Изобретение относится к системам управления движением и обеспечения безопасности движения тягового подвижного состава.
Известна система управления движением поездов, содержащая установленные на локомотиве блок автоматической локомотивной сигнализации, датчик пути и скорости, скоростемер, блок индикации, блок сравнения, блок управления тормозами, тягой и контроллером управления тяговыми электродвигателями, а на пути - блоки кодирования непрерывной АЛС, связанные с блоком электрической централизации (Ю.А. Кравцов и др. «Система железнодорожной автоматики и телемеханики», М., Транспорт, 1996, рис 5.10, 5.13 и 5.14). В известной системе используется автоматическая локомотивная сигнализация непрерывного типа совместно с системой автоматического управления тормозами.
Известная система имеет ограниченные функциональные возможности в отношении маневровых передвижений. В частности, при движении состава вагонами вперед система не позволяет рассчитывать допустимую скорость движения для автоматической остановки состава перед светофором с запрещающим сигнальным показанием.
Наиболее близкой по совокупности существенных признаков является принятая в качестве прототипа система управления движением поездов, содержащая в бортовом устройстве управления локомотива подсистему автоматического управления служебным торможением и подсистему контроля безопасности движения, устройство выявления неисправностей, интерактивное устройство интеллектуального контроля бодрствования машиниста, включающее узел физиологического контроля и узел регистрации управляющих действий машиниста по ведению поезда и два интерактивных устройства визуализации информации по одному в каждой кабине машиниста, каждое из которых содержит цветной графический дисплей и устройство отображения и ручного ввода информации, общесистемный высокоскоростной CAN-интерфейс, объединяющий все подсистемы, устройства и блоки бортовой системы управления и обеспечивающий обмен между ними цифровой информацией и передачу управляющих команд, устройство регистрации в реальном времени всей цифровой информации, циркулирующей в CAN-интерфейсе на энергонезависимый носитель, систему датчиков пути и скорости движения, приемное устройство непрерывного и точечного индуктивных каналов связи, устройство спутниковой навигационной системы и электронной карты маршрутов, систему датчиков давления в основных агрегатах пневматической тормозной системы локомотива и приемопередатчик цифрового канала радиосвязи, соединенный через цифровой канал радиосвязи с блоком электрической централизации, входы /выходы которого соединены с путевыми устройствами рельсовых цепей и автоматической локомотивной сигнализации непрерывного типа изолированных путевых участков и соответствующих им путевых и маневровых светофоров (RU 2355596, B61L 3/00, B61L 27/00, 20.05.09).
Это техническое решение обеспечивает повышение эффективности и уровня безопасности железнодорожных перевозок. Однако не позволяет надежно осуществлять необходимые маневры в полностью автоматическом режиме при сбоях в передаче данных по цифровому каналу радиосвязи.
Технический результат изобретения заключается в создании системы управления движением поездов, позволяющей надежно осуществлять необходимые маневры в полностью автоматическом режиме даже при сбоях в передаче данных по цифровому каналу радиосвязи и, тем самым, повысить надежность и безопасность движения.
Технический результат достигается тем, что в систему управления движением поездов, содержащую в бортовом устройстве управления каждого локомотива общесистемный высокоскоростной CAN-интерфейс, к которому подключены подсистема автоматического управления служебным торможением, подсистема контроля безопасности движения, устройство выявления неисправностей, интерактивное устройство интеллектуального контроля бодрствования машиниста, интерактивные устройства визуализации информации, каждое из которых содержит цветной графический дисплей и блок отображения и ручного ввода информации, устройство регистрации в реальном времени цифровой информации CAN-интерфейса на энергонезависимый носитель, систему датчиков пути и скорости движения, устройство спутниковой навигационной системы и электронной карты маршрутов, систему датчиков давления в основных агрегатах пневматической тормозной системы локомотива и приемопередатчик цифрового канала радиосвязи, а на пути, разделенном на изолированные путевые участки, путевой блок электрической централизации, входы/выходы которого соединены с путевыми устройствами рельсовых цепей и автоматической локомотивной сигнализации непрерывного типа изолированных путевых участков и соответствующих им путевых и маневровых светофоров, согласно изобретению введены в бортовое устройство управления каждого локомотива приемное устройство непрерывного и точечного индуктивных каналов связи, выход которого подключен к общесистемному высокоскоростному CAN-интерфейсу, а на каждом изолированном путевом участке шлейф точечного канала индуктивной связи и путевой формирователь кодовых сигналов, выход блока электрической централизации через локальную двухпроводную сеть цифровой передачи данных подключен к входам управления путевых формирователей кодовых сигналов, выходы которых подключены соответственно к шлейфам точечного канала индуктивной связи.
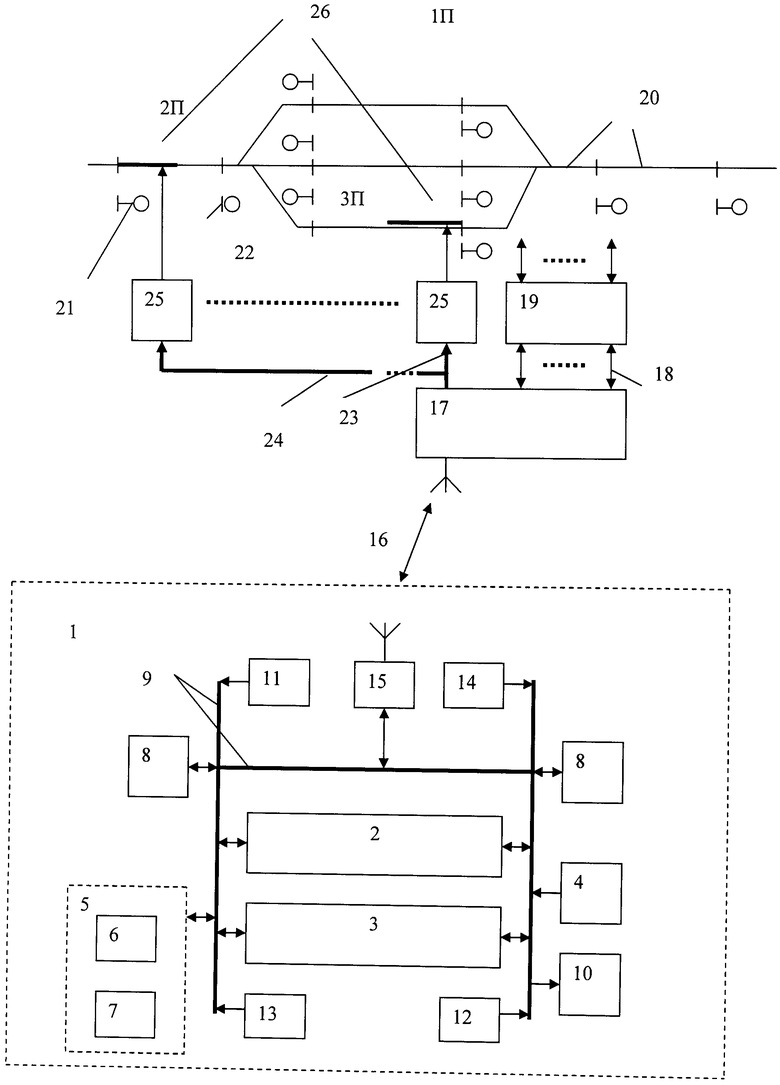
На чертеже приведена функциональная схема системы управления движением поездов.
Система управления движением поездов содержит в бортовом устройстве 1 управления каждого локомотива подсистему 2 автоматического управления служебным торможением, в качестве которой может быть использована, например, система САУТ-ЦМ, подсистему 3 контроля безопасности движения, в качестве которой может быть использовано, например, локомотивное устройство КЛУБ-У, устройство 4 выявления неисправностей, интерактивное устройство 5 интеллектуального контроля бодрствования машиниста, включающее узел 6 физиологического контроля, в качестве которого может быть использована, например, телемеханическая система контроля бодрствования машиниста (ТСКБМ), и узел 7 регистрации управляющих действий машиниста по ведению поезда, два интерактивных устройства 8 визуализации информации, по одному в каждой кабине машиниста, каждое из которых содержит цветной графический дисплей и устройство отображения и ручного ввода информации (на чертеже не показано); общесистемный высокоскоростной CAN-интерфейс 9 (например, CAN-250), объединяющий все подсистемы, устройства и блоки бортовой системы управления и обеспечивающий обмен между ними цифровой информацией и передачу управляющих команд; устройство 10 регистрации на энергонезависимый носитель в реальном времени всей цифровой информации, циркулирующей в CAN-интерфейсе 9 (в качестве устройства регистрации 10 может быть использован, например, регистратор параметров движения поезда РПДА), систему 11 датчиков пути и скорости движения, приемное устройство 12 непрерывного и точечного индуктивных каналов связи устройство 13 спутниковой навигационной системы и электронной карты маршрутов, систему 14 датчиков давления в основных агрегатах пневматической тормозной системы локомотива, приемопередатчик 15 цифрового канала радиосвязи, соединенный через цифровой канал 16 радиосвязи с блоком 17 электрической централизации, входы/выходы 18 которого соединены, с путевыми устройствами 19 рельсовых цепей и автоматической локомотивной сигнализации непрерывного типа изолированных путевых участков 20 и соответствующих им путевых 21 и маневровых 22 светофоров (соединения типовые и на чертеже не показаны). Выход 23 блока 17 электрической централизации через локальную двухпроводную сеть 24 цифровой передачи данных связан с входами управления путевых формирователей 25 кодовых сигналов точечного канала индуктивной связи, выходы которых через соответствующие шлейфы 26 точечного канала индуктивной связи соединены с приемными устройствами 12 непрерывного и точечного индуктивных каналов связи бортовых устройств 1 управления перемещающихся над ними локомотивов. Позициями 1П, 2П, 3П обозначены пути в горловине станции.
Система управления движением поездов работает следующим образом. При нахождении вагонов позади локомотива через приемное устройство 12 непрерывного и точечного индуктивных каналов связи на бортовое устройство 1 управления перемещающегося над ним локомотива поступает из шлейфов 26 точечного канала индуктивной связи информация для работы подсистемы 2 автоматического управления служебным торможением, а по непрерывному каналу индуктивной связи из рельсовых цепей изолированных путевых участков 20, расположенных по ходу движения поезда, поступает информация об их свободности и исправности для работы подсистемы 3 контроля безопасности движения. Через цифровой канал 16 радиосвязи передается дополнительная информация от блока 17 электрической централизации о временных ограничениях скорости или экстренных приказах диспетчера из его автоматизированного рабочего места. Все три канала передачи информации с пути на бортовое устройство 1 управления перемещающегося над ним локомотива дополняют и резервируют друг друга, обеспечивая высокий уровень надежности и безопасности движения поезда в автоматическом режиме.
В процессе движения поезда в общесистемный CAN-интерфейс 9 непрерывно поступают данные от системы 11 датчиков пути и скорости движения. При поступлении этих данных в подсистемах автоматического управления служебным торможением 2 и контроля безопасности движения 3 вычисляются фактическая скорость движения, а также путь, пройденный с момента начала движения. На основании этих вычислений производится координатная привязка к заложенной в памяти устройства 13 электронной карте выбранного маршрута и определяется текущая координата нахождения поезда. В систему также непрерывно поступают данные от датчиков 14 давления в основных агрегатах пневматической тормозной системы локомотива и приемного устройства 12 непрерывного и точечного индуктивных каналов связи, на основании которых системой выбираются режимы управления поездом. Каждая из подсистем 2 и 3 производит анализ входящей информации, обработку ее в соответствии с заложенными алгоритмами и выработку управляющих воздействий на тормозные устройства локомотива и его тяговое оборудование. Алгоритмы работы подсистем согласованы таким образом, что исключена одновременная передача управляющих команд от различных подсистем. Например, при необходимости снижения скорости служебным торможением при достижении предельно допустимого значения скорости управление служебным торможением осуществляется подсистемой 2 автоматического управления служебным торможением, а при недостаточной эффективности служебного торможения процесс управления торможением перехватывается подсистемой 3 контроля безопасности движения, в результате управляющего воздействия которой инициируется экстренное торможение поезда. Информация, необходимая для ведения поезда, отображается машинисту посредством интерактивного устройства 8 визуализации информации. В процессе работы системы автоматически осуществляется выявление опасных неисправностей тягового, тормозного и вспомогательного оборудования локомотива, железнодорожного пути и устройств интервального регулирования, которые могут привести к нарушениям безопасности движения. Устройство 4 выявления неисправностей информирует машиниста выдачей сообщений на графический дисплей о возникновении неисправностей или режимов работы оборудования, угрожающих безопасности движения поезда, на основании чего машинист принимает меры по предотвращению негативных последствий. Устройство 5 интеллектуального контроля бодрствования машиниста обеспечивает физиологический контроль бодрствования машиниста с помощью узла 6 физиологического контроля, контролирующего уровень кожно-гальванической реакции машиниста, а также с помощью узла 7 регистрации управляющих действий машиниста, к которым, например, относятся управление рукояткой контроллера, краном машиниста, подачей песка, звукового сигнала. В случае снижения уровня бодрствования устройство инициирует служебное торможение.
При нахождении вагонов перед локомотивом информация на бортовое устройство 1 управления локомотива по непрерывному каналу индуктивной связи не поступает. Такой режим движения может быть, например, при соединении составов электропоездов для перемещения состава с неисправным локомотивом на соседнюю станцию или на другой путь данной станции с помощью другого исправного состава, или маневрового локомотива. Бортовая аппаратура управления неисправного поезда может находиться в отключенном состоянии, а сигналы из рельсовых цепей не доходить до приемного устройства 12 непрерывного и точечного индуктивных каналов связи рабочего локомотива из-за шунтирования.
В предлагаемой системе за счет связи путевых формирователей 25 кодовых сигналов точечного канала индуктивной связи с блоком 17 электрической централизации по локальной двухпроводной сети 24 цифровой передачи данных обеспечивается полный объем информации, необходимой для надежного и безопасного управления движением состава, в том числе и при сбоях в работе цифрового канала 16 радиосвязи. Информация, передаваемая по цифровому каналу 16 радиосвязи, обеспечивает резервирование и повышение оперативности управления.
Рассмотрим пример работы системы в маневровом перемещении состава неисправного электропоезда другим, исправным электропоездом, в нечетной горловине станции с пути 3П на путь 1П. Полурейс вытягивания производится локомотивом основного поезда, расположенным в голове состава, на бесстрелочный участок, ограниченный светофором 21 по лунно-белому огню путевого светофора пути 3П за маневровый светофор 22. Затем производится полурейс осаживания неисправного состава электропоезда на путь 1П по разрешающему огню маневрового светофора 22. При этом подталкивающий локомотив находится сзади состава, который при осаживании движется вагонами вперед.
После приготовления дежурным поста блока 17 электрической централизации маршрута полурейса вытягивания объединенного состава, замыкания маршрута и открытия светофора в нечетной горловине станции с пути 3П в соответствующий путевой формирователь 25 кодовых сигналов точечного канала индуктивной связи пути ЗП по локальной двухпроводной сети 24 цифровой передачи данных поступает кодированная информация (приказ). Приказ содержит информацию об уникальном адресе для сети 24 цифровой передачи данных данного путевого формирователя 25 кодовых сигналов точечного канала индуктивной связи, уникальном номере локомотива, которому адресован приказ, номере и длине приготовленного маршрута, временных ограничениях скорости, действующих в соответствии с ТРА на данной станции, данные о длине, массе и тормозных характеристиках объединенного состава, рассчитанные автоматизированным рабочим местом дежурного по станции на основании локальной базы данных о количестве свободных изолированных участков пути из блоков 17 электрической централизации и расстоянии до первого светофора с запрещающим сигнальным показанием по плану станции. Одновременно эти же данные передаются с блока 17 электрической централизации на локомотив, по цифровому каналу 16 радиосвязи с целью дублирования и резервирования.
Путевой формирователь 25 кодовых сигналов точечного канала индуктивной связи добавляет к телеграмме постоянные данные из своей памяти: координату его расположения на пути, данные о длине, плане и профиле своего участка пути и вырабатывает результирующий кодовый сигнал, который воспринимается на локомотиве во время прохождения над шлейфом 26 точечного канала индуктивной связи приемного устройства 12 непрерывного и точечного индуктивных каналов связи локомотива исправного электропоезда.
Бортовое устройство 1 локомотива исправного электропоезда в маршруте вытягивания также получает кодовые сигналы АЛС из рельсовых цепей. Информация, принимаемая на локомотиве, содержит все данные для эффективного расчета программной скорости подсистемой 2 автоматического управления служебным торможением локомотива, которая производит расчет программной скорости движения с учетом гарантированной остановки состава перед светофором с запрещающим сигнальным показанием. В расчете программной скорости учитываются данные о параметрах пути по маршруту движения, которые поступают из электронной карты устройства 13 спутниковой навигационной системы и электронной карты маршрутов, и учитывается текущая координата локомотива, которая определяется непрерывно по данным от системы 11 датчиков пути и скорости и приемнику устройства 13 спутниковой навигационной системы и электронной карты маршрутов. Данные сообщаются машинисту во время движения через интерактивное устройство 8 визуализации и ручного ввода информации для обеспечения сравнения с данными, поступающими от руководителей маневров по голосовой радиосвязи. Если данные не противоречивы, то они обеспечивают полностью автоматический режим ведения поезда. Если данные не полные или противоречивы, то они корректируются и дополняются данными, вводимыми машинистом через устройство 8 визуализации и ручного ввода информации. При поступлении данных только по одному из каналов передачи цифровой информации, они обязательно проверяются посредством переговоров по голосовой радиосвязи между машинистом и руководителями маневров. После завершения полурейса вытягивания диспетчер приготавливает маршрут для полурейса осаживания.
Полурейс осаживания выполняется вагонами вперед, поэтому бортовые устройства 1 управления локомотива исправного электропоезда в маршруте осаживания не получают кодовые сигналы АЛС из рельсовых цепей. Вся необходимая информация для расчета режимов служебного и экстренного торможения поступает на бортовое устройство 1 управления локомотива во время прохождения его приемного устройства 12 непрерывного и точечного индуктивных каналов связи над шлейфом 26 точечного канала индуктивной связи, расположенного за светофором 21.
Предлагаемая система управления движением поездов позволяет осуществлять необходимые маневры в полностью автоматическом режиме, в том числе при сбоях в передаче данных цифровому каналу 16 радиосвязи, что повышает надежность и безопасность движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ | 2012 |
|
RU2519317C1 |
| Бортовая информационная система | 2020 |
|
RU2742960C1 |
| СИСТЕМА УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ТЯГОВОГО ПОДВИЖНОГО СОСТАВА | 2010 |
|
RU2429152C1 |
| БЕЗОПАСНЫЙ ЛОКОМОТИВНЫЙ ОБЪЕДИНЕННЫЙ КОМПЛЕКС | 2011 |
|
RU2475396C1 |
| СПОСОБ УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ТЯГОВОГО ПОДВИЖНОГО СОСТАВА И ЕДИНАЯ КОМПЛЕКСНАЯ СИСТЕМА (ЕКС) ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2355596C1 |
| Система управления движением поездов по перегону | 2022 |
|
RU2783558C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДА | 2010 |
|
RU2446069C1 |
| БЕЗОПАСНЫЙ ЛОКОМОТИВНЫЙ ОБЪЕДИНЕННЫЙ КОМПЛЕКС | 2011 |
|
RU2474507C2 |
| Способ интервального регулирования движения поездов с использованием подвижных координатных отрезков на участках без путевых светофоров | 2024 |
|
RU2828493C1 |
| Система интервального регулирования движения поездов на основе спутниковых навигационных средств и цифрового радиоканала с координатным методом контроля | 2016 |
|
RU2618659C1 |
Изобретение относится к системам управления движением поездов. Система управления движением поездов содержит в бортовом устройстве управления каждого локомотива CAN-интерфейс, подсистему автоматического управления служебным торможением, подсистему контроля безопасности движения, устройство выявления неисправностей, устройство контроля бодрствования машиниста, интерактивные устройства визуализации информации. Также имеется система датчиков пути и скорости движения, устройство спутниковой навигационной системы и электронной карты маршрутов, система датчиков давления в пневматической тормозной системе локомотива и приемопередатчик канала радиосвязи. Дополнительно введено в бортовое устройство управления приемное устройство непрерывного и точечного индуктивных каналов связи, подключенное к CAN-интерфейсу. На каждом путевом участке введен шлейф точечного канала индуктивной связи и путевой формирователь кодовых сигналов. Блок электрической централизации через сеть передачи данных подключен к входам путевых формирователей кодовых сигналов, выходы которых подключены к шлейфам точечного канала связи. Решение направлено на повышение надежности и безопасности движения. 1 ил.
Система управления движением поездов, содержащая в бортовом устройстве управления каждого локомотива общесистемный высокоскоростной CAN-интерфейс, к которому подключены подсистема автоматического управления служебным торможением, подсистема контроля безопасности движения, устройство выявления неисправностей, интерактивное устройство интеллектуального контроля бодрствования машиниста, интерактивные устройства визуализации информации, каждое из которых содержит цветной графический дисплей и блок отображения и ручного ввода информации, устройство регистрации в реальном времени цифровой информации CAN-интерфейса на энергонезависимый носитель, систему датчиков пути и скорости движения, устройство спутниковой навигационной системы и электронной карты маршрутов, систему датчиков давления в основных агрегатах пневматической тормозной системы локомотива и приемопередатчик цифрового канала радиосвязи, а на пути, разделенном на изолированные путевые участки, путевой блок электрической централизации, входы/выходы которого соединены с путевыми устройствами рельсовых цепей и автоматической локомотивной сигнализации непрерывного типа изолированных путевых участков и соответствующих им путевых и маневровых светофоров, отличающаяся тем, что в нее введены в бортовое устройство управления каждого локомотива приемное устройство непрерывного и точечного индуктивных каналов связи, выход которого подключен к общесистемному высокоскоростному CAN-интерфейсу, а на каждом изолированном путевом участке шлейф точечного канала индуктивной связи и путевой формирователь кодовых сигналов, выход блока электрической централизации через локальную двухпроводную сеть цифровой передачи данных подключен к входам управления путевых формирователей кодовых сигналов, выходы которых подключены соответственно к шлейфам точечного канала индуктивной связи.
| СПОСОБ УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ТЯГОВОГО ПОДВИЖНОГО СОСТАВА И ЕДИНАЯ КОМПЛЕКСНАЯ СИСТЕМА (ЕКС) ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2355596C1 |
| СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ ПРИ ДИСПЕТЧЕРСКОЙ ЦЕНТРАЛИЗАЦИИ | 2008 |
|
RU2387564C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ | 2008 |
|
RU2388637C1 |
| US 2006212183 A1, 21.09.2006. | |||

