112
Изобретение относится к техническим средствам контроля остойчивости
и прочности судна.
Наиболее близкой по технической сущности к предлагаемой является система для контроля мореходных характеристик судна, содержащая датчики осадки, датчики угла крена, подсистему напряжения, соединенную с блоком управления, который через блок питания соединен с вычисли- тельнь№1 блоком 1 j .
Однако использование в системе специального кренящего танка постоянного объема, дающего постоянный
кренящий момент, ведет к тому-, что
при малой остойчивости судна запрессовка ведет к значительному крену судна, не приемлемому для практики, а при большой остойчивости судна
запрессоика танка ие дает необходи- MOi o накреиения судна, что ведет к увеличению погрешности при определении метацентрической высоты, Из-зй низкого быстродействия система неудобна в эксплуатации. Подготовка системы к измере1П1ям занимает 30 мин, измерения 15-20 мин (при обсчете 100 ординат) или 40-45 мип (при обсчете 1000 ординат). При использовании кренования в море точность определения водоизмещения низкая, что объясняется тем, что в .системе не предусмотрена компенсация напоров воды и при этом уровень воды в измерительных трубах носового и кормового осадкомеров па ходу судна отличается на 18-20 см при одной и той же осадке. Кроме скорости судна уровень в измерительных трубах является функцией других переменных величин (дифферента, глубины погружения, места установки трубы), неучет которых ведет к увеличению погрешности измерения осадки. Кроме того, в системе,отсутствует возможность контроля общей прочности.
Целью изобретения является повышение точности измерения, увеличение быстродействия, расширение функциональных возможностей.
Указанная цель достигается тем, что система для контроля мореходных характеристик судна, содержащая датчики осадки, датчики угла крена, . подсистему пакренения, соединенную с блоком управления, который через блок питания соединен с вычислитель6 2
ным блоком, снабжена датчиками напряжения, датчиками температуры воды и корпуса судна, датчиками контроля судовых запасов, двумя задаю щими блоками, блоком временр и блоком сравнения, формирователем сигналов, cpeдинeнныIv через интерфейс ввода-вывода с вычислительным блоком, причем первые выходы датчиков
осадки, выходы датчиков угла крена, напряжения температуры воды и корпуса-судна, контроля судовых запасов соединены с входами формирователя сигналов, а вторые выходы осадки соединены через блок сравнения и блок времени с блоком управления, второй вход блока сравнения соединен с первым задающим блоком, а второй задающий блок через датчик угла крена соединен с подсистемой накренения.
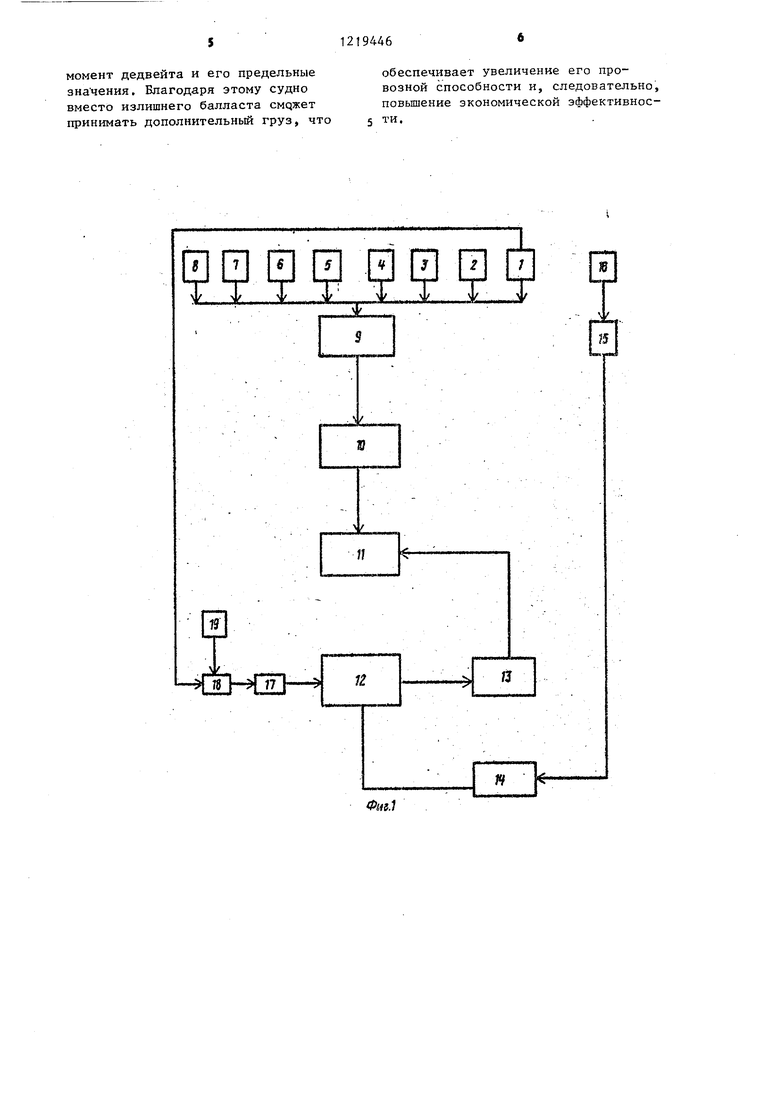
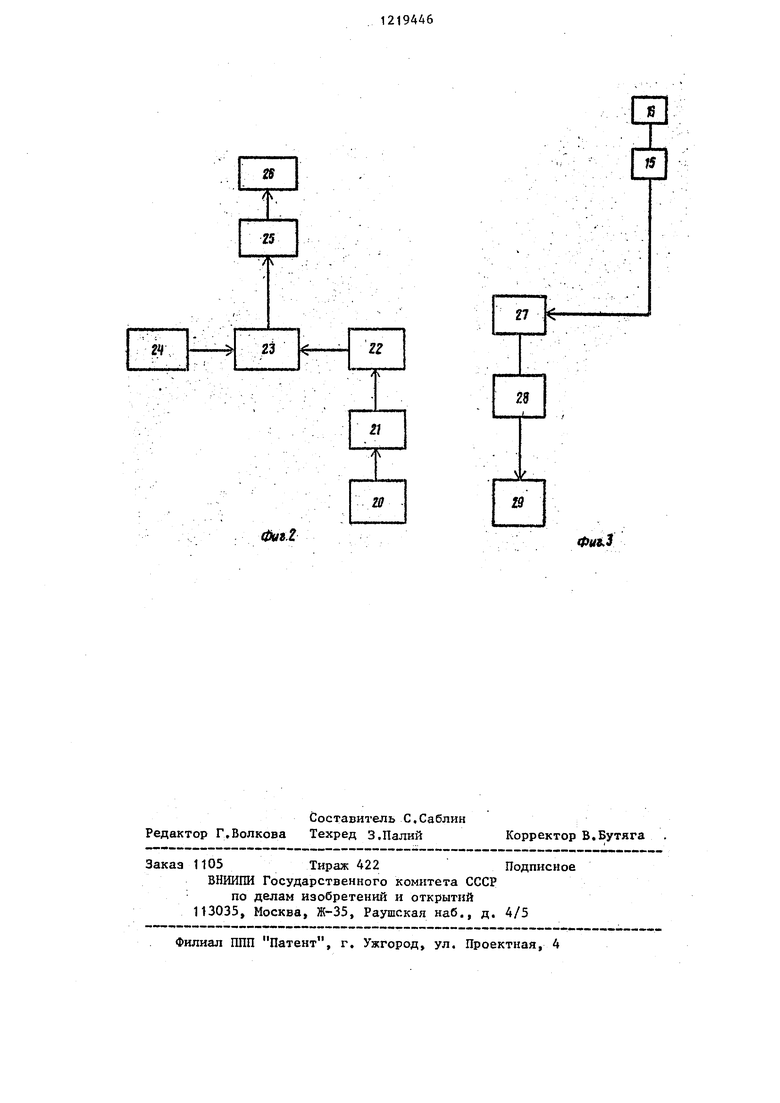
На фиг.1 приведена блок-схема предлагаемой системы; на фиг.2 - блок-схема вычислителя, на-фиг, 3 - блок-схема подсистемы иакренепия.
Предлагаемая система для контроля мореходных характеристик (фиг.1) состоит из датчиков 1 осад,ки (например Румб-БЩ, в количестве двух штук, установленных в посу и в корме судна), датчиков 2 угла крена (например, Румб-БКМ, в количестве двух штук, установленных на миделе по бортам судна), датчиков 3 напряжения корпуса судна (например, тензометрн- ческая станция СИИТ-3) датчиков 4 температуры воды, датчиков 5 температуры корпуса судна, датчиков 6-8 контроля судовых запасов (балласта,
топлива,.питьевой и мытьевой воды),
выходы всех датчиков соединены с соответствующими входами формирователя 9 сигналов, который через последовательно соединенные интерфейс 10 ввода-вывода, вычислительный блок
11 соединен с первым входом блока 12 управления, выходы которого соединены соответственно с блоком 13 питания и с первым входом подсистемы 14 накренения, второй вход которой соединен через сигнализатор 15 крена с вторым задающим блоком 16, второй вхой блока 12 управления через времязадаю11и1й блок 17 (реле задержки времени) соединен с выходом блока 18 сравнеия., первый вход которого соединён с первым задающим блоком 19, а втоой вход - с выходом датчиков, 1
осадки, В качестве, сигнализатора
15крена могут быть использованы два датчика типа Румб-БКМ, которые используются для измерения крена.
Блок 11 вычислителя (фиг.2) со- стоит ИЗ последовательно соединенных блока 20 ввода данных, блока 21 памяти, блока 22 исходных величин, блока. 23 сравнения, второй вход которого соединен с выходом блока 24 измеренных величин, считывающего устройства 25, телетайпа 26.
Подсистема 14 накренения Сфиг.З) содержит блок 27 управления крено- ванием, балластный насос 28, кре- новые цистерны 29, расположен 1ые по бортам судна и в которых находятся измерители уровня, например Румб-Б1Ш.
Система работает следующим об- разом.
На стоянке судна па рейде или у причала для определения остойчивости судна через блок 12 управ- ления включается штурманом блок 13 питания, подается сигнал в подсистему 14 накренения, которая создает кренящий момент путем перекачивания балласта с помощью насоса 28 в одну из креповых систем 29. Перед началом креыования штурман задает с помощью второго задающего блока
16величину накренения 2-3°. При достижении необходимого значения угла крена через сигнализатор 15 крена выдается сигнал в блок 27 управления кренованием, который выключает автоматически балластный насос 28, Значения осадки судна, крена и кренового момента поступа- ют через формирователь 9 сигналов, интерфейс 10 ввода-вывода в вычислительный блок 11. Формирователь
9 сигналов предназначен для преобразования и масштабирования сигналов от датчиков с целью получения стандартных сигналов постоянного тока. Этот блок содержит схемы пороговых устройств превьшения опасных уровне
сигналов.
Интерфейс 10 ввода-вывода обеспечивает одновременную работу ряда датчиков с вычислительным блоком 1 путем разделения во времени процессов обслуш1вания датчиков.
Б вычислительном блоке 11 происходит расчет начальной метацентри- ческой высоты по формуле
loo
где h - начальная мета-центрическая высота судна; D - объемное водоизмещение; &0 - приращение угла крена; Л кренящий момент. Процесс определения метацентри- ческой высоты может быть автоматически повторен, для чего штурману необходимо задать либо через первый задающий блок 19 значения изменения осадки 0,5,1,2 м и т.д. (первый задающий блок 19 может быть выполнен в виде обычного потенциометра),либо через времязадающий блок 17, на котором можно установить время, через которое необходимо контролировать значение мореходных характеристик, например 1 ,2,3,,..,24, 48 ч. В вычислительном блоке 1I происходит вычисление и выдача на телетайп параметров диаграммы статической остойчивости судна, предельных значений угла диаграммы, плеса остойчивости, значения водоизмещения, осадки, осадки кормой, средней осадки, диф- . ферента, крена, С помощью сигналов, поступающих от датчиков 3 напряжения в корпусе судна, от датчиков тем
I пературы воды 4 и корпуса судна 5 в вычислительном блоке 11 происходит вычисление моментов сопротивления в различных сечениях корпуса судна, изгибающего момента в мидёлевом сечении, стрелки прогиба. Вся поступившая информация в вычислительном блоке 11 сравнивается в блоке 23 сравнения с предельно допустимыми значениями, которые хранятся в блоке 21 памяти. Па переходе морем происходит корректировка значений мо- реходно-прочностных характеристик судна с помощью информации, поступающей в вычислительньш блок 11 от датчиков 6-8 контроля судовых запасов,
Предлагаемая система обеспечивает определение фактических характеристик остойчивости и прочности судна и прогнозирование мореходного состояния судна. Система дает возможность . определять следующие параметры: осад- ку носом, кормой и на миделе, дифферент, водоизмещение и дедвейт- статический крен, метацентрическую
высоту и ее предельные значения, диаграм1-1у 1 статической остойчивости и ее основные злементы, расчетньш период бортовой качки, продольный
момент дедвейта и его предельные зна чения. Благодаря этому судно вместо излишнего балласта cMqneT принимать дополнительный груз, что
обеспечивает увеличение его провозной способности и, следовательно, повьшение экономической эффективности.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система определения метацентрической высоты судна | 1986 |
|
SU1560449A1 |
| Система определения метацентрической высоты судна | 1987 |
|
SU1586953A1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КРЕНОВАНИЯ СУДНА | 2012 |
|
RU2522671C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕТАЦЕНТРИЧЕСКОЙ ВЫСОТЫ СУДНА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2240254C1 |
| Система контроля посадки и остойчивости судна | 1986 |
|
SU1398283A1 |
| Устройство для контроля метацентрической высоты судна с бортовой или угловой рампой | 1982 |
|
SU1138341A1 |
| УНИВЕРСАЛЬНОЕ ТРАНСПОРТНОЕ СУДНО | 2015 |
|
RU2603709C1 |
| СПОСОБ ТЕКУЩЕГО КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА | 2021 |
|
RU2767563C1 |
| Способ текущего контроля остойчивости судна | 2024 |
|
RU2829030C1 |
| СПОСОБ КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА НА РАЗРУШАЮЩЕМСЯ ВОЛНЕНИИ | 2011 |
|
RU2455190C1 |
П
15
Фи.г
Составитель с,Саблин Редактор Г.Волкова Техред 3.Палий
Заказ 1105 Тираж 422Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий И3035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП Патент, г. Ужгород ул. Проектная, 4
Фи.3
Корректор В.Бутяга
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Прибор для определения всасывающей силы почвы | 1921 |
|
SU138A1 |
| ЦНИИ им | |||
| А.Н.Крылова, г | |||
| Ленинград. | |||
