Изобретение относится к области железнодорожной автоматики и телемеханики и может быть использовано в устройствах контроля за управлением локомотивом в режиме автоматического управления поездом и может быть использована для сокращения интервалов попутного следования между поездами, следующими друг за другом.
В качестве наиболее близкого аналога выбранасистема контроля за управлением локомотивом и бдительностью машиниста, содержащая межмодульный интерфейс, усилитель электропневматического клапана, безопасную схему контроля, модули центральной обработки информации, два модуля измерения параметров движения, блок датчиков пути и скорости, два модуля непрерывных каналов внешних устройств, приемные катушки АЛСН и АЛС-ЕН, модуль маршрута, приемник спутниковой навигации, модуль радиоканала, радиомодем, блок кодирования/декодирования сообщений, блок контроля бдительности, блок интерфейса машиниста, рукоятку бдительности, блок поддержки беспилотного режима ведения поезда, состоящий из подключенных к внутреннему интерфейсу связи двух блоков датчиков обнаружения и позиционирования препятствий на пути перед поездом, и модуля памяти с записанной в нем базой данных актуальной истории движения по маршрутам следования поезда, процессоры обработки паттернов сигналов, отраженных от возможных препятствий и от выделенных объектов придорожной инфраструктуры, модули контролируемых искусственных нейронных сетей распознавания препятствий и паттернов эксплуатационных ситуаций по управлению движением поезда, модули жесткого логического контроля качества расчёта (RU2766936, B61L 25/04, 19.10.2021).
Недостатком аналога является отсутствие верификации работы модулей, контролируемых искусственных нейронных систем на предмет правильности обнаружения, определения координат обнаруженных объектов, находящихся на пути поезда, что в свою очередь значительно снижает функциональную безопасность устройства контроля за управлением локомотивом и поддержание безопасного интервала между поездами.
Технический результат представленного изобретения заключается в повышении уровня функциональной безопасности движения поездов и снижение человеческого фактора в беспилотных технологиях управления поездами, а также в уменьшении межпоездного интервала между попутно следующими поездами.
Технический результат в системе контроля за управлением локомотивов попутно следующих поездов,содержащей межмодульный интерфейс, усилитель электропневматического клапана, выход которого соединен с входом электропневматического клапана, а вход - с выходом безопасной схемы контроля, входы которой соединены с выходами двух модулей центральной обработки информации, которые соединены между собой и подключены к межмодульному интерфейсу, к которому подключены модули измерения параметров движения, соединенные с выходом блока датчиков пути и скорости, модули непрерывных каналов внешних устройств, подключенные к приемным катушками АЛСН и АЛС-ЕН, модуль радиоканала, соединенный с радиомодемом, блок контроля бдительности, подключенный к рукоятке бдительности машиниста, и модуль маршрута, входом соединенный с выходом приемника спутниковой навигации, другой выход которого подключен к входу блока кодирования/декодирования сообщений, вход/выход которого подключен к выходу/входу блока интерфейса машиниста, к которому подключена рукоятка бдительности, а другой вход/выход - к межмодульному интерфейсу, к которому посредством внутреннего интерфейса связи подключен блок поддержки беспилотного режима ведения поезда, содержащий модуль памятис записанной в нем базой данных актуальной истории движения по маршрутам следования поезда, подключенный входом/выходом к внутреннему интерфейсу связи, и два блока обнаружения препятствий, каждый из которых включает процессор, выходом/входом соединенный с входом/выходом модуля жесткого логического контроля качества расчёта, другой вход/выход которого подключен к внутреннему интерфейсу связи, достигается тем, что каждый блок обнаружения препятствий дополнительно включает блок технического зрения и модуль контроля эксплуатационных ситуаций по управлению движением поезда, который содержит последовательно соединенные модуль безопасного обнаружения объектов, модуль безопасного определения расстояния до обнаруженных объектов, модуль классификации обнаруженных объектов и модуль формирования решения и выдачи параметров обнаруженных объектов, подключенный ко второму выходу модуля безопасного определения расстояния до обнаруженных объектов, третий выход которого соединен с соответствующим входом модуля жесткого логического контроля качества расчёта, и модуль поиска реперных объектов в регионе нахождения поезда, выходом подключенный к другому входу модуля классификации обнаруженных объектов, при этом вход модуля безопасного обнаружения объектов соединен с выходом блока технического зрения, к первому входу/выходу которого подключен выход/вход процессора, а второй выход/вход к внутреннему интерфейсу, к которому подключены входы/выходы модуля формирования решения и выдачи параметров обнаруженных объектов и модуля поиска реперных объектов в регионе нахождения поезда.
Для подтверждения функциональной безопасности работы блока технического зрения в качестве реперных точек используются заранее известные стационарныеэлементы инфраструктуры данные о типе и месте расположения которых, содержаться в электронных картах.Факт обнаружения стационарных реперных объектов и сравнение измеренной средствами блока технического зрения скорости приближения к ним со скоростью движения локомотива, измеренной датчиками пути и скорости, позволяют провести верификацию функции обнаружения и скорости приближения к объектам находящихся на пути перед поездом, тем самым повысить уровень функциональной безопасности устройства обнаружения препятствий и обеспечить контроль за минимально допустимым интервалом между поездами попутного следования непосредственно во время движения поездов за счет возможности обнаружения опасных сближений поездов, а также недопустимых скоростных режимов движения поездов.
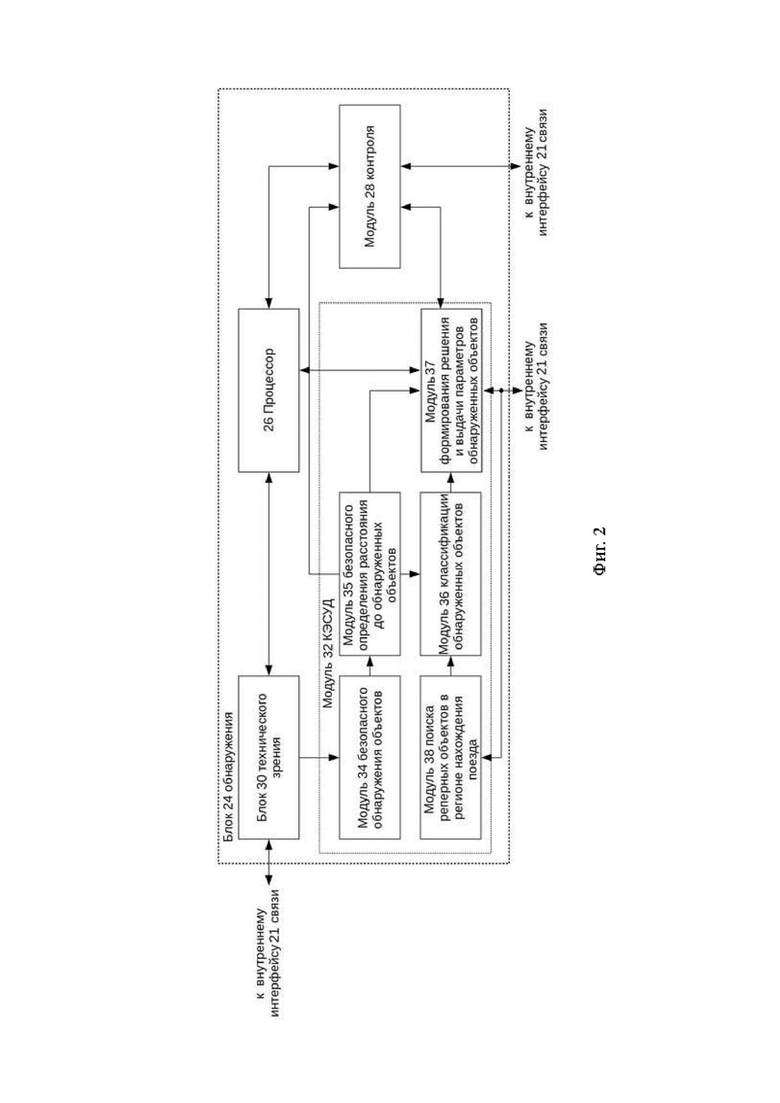
Сущность изобретения поясняется чертежами, где на фиг. 1 приведена структурная схема системы контроля за управлением локомотивов попутно следующих поездов; на фиг. 2 -структурная схема блока обнаружения препятствий.
Система контроля за управлением локомотивов попутно следующих поездов содержит межмодульный интерфейс 1, усилитель 2 электропневматического клапана, выход которого соединен с входом электропневматического клапана 3 (ЭПК3), а вход - с выходом безопасной схемы 4 контроля, входы которой соединены с выходами двух модулей 5 и 6 центральной обработки информации (МЦО5 и МЦО6), которые соединены между собой и подключены к межмодульному интерфейсу 1, к которому подключены два модуля 7 и 8 измерения параметров движения, входы которых соединены с выходом блока 9 датчиков пути и скорости, два модуля 10 и 11непрерывных каналов внешних устройств(модули 10ВУ и 11ВУ), подключенных к приемным катушкам 12 АЛСН и АЛС-ЕН, модуль 13 радиоканала, вход/выход которого соединен с радиомодемом 14, блок 15 контроля бдительности, подключенный к рукоятке 16 бдительности машиниста, и модуль 17 маршрута, входом соединенный с первым выходом приемника 18 спутниковой навигации, второй выход которого подключен к входу блока 19 кодирования/декодирования сообщений, один вход/выход которого подключен к выходу/входу блока 20 интерфейса машиниста, к которому подключена рукоятка 16 бдительности, а второй вход/выход - к межмодульному интерфейсу 1, к которому посредством внутреннего интерфейса 21 связи подключен блок 22 поддержки беспилотного режима ведения поезда, содержащий модуль 23 памяти с записанной в нем базой данных актуальной истории движения по маршрутам следования поезда, подключенный входом/выходом к внутреннему интерфейсу связи, и два блока 24 и 25 обнаружения препятствий, каждый из которых включает процессор 26(27), выходом/входом соединенный с входом/выходом модуля 28(29) жесткого логического контроля качества расчёта, другой вход/выход которого подключен к внутреннему интерфейсу 21, блок 30(31) технического зрения и модуль 32(33)контроля эксплуатационных ситуаций по управлению движением поезда (модули КЭСУД32 и КЭСУД33).
Каждый модуль КЭСУД32 и КЭСУД33 содержит последовательно соединенные модуль 34 безопасного обнаружения объектов, модуль 35 безопасного определения расстояния до обнаруженных объектов, модуль 36 классификации обнаруженных объектов и модуль 37 формирования решения и выдачи параметров обнаруженных объектов, подключенный ко второму выходу модуля 35 безопасного определения расстояния до обнаруженных объектов, третий выход которого соединен с соответствующим входом модуля 28 жесткого логического контроля качества расчёта, и модуль 38 поиска реперных объектов в регионе нахождения поезда, выходом подключенный к другому входу модуля 36 классификации обнаруженных объектов.
При этом вход модуля 34 безопасного обнаружения объектов соединен с выходом блока 30(31) технического зрения, к первому входу/выходу которого подключен выход/вход процессора 26(27), а второй выход/вход - к внутреннему интерфейсу 21, к которому подключены входы/выходы модуля 37 формирования решения и выдачи параметров обнаруженных объектов и модуля 38 поиска реперных объектов в регионе нахождения поезда.
Система контроля за управлением локомотивов попутно следующих поездовработает следующим образом.
Перед каждой поездкой в базы данных модуля 17 маршрута и в модуль 23 памяти заносят актуальные данные для управления движением поезда для каждой координаты маршрута движения поезда.
Сигналы АЛСН и АЛС-ЕН через приемные катушки 12, поступают в модули 10ВУ и 11ВУ и дешифрируются в блоке 19 кодирования/декодирования сообщений для отображения на индикаторе блока 20 интерфейса машиниста состояния впереди расположенных участков пути и показаний путевых светофоров, а также для сообщения машинисту допустимой скорости движения поезда. Величина допустимой скорости движения поступает в блок 20 из МЦО 5 и 6, где рассчитывается на основании данных от связанныхчерез межмодульный интерфейс 1 (например, типа CAN) модулей 10ВУ и 11ВУ.
Сигналы от блока 9 датчиков пути и скорости, связанных с колесами локомотива, поступают в модули 7 и 8 измерения параметров движения, в которых формируют значения фактической скорости и пройденного пути. Сигналы от приемника 18 спутниковой навигации через модуль 17 маршрута поступают в модули 7 и 8 измерения параметров движения, которые на основании этих сигналов и данных из электронной карты маршрута, хранящейся в модуле 17 маршрута, определяют местоположение поезда и расстояние до мест ограничения скорости. По этим данным МЦО 5 и 6 вычисляют скоростной режим движения поезда, сравнивают с допустимой скоростью и принимают, при необходимости, решения о режиме торможения.
Информация, касающаяся безопасности движения поезда, дублируется в МЦО 5 и 6 и циклически проверяется на соответствие безопасной схемой 4 контроля. При нарушении соответствия безопасная схема 4 контроля воздействует на усилитель 2 ЭПК 3 и, отключая питание ЭПК 3, обеспечивает экстренное торможение поезда. Если в МЦО 5 и 6 нет информации о получении разрешения проезда границы занятого участка пути, то после пересечения границы занятого участка пути с МЦО 5 и 6 на безопасную схему 4 контроля подают соответствующие воздействия, на основании которых усилитель 2 отключает питание ЭПК 3, вызывая тем самым экстренное торможение поезда.
В процессе движения поезда блок 15 контроля бдительности, через межмодульный интерфейс 1 и блок 19 кодирования/декодирования сообщений, выдает на блок 20 интерфейса машиниста сигнал на подтверждение бдительности. Машинист подтверждает свою бдительность нажатием рукоятки 16 бдительности, сигналы с выходов которой поступают на вход блока 15 контроля бдительности и на блок 20 интерфейса машиниста, который через блок 19 кодирования/декодирования сообщений и межмодульный интерфейс 1 передает эту информацию в МЦО 5 и 6. При отсутствии подтверждения бдительности безопасная схема 4 контроля воздействует на усилитель 2 ЭПК 3. При отключении питания ЭПК 3 происходит экстренное торможение поезда. В процессе управления поездом машинист запрашивает разрешение диспетчера на выполнение стандартных действий по управлению движением поезда в предусмотренных инструкциями ситуацияхпутем нажатия соответствующих клавиш функциональной клавиатуры, входящей в состав блока 20 интерфейса машиниста.
Радиосигналы через радиомодем 14 поступают в модуль 13 радиоканала, который выделяет из них кодированную цифровую информацию, передаваемую из диспетчерского центра управления движением. В обратном направлении в диспетчерский центр управления поступает кодированная информация, связанная с передачей параметров движения поезда и с запросами к поездному диспетчеру от машиниста поезда. В частности, при запросе от машиниста к поездному диспетчеру на разрешение проезда границы занятого путевого участка на первый вход блока 19 кодирования/декодирования сообщений, содержащего координатно-временную информацию, поступает команда от блока 20 интерфейса машиниста. По команде на втором входе блока 19кодирования/декодирования сообщений с выхода приемника 18 спутниковой навигации считывается координата и текущее время, соответствующие моменту нажатия клавиши функциональной клавиатуры. Они используются блоком 19 кодирования/декодирования сообщений как часть кодированного запроса, который блок 19 кодирования/декодирования сообщений формирует и через межмодульный интерфейс 1, модуль радиоканала 13 и радиомодем 14 передает в центр диспетчерского управления. При декодировании сообщения в аппаратуре центра диспетчерского управления эта часть информации сопоставляется с информацией о местонахождении поезда в текущий момент времени, получаемой от напольных устройств диспетчерской централизации (рельсовые цепи, счетчики осей, считыватели номеров вагонов и т.д.). Этим обеспечивается дополнительный контроль правильности приходящей с локомотива информации. При передаче команды разрешающей проследование границы занятого блок-участка координата и текущее время из запроса служит ключом для кодирования сообщения. Одновременно с разрешением на локомотив поступает информация о длительности периода времени, в течение которого разрешение действует. При этом отсчет времени производится от момента времени передачи исходного запроса с поезда. На локомотиве блок 19 кодирования/декодирования сообщений, содержащий координатно-временную информацию, получает сообщение от поездного диспетчера и использует координатно-временную информацию из исходного запроса в качестве ключа для декодирования ответа от диспетчера.
МЦО 5 и 6 определяют скорость сближения с препятствием, обнаруженным блоком 22 поддержки беспилотного режима, вид и поведение препятствия для отображения ситуации машинисту блоком 20 интерфейса машиниста. В зависимости от выбранных алгоритмов эти данные используются для информирования машиниста с проверкой его бдительности, например, посредством требований нажатия рукоятки 16 бдительности и/или для подачи предупредительных гудков и речевых и световых сигналов (или, например, специальных сигналов отпугивания крупных животных), и/или активизации средств предупреждения столкновения (подушки безопасности, выдвижные бамперы и т.д.), и/или автоматического экстренного торможения поезда. Аналогичные действия выполняются устройством автоматически при беспилотном режиме ведения поезда.
Блок 22 поддержки беспилотного режима ведения поезда автоматически распознает препятствия на пути движения поезда, в том числе, хвостовой вагон впереди идущего поезда, вычисляет их координаты и распознает эксплуатационные ситуации для выработки исторически оправданных режимов ведения, используя при этом данные хранящиеся в модуле 23 памяти, в котором записана база данных актуальной истории движения по маршрутам следования поезда.
Процессоры 26 и 27 в соответствующих блоках 24 и 25 обнаружения препятствийблока 22 поддержки беспилотного режима ведения поезда управляют работой блоков 30 и 31 технического зрения, обеспечивающих первичное обнаружение и классификацию объектов, находящихся по пути следования поезда, а также модулей 32 КЭСУД и 33 КЭСУД и модулей 28, 29 жесткого логического контроля качества расчёта КЭСУД, а также управляют обменом информацией этих модулей с соответствующими МЦО 5 и 6, модулями 7 и 8 измерения параметров движения и приемником 18 спутниковой навигациичерез модуль 17 маршрута.
В модулях 32 и 33 КЭСУД на основе данных соответственно блоков 30 и 31 технического зрения модуль 34 безопасного обнаружения объектов обеспечивает безопасное обнаружение всех объектов, находящихся на пути следования поезда, с вероятностью опасного отказа (пропуска) РОБН, модуль 35 безопасного определения расстояния до обнаруженных объектов обеспечивает измерение расстояния от локомотива до обнаруженных объектов с вероятностью опасного отказа (занижения расстояния) РДИСТ, модуль 36 классификации обнаружения объектов на основании данных, поступающих из модуля 38 поиска реперных объектов в регионе нахождения поезда, где на основании данных хранящихся в модуле 23 памяти и данных модуля 17 маршрута и текущего местоположения поезда выделяются данные об объектах инфраструктуры, которые в данный момент должны быть обнаружены блоком 22 поддержки беспилотного режима, обеспечивает безопасную классификацию обнаруженных объектов на стационарные объекты инфраструктуры и потенциально опасные объекты, в том числе находящиеся в колее перед поездом с вероятностью опасного отказа РКЛАСС, модуль 37 формирования решения и выдачи параметров обнаруженных объектов по расписанию или по запросу в зависимости от выбранного режима работы, но не реже заданного промежутка времени, например, каждые 0.25 сек, выдает пакеты цифровых данных с результатами своей работы, содержащие для каждого обнаруженного объекта его классификационный признак, координаты, расстояние и прогнозируемые значения скорости и ускорения относительно локомотива, измеренные с вероятностью опасного отказа (занижения скорости) РСКОР для дальнейшего использования в модулях 5 и 6 центральной обработки информации. Модули 32 и 33 КЭСУД выдают данные только при условии разрешений от соответствующих модулей 28 и 29 жесткого логического контроля качества расчёта КЭСУД.
Модули 28 и 29 каждый раз перед выдачей разрешений на передачу данных соответственно модулям 32 и 33 КЭСУД проверяют факт обнаружения стационарных объектов инфраструктуры в районе нахождения поезда, осуществляют сопоставление обнаруженных объектов и объектов, отмеченных на маршрутных картах хранящихся в модуле 23, с учетом текущего положениялокомотива поезда,которое получают через модуль 17 маршрута из приемника 18 спутниковой навигации, тем самым подтверждая вероятность опасных отказов при обнаружении РОБН; правильность классификации обнаруженного объекта, подтверждая тем самым вероятность опасного отказа РКЛАСС; координаты обнаруженных стационарных объектов инфраструктуры, полученные на основе известных координат поезда (совокупные данные модулей 17 маршрута и 7 (8) измерения параметров движения) и определенного в модулях 32 и 33 КСЭУД расстояний до обнаруженных стационарных объектов инфраструктуры с координатами хранящимися в модуле 23, тем самым подтверждая вероятность опасных отказов измерения расстояния до обнаруженных объектов РДИСТ; скорость сближения с обнаруженными стационарными объектами инфраструктуры, вычисленную как приращение измеренного в блоках 30 и 31 технического зрения расстояния до обнаруженных стационарных объектов инфраструктуры за элементарный промежуток времени (цикл повторного обнаружения) со скоростью полученной в модулях 7 и 8 измерения параметров движения, тем самым подтверждая вероятность опасных отказов определения скорости сближения с обнаруженными объектами РСКОР. Реализуемые в блоках 30 и 31технического зрения физические источники информации (каналы обнаружения), алгоритмы обнаружения и измерения координатдля повышения функциональной безопасности являются разнымии выполнены максимально независимыми друг от друга, это позволяет на выходе снизить вероятность опасных отказов обнаружения опасных объектов, находящихся на пути поезда, до требований полнотыбезопасности на уровне SIL4 (РΣ= f28(РОБН;РКЛАСС;РДИСТ;РСКОР)×f29(РОБН;РКЛАСС;РДИСТ;РСКОР).
Если пакеты данных, полученные модулями 5 и 6 центральной обработки информации из блока 22 поддержки беспилотного режима, проходят проверку на совпадение безопасной схемой 4 контроля, то полученная от блока 22 модулями 5 и 6 информация используется для управления движением поезда, а если не проходят проверку, то эта информация отклоняется.
В беспилотном режиме ведения поезда, в процессе работы блока 22, модули 32 и 33 КЭСУД выдают результаты своей работы для дальнейшего использования в МЦО 5 и 6 с добавлением проверочной информации от соответствующих модулей 28, 29. Эти данные синхронно запрашиваются из блока 22 поддержки беспилотного режима ведения поезда МЦО 5 и 6, например, не реже чем каждые 0.25 сек. По этим запросам результаты работы модулей в блоке 22 поддержки беспилотного режима ведения поезда синхронно передаются в интерфейс 1 в виде кодовых векторов, содержащих рабочую и контрольную информацию. Алгоритмы обработки информации процессорами 26 и 27 также, как и структуры и алгоритмы работы управляемых ими модулей28-31и используемые ими данные из базы данных модуля 23 памяти, для достижения требований полноты безопасности (функциональной безопасности) выполнены максимально различными и не зависимыми друг от друга на всех программных и аппаратных путях преобразования их к конечному результату, являются разными и максимально независимыми друг от друга. Это обеспечивает возможность до синхронной проверки полного совпадения этих векторов МЦО 5 и 6 вместе с безопасной схемой 4 контроляснизить вероятность одинаковых ошибок в каналах обработки информации, вызывающих опасные отказы. Только конечные результаты работы блока 22, передаваемые в МЦО 5 и 6 для возможности проверки на совпадение безопасной схемой 4 контроля, приводятся к сопоставимому виду.
После синхронной проверки полного совпадения этих данных они в каждом очередном цикле между проверками независимо могут использоваться МЦО 5 и 6 для решения задач беспилотного режима ведения поезда.
Таким образом, предлагаемое изобретение позволит повысить функциональную безопасность системы контроля за управлением локомотивами попутно следующих поездов и обеспечить непосредственно во время движения поездов контроль за интервалом между попутно следующих поездов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство контроля за управлением локомотивом и бдительностью машиниста | 2021 |
|
RU2766936C1 |
| Устройство контроля за управлением локомотивом | 2022 |
|
RU2790738C1 |
| Система управления движением поездов в режиме виртуальной сцепки | 2024 |
|
RU2828911C1 |
| КОМПЛЕКСНОЕ ЛОКОМОТИВНОЕ УСТРОЙСТВО БЕЗОПАСНОСТИ УНИФИЦИРОВАННОЕ (КЛУБ-У) | 2003 |
|
RU2248899C1 |
| Система обеспечения безопасности на железнодорожном транспорте | 2020 |
|
RU2761763C1 |
| УСТРОЙСТВО КОНТРОЛЯ ЗА УПРАВЛЕНИЕМ ЛОКОМОТИВОМ И БДИТЕЛЬНОСТЬЮ МАШИНИСТА | 2003 |
|
RU2262459C2 |
| УСТРОЙСТВО КОНТРОЛЯ ЗА УПРАВЛЕНИЕМ ПОЕЗДА И БДИТЕЛЬНОСТЬЮ МАШИНИСТА | 2009 |
|
RU2423269C1 |
| Способ управления рельсовым транспортным средством и система для его реализации | 2024 |
|
RU2830326C1 |
| Устройство контроля за управлением поезда и бдительностью машиниста | 2019 |
|
RU2718621C1 |
| УСТРОЙСТВО КОНТРОЛЯ ЗА УПРАВЛЕНИЕМ ПОЕЗДА И БДИТЕЛЬНОСТЬЮ МАШИНИСТА | 2011 |
|
RU2499713C2 |

Изобретение относится к средствам контроля за управлением локомотивов попутно следующих поездов. Система содержит межмодульный интерфейс 1, усилитель 2 электропневматического клапана, электропневматический клапан 3, безопасную схему 4 контроля, два модуля 5 и 6 центральной обработки информации, два модуля 7 и 8 измерения параметров движения, блок 9 датчиков пути и скорости, два модуля 10 и 11 непрерывных каналов внешних устройств, приемные катушки 12 АЛСН и АЛС-ЕН, модуль 13 радиоканала, радиомодем 14, блок 15 контроля бдительности, рукоятку 16 бдительности машиниста, модуль 17 маршрута, приемник 18 спутниковой навигации, блок 19 кодирования/декодирования сообщений, блок 20 интерфейса машиниста, внутренний интерфейса 21 связи, блок 22 поддержки беспилотного режима ведения поезда, содержащий модуль 23 памяти с записанной в нем базой данных актуальной истории движения по маршрутам следования поезда, и два блока 24 и 25 обнаружения препятствий, каждый из которых включает процессор 26 (27), модуль 28 (29) жесткого логического контроля качества расчёта, блок 30 (31) технического зрения и модуль 32 (33) контроля эксплуатационных ситуаций по управлению движением поезда. При этом каждый модуль КЭСУД 32 и КЭСУД 33 содержит модуль 34 безопасного обнаружения объектов, модуль 35 безопасного определения расстояния до обнаруженных объектов, модуль 36 классификации обнаруженных объектов и модуль 37 формирования решения и выдачи параметров обнаруженных объектов, и модуль 38 поиска реперных объектов в регионе нахождения поезда. Достигается повышение уровня безопасности движения поездов. 2 ил.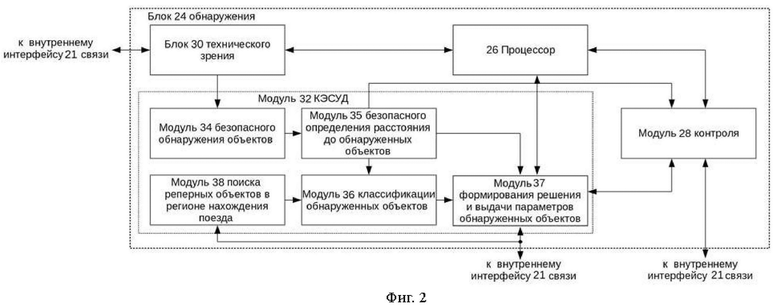
Система контроля за управлением локомотивов, содержащая межмодульный интерфейс, усилитель электропневматического клапана, выход которого соединен с входом электропневматического клапана, а вход - с выходом безопасной схемы контроля, входы которой соединены с выходами двух модулей центральной обработки информации, которые соединены между собой и подключены к межмодульному интерфейсу, к которому подключены модули измерения параметров движения, соединенные с выходом блока датчиков пути и скорости, модули непрерывных каналов внешних устройств, подключенные к приемным катушками АЛСН и АЛС-ЕН, модуль радиоканала, соединенный с радиомодемом, блок контроля бдительности, подключенный к рукоятке бдительности машиниста, и модуль маршрута, входом соединенный с выходом приемника спутниковой навигации, другой выход которого подключен к входу блока кодирования/декодирования сообщений, вход/выход которого подключен к выходу/входу блока интерфейса машиниста, к которому подключена рукоятка бдительности, а другой вход/выход - к межмодульному интерфейсу, к которому посредством внутреннего интерфейса связи подключен блок поддержки беспилотного режима ведения поезда, содержащий модуль памяти с записанной в нем базой данных актуальной истории движения по маршрутам следования поезда, подключенный входом/выходом к внутреннему интерфейсу связи, и два блока обнаружения препятствий, каждый из которых включает процессор, выходом/входом соединенный с входом/выходом модуля жесткого логического контроля качества расчёта, другой вход/выход которого подключен к внутреннему интерфейсу связи, отличающаяся тем, что каждый блок обнаружения препятствий дополнительно включает блок технического зрения и модуль контроля эксплуатационных ситуаций по управлению движением поезда, который содержит последовательно соединенные модуль безопасного обнаружения объектов, модуль безопасного определения расстояния до обнаруженных объектов, модуль классификации обнаруженных объектов и модуль формирования решения и выдачи параметров обнаруженных объектов, подключенный ко второму выходу модуля безопасного определения расстояния до обнаруженных объектов, третий выход которого соединен с соответствующим входом модуля жесткого логического контроля качества расчёта, и модуль поиска реперных объектов в регионе нахождения поезда, выходом подключенный к другому входу модуля классификации обнаруженных объектов, при этом вход модуля безопасного обнаружения объектов соединен с выходом блока технического зрения, к первому входу/выходу которого подключен выход/вход процессора, а второй выход/вход к внутреннему интерфейсу, к которому подключены входы/выходы модуля формирования решения и выдачи параметров обнаруженных объектов и модуля поиска реперных объектов в регионе нахождения поезда.
| Устройство контроля за управлением локомотивом и бдительностью машиниста | 2021 |
|
RU2766936C1 |
| WO 2018104454 A2, 14,06.2018 | |||
| Способ термической обработки антрацитов | 1933 |
|
SU42033A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО МОНИТОРИНГА СООТВЕТСТВИЯ СИГНАЛОВ И АВАРИЙНОГО ОПОВЕЩЕНИЯ | 2020 |
|
RU2812263C2 |
| EA 42050 B1, 29.12.2022 | |||
| WO 2018104462 A1, 14.06.2018 | |||
| CN 109664923 A, 23.04.2019. | |||

