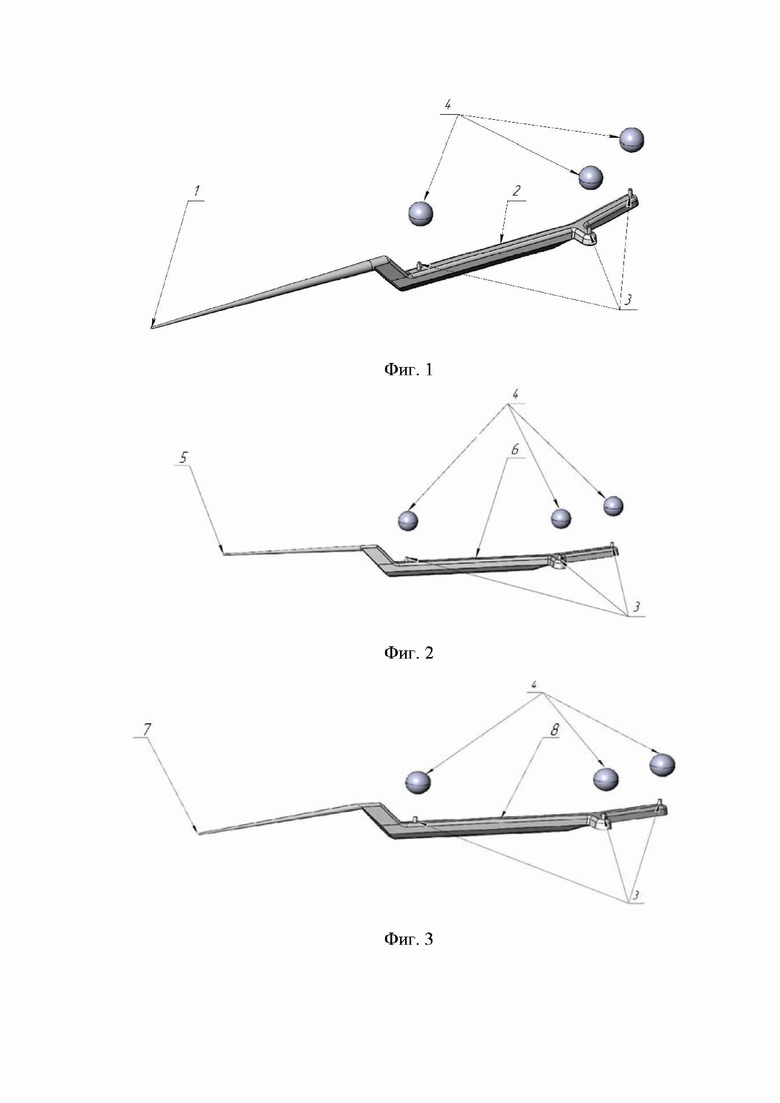
Конструкция указки навигационной общего назначения поясняется графическим материалом (фиг. 1), где обозначено: 1 - кончик указки, 2 - рукоять, 3 - шпильки для установки сфер, 4 - сферы.
Указка навигационная общего назначения представляет собой неразборный инструмент с конусообразным кончиком (1) длиной 17 см и рукоятью (2), на которой неподвижно установлены три шпильки (3), с шагом резьбы М3×0,5, предназначенные для установки сфер (4). Каждая сфера (4) имеет глухое отверстие с соответствующей резьбой, что позволяет установить ее на шпильку (3) путем завинчивания по резьбе. Взаимное расположение сфер (4) на рукояти (2) указки формирует уникальную конфигурацию системы сфер, что позволяет ПО «Автоплан» программно распознавать детектируемый оптическим трекингом инструмент.
Указка навигационная общего назначения предназначена для проведения регистрации, выявления областей интереса хирурга и контроля работы с навигацией в ходе операции под контролем системы навигации «Автоплан».
Конструкция указки навигационной укороченной поясняется графическим материалом (фиг. 2), где обозначено: 5 - кончик указки, 6 - рукоять, 3 - шпильки для установки сфер, 4 - сферы.
Указка навигационная укороченная представляет собой неразборный инструмент с конусообразным кончиком (5) длиной 12 см и рукоятью (6), на которой неподвижно установлены три шпильки (3), с шагом резьбы М3×0,5, предназначенные для установки сфер (4). Каждая сфера (4) имеет глухое отверстие с соответствующей резьбой, что позволяет установить ее на шпильку (3) путем завинчивания по резьбе. Взаимное расположение сфер (4) на рукояти (6) указки формирует уникальную конфигурацию системы сфер, что позволяет ПО «Автоплан» программно распознавать детектируемый оптическим трекингом инструмент.
Указка навигационная укороченная предназначена для проведения регистрации, выявления областей интереса хирурга и контроля работы с навигацией в ходе операции под контролем системы навигации «Автоплан».
Конструкция указки навигационной укороченной с наклоном кончика поясняется графическим материалом (фиг. 3), где обозначено: 7 - кончик указки, 8 - рукоять, 3 - шпильки для установки сфер, 4 - сферы.
Указка навигационная укороченная с наклоном кончика представляет собой неразборный инструмент с изогнутым на 7 градусов конусообразным кончиком (7) длиной 12 см и рукоятью (8), на которой неподвижно установлены три шпильки (3), с шагом резьбы М3×0,5, предназначенные для установки сфер (4). Каждая сфера (4) имеет глухое отверстие с соответствующей резьбой, что позволяет установить ее на шпильку (3) путем завинчивания по резьбе. Взаимное расположение сфер (4) на рукояти (8) указки формирует уникальную конфигурацию системы сфер, что позволяет ПО «Автоплан» программно распознавать детектируемый оптическим трекингом инструмент.
Указка навигационная укороченная с наклоном кончика предназначена для проведения регистрации, выявления областей интереса хирурга и контроля работы с навигацией в ходе операции под контролем системы навигации «Автоплан».
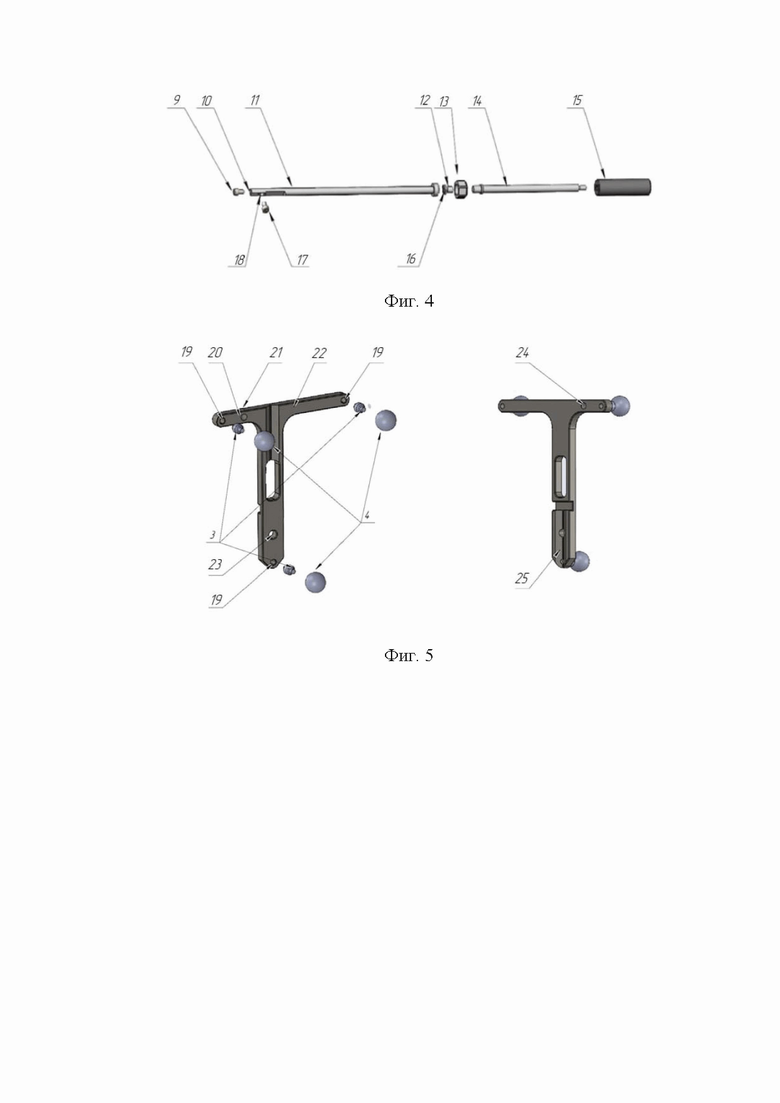
Конструкция мачты поясняется графическим материалом (фиг. 4), где обозначено: 11 - вершина (топ) мачты, 14 - средняя часть мачты, 12 - винт для фиксации соединительной гайки, 13 - соединительная гайка, 15 - основание, 18 - отверстие для крепления инструментария в параллельной плоскости, 17 - винт для крепления инструментария в параллельной плоскости, 10 - отверстие для крепления инструментария в перпендикулярной плоскости, 9 - винт для крепления инструментария в перпендикулярной плоскости, 16 - паз для фиксации положения топ мачты.
Мачта представляет собой разборный инструмент, состоящий из основания мачты (15), средней части (14) и вершины (топ) мачты (11). Основание мачты (15) является утолщенной - диаметр 15 мм, устанавливается в зажим хирургического стола. Средняя часть мачты (14) вкручивается в основание мачты (15). Вершина мачты (11) соединяется со средней частью (14) с помощью соединительной гайки (13), которая крепится винтом (12) к основанию (15) и накручивается на вершину мачты. На винте для фиксации соединительной гайки (12) имеется паз для установки вершины мачты в фиксированном положении. В зависимости от своей формы и конструкции инструментарий устанавливается на вершине мачты (11) как в параллельной плоскости с помощью винта (17) и отверстия (18), так и в перпендикулярной плоскости с помощью винта (9) и отверстия (10).
Мачта предназначена для установки инструментария в зажим хирургического стола.
Конструкция калибратора поясняется графическим материалом (фиг. 5), где обозначено: 22 - площадка Т-образной формы, 19 - отверстия для установки шпилек, 3 - шпильки для установки сфер, 4 - сферы, 21 - верхняя лунка, 20 - передняя лунка, 27 - задняя лунка, 25 - паз для установки на мачте, 23 - отверстие для фиксации к мачте.
Калибратор представляет собой площадку Т-образной формы с тремя отверстиями для установки шпилек (19). Шпильки для установки сфер (3) выполнены в виде стержня, один наконечник которого неподвижно установлен в отверстия для установки шпилек (19), второй наконечник с шагом резьбы М3×0,5 предназначен для установки сфер (4). Каждая сфера (4) имеет глухое отверстие с соответствующей резьбой, что позволяет установить ее на свободный наконечник шпильки (3) путем завинчивания по резьбе. В верхней части инструмента имеются верхняя лунка (21), передняя лунка (20) и задняя лунка (24) для проведения калибровки хирургического инструмента. На задней стороне имеется паз для установки (25) калибратора к мачте и отверстие (23) для крепления с помощью винта. Взаимное расположение сфер (4) на инструменте формирует уникальную конфигурацию системы сфер, что позволяет ПО «Автоплан» программно распознавать детектируемый оптическим трекингом инструмент.
Калибратор предназначен для калибровки хирургических инструментов, а также для проверки указок навигационных.
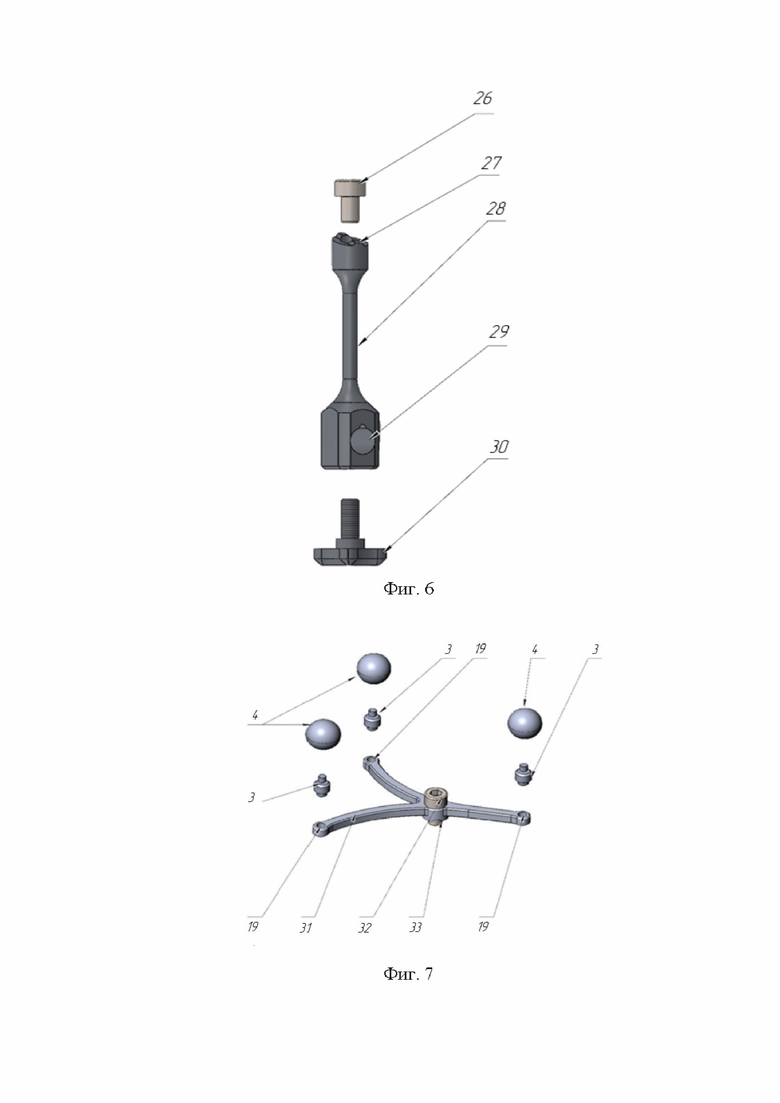
Конструкция универсального крепления из сплава алюминия поясняется графическим материалом (фиг. 6), где обозначено: 28 - крепление прямой формы, 27 - паз для установки инструментальной системы сфер, 29 - отверстие для установки хирургического инструмента, 30 - винт для фиксации хирургического инструмента, 26 - винт для крепления инструментальной системы сфер.
Универсальное крепление из сплава алюминия представляет собой крепление прямой формы (28). С одной стороны крепления имеется паз (27) для установки инструментальной системы сфер, которая крепится с помощью винта (26). На противоположной стороне крепления имеется отверстие для установки хирургического инструмента (29). После установки хирургический инструмент фиксируется с помощью винта (30).
Универсальное крепление из сплава алюминия предназначено для крепления инструментальной системы сфер на рабочем инструменте хирурга.
Конструкция базисной системы сфер поясняется графическим материалом (фиг. 7), где обозначено: 31 - площадка для крепления сфер, 19 - отверстия под установку шпилек, 3 - шпильки для установки сфер, 4 - сферы, 32 - невыпадающий винт, 33 - паз.
Базисная система сфер выполнена в виде площадки (31) на которой имеются 3 отверстия (19) под установку шпилек (3). Шпильки представляют собой стержень, один наконечник которого неподвижно устанавливается в отверстие (19) площадки (31), второй наконечник с шагом резьбы М3×0,5 предназначен для установки сфер (4). Каждая сфера (4) имеет глухое отверстие с соответствующей резьбой, что позволяет установить ее на свободный наконечник шпильки путем завинчивания по резьбе. В центре площадки (31) установлен невыпадающий винт (32) и выполнен паз (33) для крепления базисной системы сфер на инструментарий. Взаимное расположение сфер (4) формирует уникальную конфигурацию системы сфер, что позволяет ПО «Автоплан» программно распознавать детектируемый оптическим трекингом инструмент.
Базисная система сфер предназначена для проведения регистрации и обеспечения последующей навигации в ходе операции под контролем системы навигации «Автоплан».
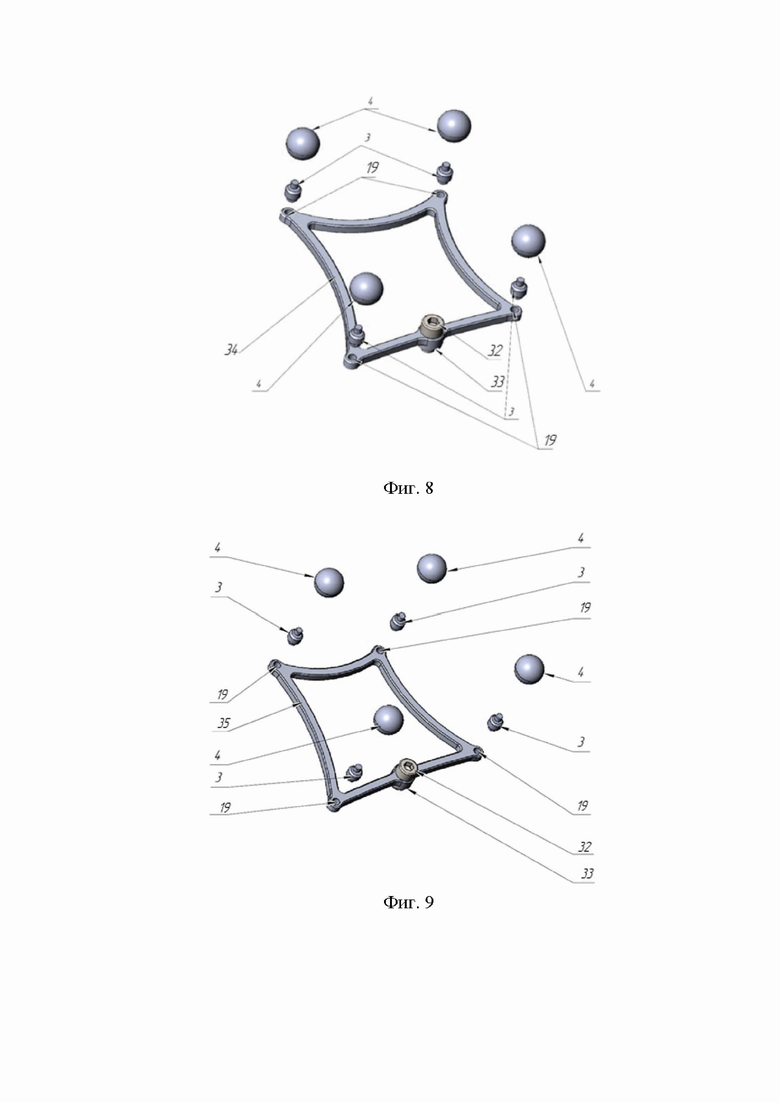
Конструкция инструментальной системы сфер №1 поясняется графическим материалом (фиг. 8), где обозначено: 34 - площадка для крепления сфер, 19 - отверстия под установку шпилек, 3 - шпильки, 4 - сферы, 32 - невыпадающий винт, 33 - паз.
Инструментальная система сфер №1 выполнена в виде рамки (34) на которой имеются 4 отверстия (19) под установку шпилек (3). Шпильки представляют собой стержень, один наконечник которого неподвижно устанавливается в отверстие (19) площадки (34), второй наконечник с шагом резьбы М3×0,5 предназначен для установки сфер (4). Каждая сфера (4) имеет глухое отверстие с соответствующей резьбой, что позволяет установить ее на свободный наконечник шпильки путем завинчивания по резьбе. В нижней части рамки (34) выполнен паз (33) и установлен невыпадающий винт (32) для крепления инструментальной системы сфер №1 на хирургический инструмент. Взаимное расположение сфер (4) формирует уникальную конфигурацию системы сфер, что позволяет ПО «Автоплан» программно распознавать детектируемый оптическим трекингом инструмент.
Инструментальная система сфер №1 предназначена для отслеживания инструмента хирурга в ходе операции под контролем системы навигации «Автоплан».
Конструкция инструментальной системы сфер №2 поясняется графическим материалом (фиг. 9), где обозначено: 35 - площадка для крепления сфер, 19 - отверстия под установку шпилек, 3 - шпильки, 4 - сферы, 32 - невыпадающий винт, 33 - паз.
Инструментальная система сфер №2 выполнена в виде рамки (35) на которой имеются 4 отверстия (19) под установку шпилек (3). Шпильки представляют собой стержень, один наконечник которого неподвижно устанавливается в отверстие (19) площадки (35), второй наконечник с шагом резьбы М3×0,5 предназначен для установки сфер (4). Каждая сфера (4) имеет глухое отверстие с соответствующей резьбой, что позволяет установить ее на свободный наконечник шпильки путем завинчивания по резьбе. В нижней части рамки (35) выполнен паз (33) и установлен невыпадающий винт (32) для крепления инструментальной системы сфер №2 на хирургический инструмент. Взаимное расположение сфер (4) формирует уникальную конфигурацию системы сфер, что позволяет ПО «Автоплан» программно распознавать детектируемый оптическим трекингом инструмент.
Инструментальная система сфер №2 предназначена для отслеживания инструмента хирурга в ходе операции под контролем системы навигации «Автоплан».
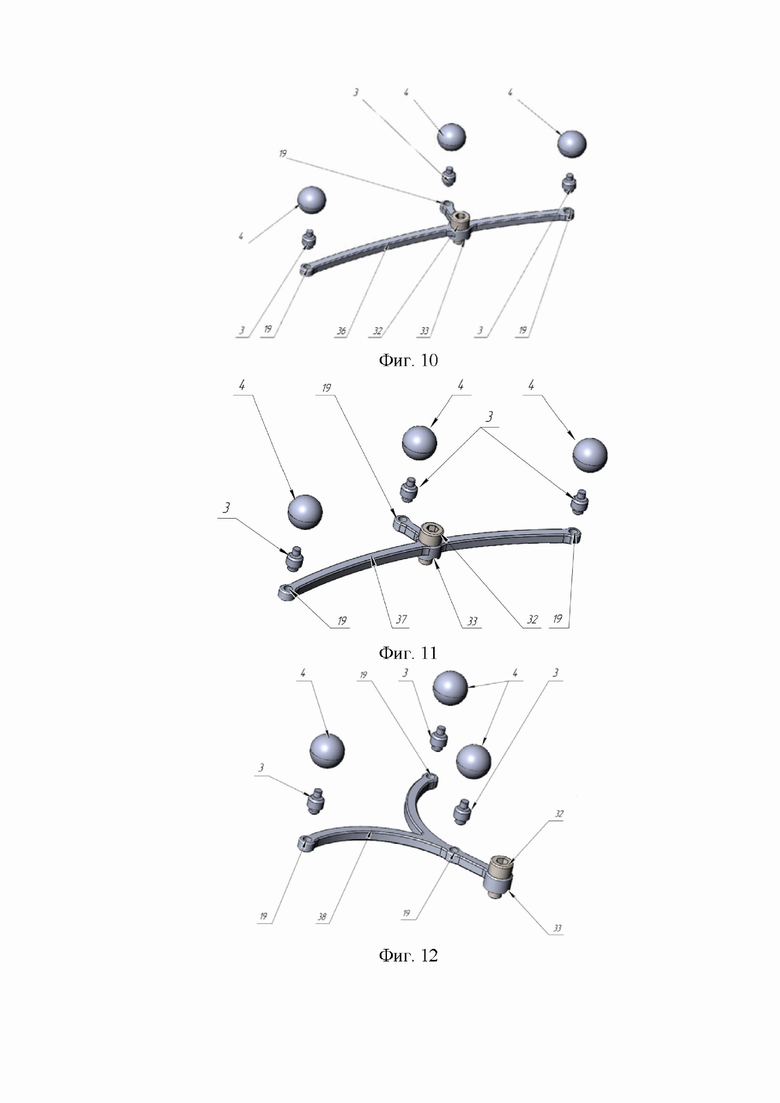
Конструкция инструментальной системы сфер №3 поясняется графическим материалом (фиг. 10), где обозначено: 36 - площадка для крепления сфер, 19 - отверстия под установку шпилек, 3 - шпильки, 4 - сферы, 32 - невыпадающий винт, 33 - паз.
Инструментальная система сфер №3 выполнена в виде площадки (36) на которой имеются 3 отверстия (19) под установку шпилек (3). Шпильки представляют собой стержень, один наконечник которого неподвижно устанавливается в отверстие (19) площадки (36), второй наконечник с шагом резьбы М3×0,5 предназначен для установки сфер (4). Каждая сфера (4) имеет глухое отверстие с соответствующей резьбой, что позволяет установить ее на свободный наконечник шпильки путем завинчивания по резьбе. В центре площадки (36) выполнен паз (33) и установлен невыпадающий винт (32) для крепления инструментальной системы сфер №3 на хирургический инструмент. Взаимное расположение сфер (4) формирует уникальную конфигурацию системы сфер, что позволяет ПО «Автоплан» программно распознавать детектируемый оптическим трекингом инструмент.
Инструментальная система сфер №3 предназначена для отслеживания инструмента хирурга в ходе операции под контролем системы навигации «Автоплан».
Конструкция инструментальной системы сфер №4 поясняется графическим материалом (фиг. 11), где обозначено: 37 - площадка для крепления сфер, 19 - отверстия под установку шпилек, 3 - шпильки, 4 - сферы, 32 - невыпадающий винт, 33 - паз.
Инструментальная система сфер №4 выполнена в виде площадки (37) на которой имеются 3 отверстия (19) под установку шпилек (3). Шпильки представляют собой стержень, один наконечник которого неподвижно устанавливается в отверстие (19) площадки (37), второй наконечник с шагом резьбы М3×0,5 предназначен для установки сфер (4). Каждая сфера (4) имеет глухое отверстие с соответствующей резьбой, что позволяет установить ее на свободный наконечник шпильки путем завинчивания по резьбе. В центре площадки (37) выполнен паз (33) и установлен невыпадающий винт (32) для крепления инструментальной системы сфер №4 на хирургический инструмент. Взаимное расположение сфер (4) формирует уникальную конфигурацию системы сфер, что позволяет ПО «Автоплан» программно распознавать детектируемый оптическим трекингом инструмент.
Инструментальная система сфер №4 предназначена для отслеживания инструмента хирурга в ходе операции под контролем системы навигации «Автоплан».
Конструкция инструментальной системы сфер №5 поясняется графическим материалом (фиг. 12), где обозначено: 38 - площадка для крепления сфер, 19 - отверстия под установку шпилек, 3 - шпильки, 4 - сферы, 32 - невыпадающий винт, 33 - паз.
Инструментальная система сфер №5 выполнена в виде площадки (38) на которой имеются 3 отверстия (19) под установку шпилек (3). Шпильки представляют собой стержень, один наконечник которого неподвижно устанавливается в отверстие (19) площадки (38), второй наконечник с шагом резьбы М3×0,5 предназначен для установки сфер (4). Каждая сфера (4) имеет глухое отверстие с соответствующей резьбой, что позволяет установить ее на свободный наконечник шпильки путем завинчивания по резьбе. В центре площадки (38) выполнен паз (33) и установлен невыпадающий винт (32) для крепления инструментальной системы сфер №5 на хирургический инструмент. Взаимное расположение сфер (4) формирует уникальную конфигурацию системы сфер, что позволяет ПО «Автоплан» программно распознавать детектируемый оптическим трекингом инструмент.
Инструментальная система сфер №5 предназначена для отслеживания инструмента хирурга в ходе операции под контролем системы навигации «Автоплан».
Уникальные формы инструментальных систем сфер №1-№5 позволяют программно отслеживать одновременно пять различных инструментов хирурга во время оперативного вмешательства.
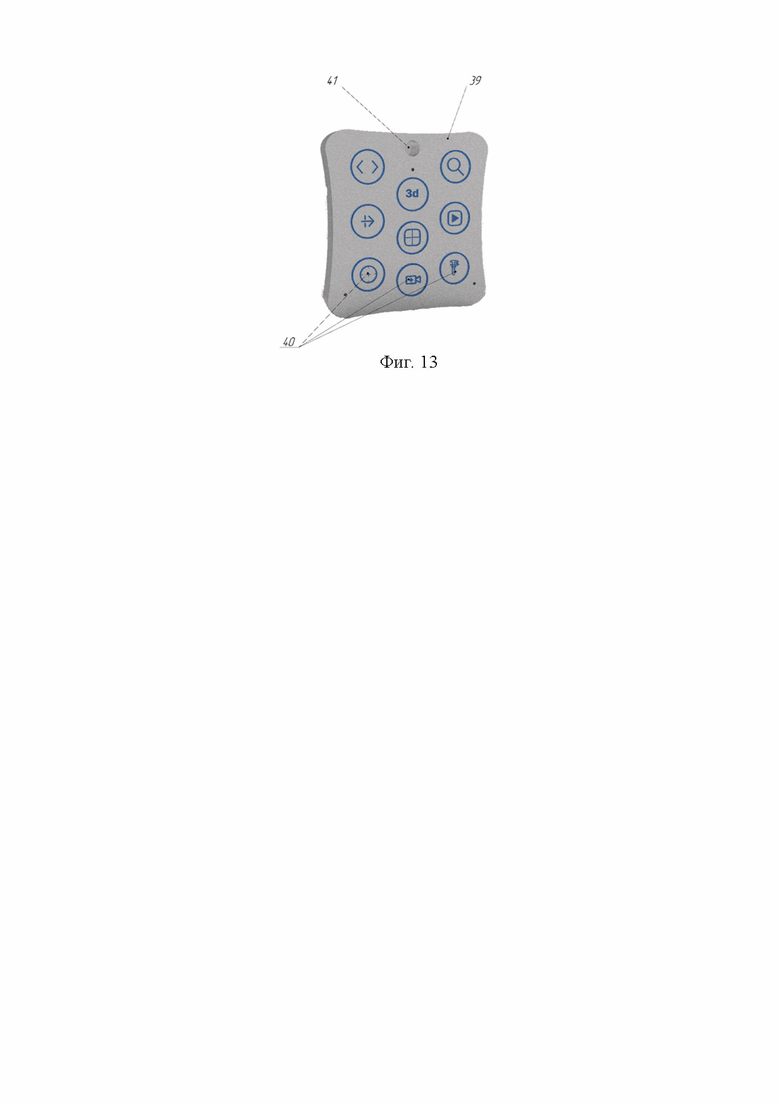
Конструкция площадки управления поясняется графическим материалом (фиг. 13), где обозначено: 39 - площадка, 40 - элементы управления, 41 - отверстие для крепления к мачте.
Площадка управления выполнена в виде прямоугольной площадки (39) с закругленными углами и изогнутыми краями. На площадку нанесены элементы управления (40) и выполнено отверстие (41) для крепления площадки к мачте.
Площадка управления используется для дистанционного управления функциями навигации из стерильной зоны в ходе операции под контролем системы навигации «Автоплан».
Ниже приведен клинический пример с использованием заявленного комплекта инструментов.
Пример 1. Пациент, Ж. 48 лет. Диагноз: параселлярная опухоль гипофиза.
Показания к удалению менингиомы транскранианльным доступом под контролем хирургической навигационной системы «Автоплан», обусловлены клиническими показаниями.
В предоперационном периоде использовались следующие методы диагностики:
- компьютерная томография (КТ) с толщиной среза 0,625 см, получен 351 срез;
- магнитнорезонансная томография (МРТ) головного мозга пациента с и без контрастного усиления в трех проекциях: аксиальный, фронтальный и сагиттальный, с помощью аппарата 1,5 Тл (Тесла) в 45 срезах, что включало зону турецкого седла и визуализировалась локализации опухоли.
Результаты исследований были загружены в ПО «Автоплан», была построена трехмерная модель поверхности головы пациента, а также сегментированы границы опухоли. С помощью инструментов измерения в ПО «Автоплан» получены размеры опухоли на всех трех проекциях, а также виртуально вычислен объем опухоли, он составил 8,76 см3, спланированы траектории доступа к новообразованию. Совмещены данные МРТ с КТ - данными пациента.
В операционном периоде:
1. После введения пациента в наркоз установка головы в систему фиксации черепа.
2. В специальное крепление устанавливается базисная система сфер. Базис располагается сферами в направлении стереокамеры хирургической навигационной системы «Автоплан», в районе операционного поля, в таком положении, чтобы стереокамерой детектировалось положение отражающих сфер базиса и не препятствовало работе оперирующего врача и операционного медицинского персонала.
3. В фиксатор операционного стола устанавливается нижняя и средние части мачты (в сборе) для использования калибратора, после перехода на стерильную зону.
4. Далее, с помощью указки навигационной укороченной выполнена регистрация пациента по ключевым точкам (заранее размеченным в ПО «Автоплан» по анатомическим ориентирам), находящимся на поверхности тела пациента.
5. После проверки корректности совмещения персонифицированной модели с реальной анатомией пациента, производится переход на стерильную операционную зону, с заменой базисной системы сфер на стерильную и установкой площадки управления для дистанционного управления функциями навигации из стерильной зоны.
6. После накрытия операционной зоны стерильным бельем, в среднюю часть мачты, установленной в фиксатор операционного стола, вкручивается верхняя часть мачты со стерильным калибратором. Калибратор находится так же в зоне детекции стереокамерой световозвращающих сфер, в рабочем поле хирурга.
7. С использованием специального носового ретрактора производится этап санации слизистой носовой полости для формирования операционного коридора.
8. Далее открывается передняя стенка клиновидной кости. Через клиновидную пазуху производится доступ к гипофизарной ямке, которая открывается бором и кусачками.
9. На всех этапах доступа для удобства ориентации хирурга и обнаружения турецкого седла используется указка навигационная укороченная с наклоном кончика. В отличие от основной навигационной указки, ее использование удобнее для трансназальных вмешательств, что обусловлено кривизной анатомических структур и трудностью доступов.
Для переключения режимов отображения, а также режимов навигации воспользовались стерильной площадкой управления и указкой навигационной общего назначения.
10. При трансназальном доступе к гипофизу используется эндоскоп с различными углами зрения (30°, 45° и 70°). На рукоятке эндоскопа зафиксировано универсальное крепление из сплава алюминия с инструментальной системой сфер №5 - для использования совместно с навигацией. Габариты эндоскопа калибруются с помощью калибратора на мачте, установленного в фиксатор операционного стола.
11. Интраоперационное отслеживание рабочей части эндоскопа в навигации обеспечивает лучшую визуализацию и ориентацию хирурга в зоне хирургического доступа. На данном этапе оперативного лечения позволяет заглянуть за костные края доступа не увеличивая раны, вследствие чего минимизируется размер резекции основания черепа и таким образом сокращается операционная травма. При эндоскопии хорошо визуализируются анатомические структуры (сонные артерии, крылонебный нерв, а также воронка гипофиза) при этом снижается риск осложнений.
12. После рассечения твердой мозговой оболочки в области дна турецкого седла обнаруживается ткань опухоли гипофиза. Опухоль хорошо отграничена от желтоватой нормальной ткани гипофиза.
13. Производится удаление опухоли специальными кюретками и боковыми кусачками.
14. Под контролем хирургической навигации была выполнена операция по удалению аденомы гипофиза, а с использованием навигированного эндоскопа становится возможным контроль полного удаления опухоли и расположения инструмента внутри полости, при этом риск осложнений (повреждение сонной артерии) снижается.
15. Проведено контрольное МРТ - сканирование после операции. Обнаружено тотальное удаление опухоли.
Пациент выписан на 2-е сутки, постоперационных осложнений не выявлено.
Особенность оперативного вмешательства с использованием эндоскопической визуализации совместно с системой хирургической навигации «Автоплан» заключается в том, что при доступах с ограниченным операционным полем рекомендовано прибегнуть к малоинвазивному доступу для улучшения состояния пациента в постоперационном периоде.
Применение навигационного инструмента (навигационной указки) в сочетании с дополнительным заранее скалиброванным эндоскопом позволило малоинвазивно обеспечить доступ для обзора и последующей резекции опухоли, что также актуально для применения при оперативных вмешательствах нарушенной анатомии.
Учитывая положительный опыт использования полезной модели, комплект инструментов для хирургии может применяться с системой хирургической навигации «Автоплан» при проведении оперативных вмешательств в области нейрохирургии, эндокринологии, травматологии, оториноларингологии и ортопедии.
| название | год | авторы | номер документа |
|---|---|---|---|
| Комплект инструментов для нейрохирургии позвоночника для применения с системой хирургической навигации | 2023 |
|
RU2823108C1 |
| Способ регистрации пациента с его персонифицированной моделью в программном обеспечении хирургической навигационной системы при помощи рентгеновских изображений с использованием калибрующего устройства | 2023 |
|
RU2824966C1 |
| Способ подготовки и выполнения хирургической операции на голове с использованием смешанной реальности | 2020 |
|
RU2754288C1 |
| Способ топической диагностики и визуализации аденом околощитовидных желез при вторичном и третичном гиперпаратиреозе | 2018 |
|
RU2683743C1 |
| СПОСОБ ВИЗУАЛИЗАЦИИ АДЕНОМ ОКОЛОЩИТОВИДНЫХ ЖЕЛЕЗ ПРИ ПЕРВИЧНОМ ГИПЕРПАРАТИРЕОЗЕ | 2018 |
|
RU2688804C1 |
| УСТРОЙСТВО ДЛЯ НАВИГАЦИИ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ | 2023 |
|
RU2810445C1 |
| Способ подготовки и выполнения хирургической операции с использованием дополненной реальности и комплекс оборудования для её осуществления | 2019 |
|
RU2707369C1 |
| ЭКСПЕРТНАЯ СИСТЕМА НА БАЗЕ МЕДИЦИНСКОГО МАНИПУЛЯЦИОННОГО РОБОТА ДЛЯ ТРАНСПЕДИКУЛЯРНОЙ ФИКСАЦИИ ПОЗВОНОЧНИКА | 2023 |
|
RU2833780C1 |
| СПОСОБ ХИРУРГИЧЕСКОГО ЛЕЧЕНИЯ СПОНДИЛОЛИСТЕЗА НА ПОЯСНИЧНО-КРЕСТЦОВОМ УРОВНЕ | 2024 |
|
RU2832968C2 |
| Способ подготовки и выполнения хирургической операции на органах малого таза | 2020 |
|
RU2736800C1 |
Изобретение относится к медицинской технике, а именно к комплекту инструментов для нейрохирургических операций под контролем системы хирургической навигации. Комплект инструментов для нейрохирургических операций под контролем системы хирургической навигации содержит указку навигационную, указку навигационную укороченную, указку навигационную укороченную с наклоном кончика, мачту, калибратор, площадку управления, универсальное крепление, базисную систему сфер, первую и вторую инструментальные системы сфер и третью, четвертую и пятую инструментальные системы сфер. Указка навигационная выполнена в виде стилета и включает рукоять с 3-мя установленными сферами, закрепленными резьбовым соединением на неподвижно установленных шпильках, и конусообразный кончик длиной 17 см. Указка навигационная укороченная выполнена в виде стилета и включает рукоять с 3-мя установленными сферами, закрепленными резьбовым соединением на неподвижно установленных шпильках, и конусообразный кончик длиной 12 см. Указка навигационная укороченная с наклоном кончика выполнена в виде стилета и включает рукоять с 3-мя установленными сферами, закрепленными резьбовым соединением на неподвижно установленных шпильках, и конусообразный кончик длиной 12 см, изогнутый на 7 градусов. Мачта выполнена в виде вертикальной конструкции и включает основание диаметром 15 мм, среднюю часть, вкрученную в основание, и вершину, соединенную со средней частью с помощью соединительной гайки и выполненную с возможностью установки инструментария как в параллельной, так и в перпендикулярной плоскости с помощью винтов и отверстий. Калибратор выполнен в виде площадки Т-образной формы с 3-мя установленными сферами, закрепленными резьбовым соединением на неподвижно установленных шпильках, с 3-мя лунками для проведения калибровки инструментов и местом для крепления к мачте. Площадка управления выполнена в виде прямоугольной площадки с закругленными углами, изогнутыми краями и нанесенными элементами управления. Универсальное крепление из сплава алюминия прямой формы с винтом и отверстием для установки хирургического инструмента с одной стороны, и винтом для установки инструментальной системы сфер с другой стороны. Базисная система сфер выполнена в виде площадки с 3-мя установленными сферами, закрепленными резьбовым соединением с помощью шпилек с двусторонней резьбой и невыпадающим винтом в центре площадки для крепления на хирургический инструмент. Первая и вторая инструментальные системы сфер, каждая из которых выполнена в виде рамки с 4-мя установленными сферами, закрепленными резьбовым соединением с помощью шпилек с двусторонней резьбой и невыпадающим винтом в нижней части рамки для крепления на хирургический инструмент. Третья, четвертая и пятая инструментальные системы сфер, каждая из которых выполнена в виде площадки с 3-мя установленными сферами, закрепленными резьбовым соединением с помощью шпилек с двусторонней резьбой и невыпадающим винтом в центре площадки для крепления на хирургический инструмент. Каждая из инструментальных систем сфер формирует свою индивидуальную конфигурацию сфер для ее распознавания системой хирургической навигации. Использование изобретения позволяет обеспечить навигацию при проведении оперативных вмешательств. 13 ил.
Комплект инструментов для нейрохирургических операций под контролем системы хирургической навигации, содержащий указку навигационную, выполненную в виде стилета и включающую рукоять с 3-мя установленными сферами, закрепленными резьбовым соединением на неподвижно установленных шпильках, и конусообразный кончик длиной 17 см; указку навигационную укороченную, выполненную в виде стилета и включающую рукоять с 3-мя установленными сферами, закрепленными резьбовым соединением на неподвижно установленных шпильках, и конусообразный кончик длиной 12 см; указку навигационную укороченную с наклоном кончика, выполненную в виде стилета и включающую рукоять с 3-мя установленными сферами, закрепленными резьбовым соединением на неподвижно установленных шпильках, и конусообразный кончик длиной 12 см, изогнутый на 7 градусов; мачту, выполненную в виде вертикальной конструкции и включающую основание диаметром 15 мм, среднюю часть, вкрученную в основание, и вершину, соединенную со средней частью с помощью соединительной гайки и выполненную с возможностью установки инструментария как в параллельной, так и в перпендикулярной плоскости с помощью винтов и отверстий; калибратор, выполненный в виде площадки Т-образной формы с 3-мя установленными сферами, закрепленными резьбовым соединением на неподвижно установленных шпильках, с 3-мя лунками для проведения калибровки инструментов и местом для крепления к мачте; площадку управления, выполненную в виде прямоугольной площадки с закругленными углами, изогнутыми краями и нанесенными элементами управления; универсальное крепление из сплава алюминия прямой формы с винтом и отверстием для установки хирургического инструмента с одной стороны, и винтом для установки инструментальной системы сфер с другой стороны; базисную систему сфер, выполненную в виде площадки с 3-мя установленными сферами, закрепленными резьбовым соединением с помощью шпилек с двусторонней резьбой и невыпадающим винтом в центре площадки для крепления на хирургический инструмент; первую и вторую инструментальные системы сфер, каждая из которых выполнена в виде рамки с 4-мя установленными сферами, закрепленными резьбовым соединением с помощью шпилек с двусторонней резьбой и невыпадающим винтом в нижней части рамки для крепления на хирургический инструмент; третью, четвертую и пятую инструментальные системы сфер, каждая из которых выполнена в виде площадки с 3-мя установленными сферами, закрепленными резьбовым соединением с помощью шпилек с двусторонней резьбой и невыпадающим винтом в центре площадки для крепления на хирургический инструмент, при этом каждая из инструментальных систем сфер формирует свою индивидуальную конфигурацию сфер для ее распознавания системой хирургической навигации.
| US 5617857 A, 08.04.1997 | |||
| Способ установки протеза межпозвонкового диска с использованием аппарата для нейронавигации | 2022 |
|
RU2785030C1 |
| CN 219230110 U, 23.06.2023 | |||
| US 2023263541 A1, 24.08.2023. | |||

