Изобретение относится к управляющим устройствам космических летательных аппаратов и может найти применение при управлении угловым движением малого космического аппарата (МКА).
Известна гравитационная система ориентации, применявшаяся на автоматических космических аппаратах «Надежда» (в рамках проекта COSPAS-SARSAT). Эти аппараты своей продольной осью сориентированы на центр Земли, а их система ориентации представляет собой выдвигающуюся гравитационную штангу с грузом.
Недостатком указанной системы является то, что стабилизация углового положения КА при использовании гравитационной штанги производится только по двум осям - крена и тангажа. Для обеспечения требуемой точности необходимо использовать штангу большой длины (порядка 10 м), управление угловым положением КА не предусмотрено.
Наиболее близким является гравитационная система ориентации, представленная в книге В.И. Попова «Системы ориентации и стабилизации космических аппаратов», М.: Машиностроение, 1977 г., 144-147 с. Она принята за прототип и представляет собой комбинированную гравитационную систему ориентации МКА, которая содержит самовыдвигающуюся гравитационную штангу с грузом в виде активного управляющего элемента (вращающийся маховик), закрепленного на ее конце. Такая система стабилизации искусственного спутника является пассивной. В процессе движения КА по орбите продольная ось системы под действием гравитационных моментов устанавливается по местной вертикали, стабилизируя КА по углам крена и тангажа. Ось быстро вращающегося маховика в течении всего времени движения системы будет достаточно точно направлена перпендикулярно плоскости орбиты, задавая тем самым КА требуемое направление по курсу и крену. Таким образом, система по определению является стабилизирующей, а не управляющей, и, как и все гравитационные системы, обеспечивает невысокую точность ориентации. Эти недостатки учтены при разработке описываемого устройства.
Задача - обеспечение управления МКА относительно всех трех осей ориентации - крена, рыскания и тангажа, а также повышение точности системы до угловых минут.
Поставленная задача решена следующим образом. Комбинированная гравитационная система ориентации МКА содержит самовыдвигающуюся гравитационную штангу с грузом в виде активного управляющего элемента, закрепленного на ее конце. Для управления МКА по осям крена, рыскания и тангажа, в роли груза используют двухстепенной гироскоп с датчиком момента на оси подвеса гиродвигателя. Это дает ей возможность работать в качестве гиродина для создания управляющего гироскопического момента по курсу, и в качестве электромеханического исполнительного органа для создания управляющего момента по углам крена и тангажа. Это существенно расширяет функциональные возможности гравитационной системы ориентации, позволяя управлять угловым положением МКА, а также увеличивает точность гравитационной системы ориентации. Таким образом, МКА будет стабилизироваться по углам крена и тангажа гравитационным моментом от штанги, а по углу рыскания относительно оси штанги станет возможно управление угловым положением посредством гироскопического момента.
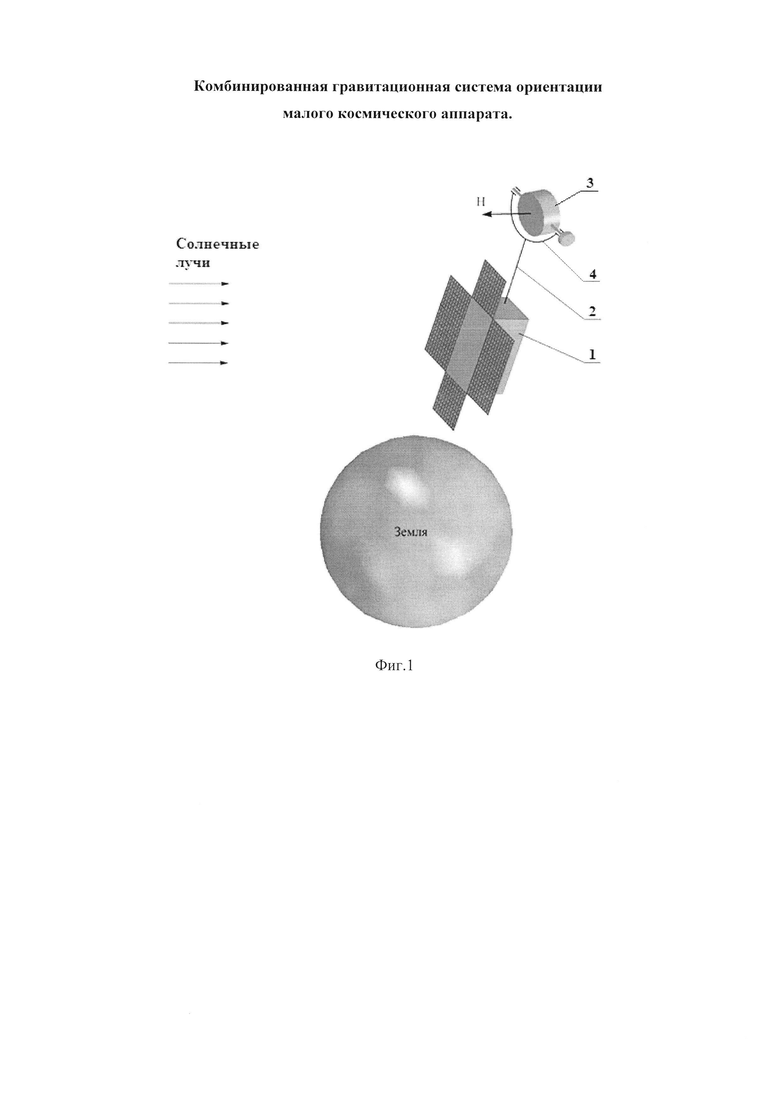
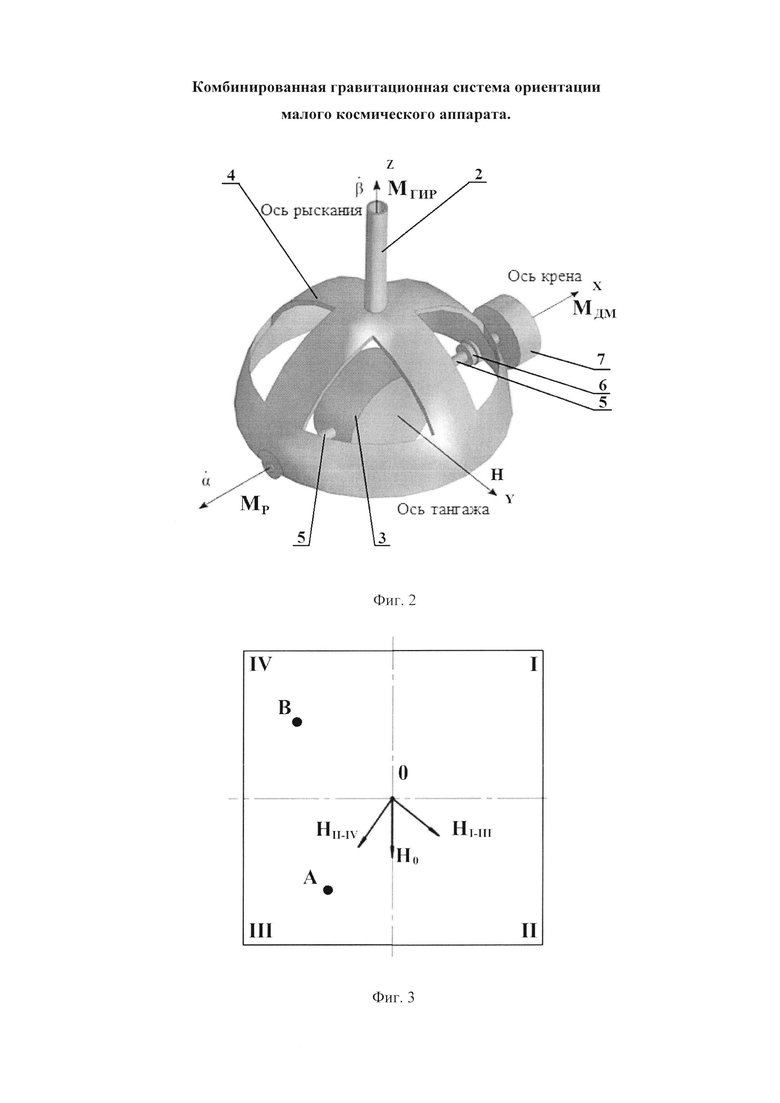
На фиг. 1 показана кинематическая схема механической системы «МКА - гравитационная штанга - гиродин». Фиг. 2 поясняет устройство гиродина. На фиг. 3 показано условно-графическое представление перемещения проекции оси гравитационной штанги по земной поверхности.
Корпус МКА 1 соединен с гравитационной штангой 2, на конце которой установлен гиродин, состоящий из гиродвигателя 3, закрепленного в корпусе 4 (на фиг. 1 показан условно). В корпусе 4 (фиг. 2) при помощи полуосей 5 зафиксирован гиродвигатель 3. Полуоси 5 соединены с корпусом 4 посредством шарикоподшипниковых опор 6 (с одной стороны не показано). На одной полуоси подвеса гиродвигателя установлен датчик момента 7.
Работа устройства пояснена векторами моментов (МР, МДМ, МГИР) и угловых скоростей  , представленными на фиг. 2 и 3. Блок управления, расположенный внутри корпуса МКА, подает команду на изменение курсового угла. При этом на обмотку статора датчика момента подается ток и возникает момент относительно оси подвеса гиродвигателя 3. В соответствии с теорией гироскопов по закону прецессии в этом случае относительно оси гравитационной штанги возникает скорость прецессии
, представленными на фиг. 2 и 3. Блок управления, расположенный внутри корпуса МКА, подает команду на изменение курсового угла. При этом на обмотку статора датчика момента подается ток и возникает момент относительно оси подвеса гиродвигателя 3. В соответствии с теорией гироскопов по закону прецессии в этом случае относительно оси гравитационной штанги возникает скорость прецессии  и соответственно происходит угловое движение механической системы «МКА - гравитационная штанга - гиродин» относительно оси гравитационной штанги.
и соответственно происходит угловое движение механической системы «МКА - гравитационная штанга - гиродин» относительно оси гравитационной штанги.
На фиг. 3 показана условно разделенная на четыре квадранта некоторая площадь земной поверхности, содержащая объекты, которые необходимо просканировать с МКА. Они расположены в точках А и В. Аппарат сканирования, находящийся на МКА, с учетом точности гравитационной системы ориентации нацелен на точку 0.
Для нацеливания в точку А подключается датчик момента 7, который поворачивает МКА вокруг оси гравитационной штанги 2 таким образом, что вектор кинетического момента Н гиродина из положения Н0 переводится в положение НI-III. Таким образом, точка А оказывается на линии, перпендикулярной вектору кинетического момента Н, а далее включается управляемый по скорости гиро двигатель 3. За счет появления электромеханического момента аппаратура МКА нацеливается на положение, обозначенное точкой А (либо на другую точку, находящуюся в квадрантах I и III).
Для нацеливания МКА в квадранты II и IV вектор кинетического момента Н гиродина из положения Н0 переводится в положение HII-IV, и гиродвигатель 3 нацеливает аппаратуру в точку В или какую-либо другую точку, расположенную в квадрантах II и IV.
Отключение электропитания от датчика момента по команде с блока управления прекращает механическое воздействие на МКА  , стабилизация углового положения спутника осуществляется гравитационным моментом, создаваемым гравитационной штангой 2, и кинетическим моментом Н гироскопа. Возврат вектора кинетического момента гиродина в положение Н0 осуществляется автоматически по закону прецессии теории гироскопов.
, стабилизация углового положения спутника осуществляется гравитационным моментом, создаваемым гравитационной штангой 2, и кинетическим моментом Н гироскопа. Возврат вектора кинетического момента гиродина в положение Н0 осуществляется автоматически по закону прецессии теории гироскопов.
В период штатной работы аппаратуры данная система ориентации имеет возможность программного наведения МКА на заданную цель с требуемой точностью. Точность большинства гравитационных систем ориентации составляет (5-10)°, а комбинированная система ориентации в активном режиме в принципе может обеспечить точность до угловых минут.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ динамичной высокоточной ориентации и стабилизации космического аппарата | 2018 |
|
RU2702932C1 |
| Способ ориентации космического аппарата и устройство для реализации способа | 2016 |
|
RU2618664C1 |
| Способ управления движением космического аппарата с управляемой ориентацией | 2020 |
|
RU2767648C1 |
| Способ управления космическим аппаратом дистанционного зондирования Земли | 2019 |
|
RU2722598C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЦЕНТРА МАСС КОСМИЧЕСКОГО АППАРАТА В ПРОЦЕССЕ ЕГО УПРАВЛЕНИЯ С ПОМОЩЬЮ СИЛОВЫХ ПРИВОДОВ | 1997 |
|
RU2114031C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИНЕРЦИОННЫХ ХАРАКТЕРИСТИК КОСМИЧЕСКОГО АППАРАТА В ПРОЦЕССЕ УПРАВЛЕНИЯ С ПОМОЩЬЮ СИЛОВЫХ ГИРОСКОПОВ И РЕАКТИВНЫХ ДВИГАТЕЛЕЙ | 2001 |
|
RU2208559C1 |
| УСТРОЙСТВО ДЛЯ СТАБИЛИЗАЦИИ УГЛОВОГО ДВИЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 1992 |
|
RU2020113C1 |
| СПОСОБ СТАБИЛИЗАЦИИ УГЛОВОГО ДВИЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА С УПРУГИМИ ВЫНОСНЫМИ ЭЛЕМЕНТАМИ | 1992 |
|
RU2020112C1 |
| СПОСОБ ОРИЕНТАЦИИ ЦЕЛЕВОЙ АППАРАТУРЫ КОСМИЧЕСКИХ АППАРАТОВ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2009 |
|
RU2412873C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА С УПРАВЛЯЕМОЙ ОРИЕНТАЦИЕЙ | 2017 |
|
RU2669481C1 |
Изобретение относится к системам стабилизации и управления ориентацией космических аппаратов (КА) и может найти применение для управлении угловым движением малого КА. Устройство представляет собой комбинированную систему управления, состоящую из самовыдвигающейся гравитационной штанги с концевым грузом и двухстепенного гироскопа с датчиком момента на оси подвеса, выполняющего функцию этого груза. Для управления КА по курсу используют указанный гироскоп в качестве гиродина, а для управления по углам крена и тангажа - в качестве электромеханического исполнительного органа (маховика). Техническим результатом изобретения является расширение функциональных возможностей системы и повышение точности ориентации КА. 3 ил.
Комбинированная гравитационная система ориентации МКА, содержащая самовыдвигающуюся гравитационную штангу с грузом в виде активного управляющего элемента, закрепленного на ее конце, отличающаяся тем, что для управления МКА по осям крена, рыскания и тангажа в роли груза используют двухстепенный гироскоп с датчиком момента на оси подвеса гиродвигателя с возможностью работы в качестве гиродина для создания управляющего гироскопического момента по курсу и в качестве электромеханического исполнительного органа - для создания управляющего момента по углам крена и тангажа.
| В.И | |||
| Попов | |||
| Системы ориентации и стабилизации космических аппаратов | |||
| М | |||
| "Машиностроение" | |||
| Пневматический водоподъемный аппарат-двигатель | 1917 |
|
SU1986A1 |
| П.И | |||
| Каргу | |||
| Системы угловой стабилизации космических аппаратов | |||
| М | |||
| "Машиностроение" | |||
| Способ получения фтористых солей | 1914 |
|
SU1980A1 |
| Б.В | |||
| Раушенбах, Е.Н | |||
| Токарь | |||
| Управление ориентацией космических аппаратов | |||
| "Наука" | |||
| М | |||
| ПРИБОР ДЛЯ ЗАПИСИ И ВОСПРОИЗВЕДЕНИЯ ЗВУКОВ | 1923 |
|
SU1974A1 |
| УСТРОЙСТВО ДЛЯ СТАБИЛИЗАЦИИ УГЛОВОГО ДВИЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 1992 |
|
RU2020113C1 |
| акад | |||
| С.П | |||
| Королева), 30.09.1994 | |||
| US 3567155 A (James A | |||
| Gatlin, et al.), 02.03.1971 | |||
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ | 0 |
|
SU195999A1 |

