Уровень техники
Изобретение относится к самоходным рабочим машинам, к способу и системе управления рабочей машиной, а также к программному продукту.
Самоходные рабочие машины используются в сложных условиях, таких как неровная местность и склоны. Например, если компонент рабочей машины ломается или проявляет неисправность на склоне, управлять рабочей машиной становится чрезвычайно сложно из-за быстрого развития аварийной ситуации, и это даже несмотря на то, что у оператора есть возможность активировать рабочий тормоз или кнопку аварийной остановки.
Сущность изобретения
Таким образом, задача изобретения заключается в разработке усовершенствованных рабочей машины, системы и способа управления, а также программного продукта. Предложенное техническое решение характеризуется признаками, раскрытыми в независимых пунктах формулы. Предпочтительные варианты изобретения раскрыты в зависимых пунктах формулы.
В представленном далее техническом решении контролируют уровень давления насоса в системе гидравлической силовой передачи рабочей машины или энергию, подаваемую на электрический приводной двигатель электрической рабочей машины, и/или контролируют скорость вращения вала приводного двигателя рабочей машины и вращение средств перемещения рабочей машины. Уровень давления насоса для гидравлической силовой передачи или энергию, подаваемую на электрический приводной двигатель, сравнивают с нижним пороговым значением для обнаружения ситуации неисправности, и/или скорость вращения вала приводного двигателя сравнивают с вращением средств перемещения также для обнаружения ситуации неисправности. В случае обнаружения неисправности, тормозной системой рабочей машины управляют, чтобы обеспечивать торможение. Раскрытое техническое решение позволяет обнаруживать ситуации неисправности различного рода, и после обнаружения ситуации неисправности тормоз рабочей машины может быть автоматически активирован, а следовательно, рабочая машина может оставаться управляемой.
Краткое описание чертежей
Далее изобретение раскрыто более подробно на примере предпочтительных вариантов его осуществления и со ссылкой на сопроводительные чертежи, на которых подобные элементы обозначены одинаковыми номерами позиций, при этом:
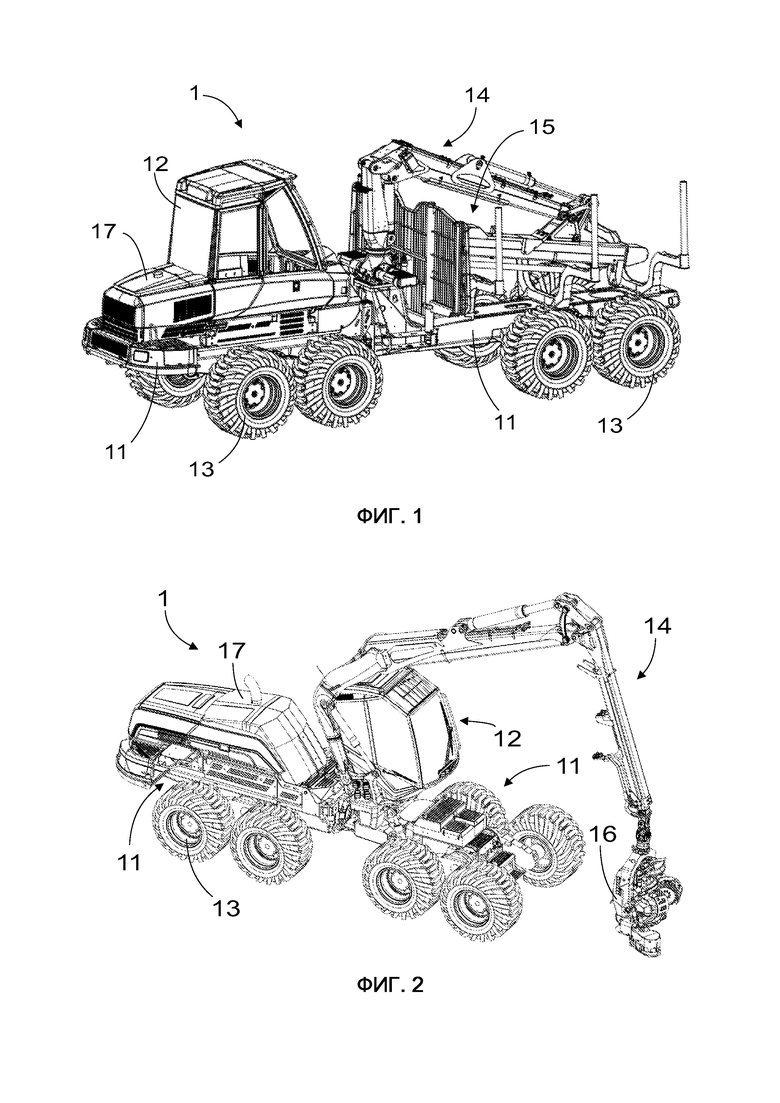
на фиг.1 показана самоходная рабочая машина;
на фиг.2 показана другая самоходная рабочая машина;
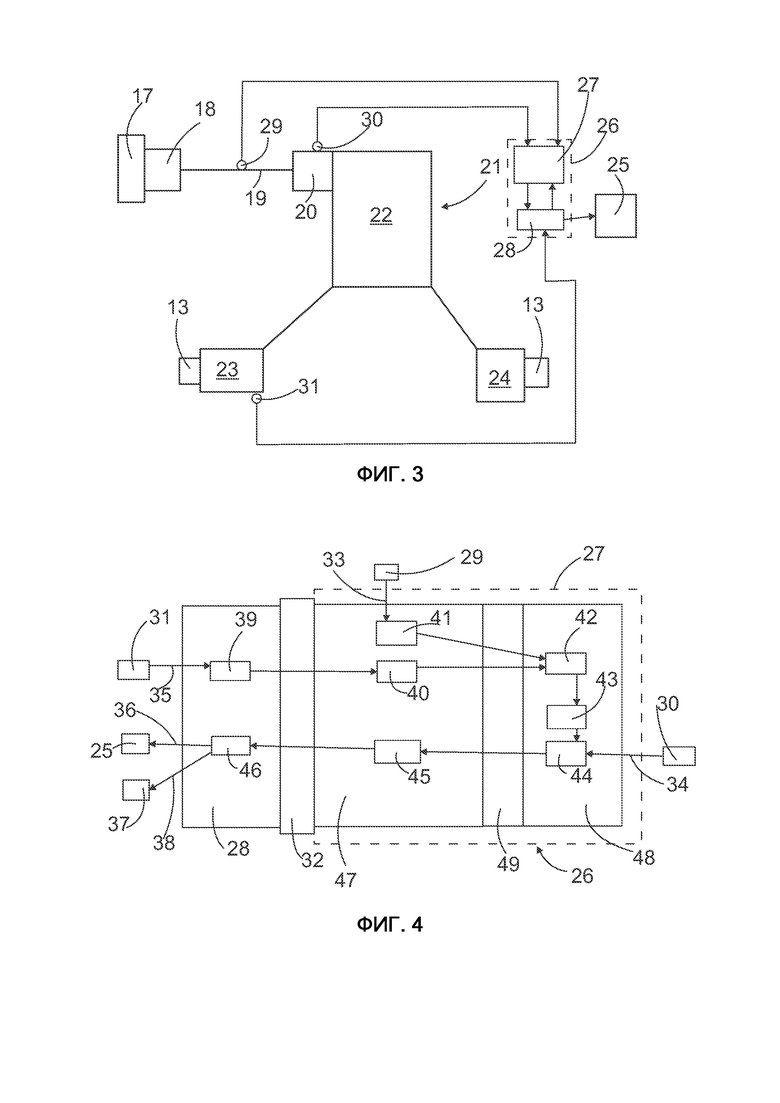
на фиг.3 показана схема некоторых компонентов самоходной рабочей машины; на фиг.4 показана схема системы управления самоходной рабочей машиной.
Подробное раскрытие изобретения
В настоящее время самоходные рабочие машины все чаще и чаще используются в сложных условиях, таких как неровная местность и склоны. Например, все более распространенной становится заготовка древесины на склонах. В условиях склона, нагрузка на рабочую машину возрастает по сравнению с обычными условиями на ровной поверхности. Повышенная нагрузка увеличивает нагрузку на компоненты и сокращает срок их службы. Вот почему в условиях склона компоненты способствуют развитию неисправностей, и аварийные ситуации возникают чаще, чем раньше.
Если рабочая машина находится на склоне и прогрессирует аварийное состояние, то из-за быстроты протекания ситуации рабочая машина может стать крайне сложной в управлении, независимо от того, имеет или нет оператор возможность применить рабочий тормоз или кнопку аварийной остановки. Порой ситуация может стать настолько сложной, что оператор даже будет не способен совершить необходимые действия по управлению рабочей машиной.
Как указано выше, в представленном техническом решении контролируют уровень давления насоса в системе гидравлической силовой передачи гидравлической рабочей машины, или энергию, подаваемую на электрический приводной двигатель электрической рабочей машины, и/или контролируют скорость вращения вала приводного двигателя рабочей машины и вращение средств перемещения рабочей машины. Уровень давления насоса гидравлической силовой передачи или энергию, подаваемую на электрический двигатель, сравнивают с нижним пороговым значением для обнаружения ситуации неисправности, и/или скорость вращения вала приводного двигателя сравнивают с вращением средств перемещения также для обнаружения ситуации неисправности. В случае обнаружения ситуации неисправности тормозной системой рабочей машины управляют для применения тормозов. Согласно одному из вариантов осуществления, торможение происходит посредством стояночного тормоза и/или рабочих тормозов. Согласно одному из вариантов осуществления, нижнее пороговое значение для насоса в системе гидравлической силовой передачи может составлять 50% или менее от номинального давления в гидравлической системе силовой передачи. Ситуация неисправности может быть обнаружена очень быстро. Аналогично, меры по управлению рабочей машиной, иначе говоря - активация тормоза, могут выполняться быстро и надежно.
Согласно одному из вариантов осуществления, система гидравлической силовой передачи включает в себя подающий насос, гидравлический приводной двигатель и, предпочтительно, приводной насос, при этом уровень давления насоса в системе гидравлической силовой передачи контролируют датчиком давления. Согласно второму варианту осуществления, приводной двигатель представляет собой электромотор, и для контроля энергии, подаваемой на приводной двигатель, контролируют уровень напряжения устройства, такого как аккумуляторная батарея, подающего энергию на электрический двигатель. В раскрытых технических решениях контроль уровня давления насоса и энергии, подаваемой на приводной двигатель, может быть реализован простым и надежным образом.
Согласно одному из вариантов осуществления, скорость вращения вала приводного двигателя контролируют посредством датчика скорости вращения, контролирующего вращение приводного двигателя. Таким образом, контроль вала приводного двигателя можно реализовать простым и надежным образом.
Согласно одному из вариантов осуществления, вращение средств перемещения контролируют посредством датчика скорости вращения. Таким образом, контроль вращения средств перемещения может быть реализован простым и надежным образом. Такой датчик также можно легко адаптировать к рабочей машине в качестве модернизации.
Согласно одному из вариантов осуществления, датчик скорости вращения, контролирующий вращение средств перемещения, выполнен с возможностью контролировать вращение непосредственно средств перемещения или вращение компонента, такого как дифференциал, непосредственно связанного с ними. В таком случае можно обнаружить большое разнообразие ситуаций потенциальной неисправности, связанных с приводной силовой передачей.
Согласно одному из вариантов осуществления, вращение средств перемещения контролируют путем контроля скорости и/или направления движения рабочей машины относительно поверхности, т.е. грунта. Таким образом, рабочая машина может иметь датчик, измеряющий скорость и/или направление движения рабочей машины относительно грунта. Таким датчиком может быть, например, датчик ускорения рабочей машины.
Согласно одному из вариантов осуществления, тормозная система включает в себя рабочий тормоз и стояночный тормоз, при этом в ответ на обнаружение первой и/или второй ситуации неисправности блок управления выполнен с возможностью управлять, по меньшей мере, стояночным тормозом. Таким образом, рабочую машину можно контролировать эффективным, простым и надежным образом.
Обратимся к фиг.1 и 2. На фиг.1 и 2 показаны рабочие машины. Рабочая машина 1 может представлять собой самоходную рабочую машину 1, а в особо предпочтительном случае - самоходную рабочую машину 1, выполненную с возможностью перемещения по наклонной и/или неровной поверхности. Такая самоходная рабочая машина может быть, например, лесозаготовительным агрегатом, например, форвардером, как показано на фиг.1, харвестером, как показано на фиг.2, или другой лесозаготовительной машиной, такой как приводная машина другого типа, пригодная для перевозки груза, или комбинацией форвардера или харвестера, или другой самоходной рабочей машиной, такой как горнодобывающая машина или экскаватор.
Рабочая машина 1 может содержать по меньшей мере одну основную часть 11 и стреловую конструкцию 14, установленную на указанной по меньшей мере одной основной части. Рабочая машина может также содержать инструмент 16, установленный, например, на стреловой конструкции 14. Инструмент может содержать, например, подъемный элемент, такой как грузовой ковш, и/или инструмент для обработки древесины, такой как харвестерная головка. Лесозаготовительная машина может быть выполнена с возможностью управления посредством воздействия на основную часть и содержать по меньшей мере две основные части 11.
В зависимости от варианта изобретения, рабочая машина 1 может содержать другие конструктивные части. Например, рабочая машина 1 может содержать кабину 12 управления, установленную на по меньшей мере одной основной части 11. Рабочая машина 1 может дополнительно содержать средства 13 перемещения, которые могут включать в себя по меньшей мере одно из следующего: колеса, установленные на оси; колеса, установленные на качающейся оси; колеса, установленные на сдвоенной оси или шасси; гусеничную систему; или другие известные средства, обеспечивающие перемещение рабочей машины относительно рабочей поверхности. Для специалиста в данной области техники очевидно, что рабочая машина 1 штатно включает в себя многочисленные дополнительные конструктивные и функциональные компоненты и узлы, определяемые типом рабочей машины, такие как грузовой отсек 15, силовой блок 17 и т.п.
На фиг.3 показана схема некоторых компонентов, связанных с перемещением подвижной рабочей машины 1, и некоторых компонентов системы управления.
Силовой блок 17, который может представлять собой дизельный двигатель, вращает подающий насос 18. Подающий насос 18 создает объемный поток в гидравлической системе 19, а нагрузка на гидравлическую систему создает давление. Приводной двигатель 20 вовлекается во вращение за счет энергии гидравлической жидкости, находящейся в гидравлической системе 19. В этом случае, приводной двигатель 20 гидравлической рабочей машины 1 представляет собой гидромотор.
В электрической рабочей машине 1 приводной двигатель 20 представляет собой электромотор. В электрической рабочей машине энергия подается в приводной двигатель 20 посредством энергоснабжающего устройства, такого как аккумуляторная батарея.
Между приводным двигателем 20 и средствами 13 перемещения находится приводная силовая передача 21. Приводная силовая передача 21 может содержать механическую коробку передач и механические средства приводной силовой передачи, такие как оси, тележки, соединения и т.д. В альтернативном случае, приводная силовая передача 21 может быть гидравлической или электрической. На фиг.3 в качестве примера показана коробка 22 передач, передний дифференциал 23 и задний дифференциал 24 приводной силовой передачи. В приводной силовой передаче показаны не все ее компоненты и детали, поскольку они и так хорошо известны специалисту в данной области техники.
На фиг.3 дополнительно показаны тормоза 25. Самоходная рабочая машина 1 может иметь рабочий тормоз и стояночный тормоз. Можно передавать усилие на часть тормозного устройства, образующего рабочий тормоз, используемый для остановки самоходной рабочей машины 1, с помощью рабочей среды под давлением, такой как гидравлическая жидкость, причем данное усилие активирует рабочий тормоз, чтобы остановить самоходную рабочую машину. В соединении с тормозным устройством стояночного тормоза может иметься гибкий элемент, такой как пружина, которая удерживает стояночный тормоз активированным, когда к тормозному устройству не прикладывается усилие посредством рабочей среды под давлением. Таким образом, можно посредством рабочей среды под давлением направить усилие на часть тормозного устройства, образующую стояночный тормоз, при этом указанное усилие высвобождает стояночный тормоз, обеспечивая возможность перемещения рабочей машины. Когда воздействие усилия среды под давлением на стояночный тормоз прекращается, стояночный тормоз активируется, не позволяя стоящей рабочей машине начать двигаться самостоятельно. Типовой тормоз рабочей машины, в частности используемый в лесозаготовительной машине, представляет собой тормоз, управляемый средой под давлением, например, гидравлически управляемый, комбинированный рабочий и стояночный тормоз, причем одно и то же тормозное устройство имеет средства для активации как стояночного тормоза, так и рабочего тормоза, скомбинированных в нем. В настоящей заявке не приводятся конструктивные особенности тормозов, гидравлической системы стояночного тормоза и гидравлической системы рабочего тормоза, поскольку эти подробности и так известны специалисту.
Самоходная рабочая машина 1 имеет блок управления 26. Блок 26 управления может быть одним объектом, или блок управления может состоять из двух или более блоков. В случае, показанном на фиг.3, блок 26 управления состоит из блока 27 управления машиной и дополнительного блока 28 управления. Блок 27 управления машиной и дополнительный блок 28 управления могут быть соединены шиной передачи данных, такой как CAN-шина.
В блоке 26 управления накапливается информация о функционировании рабочей машины. Эта информация может быть получена, например, от различных датчиков. С помощью блока 26 управления осуществляют управление работой рабочей машины. На фиг.3 в качестве примера такого управления представлено управление тормозами 25.
К подающему насосу 18 гидравлической системы 19 подключен датчик 29 давления. Датчик давления 29 отслеживает уровень давления гидравлической жидкости в питающем насосе системы гидравлической силовой передачи, т.е. давление подачи в гидравлической системе 19, и отправляет информацию об уровне давления в блок 26 управления.
К приводному двигателю 20 подключен датчик 30 скорости вращения. Датчик 30 скорости вращения отслеживает вращение приводного двигателя 20 и отправляет информацию о скорости вращения приводного двигателя 20 в блок 26 управления.
К шестерне 23 переднего дифференциала подключен датчик 31 скорости вращения. Датчик 31 скорости вращения отслеживает вращение и направление вращения шестерни 23 переднего дифференциала и отправляет информацию о скорости вращения и направлении вращения шестерни 23 переднего дифференциала в блок 26 управления.
Если посредством датчика 29 давления обнаружено, что уровень давления подачи гидравлической системы 19 слишком низок, то в ответ на обнаружение слишком низкого уровня давления тормозу 25 подается управляющая команда. В этом случае блок 26 управления соответственно активирует тормоз 25.
Установить, что уровень давления подачи в гидравлической системе 19 слишком низкий можно, например, так: датчик 29 давления передает информацию о давлении в блок 26 управления, при этом в блоке 26 управления задано нижнее пороговое значение. В этот момент блок 26 управления сравнивает информацию о давлении с нижним пороговым значением и, если значение ниже нижнего порогового значения, выдает управляющую команду тормозу 25. Датчик 29 давления может представлять собой датчик нижнего порогового значения, который выдает предупреждающий сигнал непосредственно в блок 26 управления в случае, если указанное значение ниже нижнего порогового значения; причем блок управления, при получении предупреждающего сигнала, выдает управляющую команду тормозу 25.
Нормальное или номинальное давление гидравлической системы при нормальной эксплуатации может изменяться в зависимости от нагрузки, например, от 20 до 28 бар. В этом варианте осуществления нижний пороговый уровень давления может быть задан равным 9 бар. Следовательно, согласно одному из вариантов изобретения, нижнее пороговое значение уровня давления может составлять 50% или менее от номинального давления в системе гидравлической силовой передачи. Нижнее пороговое значение может быть задано фиксированным, даже если номинальное давление изменяется, или нижнее пороговое значение может изменяться в соответствии с изменением номинального давления.
В дополнение к выдаче команды для тормозов 25, блок 26 управления может выдавать предупреждающий сигнал пользователю. Предупреждающим сигналом может быть, например, включение сигнальной лампочки, такой как LED-лампочка, звуковой сигнал или предупреждающий символ, отображаемый на пользовательском интерфейсе, или другая реализация, обеспечивающая выдачу предупреждающего сигнала пользователя.
Слишком низкий уровень давления подачи в гидравлической системе 19 говорит о ситуации неисправности рабочей машины. В ситуациях неисправности гидравлическая жидкость может бесконтрольно теряться. Таким образом, путем отслеживания уровня давления можно обнаружить по меньшей мере одну из следующих неисправностей: неисправности в соединениях/амортизаторах (между маховиком и насосами), большинство неисправностей приводного насоса, большинство неисправностей приводного двигателя, поврежденные шланги в приводной гидравлике, неисправности подающего насоса, утечки в системах, использующих давление подачи, таких как передаточный цилиндр в редукторе.
Предложенное техническое решение позволяет выявить конкретную ситуацию неисправности. Однако, возможные изменения давления в приводном двигателе, возникающие, например, в результате изменений нагрузки, не являются ситуациями неисправности, подлежащими обнаружению с помощью вышеизложенного изобретения.
Вместо или в дополнение к управлению тормозами на основании слишком низкого давления подачи в раскрытой выше гидравлической системе 19, тормозами можно управлять в соответствии с информацией, предоставляемой датчиками 30 и 31 скорости вращения. Реализация этого варианта может быть описана следующим образом: посредством датчика давления 29 и/или датчиков 30 и 31 скорости вращения обнаруживают ситуацию неисправности, и в ответ на обнаружение ситуации неисправности выдают управляющую команду тормозам 25.
Идея одного варианта изобретения заключается в том, что блок 26 управления активирует в этом случае использование стояночного тормоза. Идея другого варианта заключается в том, что блок управления 26 активирует в этом случае использование рабочего тормоза. Идея еще одного варианта изобретения заключается в том, что блок управления 26 активирует в этом случае использование как рабочего тормоза, так и стояночного тормоза.
В нормальной ситуации приводной двигатель 20 вращается с определенной скоростью, а передний дифференциал 23 вращается со скоростью, имеющей определенное соотношение с вращением приводного двигателя 20. Это соотношение определяется приводной силовой передачей 21. В предложенном техническом решении блок 26 управления сравнивает информацию о скорости вращения от датчика 30 скорости вращения приводного двигателя 20 с информацией о скорости вращения от датчика 31 скорости вращения шестерни 23 переднего дифференциала. Если разница между скоростями вращения больше, чем в нормальной ситуации, то блок 26 управления выдает управляющую команду на тормоз 25 и предупреждающий сигнал для пользователя. Информация о направлении, поступающая от датчика 31 скорости вращения шестерни 23 переднего дифференциала, может быть использована путем сравнения полученной информации о направлении, указывающей направление движения средства 13 перемещения, с направлением, в котором средство 13 перемещения должно перемещаться, на основании того, что имеется на выходе двигателя 20. Если направление движения средства 13 перемещения отличается от требуемого, то тормозу 25 выдается управляющая команда, а пользователю -предупреждающий сигнал. Таким образом, если рабочая машина 1 начинает двигаться в отличающемся от требуемого направлении, активируются тормоза 25.
Датчик 30 скорости вращения приводного двигателя 20 представляет собой датчик, контролирующий скорость вращения приводного двигателя 20 и, следовательно, скорость вращения вала приводного двигателя 20 и скорость вращения вала приводного двигателя 20. Скорость вращения вала приводного двигателя 20 можно контролировать, например, путем ее вычисления на основании пропускной способности насоса приводной силовой передачи и угла двигателя, т.е. объема двигателя.
Датчик 31 скорости вращения шестерни 23 переднего дифференциала представляет собой датчик, контролирующий вращение средств 13 перемещения. Таким образом, вращение средств 13 перемещения можно отслеживать с помощью датчика скорости вращения, который контролирует вращение дифференциала. Согласно одному из вариантов изобретения, вращение средств 13 перемещения можно контролировать с помощью датчика скорости вращения, который отслеживает вращение непосредственно средств 13 перемещения или вращение компонента, непосредственно присоединенного к средствам 13 перемещения, такого как колесная ось, дифференциал или тележка. Если вращение средств 13 перемещения или компонента, непосредственно к ним присоединенного, контролируют непосредственно с помощью датчика скорости вращения, то можно обнаружить довольно много ситуаций неисправности, относящихся к приводной силовой передаче.
Согласно одному из вариантов изобретения, вращение средств 13 перемещения обнаруживают путем контроля скорости и/или направления рабочей машины 1 относительно поверхности, т.е. грунта. В этом случае, рабочая машина 1 может иметь датчик, измеряющий скорость и/или направление движения рабочей машины 1 относительно поверхности. Такой датчик может быть, например, датчиком ускорения рабочей машины 1. Датчик ускорения может быть отдельным датчиком или встроенным в блок 26 управления.
Предложенное техническое решение также можно охарактеризовать тем, что определению подлежит скорость вращения вала приводного двигателя 20 для перемещения рабочей машины 1, иначе говоря, определяют, как должна двигаться рабочая машина 1 (направление и скорость перемещения). По средствам 13 перемещения определяют фактические скорость и направление перемещения рабочей машины 1. Если обнаруженное на основании средств 13 перемещения отличается от обнаруженного на основании приводного двигателя 20, то это - ситуация неисправности. Таким образом, можно выявлять разнообразные ситуации неисправности, связанные с приводной силовой передачей 21. Обнаруженной неисправностью может быть по меньшей мере одна из следующих неисправностей: повреждение редуктора, выход редуктора из передачи, неисправность тележки, неисправность приводного вала, поломка вала приводного двигателя.
Согласно одному из вариантов изобретения, если разница значений между скоростью вращения вала приводного двигателя 20 и сопоставляемой скоростью вращения, измеренной по средству перемещения, составляет более 3% от номинальной скорости вращения двигателя, то ситуацию определяют как ситуацию неисправности. Согласно другому варианту, ситуацию неисправности определяют как отклонение, составляющее более 5%, или отклонение, составляющее более 10%.
Рабочая машина 1 может иметь датчик для отслеживания того, находится ли рабочая машина на склоне. Такой датчик может быть отдельным или встроенным в блок 26 управления. Поскольку вышеуказанные ситуации неисправности могут быть более трудными для исправления, когда рабочая машина 1 находится на склоне, система может быть настроена таким образом, чтобы она активировалась при определении того, что рабочая машина 1 находится на склоне.
На фиг.4 показана система управления рабочей машиной 1. Блок 26 управления содержит блок 27 управления машиной и дополнительный блок 28 управления. Блок 27 управления машиной может содержать первый модуль 47 управления и второй модуль 48 управления. Ссылочный номер 49 иллюстрирует передачу информации между модулями 47 и 48 и протокол передачи данных. Вместо использования первого модуля 47 управления и второго модуля 48 управления, блок управления очевидным образом может быть реализован с использованием только одного модуля управления, или же может быть предусмотрено более двух модулей управления.
Дополнительный блок 28 управления соединен с первым модулем 47 управления шиной 32 передачи данных. Первый модуль 47 управления имеет вход для сигнала 33 давления от датчика 29 давления. Соответственно, второй модуль 48 управления имеет вход для сигнала 34 скорости вращения от датчика 30 скорости вращения, а дополнительный блок 28 управления имеет вход для сигнала 35 скорости вращения отдатчика 31 скорости вращения.
Узел 41 первого модуля 47 управления принимает сигнал 33 давления и направляет его в узел 42 второго модуля 48 управления. Узел 39 дополнительного блока управления 28 принимает сигнал 35 скорости вращения от датчика 31 скорости вращения и задает в нем отметку времени. Узел 39 направляет сигнал скорости вращения и отметку времени в узел 40 первого модуля 47 управления. Узел 40 принимает сигнал скорости вращения и отметку времени и направляет их в узел 42 второго модуля 48 управления.
Таким образом, узел 42 второго модуля 48 управления принимает информацию от узлов 40 и 41 и направляет ее в узел 43. Узел 43 учитывает действие приводной силовой передачи 21, т.е. преобразует значение сигнала 35 скорости вращения от датчика 31 скорости вращения, сравниваемого с сигналом 34 скорости вращения от датчика 30 скорости вращения. Узел 43 направляет информацию в логический узел 44.
Логический узел 44 принимает информацию от узла 43. Кроме того, логический узел 44 принимает сигнал 34 скорости вращения от датчика 30 скорости вращения. Логический узел 44 сравнивает значение сигнала 33 давления с нижним пороговым значением и, если значение ниже указанного нижнего порогового значения, выдает управляющую команду узлу 45 первого модуля 47 управления. Кроме того, логический узел 44 сравнивает значение сигнала 34 скорости вращения от датчика 30 скорости вращения с сопоставляемым значением 35 сигнала скорости вращения от датчика 31 скорости вращения, и если данные значения слишком сильно отличаются друг от друга, выдает управляющую команду узлу 45 первого модуля 47 управления. Значения могут быть определены как отличающиеся друг от друга слишком сильно, если расхождение между значениями составляет более 3% от номинального максимального значения скорости вращения двигателя. Если номинальное максимальное значение для двигателя составляет, например, 4500 об/мин, то значение, указывающее на неисправность, может составлять, например, 200 об/мин.
Таким образом, узел 45 первого модуля 47 управления принимает управляющую команду от логического узла 44. Узел 45 направляет данную команду управления узлу 46 дополнительного блока 28 управления.
Узел 46 дополнительного блока 28 управления принимает управляющую команду и формирует сигнал 36 управления тормозами и управляющий сигнал 38 устройства сигнализации. Узел 46 отправляет сигнал 36 управления тормозами через выход для сигнала управления тормозами на тормоза 25, и управляющий сигнал 38 устройства сигнализации через выход для управляющего сигнала устройства сигнализации на устройство 37 сигнализации.
Систему управления, описанную со ссылкой на фиг.4, можно также назвать автоматической системой управления тормозами. Согласно одному из вариантов изобретения, если устройство 37 сигнализации представляет собой индикаторную лампочку, такую как светодиодная лампочка, то управляющий сигнал 38 устройства сигнализации может управлять индикаторной лампочкой так, чтобы она была постоянно включена, когда система эксплуатируется и работает исправно. Когда система не эксплуатируется или имеет неисправность, управляющий сигнал 38 устройства сигнализации может управлять индикаторной лампочкой так, чтобы она была выключена. Когда система выдает сигнал 36 управления тормозами для управления тормозами 25, управляющий сигнал 38 устройства сигнализации может управлять индикаторной лампочкой так, чтобы она мигала.
Блок 26 управления, показанный на фиг.4, может содержать дополнительный блок 28 управления, первый модуль 47 управления и второй модуль 48 управления в качестве частей оборудования. Дополнительный блок 28 управления принимает импульсы/сигнал датчика от средств 13 перемещения и управляет активацией тормозов 25 и устройства 37 сигнализации. Дополнительный блок 28 управления связан с первым модулем 47 управления. Первый модуль 47 управления передает информацию/сообщения между дополнительным блоком 28 управления и вторым модулем 48 управления. Второй модуль 48 управления содержит операционную логику, которая сравнивает исходные данные, делает выводы и на их основании определяет управляющие команды.
Раскрытая в настоящем документе автоматическая система управления тормозами может быть модернизирована для случая уже имеющейся известной рабочей машины 1. Очевидно, что имеющаяся рабочая машина 1 может быть оснащена первым модулем 47 управления, вторым модулем 48 управления, датчиком 29 давления, датчиком 30 приводного двигателя 20 и тормозами 25. При модернизации, единственными физическими устройствами, которые должны быть установлены в рабочей машине 1, являются датчик 15, связанный со средствами 13 перемещения, устройство 37 сигнализации и дополнительный блок 28 управления. Дополнительно, в блоке 26 управления нужно выполнить требуемые изменения компьютерной программы.
Компьютерный программный продукт, предусмотренный в блоке 26 управления, содержит компьютерно-читаемый программный код, предназначенный для реализации функций предложенной автоматической системы управления тормозами или этапов способа, осуществляющих данные функции, по мере выполнения программного кода процессором. Блок 26 управления содержит средства обработки или процессор. Блок 26 управления может содержать память, в которой информация уже собрана и сохранена, а также собирается и сохраняется. Средства обработки могут быть выполнены с возможностью осуществления по меньшей мере части этапов процесса и/или операций, раскрытых в настоящем описании. В одном из вариантов изобретения средства обработки могут быть выполнены с возможностью приема и отправки информации и команд. Например, средства обработки могут содержать программируемую логику и/или программируемый микропроцессор. Средства обработки могут образовывать блок 26 управления или его часть.
Один из вариантов изобретения предлагает компьютерную программу, содержащую программный код, который, при его исполнении на компьютере, выполняет функции в соответствии с любым из вариантов, раскрытых выше. Компьютерная программа может быть включена в компьютерно-читаемый носитель информации, например, в долговременную память.
Один из вариантов изобретения предлагает компьютерный программный продукт, содержащий компьютерную программу для выполнения функций согласно любому из вариантов, раскрытых выше.
В одном из вариантов изобретения устройство включает в себя средства обработки, обеспечивающие выполнение раскрытых выше функций. Средства обработки могут служить компьютером для выполнения программного кода. Средства обработки могут содержать по меньшей мере один процессор, память и программную платформу, способные выполнять программный код.
Варианты изобретения могут быть реализованы в виде компьютерного процесса, определяемого компьютерной программой. Компьютерная программа может быть в формате исходного кода, формате объектного кода или в промежуточном формате, при этом компьютерная программа может быть сохранена на носителе данных, который может быть любым элементом или устройством, способным хранить компьютерную программу. Например, компьютерная программа может храниться на дистрибутивном носителе компьютерных программ, который может читаться компьютером или процессором. Дистрибутивный носитель компьютерных программ может включать в себя носитель данных, компьютерную память, постоянное запоминающее устройство (ПЗУ), электрическую несущую волну, телекоммуникационный сигнал и дистрибутивный пакет программного обеспечения.
В одном из вариантов изобретения, компьютерный программный продукт может храниться на компьютерно-читаемом носителе и исполняться процессором, при этом компьютерный программный продукт может содержать компьютерно-читаемый программный код. Такой тип программного продукта может быть выполнен для осуществления по меньшей мере некоторых этапов раскрытого выше способа, когда программный код выполняется в процессоре.
Компьютерная программа, выполняемая в блоке 26 управления, имеет естественные задержки, вызванные выполнением этапов программы и перенаправлением информации. На скорость работы влияют скорость процессора и другие характеристики оборудования. Дополнительные задержки могут быть обусловлены показателями надежности. Несмотря на это, предложенное техническое решение позволяет для управления тормозом 25 выдавать команду управления менее чем за 1 секунду с момента возникновения ситуации неисправности. Согласно одному из вариантов изобретения, рабочая задержка системы управления составляет менее 600 мс, предпочтительно - менее 400 мс.
В связи с показателями надежности может быть определено по меньшей мере одно из следующих условий. Для разницы между датчиками скорости вращения задается конкретный допустимый предел, и при превышении этого предела определяется ситуация неисправности. Кроме того, может быть задано так, что для установления ситуации неисправности должно произойти некоторое количество ситуаций с превышением значения или должно быть получено некоторое количество сообщений об ошибках. Например, при запуске может быть определено, что рабочие условия силового блока 17 должны выполняться в течение некоторого множества успешных раундов вычисления, прежде чем можно будет определить ситуацию неисправности для низкого давления подачи. Таким образом, гарантируется, что уровень давления имеет достаточно времени для повышения при запуске, например, дизельного двигателя.
Специалистам в данной области техники будет очевидно, что по мере развития технологий основная идея изобретения может быть реализована различными способами. Однако, изобретение и его варианты осуществления не ограничиваются раскрытыми выше примерами, а могут варьироваться в пределах объема правовой охраны, определяемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОХОДНАЯ МАШИНА ДЛЯ ОБРАБОТКИ АЛЮМИНИЕВЫХ ЭЛЕКТРОЛИЗЕРОВ | 2015 |
|
RU2593251C1 |
| САМОХОДНАЯ МАШИНА С ОБЪЕМНОЙ ГИДРОПЕРЕДАЧЕЙ | 2002 |
|
RU2241609C2 |
| САМОХОДНЫЙ РАБОЧИЙ АГРЕГАТ | 1998 |
|
RU2240674C2 |
| САМОХОДНАЯ УБОРОЧНАЯ МАШИНА И СПОСОБ УПРАВЛЕНИЯ САМОХОДНОЙ УБОРОЧНОЙ МАШИНОЙ | 2014 |
|
RU2638189C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ САМОХОДНОЙ МАШИНЫ | 2017 |
|
RU2643903C1 |
| Самоходная машина (варианты) | 2023 |
|
RU2841418C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ САМОХОДНОЙ МАШИНЫ С ДВИГАТЕЛЕМ ВНУТРЕННЕГО СГОРАНИЯ | 2018 |
|
RU2688563C1 |
| САМОХОДНАЯ МАШИНА С ЭЛЕКТРИЧЕСКОЙ СИСТЕМОЙ ПРИВОДА | 2019 |
|
RU2715820C1 |
| САМОХОДНАЯ РАБОЧАЯ МАШИНА С ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ | 2013 |
|
RU2540679C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ НАМАТЫВАНИЕМ И РАЗМАТЫВАНИЕМ КАБЕЛЯ В ТРАНСПОРТНОМ СРЕДСТВЕ С ЭЛЕКТРИЧЕСКИМ ПРИВОДОМ | 1997 |
|
RU2188489C2 |
Изобретение относится к самоходным рабочим машинам. Самоходная рабочая машина содержит корпус, средства перемещения, систему гидравлической силовой передачи, приводной двигатель, приводную силовую передачу между приводным двигателем и средствами перемещения, тормозную систему, средства контроля уровня давления насоса системы силовой передачи, средства контроля скорости вращения вала приводного двигателя, средства контроля вращения средств перемещения и блок управления. Блок управления обнаруживает первую ситуацию неисправности путем сравнения уровня давления насоса системы гидравлической силовой передачи с нижним пороговым значением и/или обнаруживает вторую ситуацию неисправности путем сравнения скорости вращения вала приводного двигателя с вращением средств перемещения. При этом блок управления управляет тормозной системой, в ответ на обнаружение первой и/или второй ситуации неисправности. Решение направлено на совершенствование рабочей машины. 4 н. и 17 з.п. ф-лы, 4 ил.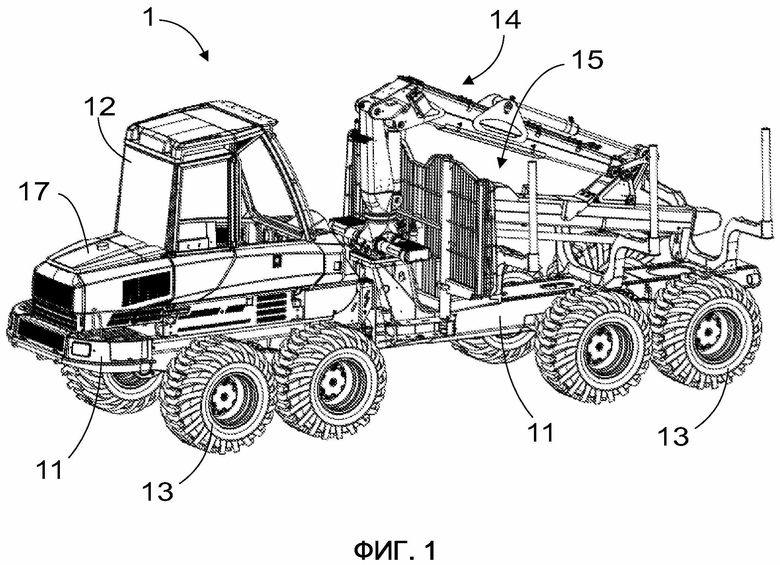
1. Самоходная рабочая машина (1), содержащая: корпус (11),
средства (13)
перемещения,
систему гидравлической силовой передачи,
приводной двигатель (20),
приводную силовую передачу (21) между приводным двигателем (20) и средствами (13) перемещения,
тормозную систему,
средства контроля уровня давления насоса системы силовой передачи,
средства контроля скорости вращения вала приводного двигателя (20),
средства контроля вращения средств (13) перемещения,
и блок управления (26),
причем блок (26) управления выполнен с возможностью обнаружения первой ситуации неисправности путем сравнения уровня давления насоса системы гидравлической силовой передачи с нижним пороговым значением и/или выполнен с возможностью обнаружения второй ситуации неисправности путем сравнения скорости вращения вала приводного двигателя (20) с вращением средств перемещения, при этом блок управления (26) выполнен с возможностью управления тормозной системой, в ответ на обнаружение первой и/или второй ситуации неисправности, чтобы обеспечивать торможение.
2. Рабочая машина по п.1, в которой система гидравлической силовой передачи содержит подающий насос (18) и гидравлический приводной двигатель (20), а также, предпочтительно, приводной насос, причем приводной двигатель (20) является гидромотором, при этом рабочая машина (1) содержит датчик (29) давления, выполненный с возможностью отслеживания уровня давления насоса гидравлической силовой передачи.
3. Рабочая машина по любому из предшествующих пунктов, в которой средства контроля скорости вращения вала приводного двигателя (20) содержат датчик (30) скорости вращения, выполненный с возможностью отслеживания вращения приводного двигателя (20).
4. Рабочая машина по любому из предшествующих пунктов, в которой средства контроля вращения средств (13) перемещения содержат датчик (31) скорости вращения.
5. Рабочая машина по п.4, в которой датчик (31) скорости вращения, контролирующий вращение средств (13) перемещения, выполнен с возможностью отслеживания вращения непосредственно средств (13) перемещения или отслеживания вращения компонента, непосредственно с ними связанного.
6. Рабочая машина по п.5, в которой датчик (31) скорости вращения, контролирующий вращение средств (13) перемещения, выполнен с возможностью отслеживания вращения шестерни дифференциала.
7. Рабочая машина по любому из предшествующих пунктов, в которой тормозная система включает в себя рабочий тормоз и стояночный тормоз, при этом блок (26) управления выполнен с возможностью управления по меньшей мере стояночным тормозом в ответ на обнаружение первой и/или второй ситуации неисправности.
8. Рабочая машина по любому из предшествующих пунктов, содержащая датчик, контролирующий, находится ли рабочая машина (1) на склоне, при этом блок управления (26) выполнен с возможностью управления тормозной системой, чтобы обеспечивать торможение в ответ на обнаружение первой и/или второй ситуации неисправности, только если указанный датчик обнаружил, что рабочая машина (1) находится на склоне.
9. Рабочая машина по любому из предшествующих пунктов, представляющая собой лесозаготовительный агрегат.
10. Система управления самоходной рабочей машиной, включающая в себя:
средства контроля уровня давления насоса системы гидравлической силовой передачи рабочей машины (1),
средства контроля скорости вращения вала приводного двигателя (20) рабочей машины (1),
средства контроля вращения средств (13) перемещения рабочей машины (1),
блок управления (26),
причем блок (26) управления выполнен с возможностью обнаружения первой ситуации неисправности путем сравнения уровня давления насоса системы гидравлической силовой передачи с нижним пороговым значением и/или выполнен с возможностью обнаружения второй ситуации неисправности путем сравнения скорости вращения вала приводного двигателя (20) с вращением средств перемещения, при этом блок (26) управления выполнен с возможностью выдавать управляющую команду тормозной системе рабочей машины (1) в ответ на обнаружение первой и/или второй ситуации неисправности.
11. Система управления по п.10, в которой средства контроля уровня давления насоса системы гидравлической силовой передачи рабочей машины (1) содержат датчик (29) давления.
12. Система управления по п.10 или 11, в которой средства контроля скорости вращения вала приводного двигателя (20) содержат датчик (30) скорости вращения, выполненный с возможностью отслеживания вращения приводного двигателя (20).
13. Система управления по любому из пп.10-12, в которой средства контроля вращения средств (13) перемещения содержат датчик (31) скорости вращения.
14. Система управления по п.13, в которой датчик (31) скорости вращения, контролирующий вращение средств (13) перемещения выполнен с возможностью отслеживания вращения непосредственно средств (13) перемещения или отслеживания вращения компонента, непосредственно с ними связанного.
15. Система управления по п.14, в которой датчик (31) скорости вращения, контролирующий вращение средств (13) перемещения, выполнен с возможностью отслеживания вращения шестерни дифференциала.
16. Способ управления самоходной машиной, содержащий следующие этапы:
отслеживание уровня давления насоса системы гидравлической силовой передачи рабочей машины (1),
отслеживание скорости вращения вала приводного двигателя (20) рабочей машины (1),
отслеживание вращения средств (13) перемещения рабочей машины (1), сравнение уровня давления насоса системы гидравлической силовой передачи с нижним пороговым значением для обнаружения первой ситуации неисправности и/или сравнение скорости вращения вала приводного двигателя (20) с вращением средств (13) перемещения для обнаружения второй ситуации неисправности,
и в ответ на обнаружение первой и/или второй ситуации неисправности, управление тормозной системой рабочей машины (1) с обеспечением торможения.
17. Способ по п.16, в котором скорость вращения вала приводного двигателя (20) отслеживают датчиком (30) скорости вращения, посредством которого контролируют вращение приводного двигателя (20).
18. Способ по любому из пп.16, 17, в котором скорость вращения средств (13) перемещения отслеживают датчиком (31) скорости вращения.
19. Способ по п.18, в котором датчик (31) скорости вращения, отслеживающий вращение средств (13) перемещения, контролирует вращение непосредственно средств (13) перемещения или вращение компонента, непосредственно с ними связанного.
20. Способ по п.19, в котором датчик (31) скорости вращения, контролирующий вращение средства (13) перемещения, отслеживает вращение шестерни дифференциала.
21. Компьютерно-читаемый носитель с хранящимся на нем компьютерным программным продуктом, исполняемым процессором, причем компьютерный программный продукт содержит компьютерно-читаемый программный код, который организован для выполнения указанных шагов способа по любому из пп.16-20, когда программный код выполняется процессором.
| Вакуумный механический насос | 1986 |
|
SU1361378A1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ С ГИДРОСТАТИЧЕСКИМ ПРИВОДОМ | 2008 |
|
RU2491192C2 |
| US 2018065629 A1, 08.03.2018 | |||
| Гребное устройство для передвижения лодок по воде | 1932 |
|
SU32946A1 |
| Воздухоподогреватель для паровых котлов и нагревательных печей | 1926 |
|
SU4435A1 |

