Изобретение относятся к средствам автоматизации на железнодорожном транспорте, в частности, к системам автоматической локомотивной сигнализации.
Известно устройство регистрации сигналов автоматической локомотивной сигнализации, содержащее установленные в корпусе микроконтроллер, блок аналого-цифрового преобразования, включенный между первым входом устройства, предназначенным для подключения устройства к выводам локомотивных катушек приема сигналов системы автоматической локомотивной сигнализации, и первым информационным входом микроконтроллера, соответствующими выходами подключенного к входам съемного носителя памяти и блока индикации, элементы индикации которого расположены на лицевой панели корпуса, и блок питания, другие информационные входы микроконтроллера подключены через блок согласования ко второму входу устройства, предназначенного для подключения к CAN-шине локомотивного устройства безопасности, а программное обеспечение микроконтроллера выполнено с возможностью регистрации на носитель памяти синхронизированных по времени CAN-сообщений от локомотивного устройства безопасности и сигналов автоматической локомотивной сигнализации от локомотивных приемных катушек (RU 118935 U1, B61L 25/00, 10.08.2012).
Известное устройство обеспечивает запись на съемный носитель памяти синхронизированных по времени сообщений, синхронизированных по времени CAN-сообщений от локомотивного устройства безопасности и сигналов АЛС от локомотивных катушек с их привязкой к координатам местоположения локомотива.
Недостатком известного устройства является отсутствие возможности предварительного анализа синхронизированных по времени CAN-сообщений от локомотивного устройства безопасности и сигналов АЛС от локомотивных катушек для выявления сбоев кодов АЛС и отступлений в работе устройств АЛС.
В качестве прототипа принято устройство регистрации сигналов автоматической локомотивной сигнализации, содержащее установленные в корпусе процессор, блок аналого-цифрового преобразования, включенный между входом устройства, предназначенным для подключения устройства к локомотивным катушкам приема сигналов системы автоматической локомотивной сигнализации, и первым входом процессора, подключенного выходом - к входу модуля индикации, элементы индикации которого расположены на лицевой панели корпуса, CAN-трансивер, включенный между входом/выходом устройства, предназначенным для подключения к CAN-шине локомотивного устройства безопасности, и первым выходом/входом процессора, второй выход/вход которого соединен с входом/выходом Ethernet-трансивера, другие входы/выходы которого подключены ко выходу/входу устройства, предназначенного для подключения к бортовому радиомодему, и блок питания, вход которого подключен к выходу устройства, предназначенного для подключения к шине питания локомотивного устройства безопасности, при этом программное обеспечение процессора выполнено с возможностью анализа синхронизированных по времени CAN-сообщений от локомотивного устройства безопасности и сигналов АЛС от локомотивных катушек для выявления сбоев кодов АЛС с привязкой к цифровой модели пути и отступлений в работе устройств АЛС, формирования во внутренней энергонезависимой памяти отдельных блоков данных о CAN-сообщениях, о сигналах АЛС, а также о выявленных сбоях кодов АЛС с привязкой их к цифровой модели пути и об отступлениях в работе устройств АЛС и передачи в режиме реального времени во внешние системы сообщений о выявленных сбоях кодов АЛС и отступлениях в работе устройств АЛС с привязкой их к цифровой модели пути (RU 190653, B61L 25/00, 08.07.2019).
Известное устройство не достаточно защищает систему управления движением поездов от ложных решений о необходимости ремонта локомотивного приемника.
Статистически существует зависимость вероятности неправильного распознавания каждого элемента паттерна кодового сигнала АЛС (импульса или паузы) от соотношения мгновенных амплитуд сигнала и помехи на входе локомотивного приемника. Если это соотношение снижается до некоторого значения, то вероятность неправильного выделения импульса или паузы в паттерне кодового сигнала АЛС возрастает до такой степени, что вероятность ошибочного восприятия всего паттерна сигнала АЛС превышает назначенную допустимую величину. Причиной искажений воспринимаемого локомотивным приемником кодового сигнала и соответственно его сбоев при приеме сигналов АЛС может являться неисправная работа путевых формирователей кода АЛС в рельсовых цепях или неисправная работа схемы приемного тракта самого локомотивного приемника. Отличие этих ситуаций со сбоями проявляется, в частности, в том, что сбои, при приеме сигналов АЛС из-за неправильной работы приемного тракта локомотивного приемника возникают на произвольных участках конкретного маршрута движения локомотива, а сбои по причине неисправной работы путевых формирователей кода АЛС возникают в основном только когда локомотив находится на рельсовых цепях, где в самом деле неисправна путевая аппаратура формирования кодов АЛС. Классификация этих сбойных ситуаций на две отдельные группы позволяет обоснованно решить вопрос о необходимости снятия локомотива с маршрутов для направления его на пункт технического обслуживания (ТО) или только ограничиться ремонтом и регулировкой аппаратуры конкретных рельсовых цепей.
Известное локомотивное устройство регистрации сигналов автоматической локомотивной сигнализации эту функцию классификации не позволяет выполнять с необходимой надежностью из-за того, что данные о работе схемы приемного тракта локомотивного приемника АЛС анализируются в центре ТО, т.е. только после прибытия локомотива на проверку в центр ТО. До этого времени информация, передаваемая из локомотивных устройств в центры ТО по каналу радиосвязи, ограничена в объеме. Ограниченность информации передаваемой в пункт ТО связана с ограничениями объема данных, передаваемых по каналу радиосвязи с локомотива в центр ТО, по сравнению с более подробными надежными и своевременными данными, которые доступны непосредственно на локомотиве процессору его бортового устройства, через шину CAN межмодульного интерфейса локомотива.
Например, в радиоканал с локомотива не передаются подробные данные о текущих амплитудах сигнала и помехи на входе локомотивного приемника, поскольку это большие объемы информации, перегружающие сеть радиосвязи. Эти данные невозможно передавать слишком часто и с малой временной задержкой для требуемого достоверного выявления потенциальных сбойных ситуаций.
В ряде случаев, связь с пунктом ТО по радиоканалу может надолго прерываться. Для некоторых подвижных единиц рельсового транспорта (ремонтные дрезины и т.п.) связь во время поездки может вообще отсутствовать из-за недостаточного объема бортового оборудования.
Ошибочное снятие локомотива с маршрута для проведения его технического обслуживания на пункте ТО снижает эффективность работы системы управления движением поездов.
Технический результат изобретения заключается в повышении достоверности определения неисправности локомотивного приемника и отделении неисправностей локомотивного приемника от неисправностей аппаратуры формирования кодов АЛС в рельсовых цепях по маршруту движения поезда.
Технический результат достигается тем, что устройство регистрации сигналов автоматической локомотивной сигнализации, содержащее установленные в корпусе процессор, между входом устройства, предназначенным для подключения локомотивных катушек приема сигналов системы автоматической локомотивной сигнализации и первым входом процессора включены последовательно соединенные фильтр низких частот и аналого-цифровой преобразователь, к выходу процессора подключен вход модуля индикации, элементы индикации которого расположены на лицевой панели корпуса, CAN-трансивер, включенный между входом/выходом устройства, предназначенным для подключения к CAN-шине локомотивного устройства безопасности, и первым входом/выходом процессора, второй вход/выход которого соединен с выходом/входом Ethernet-трансивера, другие входы/выходы которого подключены к выходу/входу устройства, предназначенного для подключения к бортовому радиомодему, и блок питания, вход которого подключен к выходу устройства для подключения к шине питания локомотивного устройства безопасности, при этом программное обеспечение процессора выполнено с возможностью анализа синхронизированных по времени CAN-сообщений от локомотивного устройства безопасности и сигналов АЛС от локомотивных катушек для выявления сбоев кодов АЛС с привязкой к цифровой модели пути и отступлений в работе устройств АЛС, формирования во внутренней энергонезависимой памяти отдельных блоков данных о CAN-сообщениях, о сигналах АЛС, а также о выявленных сбоях кодов АЛС с привязкой их к цифровой модели пути и об отступлениях в работе устройств АЛС и передачи в режиме реального времени во внешние системы сообщений о выявленных сбоях кодов АЛС и отступлениях в работе устройств АЛС с привязкой их к цифровой модели пути, согласно изобретению снабжено модулем фиксатора уровня сигнала, первый вход которого соединен с выходом аналого-цифрового преобразователя, а второй вход соединен с выходом модуля бортовой электронной карты, выход модуля фиксатора уровня сигнала соединен с входом модуля памяти, выход которого подключен к первому входу модуля сравнения, второй вход которого соединен с выходом модуля памяти контрольных сигналов, выход модуля сравнения соединен со вторым входом процессора, третий вход/выход которого соединен с входом/выходом блока анализа данных, вход/выход которого соединен с входом/выходом блока принятия решения, первый и второй выходы которого соединены соответственно с третьим и четвертым входами процессора.
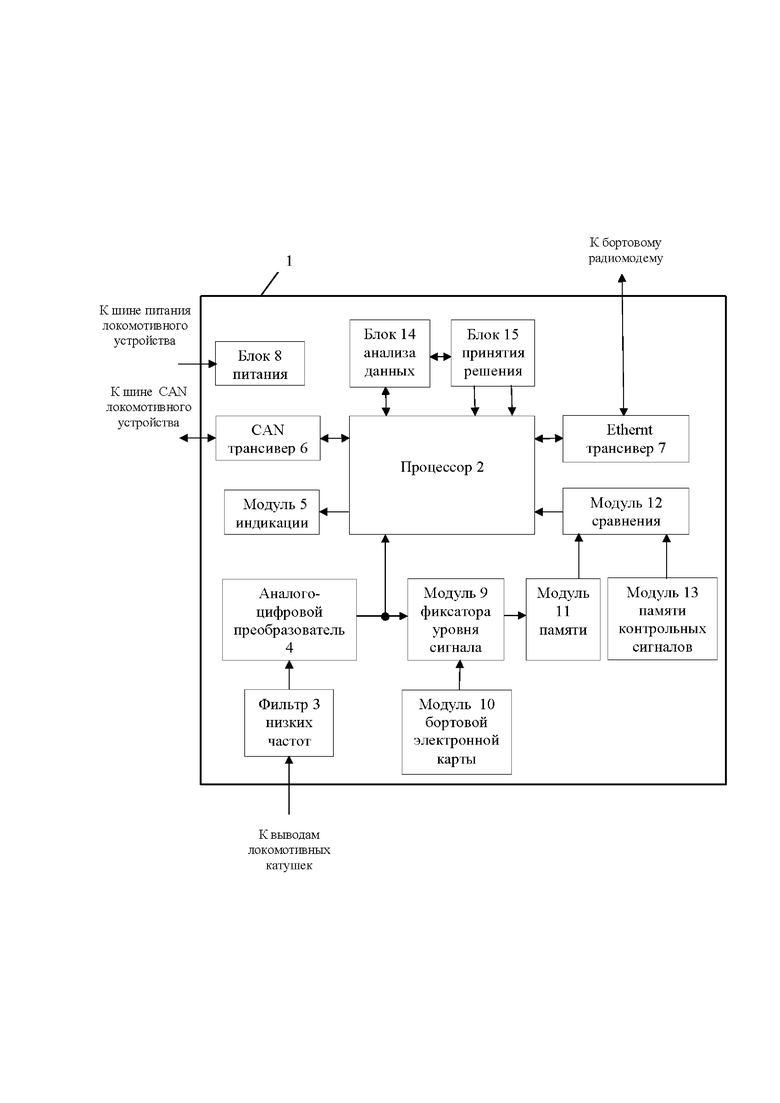
На чертеже приведена функциональная схема устройства регистрации сигналов автоматической локомотивной сигнализации.
Устройство регистрации сигналов автоматической локомотивной сигнализации содержит установленные в корпусе 1 процессор 2, между входом устройства, предназначенным для подключения локомотивных катушек приема сигналов системы автоматической локомотивной сигнализации и первым входом процессора 2 включены последовательно соединенные фильтр 3 низких частот и аналого-цифровой преобразователь 4, к выходу процессора 2 подключен вход модуля 5 индикации, элементы индикации которого расположены на лицевой панели корпуса 1, CAN-трансивер 6, включенный между входом/выходом устройства, предназначенным для подключения к CAN-шине локомотивного устройства безопасности, и первым входом/выходом процессора 2, второй вход/выход которого соединен с выходом/входом Ethernet-трансивера 7, другие входы/выходы которого подключены к выходу/входу устройства, предназначенного для подключения к бортовому радиомодему, и блок 8 питания, вход которого подключен к выходу устройства для подключения к шине питания локомотивного устройства безопасности, при этом программное обеспечение процессора 2 выполнено с возможностью анализа синхронизированных по времени CAN-сообщений от локомотивного устройства безопасности и сигналов АЛС от локомотивных катушек для выявления сбоев кодов АЛС с привязкой к цифровой модели пути и отступлений в работе устройств АЛС, формирования во внутренней энергонезависимой памяти отдельных блоков данных о CAN-сообщениях, о сигналах АЛС, а также о выявленных сбоях кодов АЛС с привязкой их к цифровой модели пути и об отступлениях в работе устройств АЛС и передачи в режиме реального времени во внешние системы сообщений о выявленных сбоях кодов АЛС и отступлениях в работе устройств АЛС с привязкой их к цифровой модели пути, модуль 9 фиксатора уровня сигнала, первый вход которого соединен с выходом аналого-цифрового преобразователя 4, а второй вход соединен с выходом модуля 10 бортовой электронной карты, выход модуля 9 фиксатора уровня сигнала соединен с входом модуля 11 памяти, выход которого подключен к первому входу модуля 12 сравнения, второй вход которого соединен с выходом модуля 13 памяти контрольных сигналов, выход модуля 12 сравнения соединен со вторым входом процессора 2, третий вход/выход которого соединен с входом/выходом блока 14 анализа данных, вход/выход которого соединен с входом/выходом блока 15 принятия решения, первый и второй выходы которого соединены соответственно с третьим и четвертым входами процессора 2.
Устройство регистрации сигналов автоматической локомотивной сигнализации работает следующим образом.
Перед началом движения поезда соответствующие входы устройства регистрации сигналов автоматической локомотивной сигнализации подключают к шине питания и CAN-шине локомотивного устройства безопасности, а также к бортовому радиомодему.
При начале движения поезда, оборудованного локомотивными устройствами безопасности, участвующими в информационном обмене по протоколу CAN по контролируемому маршруту, происходит инициализация всех трансиверов локальной сети CAN. При этом в автоматическом режиме подается напряжение на вход блока 8 питания. Блок 8 питания осуществляет преобразование поступающего на его вход напряжения в напряжение питания всех элементов устройства и их гальваническую развязку с цепями устройства безопасности. При этом модуль 5 индикации сигнализирует о включении устройства регистрации сигналов АЛС.
Сообщения с каналов CAN-шины локомотивного устройства безопасности поступают через CAN-трансивер 6 на соответствующий вход/выход процессора 2. CAN-сообщения включают данные о текущем времени, параметрах движения и координатах поезда, зарегистрированных действиях машиниста, режимах работы бортового оборудования и состоянии локомотивного устройства безопасности.
CAN-трансивер 6 содержит последовательно соединенные CAN-формирователь и гальваническую развязку, при этом входом/выходом CAN-трансивера 6 является вход/выход CAN-формирователя, а его выходом/входом - выход/вход гальванической развязки.
Модуль индикации 5 включает дисплей для отображения сообщений машинисту и элементы индикации состояния и режимов работы устройства.
USB-порт процессора 2 подключен к выходу устройства, предназначенного для подключения съемного носителя памяти в виде флеш-накопителя.
SPI или MCI-порт процессора 2 подключен к выходу устройства, предназначенного для подключения съемного носителя памяти в виде флеш-карты.
Такое подключение соответствующих портов процессора к указанным выходам устройства обеспечивает возможность параллельной записи данных на внешние съемные носители памяти, записанной в энергоинформационной памяти процессора информации для ее последующего экспертного анализа.
Модуль 5 индикации включает три светодиода, расположенные на лицевой панели прибора: зеленый, желтый и красный.
Светодиоды модуля 5 индикации определяют следующие признаки функционирования устройства:
- зеленый светодиод при свечении с небольшим мерцанием - включение блока 8 питания, устройство готово к работе;
- желтый светодиод в режиме мигания сигнализирует о записи CAN-сообщений в энергонезависимую память процессора 2;
- красный светодиод в режиме мигания сигнализирует о записи сигналов АЛС с приемных катушек в энергонезависимую память процессора 2.
Сигналы автоматической локомотивной сигнализации с выводов локомотивных катушек поступают на вход фильтра 3 низких частот, осуществляющего предварительную фильтрацию, и далее в аналого-цифровой преобразователь 4 (АЦП), который преобразует аналоговый сигнал от приемных катушек в цифровой код и передает его на информационный вход процессора 2, осуществляющего запись поступивших сигналов во внутреннюю энергонезависимую память.
При записи сигналов с выхода аналого-цифрового преобразователя 4 процессор 2 формирует RAW аудиофайлы, каждый из которых включает сигналы АЛС за заданный промежуток времени. Запись аудиофайлов во внутреннюю энергонезависимую память процессор 2 осуществляет в отдельный RAW файл.
При записи CAN-сообщений во внутреннюю энергонезависимую память, процессор 2 каждое CAN-сообщение коррелирует с аудиофайлом и конкретным номером буфера аудиофайла.
Причем процессор 2, для каждого сбоя полученные CAN-сообщения формирует в отдельный файл CAN-сообщений и записывает в ту же папку, что и аудио файл. Это позволяет процессору 2 при анализе полученных данных открывать аудиофайлы и просматривать сообщения CAN устройств безопасности во взаимной привязке.
По результатам анализа полученных данных процессор 2 формирует файл с карточкой, содержащей информацию о конкретном сбое.
Все три файла RAW, CAN и карточку сбоя процессор 2 записывает в отдельный архив.
Анализ сигналов автоматической локомотивной сигнализации и выявление ситуаций со сбоями кодов АЛС процессор 2 осуществляет в режиме реального времени.
При этом процессор 2 осуществляет проверку, связанную с отнесением сбоя к технологически (функционально) обоснованному, то есть обусловленному движением поезда по конкретному участку, или при известных условиях, которые негативно влияют на прием сигнала и приводят к сбою в работе автоматической локомотивной сигнализации.
После регистрации места окончания сбоя процессор 2 записывает во внутреннюю энергонезависимую память информацию об указанном сбое кодов, включающую место начала сбоя, место окончания сбоя, параметры поезда, характер сбоя, причина сбоя, фрагмент кодового сигнала, и передает ее через Ethernet-трансивер 7 на вход бортового модуля радиосвязи, для последующей передачи в автоматизированные системы, специализирующие на учете сбоев аппаратуры АЛС.
Кроме того, по результатам анализа CAN-сообщений процессор 2 выявляет ситуации с отступлениями в содержании устройств АЛС.
Для каждого события, связанного с обнаружением отступления в содержании устройств АЛС, процессор 2 регистрирует его параметры.
При этом для каждого события, связанного с обнаружением отступления в содержании устройств АЛС, процессор 2 формирует из потока входных данных CAN-сообщений отрывок записи сигнала АЛС продолжительностью 5 секунд до и 5 секунд после места (времени) начала зафиксированного события независимо от возможного появления других событий. Информацию об указанном событии (место (время) начала и об окончания отступления, причину отступления) процессор 2 записывает во внутреннюю энергонезависимую память.
Внутренняя энергонезависимая память процессора 2 включает в директории ROOT следующие поддиректории:
- для непрерывной записи сигнала АЛС и информационного обмена системы обеспечения безопасности;
- для регистрации сбоев, в виде отрезков записи сигнала АЛС и информационного обмена по шине CAN;
- для регистрации отступлений, в виде отрезков записи сигнала АЛС и информационного обмена по шине CAN.
Также информация о выявленных ситуациях с отступлениями в содержании устройств АЛС передается через Ethernet-трансивер 7 на вход бортового модуля радиосвязи для последующей передачи в автоматизированные системы, специализирующие на учете сбоев аппаратуры АЛС.
При подключении внешнего съемного носителя к соответствующему выходу устройства, связанного с USB или SPI или MCI портом процессора 2, осуществляется копирование информации с его внутренней энергонезависимой памяти в память съемного носителя.
Таким образом, предлагаемое устройство регистрации сигналов АЛС позволяет осуществить прием, обработку, анализ, регистрацию и дальнейшую оперативную передачу поступающей информации о принимаемых на борту сигналах автоматической локомотивной сигнализации, обеспечить синхронизацию этих данных с событиями, связанным с изменением режимов работы бортового оборудования, с изменением поездной ситуации и действиями локомотивной бригады, установить предварительные причины выявленных сбоев и отступлений в работе автоматической локомотивной сигнализации, обеспечить достаточно точную привязку зафиксированных событий, связанных с нарушением работы локомотивной сигнализации, к шкале единого системного времени и цифровой модели пути.
Предлагаемое устройство выявляет сбои кодов, ставшие причиной переключения сигналов локомотивного светофора, а также выявляет отступления в работе автоматической локомотивной сигнализации, которые определяются отклонением параметров передаваемого сигнала от нормируемых показателей.
Для описания сбоев кодов используются следующие параметры: место начала сбоя, место окончания сбоя, параметры поезда, характер сбоя, причина сбоя, фрагмент кодового сигнала.
Место начала сбоя кодов характеризует момент времени, соответствующая ему координата и номер пути, идентификатор участка (станции/перегона), литер ближайшего светофора, связанные с проявлением первого после предшествовавшего устойчивого и работоспособного состояния устройств АЛС сбоя кодов. Под координатой следует понимать набор параметров, состоящий из географических координат, железнодорожной координаты (км/пк/м) и идентификатора рельсовой цепи.
Место окончания сбоя характеризует момент времени, соответствующая ему координата и номер пути, идентификатор участка (станции/перегона), зафиксированные после истечения 25 секунд от места начала сбоя кодов или после проследования поездом рельсовой цепи, на которой было зафиксировано место начала сбоя кодов.
Параметры поезда включают локомотивные, поездные характеристики, а также параметры движения поезда по участку, среди которых номер поезда, номер локомотива (секции), табельный номер машиниста, скорость движения поезда, режим движения поезда (тяга/выбег), состояние вспомогательного оборудования.
Характер сбоя - одно из перечисленных в описании сбоев кодов изменение показаний блока индикации локомотивного устройства безопасности.
Причина сбоя - вероятная, причина возникновения сбоев кодов, экспериментально установленная в соответствии с разработанным алгоритмом анализа входного сигнала АЛС.
Программное обеспечение процессора 2 обеспечивает возможность выявления следующих причин сбоев кодов:
- амплитуда кодового тока АЛС в рельсах не соответствует нормируемому показателю;
- сигнал АЛС на кодируемом участке пути отсутствует;
- временные параметры первого интервала кода АЛС не соответствуют норме;
- отсутствует возможность дешифрировать сигнал АЛС;
- сбой в работе модуля приемника;
- сбой в работе модуля центрального обработчика локомотивного устройства безопасности;
- отсутствие данных в CAN-шине.
В отдельных случаях причина сбоя может косвенно или прямо указывать на источник ее возникновения или непосредственно на неисправное устройство.
Дополнительно программное обеспечение процессора 2 осуществляет регистрацию отступлений в содержании устройств АЛС в качестве причины потенциального сбоя, которая по факту не привела к появлению сбоя из-за удержания показаний блоком индикации локомотивного устройства безопасности, что позволяет выявить и зарегистрировать предотказное состояние устройств АЛС.
Фрагмент кодового сигнала характеризует цифровую запись фрагмента принятого на борту сигнала АЛС общей продолжительностью в диапазоне 15 секунд до и 25 секунд после места (времени) начала сбоя кодов и 5 секунд до и 5 секунд после места (времени) начала отступления.
Бортовой приемник выполняет функцию непрерывного приема сигналов АЛС, обеспечивая их первичную фильтрацию и подготовку к дальнейшему анализу. Это позволяет реагировать на любые изменения в сигнальной информации, что является ключевым для обеспечения безопасности движения.
Модуль 9 фиксатора уровня сигнала используется для глубокого анализа принятых сигналов. Данный модуль не только определяет текущий уровень сигнала, но и выявляет потенциальные сбойные ситуации, а также оценивает исправность компонентов системы, таких как фидер и уровень подвеса катушек.
В случае обнаружения штатной работы или сбоя, модуль 9 фиксатора уровня сигнала интегрирует полученные данные с информацией о местоположении из модуля 10 бортовой электронной карты. Это позволяет осуществлять точную информационную привязку диагностических данных к конкретным участкам железнодорожного полотна.
Модуль 11 памяти обеспечивает запись данных текущей поездки и их уникальную адресацию в информационном пространстве. Это создает основу для построения исторической базы данных поездок, облегчая процесс анализа и оптимизации маршрутов.
Модуль 12 сравнения, взаимодействуя с модулем 11 памяти и модулем 13 памяти контрольных сигналов, осуществляет комплексный анализ истории поездок, уровней сигналов и сбоев. Это позволяет выявлять закономерности и предсказывать потенциальные проблемные участки на железнодорожном полотне.
Модуль 12 сравнения проводит глубокий анализ записанных сигналов на предмет наличия сбойных паттернов, что значительно повышает эффективность идентификации неисправностей.
По результатам анализа данных блоком 14, блок 15 принятия решения на основе заданного алгоритма формирует на первом выходе информацию с рекомендациями по проверке и обслуживанию бортовых, а на втором выходе информацию с рекомендациями по проверке и обслуживанию стационарных устройств АЛС. Рекомендации отображаются на дисплее модуля 5 индикации и передаются через бортовой радиомодем в центр диспетчерского управления. Это обеспечивает возможность своевременного принятия мер по предотвращению аварийных ситуаций и повышению надежности работы железнодорожного транспорта и избежать не оправданных снятий с маршрута локомотивов с исправными устройствами АЛС.
Предлагаемое устройство обеспечивает более высокий уровень безопасности и эффективности эксплуатации железнодорожного транспорта за счет оперативного и достоверного комплексного анализа и обработки сигналов АЛС, а также их информационной привязки к местоположению и историческим данным.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство бортовой аппаратуры автоматической локомотивной сигнализации | 2017 |
|
RU2653667C1 |
| Система передачи ответственной информации о маршрутах приема/отправления и кодах АЛС | 2018 |
|
RU2701274C1 |
| СИСТЕМА ОБМЕНА ДАННЫМИ ЛОКОМОТИВНЫХ СИСТЕМ С СЕРВЕРОМ ОТВЕТСТВЕННОЙ ИНФОРМАЦИИ С ИСПОЛЬЗОВАНИЕМ ЭЛЕКТРОННОЙ ПОДПИСИ | 2014 |
|
RU2572284C1 |
| КОМПЛЕКСНОЕ УСТРОЙСТВО БЕЗОПАСНОГО ИНФОРМАЦИОННОГО ОБМЕНА И КОНТРОЛЯ ЛОКОМОТИВНЫХ И СТАЦИОНАРНЫХ УСТРОЙСТВ БЕЗОПАСНОСТИ НА ЖЕЛЕЗНОДОРОЖНОМ ТРАНСПОРТЕ | 2014 |
|
RU2577936C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ | 2012 |
|
RU2508218C1 |
| Система для регулирования движения поездов | 2022 |
|
RU2791774C1 |
| Способ управления рельсовым транспортным средством и система для его реализации | 2024 |
|
RU2830326C1 |
| СИСТЕМА ПЕРЕДАЧИ ОТВЕТСТВЕННОЙ ИНФОРМАЦИИ О МАРШРУТАХ ПРИЕМА/ОТПРАВЛЕНИЯ И КОДАХ АЛС | 2015 |
|
RU2601085C1 |
| Устройство для регулирования движения поездов | 2018 |
|
RU2679795C1 |
| БЕЗОПАСНЫЙ ЛОКОМОТИВНЫЙ ОБЪЕДИНЕННЫЙ КОМПЛЕКС | 2011 |
|
RU2475396C1 |
Изобретение относится к средствам автоматизации на железнодорожном транспорте. Устройство регистрации сигналов автоматической локомотивной сигнализации содержит процессор, фильтр низких частот, аналого-цифровой преобразователь, модуль индикации, CAN-трансивер, Ethernet-трансивер, блок питания, модуль фиксатора уровня сигнала, модуль бортовой электронной карты, модуль памяти, модуль сравнения и модуль памяти контрольных сигналов. При этом программное обеспечение процессора выполнено с возможностью анализа синхронизированных по времени CAN-сообщений от локомотивного устройства безопасности и сигналов АЛС от локомотивных катушек для выявления сбоев кодов АЛС с привязкой к цифровой модели пути и отступлений в работе устройств АЛС, формирования во внутренней энергонезависимой памяти отдельных блоков данных о CAN-сообщениях, о сигналах АЛС, а также о выявленных сбоях и передачи во внешние системы сообщений о выявленных сбоях. Технический результат заключается в повышении достоверности определения неисправности локомотивного приемника и отделении неисправностей локомотивного приемника от неисправностей аппаратуры формирования кодов АЛС в рельсовых цепях. 1 ил.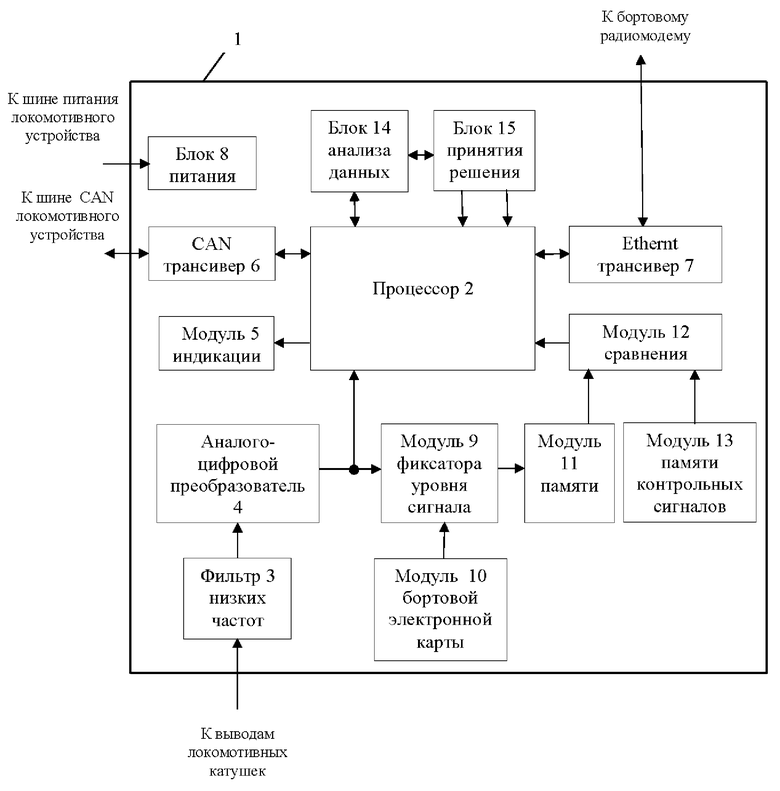
Устройство регистрации сигналов автоматической локомотивной сигнализации, содержащее установленный в корпусе процессор, между входом устройства, предназначенным для подключения локомотивных катушек приема сигналов системы автоматической локомотивной сигнализации, и первым входом процессора включены последовательно соединенные фильтр низких частот и аналого-цифровой преобразователь, к выходу процессора подключен вход модуля индикации, элементы индикации которого расположены на лицевой панели корпуса, CAN-трансивер, включенный между входом/выходом устройства, предназначенным для подключения к CAN-шине локомотивного устройства безопасности, и первым входом/выходом процессора, второй вход/выход которого соединен с выходом/входом Ethernet-трансивера, другие входы/выходы которого подключены к выходу/входу устройства, предназначенного для подключения к бортовому радиомодему, и блок питания, вход которого подключен к выходу устройства для подключения к шине питания локомотивного устройства безопасности, при этом программное обеспечение процессора выполнено с возможностью анализа синхронизированных по времени CAN-сообщений от локомотивного устройства безопасности и сигналов АЛС от локомотивных катушек для выявления сбоев кодов АЛС с привязкой к цифровой модели пути и отступлений в работе устройств АЛС, формирования во внутренней энергонезависимой памяти отдельных блоков данных о CAN-сообщениях, о сигналах АЛС, а также о выявленных сбоях кодов АЛС с привязкой их к цифровой модели пути и об отступлениях в работе устройств АЛС и передачи в режиме реального времени во внешние системы сообщений о выявленных сбоях кодов АЛС и отступлениях в работе устройств АЛС с привязкой их к цифровой модели пути, отличающееся тем, что оно снабжено модулем фиксатора уровня сигнала, первый вход которого соединен с выходом аналого-цифрового преобразователя, а второй вход соединен с выходом модуля бортовой электронной карты, выход модуля фиксатора уровня сигнала соединен с входом модуля памяти, выход которого подключен к первому входу модуля сравнения, второй вход которого соединен с выходом модуля памяти контрольных сигналов, выход модуля сравнения соединен со вторым входом процессора, третий вход/выход которого соединен с входом/выходом блока анализа данных, вход/выход которого соединен с входом/выходом блока принятия решения, первый и второй выходы которого соединены соответственно с третьим и четвертым входами процессора.
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРИФТОРИДА XJOPABf№-»poi; | 0 |
|
SU190653A1 |
| Стеллажи противовесные подъемно-опускные | 1959 |
|
SU128588A1 |
| УСТРОЙСТВО КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВЫХ ЦЕПЕЙ | 2011 |
|
RU2457134C1 |
| CN 110949456 A, 03.04.2020. | |||

