Изобретение относится к гравиметрии и может быть использовано для измерения гравитационного поля Земли, на орбите которой имеется космический аппарат (КА) с гравитационно-магнитной системой ориентации и стабилизации.
Известен способ измерения гравитационного поля Земли при проведении лабораторных работ, основанный на использовании космического аппарата, оснащенного маховичной системой ориентации и стабилизации, находящегося на круговой орбите, измерении его координат и определении углов стабилизационных колебаний космического аппарата, отличающийся тем, что космический аппарат на определенном интервале анализа Т, включающем исследуемый участок гравитационного поля Земли, посредством маховичной системы ориентации и стабилизации вводят в автоколебательный режим с параметрами:
амплитудой автоколебаний космического аппарата ϕ0 = 45°, соответствующей выявлению максимального воздействия гравитационного поля Земли, в том числе и его аномалий на динамику космического аппарата;
фазой колебаний ν0 = 0, определяемой из условия начального совмещения собственных колебаний космического аппарата и вынужденных;
частотой автоколебаний ωР
где Jx, Jy, Jz - моменты инерции относительно соответствующих осей космического аппарата;
μ = 398602 км3/с2 - гравитационная константа Земли;
RKA = R3+h - радиус орбиты космического аппарата, где R3 - радиус Земли, h -высота круговой орбиты космического аппарата;
К1, К2 - коэффициенты в законе формирования управляющего момента системы ориентации и стабилизации в канале тангажа Му = K1ϑ* + K2ϑ* и, на основе сравнения разностей стабилизационных колебаний амплитуд:
Δij = ϑ*i - ϑ0ij
где ϑi* - фактические значения стабилизационных колебаний космического аппарата в канале тангажа на интервале анализа Т в i-e моменты времени;
ϑ0ij - модельные значения, полученные из решения уравнения движения модели с различными j-ми значениями гравитационного параметра ω20j,
i=1, 2, …, N - точки текущего времени на интервале анализа Т, в которых осуществляются сравнения значений фактических и модельных разностей колебаний космического аппарата;
j=l, 2, …, М - варианты модели гравитационного поля Земли с различными значениями гравитационного параметра ω2mj;
определяют величину аномалии гравитационного поля Земли ГПЗ
где ω20 - величина гравитационного параметра, которая фактически имеет место в подспутниковой точке и оказывает воздействие на космический аппарат;
ω2mj - модельное значение гравитационного параметра, которое подставляется в уравнение движение модели космического аппарата для расчета величины отклонения ϑ0ij и модельное значение, наиболее близкое к фактическому, определяют из условия наибольшего приближения расчетных отклонений космического аппарата к измеренным на интервале анализа Т, которое обеспечивает  (патент РФ, №2 398 249, 2010 г. ). Однако данный способ сложен в применении и имеет недостаточную точность.
(патент РФ, №2 398 249, 2010 г. ). Однако данный способ сложен в применении и имеет недостаточную точность.
Наиболее близким по технической сути является способ измерения гравитационного поля Земли, основанный на использовании космического аппарата (КА), оснащенного гравитационно-магнитной системой ориентации и стабилизации, находящегося на круговой орбите, и измерении его координат, отличающийся тем, что на участке измерения определяют стабилизационные колебания КА по каналам крена, тангажа и рыскания относительно центра масс с помощью гравитационно-магнитной системы ориентации и стабилизации, и затем гравитационный параметр ω0 определяют на основе статических параметров по формуле:

где γст, Ψст - углы статических отклонений системы ориентации, выделенные из стабилизационных колебаний по каналам крена, тангажа и рыскания соответственно, путем разложения в ряд Фурье измеренных стабилизационных колебаний;
Мх, Му, Mz - возмущающие моменты в каналах крена, тангажа и рыскания соответственно, определенные на основании априорной информации о моментно-центровочных характеристиках КА, математической модели процесса стабилизации и соответствующие углам статических отклонений;
Ix, Iy, Iz - плоскостные моменты инерции КА;
а при повторном пролете КА над этим участком Земли отключают магнитную систему стабилизации и гравитационный параметр определяют по формулам на основе колебательных характеристик:
где ω1, ω2; ω3 - частоты колебаний КА в каналах тангажа, крена и рыскания соответственно, затем сравнивают полученные значения гравитационного параметра, определенного на основе статических параметров (1), и на основе колебательных характеристик (2) и выделяют области аномалий гравитационного поля Земли (патент РФ №2251127, 2003 г.). Однако данный способ обладает невысокой точностью измерений, а также требует больших материальных затрат и трудоемких вычислительных процедур.
Технический результат - упрощение способа измерения гравитационного поля Земли путем использования вращающегося тела -волчка Томпсона.
Он достигается тем, что в известном способе, включающем измерение координат КА с гравитационно-магнитной системой ориентации и стабилизации, находящегося на круговой орбите на участке измерения гравитационного поля земли космический аппарат ориентируют по нормали к гравитационному полю Земли с помощью гравитационно-магнитной системы ориентации и стабилизации, для измерения гравитационного поля используют вращающееся тело - волчок Томпсона, который приводят во вращение с угловой скоростью
где Jx, Jz - моменты инерции относительно основных осей симметрии рабочего тела, Р - вес тела, r - радиус кривизны, h - расстояние от центра масс до точки опоры при вращении, необходимой для прецессии волчка и его отклонения от вертикального положения, затем измеряют гироскопический момент, возникающий при прецессии волчка Томпсона, затем по формуле для гироскопического момента волчка определяют реакцию опоры, затем по изменению нормальной реакции опоры определяют изменение ускорения свободного падения и его распределение по исследуемому участку траектории движения КА по формулам:
 ,
,
где  - гироскопический момент,
- гироскопический момент,  - сила трения, ƒтр - коэффициент трения,
- сила трения, ƒтр - коэффициент трения,  - радиус вектор до центра тяжести волчка,
- радиус вектор до центра тяжести волчка,  - сила трения, где N-нормальная реакция опоры, затем на основе измерения ускорения свободного падения определяют силу гравитационного поля Земли в точке измерения:
- сила трения, где N-нормальная реакция опоры, затем на основе измерения ускорения свободного падения определяют силу гравитационного поля Земли в точке измерения:
где Г - напряженность гравитационного поля, m - гравитационная масса, F - гравитационная сила.
Волчок Томпсона выбранный в качестве вращающегося тела имеет наибольший момент отклонения при прецессии, что позволяет использовать его для измерения нормальной реакции опоры, ускорения свободного падения и гравитационного поля Земли, (см. Andreev A.I., Perekrestov А.Р. Analysis on non-stationary gyroscopes and their application in measurement technology // Journal of Physics: Conference Series. - IOP Publishing, 2021. - T. 2091. - №. 1. - C. 012006.),
Способ осуществляют следующим образом
На участке измерения гравитационного поля Земли КА ориентируют по нормали к гравитационному полю Земли с помощью гравитационно-магнитной системы ориентации и стабилизации, для измерения гравитационного поля используют вращающееся тело - волчок Томпсона, который приводят во вращение с угловой скоростью 
затем измеряют гироскопический момент, возникающий при прецессии волчка Томпсона, по формуле для гироскопического момента волчка определяют реакцию опоры, затем по изменению нормальной реакции опоры определяют изменение ускорения свободного падения и его распределение по исследуемому участку траектории движения КА по формулам:
где N - нормальная реакция опоры,  - гироскопический момент,
- гироскопический момент,  -сила трения, ƒтр - коэффициент трения,
-сила трения, ƒтр - коэффициент трения,  - радиус вектор до центра тяжести волчка,
- радиус вектор до центра тяжести волчка,  - сила трения, Г - напряженность гравитационного поля.
- сила трения, Г - напряженность гравитационного поля.
Примеры осуществления способа:
Пример 1 - измерение гравитационного поля Земли при движении КА с изменением орбиты от центра гравитационного поля к его периферии.
При удалении КА от центра гравитационного поля КА ориентируют по нормали к тяготеющему центру с помощью гравитационно-магнитной системы ориентации и стабилизации и удерживают постоянной на всей траектории, для измерения гравитационного поля используют вращающееся тело - волчок Томпсона, который приводят во вращение с угловой скоростью
затем измеряют гироскопический момент, возникающий при прецессии волчка Томпсона, по формуле для гироскопического момента волчка определяют реакцию опоры, затем по изменению нормальной реакции опоры определяют изменение ускорение свободного падения и его распределение по исследуемому участку траектории движения КА по формулам:
 ,
,
Пример 2 - измерение гравитационного поля Земли при движении КА по стационарной орбите.
При движении ориентируют КА по стационарной орбите его ориентируют по нормали к тяготеющему центру с помощью гравитационно-магнитной системы ориентации и стабилизации и удерживают постоянной на всей траектории, для измерения гравитационного поля используют вращающееся тело - волчок Томпсона, КА ориентируют так, чтобы ось симметрии вращающегося тела (волчка Томпсона) оставалась по нормали к тяготеющему центру, вращающееся тело приводят во вращение с угловой скоростью
затем измеряют гироскопический момент, возникающий при прецессии волчка Томпсона, по формуле для гироскопического момента волчка определяют реакцию опоры, затем по изменению нормальной реакции опоры определяют изменение ускорение свободного падения и его распределение по исследуемому участку траектории движения КА по формулам:
Способ осуществляют с помощью устройства гравиметра
Известно устройство гравиметр, содержащее термозащитный корпус, закрытый герметичной крышкой, в которой помещены имеющие внешние зеркальные поверхности стакан с основанием, обеспечивающим общий газовый объем стакана с корпусом, к основанию подвешен упругий заполненный электропроводной рабочей жидкостью сильфон, содержащий в верхней части наполнительную трубку с вентилем и капиллярную трубку с капилляром, в котором находится уровень рабочей жидкости, а в нижней части термокомпенсирующую этот уровень биметаллическую пластину, примыкающую к донышку сильфона, при этом капилляр капиллярной трубки выполнен из высокоомного материала и соединен своими концами электрической цепью с регистратором таким образом, что уровень рабочей жидкости служит в качестве ползуна реостата, представленного капилляром (патент РФ №2045085, 1995 г.). Однако данное устройство имеет сложную конструкцию.
Наиболее близким по технической сути является устройство гравиметр, содержащее чувствительный элемент акселерометра, первый выход которого соединен с датчиком момента, а второй выход - с датчиком температуры, дополнительно введены два компенсатора, два интегратора, два трансформатора масштаба, два счетчика импульсов, мультиплексор, блок памяти, вычислитель и генератор тактовых импульсов, при этом между выходом датчика момента и одним входом мультиплексора включены последовательно соединенные первый компенсатор, первый интегратор, первый трансформатор масштаба и первый счетчик импульсов, а между выходом датчика температуры и другим входом мультиплексора включены последовательно соединенные второй компенсатор, второй интегратор, второй трансформатор масштаба и второй счетчик импульсов, причем к выходу мультиплексора подсоединены последовательно соединенные блок памяти и вычислитель, а выходы генератора тактовых импульсов подключены к входам управления первого и второго трансформаторов масштаба, первого и второго счетчиков импульсов, мультиплексора, блока памяти и вычислителя соответственно (патент РФ №4011, 1997 г.). Однако данное устройство имеет сложную конструкцию.
Указанный технический результат достигается тем, что в известном устройстве, содержащем чувствительный элемент акселерометра с блоком памяти, соединенный с вычислителем и датчиком момента, имеется вращающееся тело - волчок Томпсона, установленный в нагруженном состоянии на неподвижной основе, с заданным коэффициентом шероховатости, и закрепленный в направляющей через подшипник, с возможностью вращения волчка в направляющей, направляющая закреплена на корпусе гравиметра и в основании с помощью пружин, вращающееся тело соединено с электродвигателем через электромуфту, электродвигатель и электромуфта соединены с аккумулятором, электромуфта соединена с аккумулятором через выключатель, вычислитель, установленный на корпусе гравиметра и соединенный с электродвигателем, аккумулятором и тензодатчиком, который установлен между направляющей и корпусом устройства, при этом гравиметр расположен в центре масс КА и соединен с системой ориентации и стабилизации.
На чертеже схематично изображено предлагаемое устройство:
фиг. 1 - общий вид
Устройство содержит корпус 1, вращающееся тело 2 - волчок Томпсона, установленное в корпусе 1 на основании 3, электромуфту 4 соединяющую вращающееся тело 2 и электродвигатель 5, выключатель 6, соединяющий электромуфту 4 с аккумулятором 7, аккумулятор 7 соединенный с электродвигателем 5, направляющая 8, установленная в корпусе 1, закрепленная пружинами 9 и соединенная с вращающимся телом 2 через подшипник 10, тензодатчик 11, установленный между направляющей 8 и корпусом 1, вычислитель 12, установленный на корпусе 1 и соединенный с аккумулятором 7, электродвигателем 5 и тензодатчиком 11, блок памяти 13, установленный на вычислителе 12, и соединено с системой ориентации и стабилизации.
Пример конкретного выполнения устройства:
Вращающееся тело 2 - волчок Томпсона, установленное в корпусе 1 гравиметра на основании 3, позволяющее измерять напряженность гравитационного поля при прецессии (Andreev A.I., Perekrestov А.P. Analysis on поп-stationary gyroscopes and their application in measurement technology // Journal of Physics: Conference Series. - IOP Publishing, 2021. - T. 2091. - №. 1. - C. 012006) - https://ru.wikipedia.org/wiki/%D0%9A%D0%B8%D1%82%D0%B0%D0%B9%D1%81%D0%BA%D0%B8%D0%B9_%D0%B2%D0%BE%D0%BB%D1%87%D0%BE%D0%BA
Электромуфта 4, соединяющую вращающееся тело 2 и электродвигатель 5, установленная на валу электродвигателя 5, необходимо для разъединения волчка Томпсона 1 и электродвигателя 5 при достижении заданных оборотов вращающегося тела по сигналу от электродвигателя https://aliexpress.ru/item/1005005949478753.html?spm=a2g2w.orderdetail.0.0.45f84aa6dQ50Yc&sku_id=12000034986801312).
Тензодатчик 11, установленный между направляющей 8 и корпусом 1, измеряющий усилия от гироскопического момента волчка https://ru.wikipedia.org/wiki/%D0%A2%D0%B5%D0%BD%D0%B7%D0%BE%D0%BC%D0%B5%D1%82%D1%80%D0%B8%D1%87%D0%B5%D1%81%D0%BA%D0%B8%D0%B9_%D0%B4%D0%B0%D1%82%D1%87%D0%B8%D0%BA
Вычислитель 12, установленный на корпусе 1 и соединенный с аккумулятором 7, обрабатывающий сигнал от тензодачтика 11 и вычисляющий ускорение свободного падения - на базе процессора ардуино - https://arduino.ru/Hardware/ArduinoBoardNano
Установленные пружины позволяют исключить смещение вращающегося тела относительно основы при вибрациях и сильных перегрузках.
Устройство работает следующим образом:
Вращающееся тело 2 - волчок Томпсона, установленное на основании 3 раскручивается электродвигателем 5 при включенной электромуфте 4, которые получаются питание от аккумулятора 7. При достижении заданных оборотов в зависимости от момента инерции волчка, вычисляемого по формуле  по сигналу от вычислителя 12 выключатель 6 отключает электромуфту 4, и вращающееся тело 2 вращается свободно при возникновении гироскопического момента, который через направляющую 8 передает усилие на тензодатчик 11. Сигнал от тензодатчика 11 подается на вычислитель 12, где обрабатывается, и определяется значение ускорения свободного падения, которое передается в блок памяти 13. Устройство работает циклично в зависимости от заданной программы. При снижении уровня заряда аккумулятора 7, частота циклом измерения автоматически уменьшается с помощью блока вычислений. Натяжение пружин 9 устанавливается таким образом, чтобы исключить смещение тела вращения при прецессии относительно основания. Устройство установлено вблизи центра масс внутри КА и соединено с системой ориентации и стабилизации.
по сигналу от вычислителя 12 выключатель 6 отключает электромуфту 4, и вращающееся тело 2 вращается свободно при возникновении гироскопического момента, который через направляющую 8 передает усилие на тензодатчик 11. Сигнал от тензодатчика 11 подается на вычислитель 12, где обрабатывается, и определяется значение ускорения свободного падения, которое передается в блок памяти 13. Устройство работает циклично в зависимости от заданной программы. При снижении уровня заряда аккумулятора 7, частота циклом измерения автоматически уменьшается с помощью блока вычислений. Натяжение пружин 9 устанавливается таким образом, чтобы исключить смещение тела вращения при прецессии относительно основания. Устройство установлено вблизи центра масс внутри КА и соединено с системой ориентации и стабилизации.
Положительный эффект - предлагаемый способ и устройство для его осуществления позволяют повысить точность измерения гравитационного поля Земли.
| название | год | авторы | номер документа |
|---|---|---|---|
| Лазерный космический гравитационный градиентометр | 2021 |
|
RU2754098C1 |
| СПОСОБ ИЗМЕРЕНИЯ АНОМАЛИЙ ГРАВИТАЦИОННОГО ПОЛЯ ЗЕМЛИ ПРИ ПРОВЕДЕНИИ ЛАБОРАТОРНЫХ РАБОТ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2398249C2 |
| Способ управления движением космического аппарата с управляемой ориентацией | 2020 |
|
RU2767648C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА ТРЕНИЯ ТРУЩИХСЯ ПАР И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2785527C1 |
| КОМБИНИРОВАННАЯ ГРАВИТАЦИОННАЯ СИСТЕМА ОРИЕНТАЦИИ МАЛОГО КОСМИЧЕСКОГО АППАРАТА | 2016 |
|
RU2658070C2 |
| СПОСОБ ВЫЯВЛЕНИЯ АНОМАЛИЙ ГРАВИТАЦИОННОГО ПОЛЯ ЗЕМЛИ ПРИ ПРОВЕДЕНИИ ЛАБОРАТОРНЫХ РАБОТ | 2005 |
|
RU2308744C2 |
| Астроинерциальная навигационная система с коррекцией по гравитационному полю Земли | 2023 |
|
RU2820600C1 |
| Способ динамичной высокоточной ориентации и стабилизации космического аппарата | 2018 |
|
RU2702932C1 |
| СПОСОБ ОДНООСНОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА ВЫТЯНУТОЙ ФОРМЫ | 2015 |
|
RU2594056C1 |
| СПОСОБ ОДНООСНОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА ВЫТЯНУТОЙ ФОРМЫ | 2015 |
|
RU2594057C1 |
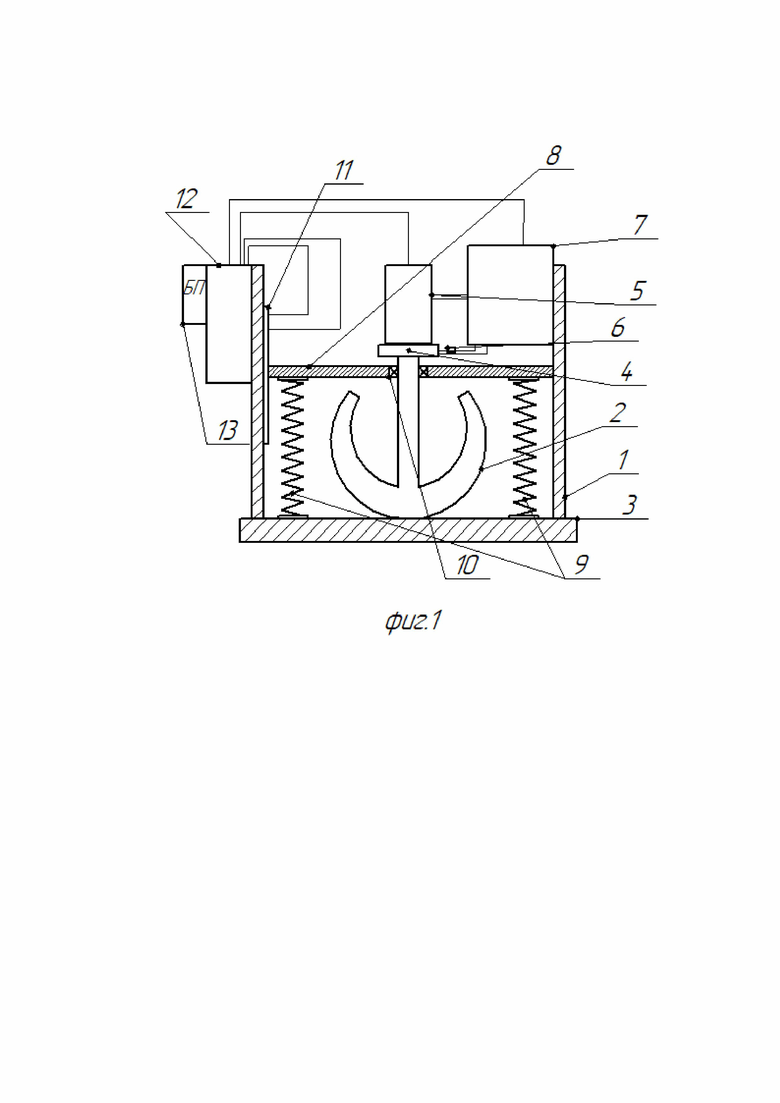
Группа изобретений относится к средствам измерения гравитационного поля Земли (ГПЗ) с использованием космического аппарата (КА), находящегося на круговой орбите. Сущность: устройство для измерения ГПЗ содержит чувствительный элемент акселерометра, датчик момента, волчок Томпсона (2), установленный в нагруженном состоянии на неподвижной основе (3) и закрепленный в направляющей (8) через подшипник (10). Направляющая (8) закреплена на корпусе (1) устройства и в основании (3) при помощи пружин (9). Волчок Томпсона (2) соединен с электродвигателем (5) через электромуфту (4). Электродвигатель (5) и электромуфта (4) соединены с аккумулятором (7). Причем электромуфта (4) соединена с аккумулятором (7) через выключатель (6). На корпусе (1) установлен вычислитель (12), соединенный с электродвигателем (5), аккумулятором (7) и тензодатчиком (11). Тензодатчик (11) установлен между направляющей (8) и корпусом (1) устройства. На участке измерения КА ориентируют по нормали к ГПЗ с помощью гравитационно-магнитной системы ориентации и стабилизации. Устанавливают устройство для измерения ГПЗ в непосредственной близости от центра масс КА и соединяют его с системой ориентации и стабилизации. Приводят во вращение волчок Томпсона. Измеряют гироскопический момент, возникающий при прецессии волчка Томпсона. По формуле для гироскопического момента волчка определяют реакцию опоры. По изменению нормальной реакции опоры определяют изменение ускорения свободного падения и его распределение по исследуемому участку траектории движения КА. На основе измерения ускорения свободного падения определяют силу ГПЗ в точке измерения. Технический результат: повышение точности и упрощение измерения ГПЗ. 2 н.п. ф-лы, 1 ил.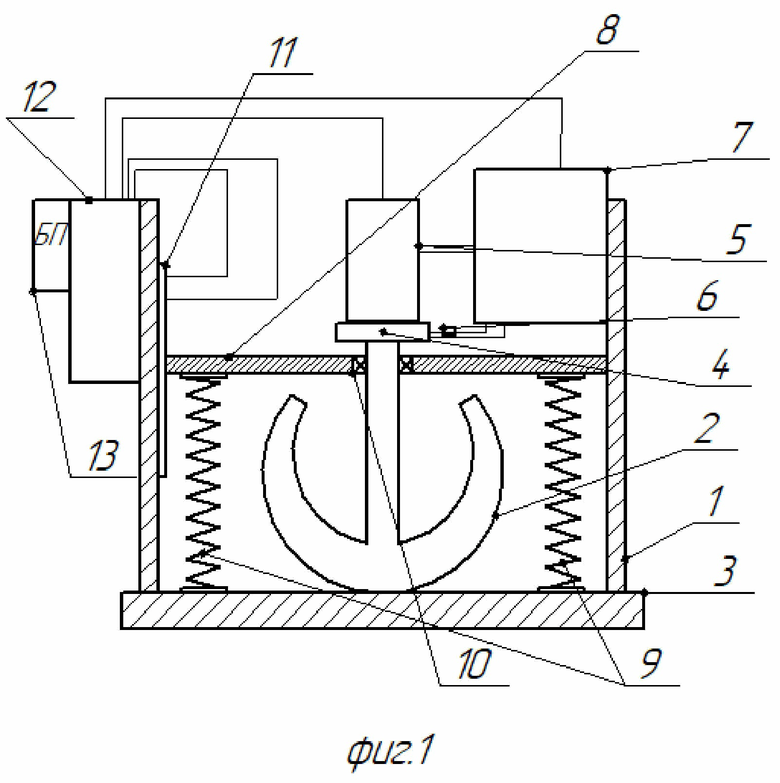
1. Способ измерения гравитационного поля Земли, предусматривающий измерение координат космического аппарата (КА) с гравитационно-магнитной системой ориентации и стабилизации, находящегося на круговой орбите, отличающийся тем, что на участке измерения гравитационного поля Земли космический аппарат ориентируют по нормали к гравитационному полю Земли с помощью гравитационно-магнитной системы ориентации и стабилизации, для измерения гравитационного поля используют вращающееся тело - волчок Томпсона, который приводят во вращение с угловой скоростью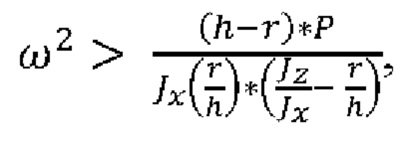
где Jx, Jz – моменты инерции относительно основных осей симметрии рабочего тела, Р – вес тела, r – радиус кривизны, h - расстояние от центра масс до точки опоры при вращении, необходимой для прецессии волчка и его отклонения от вертикального положения, затем измеряют гироскопический момент, возникающий при прецессии волчка Томпсона, по формуле для гироскопического момента волчка определяют реакцию опоры, затем по изменению нормальной реакции опоры определяют изменение ускорения свободного падения и его распределение по исследуемому участку траектории движения КА по формулам 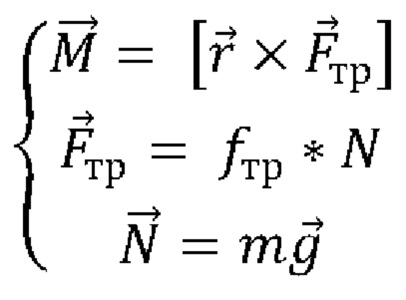 ,
,
где  – гироскопический момент,
– гироскопический момент,  – сила трения, ƒтр - коэффициент трения,
– сила трения, ƒтр - коэффициент трения,  – радиус-вектор до центра тяжести волчка,
– радиус-вектор до центра тяжести волчка,  – сила трения, где N - нормальная реакция опоры, затем на основе измерения ускорения свободного падения определяют силу гравитационного поля Земли в точке измерения
– сила трения, где N - нормальная реакция опоры, затем на основе измерения ускорения свободного падения определяют силу гравитационного поля Земли в точке измерения  ,
,
где Г - напряженность гравитационного поля, m – гравитационная масса, F – гравитационная сила.
2. Устройство для измерения гравитационного поля Земли, выполненное в виде гравиметра, содержащее чувствительный элемент акселерометра с блоком памяти, соединенный с вычислителем и датчиком момента, отличающееся тем, что имеется вращающееся тело – волчок Томпсона, установленный в нагруженном состоянии на неподвижной основе с заданным коэффициентом шероховатости и закрепленный в направляющей через подшипник с возможностью вращения волчка в направляющей, направляющая закреплена на корпусе гравиметра и в основании с помощью пружин, вращающееся тело соединено с электродвигателем через электромуфту, электродвигатель и электромуфта соединены с аккумулятором, электромуфта соединена с аккумулятором через выключатель, на корпусе гравиметра установлен вычислитель, соединенный с электродвигателем, аккумулятором и тензодатчиком, который установлен между направляющей и корпусом устройства, при этом гравиметр расположен в непосредственной близости от центра масс КА и соединен с системой ориентации и стабилизации.
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЯ СИЛЫ ТЯЖЕСТИ | 2011 |
|
RU2461027C1 |
| Прибор для ориентирования отклоняющего инструмента при наклонном бурении скважин | 1956 |
|
SU108644A1 |
| RU 2006109370 A, 20.10.2007. | |||

