Изобретение относится к роботостроению и представляет собой робототехнический аппаратно-программный комплекс, предназначенный, главным образом, для применения в деятельности правоохранительных сил по обеспечению общественной безопасности и противодействия терроризму.
Известны робототехнические комплексы, предназначенные для выполнения действий по обеспечению общественной безопасности и противодействия терроризму и включающие автономные агрегатированные на возимой или носимой платформе стационарные модули и мобильные модули, представляющие собой агрегатированные на колёсном, гусеничном или колёсно-гусеничном шасси самоходные аппаратно-программные системы, оснащённые навигационным оборудованием, сенсорными системами, видеосистемами, исполнительными органами-эффекторами и блоками управления в виде электронных вычислительных устройств для обработки потоков данных от сенсорной системы и навигационного оборудования и выработки управляющих сигналов-команд для исполнительных органов.
Известные робототехнические комплексы включают стационарные модули, выполненные в виде станций для зарядки аккумуляторных батарей или узлов обеспечения связи между мобильными модулями и оперативным штабом, и автономные мобильные модули, выполненные в виде различных по формам, компоновкам и размерам тележкоподобных четырёх- или более колёсных или гусеничных платформ с агрегатированными на них аппаратно-программными системами и манипуляционными механизмами с концевыми эффекторами различного вида, или в виде вертикальных тумбообразных конструкций, агрегатированных на колёсных шасси.
Тележкоподобные автономные мобильные робототехнические модули предназначены, главным образом, для обследования помещений в опасных или труднодоступных местах, патрулирования местности и периметров охраняемых участков местности или объектов. Для выполнения задач, связанных с физическими взаимодействиями с объектами внешней среды, подобные модули оснащаются соответствующими задаче исполнительными органами. Обычно такие модули применяются в режимах телеоператорного и/или супервизорного управления.
Недостатками подобных роботов являются, во-первых, неспособность действовать в режиме полной автономности из-за несовершенства систем распознавания ситуации, и, во-вторых, многоколёсные и гусеничные шасси не могут обеспечить движения модулей в режиме полного кинематического соответствия, вследствие чего модули не обладают достаточными для автономного применения управляемостью и наблюдаемостью управления. Неизбежные отклонения положения модулей в пространстве и отклонения траектории движения модулей в совокупности с ошибками системы распознавания приводят к неадекватным реальной ситуации манёврам модуля и применению его эффекторов, что представляет опасность как для самого модуля, так и для людей и объектов окружающей среды. Вследствие наличия указанных недостатков известные полицейские роботы тележечного исполнения недостаточно эффективны.
Тумбообразные мобильные модули робототехнических систем для выполнения полицейских функций предназначены, главным образом, для патрулирования помещений с ровными плоскими полами, в которых могут находиться люди. Недостатками таких модулей являются, кроме ограниченности передвижения, несовершенство систем распознавания ситуации и неизбежные из-за этого возможные неадекватные ситуации манёвры и иные действия модулей. Эти недостатки вынуждают придавать им вид тумб с гладкой поверхностью для снижения травмоопасности при возможных столкновения с людьми и окружающими предметами. Помимо этих недостатков, тумбообразная компоновка обусловливает низкую остойчивость и, соответственно, низкие динамические характеристики, вследствие чего такие модули не могут перемещаться со скоростью, превышающей скорость медленно идущего человека и не могут оснащаться эффективными манипуляторами и эффекторами с необходимыми для выполнения полицейских функций силомоментными характеристиками. Из-за этих недостатков подобные модули не обладают достаточной вандалоустойчивостью, поскольку их легко вывести из равновесия и/или обездвижить. Вследствие указанных недостатков тумбообразные полицейские роботы недостаточно эффективны.
Из уровня техники известны:
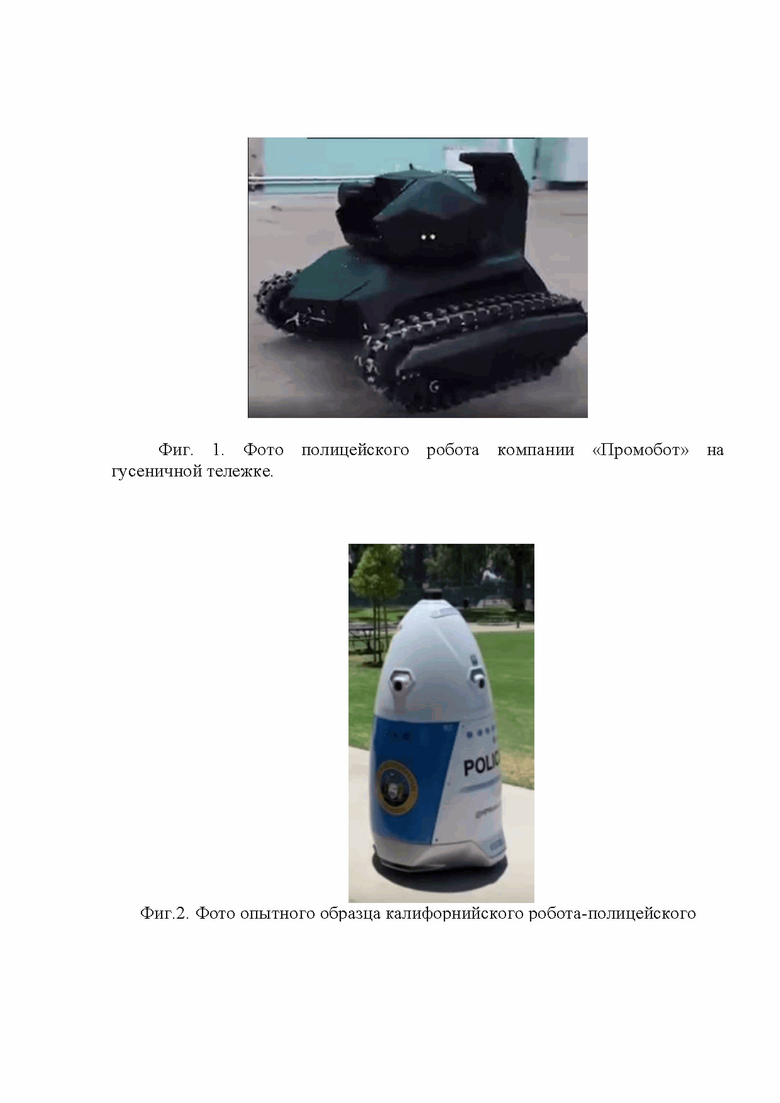
Наиболее типичным представителем тележечных полицейских роботов является полицейский робот «Скорпион» компании «Промобот», представленный на Фиг. 1. Он агрегатирован на гусеничной тележке, оснащён сетеметателем для обездвижения подозрительных лиц и иными средствами воздействия на нарушителей общественного порядка. Гусеничный движитель позволяет «Скорпиону» развивать высокую скорость и маневрировать в режиме бортового поворота. Применяется «Скорпион» только в телеоператорном режиме. Способ маневрирования бортовым поворотом затрудняет управляемость в условиях городского обустройства пространства. Гусеницы представляют серьёзную опасность для окружающих. Компоновка «Скорпиона» предоставляет множество возможностей для его блокировки и обездвижения посредством накидывания тросов и расклинивания гусениц.
Типичными представителями разновидности тумбообразных мобильных полицейских роботов являются представленный на Фиг. 2. калифорнийский робот-полицейский и российский полицейский робот компании «Промобот», представленный на Фиг. 3 и Фиг. 4.
И калифорнийский и российский тумбообразные роботы-полицейские - это мобильные сервисные роботы, рассчитанные на выполнение удалённого общения с людьми, распознавания лиц и речи, с возможностью подключения к любой внешней системе - базам данных, системе безопасности, сайтам и сервисам, могут оснащаться сканером отпечатков пальцев и системой распознавания лиц.
К этим изделиям в полной мере применимы указанные для тумбообразных роботов недостатки. Они тихоходны, неустойчивы, применимы исключительно в помещениях с гладкими ровными полами и невандалоустойчивы.
Заявленное изобретение направлено на достижение технического результата в виде повышения эффективности робототехнических систем, предназначенных для выполнения полицейских функций и/или оказания помощи правоохранительным органам и подразделениям по охране общественного порядка и предотвращения террористических актов.
Указанный технический результат достигается созданием мультиагентных полицейских робототехнических систем для применения в составе правоохранительных сил и подразделений Росгвардии при выполнении операций по предупреждению возникновения и подавления массовых уличных беспорядков и предотвращения осуществления террористических актов, отличающихся тем, что мобильные автономные модули системы выполняют на псевдоодноосных шасси с гусеничными движителями и динамическим управлением остойчивостью и оснащают противовандальными пассивными и активными системами, мортирами для отстрела светошумовых гранат и гранат со слезоточивым газом, сетеметательными мортирами, пеномётами, источниками высокого электрического напряжения с выведенными на поверхность корпуса электрошоковыми разрядниками, форсунками для распыления ирритантов и пламягасящих составов, манипуляторами с высокими силомоментными характеристиками и акустическими системами для речевого взаимодействия с личным составом правоохранительных сил и с участниками правонарушений.
Пассивную антивандальность мобильных модулей обеспечивают тем, что корпус модуля выполняют панциреобразным с обтекаемыми выступами на поверхности для выхода форсунок, высоковольтных разрядников, объективов видеосистем, динамиков громкоговорителей и манипуляторов. Шасси модулей выполняют в виде прикрытых панциреобразным корпусом сегментообразных гусеничных тележек с установленными с перекрытием опорными катками.
Мобильные модули выполняют двух видов: оперативных модулей для выполнения задач поиска, преследования и задержания отдельных нарушителей, и щитоносных заградительных роботов для блокировки больших групп нарушителей и разделения бесчинствующей толпы на части.
Оперативные роботы могут развивать скорость до 50-60 км/час и оснащены эффективными средствами видеонаблюдения, распознавания и обездвиживания нарушителей общественного порядка или разыскиваемых лиц.
Щитоносные заградительные роботы оснащают дополнительно укреплёнными на манипуляторах прочными щитами с устройствами сцепления с краями сопряжённых щитов соседних модулей и защиты от вандализма. Также в систему управления щитоносных роботов устанавливаются специальные программы управления созданием сплошных заградительных линий определённой конфигурации в заданном районе с учётом рельефа местности и особенностей застройки, озеленения и общего обустройства места расположения заградительной линии. Устройства сцепления щитов приводятся в действие при смыкании щитов, создавая сплошную неразрывную стену, оснащённую высоковольтными разрядниками и форсунками от баллонов с ирритантами. Собственная масса роботов используется для создания моментов сил противодействия попыткам обрушения заграждений.
Сегментообразные гусеничные тележки модулей придают роботам проходимость, маневренность и управляемость одноосных статически уравновешенных транспортных средств. Защитная оболочка, большинство элементов конструкции, гусеничные тележки и щиты роботов могут быть изготовлены из композитных материалов. Энергетическая установка может быть любой – от ДВС до электро- или пневмоаккумуляторной в зависимости от преимущественных задач и условий применения роботов.
Внешний вид известных полицейских роботов представлен на Фиг. 1, Фиг. 2, Фиг. 3 и Фиг. 4.
На Фиг. 1 представлено фото полицейского робота компании «Промобот» на гусеничной тележке, 1 – башня-надстройка с метательными устройствами; 2 – панель с видеосистемами; 3 – крышка ангара с квадрокоптером; 4 – гусеница.
На Фиг. 2 представлено фото опытного образца калифорнийского робота-полицейского (https://www.youtube.com/watch?v=_zed_Hsic74).
На Фиг. 3 представлено фото верхней части андроидного российского полицейского робота компании «Promobot».
На Фиг. 4 представлено фото андроидного робота-полицейского компании «Promobot».
На Фиг. 5 представлен образ цифровой модели оперативного модуля полицейского робототехнического комплекса для борьбы с уличными беспорядками. На Рис. обозначены: 5 – защитный корпус модуля с форсунками и разрядниками электрошокера; 6 – манипулятор в походном положении; 7 – гусеница.
На Фиг. 6 представлен цифровой образ вида спереди полицейского робота-заградителя с шитом заграждения в походном положении. На рис обозначены: 8 – заградительный щит в походном положении; 9 – актуаторы раздвижного устройства щита; 10 – манипуляторы для управления щитом.
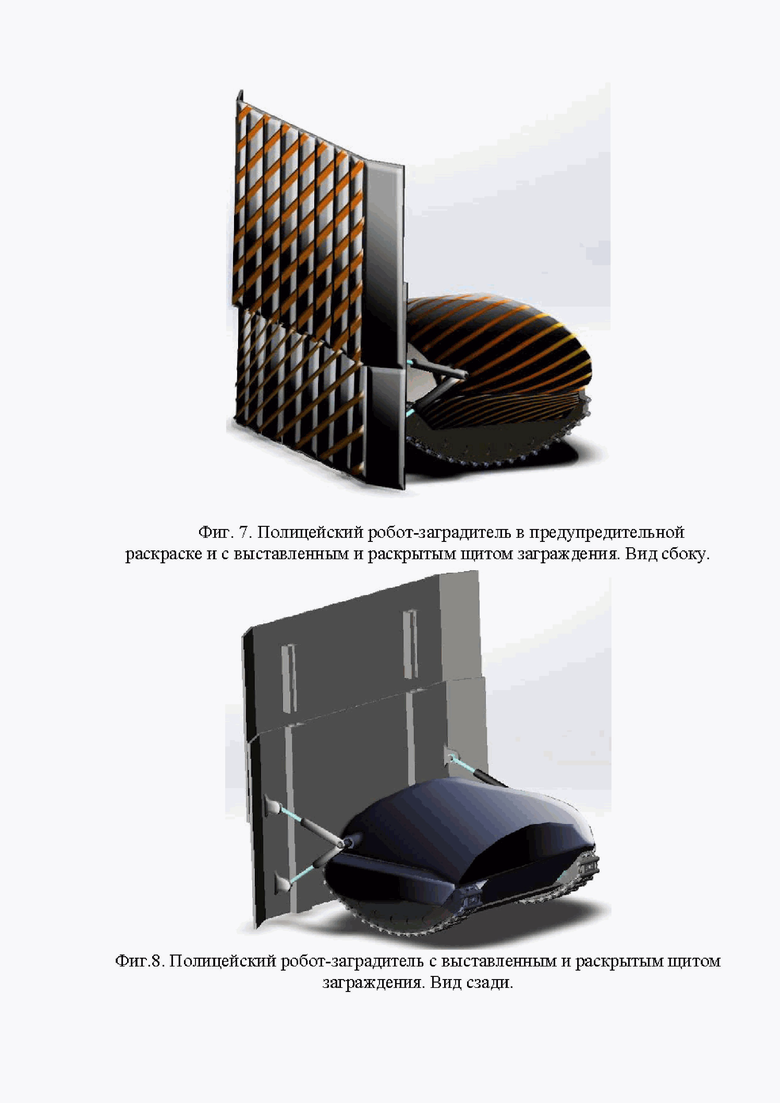
На Фиг. 7 представлен в виде сбоку цифровой образ полицейского робота-заградителя в предупредительной раскраске и с выставленным и раскрытым щитом заграждения, обозначены номером 11 раскрытые панели заградительного щита.
На Фиг. 8 представлен в виде сзади цифровой образ полицейского робота-заградителя с выставленным и раскрытым щитом заграждения.
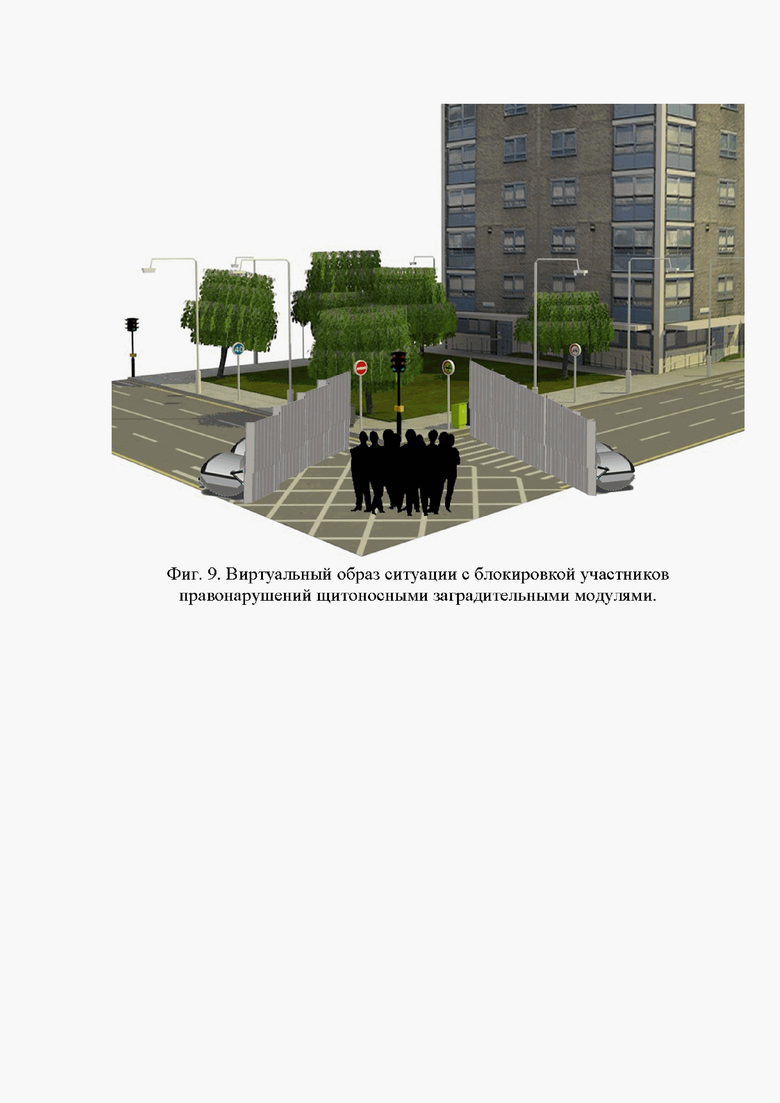
На Фиг. 9 представлен виртуальный образ процесса блокировки участников правонарушений щитоносными заградительными модулями: 12 – заграждения из щитов, установленных заградительными модулями робототехнического комплекса; 13 – группа блокированных граждан.
Новые полицейские робототехнические системы предназначены для использования в составе правоохранительных сил и Росгвардии при решении задач обеспечения безопасности и правопорядка, в особенности на массовых акциях и мероприятиях, а также подавления массовых уличных беспорядков, проведения задержаний и предотвращения террористических актов. В частности, для проведения задержания опознанных лиц или активных участников уличных беспорядков оперативные модули группами или поодиночке сближаются с объектом, посредством громкоговорящей связи предлагают ему прекратить противоправные действия и/или оставаться на месте до подхода личного состава правоохранительных сил. При неподчинении и/или попытки скрыться модуль настигает объект и накидывает на него ловчую сеть, или накрывает его зарядом быстротвердеющей пены. Особенности корпуса и шасси оперативного модуля позволяют ему проникать в толпу, преодолевать препятствия и развивать скорость, превышающую скорость любого человека-пешехода или всадника на лошади при любых попытках создать помехи передвижению модуля.
При выполнении действий по предотвращению совершения террористических актов оперативный модуль/модули отдельно или в согласованных действиях с заградительными модулями блокируют подозреваемое лицо/лица и создают защитные ограждения для обеспечения безопасности населения.
Главная особенность систем – способность выполнять заданную миссию в режиме согласованных коллективных действий. Важнейший эффект от применения систем – исключение непосредственного контакта личного состава сил правоохранения с участниками беспорядков. Для этого в систему управления принятием решений модулей робототехнической системы устанавливают программу/программы локального взаимодействия модулей на основе «осиного» или какого-либо иного актуального биоинспирированного алгоритма.
| название | год | авторы | номер документа |
|---|---|---|---|
| Робототехнический комплекс для безлюдного возведения строений/укрытий на Луне | 2020 |
|
RU2751836C1 |
| Мультиагентный робототехнический поисково-спасательный комплекс | 2021 |
|
RU2773987C1 |
| Высокомобильный транспортный робот для перемещения палетированных грузов | 2022 |
|
RU2798652C1 |
| Мобильный робот-помощник | 2021 |
|
RU2810399C2 |
| Сервисный мобильный робот и комплект монтируемых на обслуживаемых объектах устройств для обмена сменными модулями и жидкими материалами | 2023 |
|
RU2840834C2 |
| МОБИЛЬНАЯ АВТОНОМНАЯ РОБОТОТЕХНИЧЕСКАЯ ПЛАТФОРМА С БЛОЧНОЙ ИЗМЕНЯЕМОЙ СТРУКТУРОЙ | 2019 |
|
RU2704048C1 |
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС РАЗВЕДКИ И ОГНЕВОЙ ПОДДЕРЖКИ | 2013 |
|
RU2548207C1 |
| Высокоподвижный исследовательский планетоход | 2022 |
|
RU2780069C1 |
| Беспилотный авиационный робототехнический комплекс для внесения пестицидов | 2022 |
|
RU2779780C1 |
| Мобильный робототехнический комплекс | 2015 |
|
RU2612115C1 |

Изобретение относится к роботостроительной отрасли и предназначено, главным образом, для использования в составе правоохранительных сил и подразделений Росгвардии при выполнении действий по обеспечению общественной безопасности и противодействия терроризму. В отличие от известных полицейских робототехнических систем изобретение включает высокоподвижные и высокоманевренные вандалоустойчивые автономные мобильные модули, оснащённые пассивными и активными средствами противодействия попыткам нанести повреждения оборудованию модулей или обездвижить модули. Для этого модули выполняют в обтекаемом без выступов корпусе, прикрывающем оборудование и сегментообразные гусеничные движители шасси. Новый робототехнический полицейский комплекс включает группы модулей различного назначения – быстроходные высокоманевренные оперативные модули для рассекания толпы и задержания отдельных нарушителей или блокировки подозреваемых в попытках совершения террористического акта лиц и щитоносные заградительные модули для создания разградительных стен и предотвращения прямого столкновения личного состава правоохранительных сил с участниками беспорядков. Главная особенность новой робототехнической системы противодействия правонарушениям и терроризму заключается в способности выполнять заданную миссию в режиме согласованных коллективных действий автономных модулей комплекса. Для этого в систему управления принятием решений модулей робототехнической системы устанавливают программу/программы локального взаимодействия модулей. 4 з.п. ф-лы, 9 ил.
1. Робототехнический комплекс для выполнения действий по обеспечению общественной безопасности и противодействия терроризму, включающий автономные агрегатированные на возимой или носимой платформе стационарные модули и мобильные модули в виде агрегатированных на гусеничном шасси самоходных аппаратно-программных систем, оснащённых навигационным оборудованием, сенсорными системами, видеосистемами, исполнительными органами-эффекторами и блоками управления в виде электронных вычислительных устройств для обработки потоков данных от сенсорной системы и навигационного оборудования и выработки управляющих сигналов-команд для исполнительных органов, отличающийся тем, что мобильные модули робототехнической системы выполнены с возможностью динамического управления устойчивостью, снабжены системой управления принятием решений, в которой установлена программа локального взаимодействия мобильных модулей, причем мобильные модули оснащены противовандальными пассивными и активными системами, мортирами для отстрела светошумовых гранат и гранат со слезоточивым газом, сетеметательными мортирами, пеномётами, источниками высокого электрического напряжения с выведенными на поверхность корпуса электрошоковыми разрядниками, форсунками для распыления ирритантов и пламягасящих составов, манипуляторами и акустическими системами для речевого взаимодействия с личным составом правоохранительных сил и с участниками правонарушений, а для обеспечения пассивной антивандальности корпус каждого мобильного модуля выполнен панциреобразным и оснащен обтекаемыми выступами на поверхности для выхода форсунок, высоковольтных разрядников, объективов видеосистем, динамиков громкоговорителей и манипуляторов, причем гусеничное шасси мобильных модулей выполнено в виде прикрытых упомянутым панциреобразным корпусом сегментообразных гусеничных тележек с установленными с перекрытием опорными катками.
2. Робототехнический комплекс по п.1, отличающийся тем, что мобильные модули выполнены в виде оперативных модулей, предназначенных для выполнения задач поиска, преследования и задержания отдельных нарушителей, и в виде заградительных модулей, оснащённых щитами для блокировки больших групп нарушителей и разделения бесчинствующей толпы на части.
3. Робототехнический комплекс по п.2, отличающийся тем, что щиты заградительных модулей выполнены раздвижными, с встроенными для этого актуаторами, и снабжены устройствами сцепления для создания сплошной неразрывной стены.
4. Робототехнический комплекс по п.2, отличающийся тем, что щиты заградительных модулей оснащены высоковольтными разрядниками и форсунками от баллонов с ирритантами.
5. Робототехнический комплекс по п.2, отличающийся тем, что заградительные модули выполнены таким образом, что их собственная масса создает моменты сил, противодействующие попыткам обрушения заграждений силами групп правонарушителей.
| МОБИЛЬНЫЙ РОБОТ | 2014 |
|
RU2544434C1 |
| US 20070086190 A1, 19.04.2007 | |||
| US 20150202770 A1, 23.07.2015 | |||
| US 20040094134 A1, 20.05.2004 | |||
| 0 |
|
SU402838A1 | |
| ПРИЕМНИК ВОЗДУШНОГО ДАВЛЕНИЯ | 1975 |
|
SU547089A1 |
| US 8256542 B2, 04.09.2012 | |||
| US 8594844 B1, 26.11.2013 | |||
| US 8201649 B2, 19.06.2012 | |||
| Электрошоковый модуль и щит для подавления беспорядков, использующий данный модуль | 2017 |
|
RU2652496C1 |

