Изобретение относится к космической технике, а более конкретно к области автоматизированной сборки космических аппаратов нанокласса.
Известен способ постановки плат согласно устройству адаптивного схвата сборочного робота для установки печатных плат (RU 52758, МПК B25J 15/00, опубл. 27.04.2006), согласно которому с помощью адаптивного схвата устанавливают платы в посадочные места. Адаптивны схват содержит механизм зажима, включающий корпус и два подпружиненных с задних торцов ползуна, установленных параллельно друг другу на краях корпуса в пазах типа "ласточкин хвост" и несущих губки на передних концах, в верхней части зажимных губок обоих ползунов установлены по два сдвоенных подпружиненных шарика с возможностью сдвига платы по трем координатам пропорционально возникающим усилиям и предотвращения заклинивания и поломки платы или схвата в течение всего процесса загрузки.
Недостатком способа является применение сложного механического устройства для выполнения действия по установке печатных плат, при этом данным устройством невозможно установить в труднодоступных местах, например, в космических аппаратах нанокласса.
Наиболее близким по технической сущности является способ автоматизированной сборки космических аппаратов (US 20220144460, МПК B64G 4/00, B64G 1/10, B64G 1/24, опубл. 12.05.2022), согласно которому выводят на орбиту автоматический космический аппарат, выполненный с возможностью сборки внутри него спутников типа Cubesate и развертывания их в космическом пространстве. В одном из вариантов осуществления автоматический космический аппарат включает корпус, выполненный с возможностью развертывания в условиях микрогравитации, при этом корпус имеет точку доступа (например, дверь), область хранения, выполненную с возможностью хранения частей спутника, один или несколько роботов, подвижно расположенных в корпусе, и контроллер, выполненный с возможностью управления по меньшей мере одним из одного или более роботов для доступа частей из области хранения и к сборку деталей на сборочной площадке корпуса. Контроллер также может управлять развертыванием собранного спутника через дверь корпуса в положение в условиях микрогравитации.
Основным недостатком способа является ограниченность движения пальцев схвата робота в случае, если платы необходимо устанавливать плотнее друг к другу, им будут препятствовать стенки корпуса изделия и закончить процесс установки платы не удастся, также ограниченность пространством основного космического аппарата, при выходе из строя какого-либо элемента устройств для сборки отсутствует возможность исправления и починки.
Задачей изобретения является обеспечение возможности роботизированного плотного монтажа печатных плат в космических аппаратах нанокласса.
Техническим результатом заявленного изобретения является сокращение времени сборки всего космического аппарата.
Указанный технический результат достигается тем, что в роботизированном способе постановки плат в корпус малого космического аппарата нанокласса, заключающемся в том, что постановку осуществляют с помощью пальцев схвата робота, вводят боковые кромки платы в желобковые направляющие, после чего освобождают плату и дают ей возможность упасть до контакта с разъемом, сводят пальцы схвата и осаждают плату торцами, нажимая на верхнюю кромку платы до полной установки в разъеме.
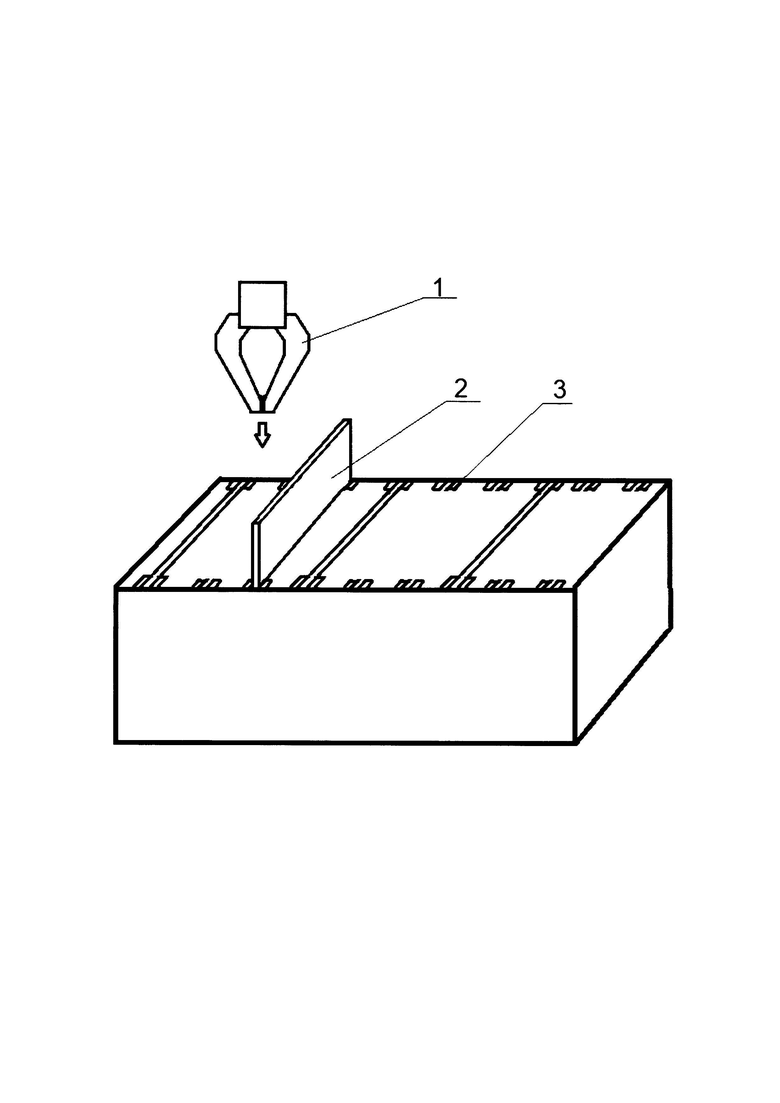
Сущность заявленного изобретения поясняется чертежом, на котором изображена схема взаимодействия пальцев схвата робота с печатными платами космического аппарата нанокласса.
Схват робота (1) удерживает плату (2) за боковые кромки, опускает их в желобковые направляющие (3) и производит соединение платы с разъемом, но движение пальцев схвата препятствуют стенке корпуса изделия и закончить процесс установки платы не удастся.
Предлагается разделить процесс монтажа платы роботом на три этапа:
1. Введение боковых кромок платы (2) в направляющие (3) на допустимую глубину.
2. Освободить плату (2) и дать ей возможность упасть до контакта с разъемом.
3. Свести пальцы схвата (1) и осадить плату торцами, нажимая на верхнюю кромку платы (2).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЗИРОВАННОЙ СБОРКИ КОСМИЧЕСКИХ АППАРАТОВ | 2024 |
|
RU2824224C1 |
| АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС СБОРКИ КОСМИЧЕСКИХ АППАРАТОВ | 2024 |
|
RU2825164C1 |
| КОНСТРУКЦИЯ УНИФИЦИРОВАННОЙ КОСМИЧЕСКОЙ ПЛАТФОРМЫ, ОРИЕНТИРОВАННОЙ НА АВТОМАТИЗИРОВАННУЮ СБОРКУ | 2024 |
|
RU2825163C1 |
| Многоцелевая модульная платформа для создания космических аппаратов нанокласса | 2021 |
|
RU2762452C1 |
| СИСТЕМА РОБОТИЗИРОВАННОЙ СБОРКИ КРУПНОГАБАРИТНЫХ ФЕРМ, В ТОМ ЧИСЛЕ НА ОРБИТЕ ЗЕМЛИ ИЛИ ЛУНЕ | 2021 |
|
RU2790311C2 |
| Спутник-конструктор - учебно-демонстрационная модель | 2017 |
|
RU2693722C2 |
| КОМПАКТНЫЙ ДЕТЕКТОР УФ-ИЗЛУЧЕНИЯ АТМОСФЕРЫ ЗЕМЛИ ДЛЯ ИСПОЛЬЗОВАНИЯ НА МАЛЫХ КОСМИЧЕСКИХ АППАРАТАХ | 2020 |
|
RU2764400C1 |
| КОМПАКТНЫЙ ДЕТЕКТОР УФ ИЗЛУЧЕНИЯ АТМОСФЕРЫ ЗЕМЛИ С ШИРОКИМ ПОЛЕМ ЗРЕНИЯ ДЛЯ ИСПОЛЬЗОВАНИЯ НА МАЛЫХ КОСМИЧЕСКИХ АППАРАТАХ | 2020 |
|
RU2764401C1 |
| ПИКОСПУТНИК | 2014 |
|
RU2550241C1 |
| БИНАРНЫЙ КОСМИЧЕСКИЙ АППАРАТ С РЕКОНФИГУРИРУЕМОЙ АНТЕННОЙ, СОВМЕЩЕННОЙ СО СВЕРТЫВАЕМОЙ В РУЛОН СОЛНЕЧНОЙ БАТАРЕЕЙ, РАЗВЕРТЫВАЕМОЙ МУЛЬТИВЕКТОРНЫМИ МАТРИЧНЫМИ РАКЕТНЫМИ ДВИГАТЕЛЯМИ | 2020 |
|
RU2735448C1 |
Изобретение относится к области космической техники, в частности к способам роботизированной сборки космических аппаратов нанокласса. Для постановки плат в корпус КА вводят боковые кромки платы в желобковые направляющие с помощью схвата робота, после чего освобождают плату и дают ей возможность упасть до контакта с разъемом. Сводят пальцы схвата и осаждают плату торцами, нажимая на верхнюю кромку платы до полной установки в разъеме. Достигается сокращение времени сборки всего космического аппарата. 1 ил.
Роботизированный способ постановки плат в корпус малого космического аппарата нанокласса, заключающийся в том, что постановку осуществляют с помощью пальцев схвата робота, отличающийся тем, что с помощью схвата робота вводят боковые кромки платы в желобковые направляющие, после чего освобождают плату и дают ей возможность упасть до контакта с разъемом, сводят пальцы схвата и осаждают плату торцами, нажимая на верхнюю кромку платы до полной установки в разъеме.
| Подшипник | 1936 |
|
SU52758A1 |
| US 20220144460 A1, 12.05.2022 | |||
| Гибкая производственная система | 1986 |
|
SU1373535A1 |
| US 10966360 B2, 30.03.2021 | |||
| CN 104552294 B, 20.01.2016. | |||

