Изобретение относится к магнитометрии, а именно к методам компонентных измерений геомагнитного поля вблизи ферромагнитных масс, и предназначено для определения компонент геомагнитного поля.
Известен способ определения компонент вектора магнитной индукции (ВМИ) [1] при котором определяют поправки на девиацию, а затем эти поправки используют для коррекции результатов измерений компонент ВМИ геомагнитного поля на носителе. Однако определение этих поправок с достаточной степенью точности возможно только при относительно низком уровне собственного магнитного поля носителя (СПН).
Известен также способ определения компонент ВМИ, включающий линейное преобразование измеряемого поля по трем взаимно перпендикулярным направлениям с заданными коэффициентами преобразования, из которых хотя бы один не равен двум другим [2] Этот способ включает также ориентацию преобразователя до совмещения одного из направлений преобразования с направлением определяемой компоненты вектора магнитной индукции, а другого направления преобразования с плоскостью, в которой находятся первое направление преобразования и вектор магнитной индукции, определение величин модулей векторов магнитной индукции преобразованного и непреобразованного полей с последующим определением компонент вектора магнитной индукции.
Недостатком этого способа является необходимость отсутствия градиента магнитного поля в точках установки преобразователей. Если же в точке преобразования присутствует еще дополнительное поле, а таким полем может быть СПН, то результаты компонентных измерений искажаются.
С целью повышения точности при определении компонент вектора магнитной индукции способом, включающим линейное преобразование измеряемого поля по трем взаимно перпендикулярным направлениям с заданными коэффициентами преобразования, из которых хотя бы один не равен двум другим, ориентацию преобразователя до совмещения одного из направлений преобразования с направлением определяемой компоненты вектора магнитной индукции, а другого направления преобразования с плоскостью, в которой находятся первое направление преобразования и вектор магнитной индукции, определение величин модулей векторов магнитной индукции преобразованного и измеряемого полей с последующим определением компонент вектора магнитной индукции, перед ориентацией преобразователя определяют направление вектора магнитной индукции суммарного магнитного поля, создают дополнительное магнитное поле, противоположное этому направлению, и изменяют его величину до выполнения условия
Т2' TP1,
где Т2' модуль вектора магнитной индукции преобразованного суммарного поля;
Т модуль вектора магнитной индукции геомагнитного поля;
Р1 коэффициент преобразования, по величине не равный двум другим.
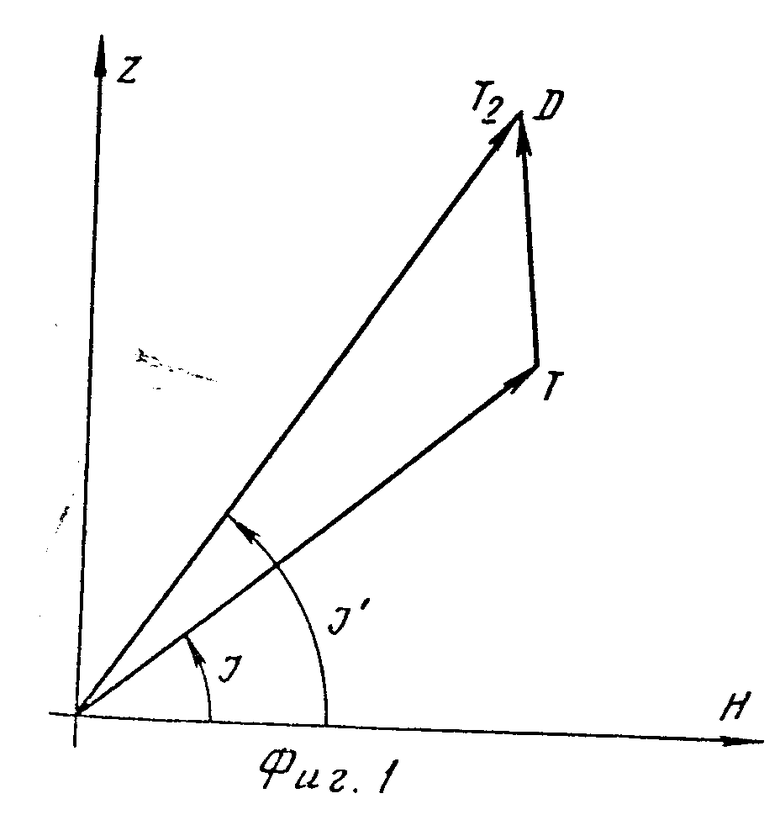
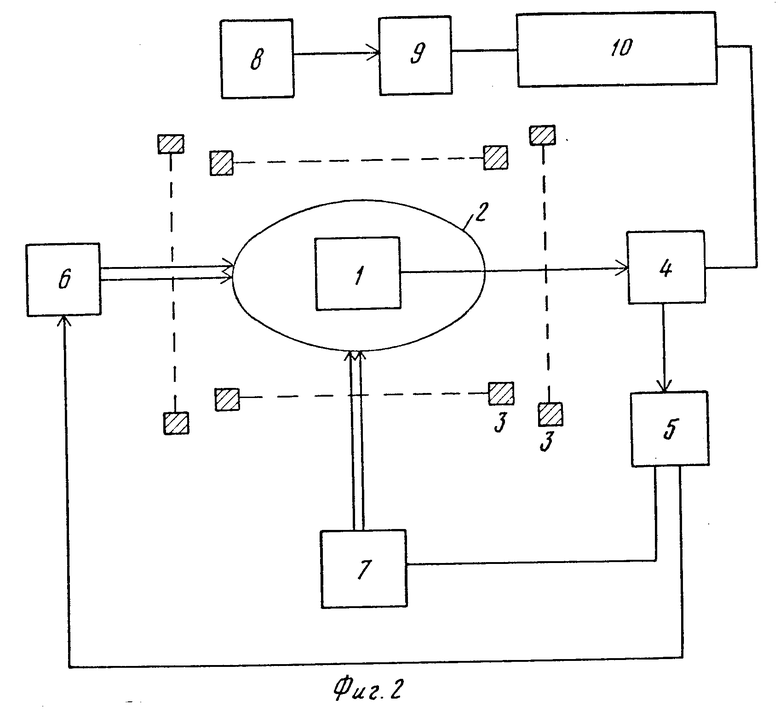
На фиг. 1 дан пример формирования суммарного магнитного поля в точке установки линейного преобразователя на носителе; на фиг. 2 пример устройства, реализующего данный способ.
Устройство содержит модульный преобразователь 1, измеряющий преобразованное магнитное поле, линейный преобразователь 2 поля, электромагнитную систему 3, изменяющую суммарное магнитное поле, измерительный блок 4, индикатор 5 положения линейного преобразователя 2 поля, систему 6 ориентации в вертикальной плоскости, систему 7 ориентации в горизонтальной плоскости, модульный преобразователь 8, измеряющий магнитное поле вне пределов собственного магнитного поля носителя, измерительный блок 9 и вычислитель 10.
Выход модульного преобразователя 1 через измерительный блок 9 подключен к первому входу вычислителя 10. К второму входу вычислителя подсоединен первый выход измерительного блока 4, к второму выходу этого блока подключен индикатор 5, а к входу модульный преобразователь 1. Выходы индикатора 5 подключены к входам систем 6 и 7, соединенных с линейным преобразователем 2 поля.
На фиг. 1 показана векторная диаграмма, поясняющая сущность способа определения компонент ВМИ, где  ВМИ геомагнитного поля,
ВМИ геомагнитного поля,  ВМИ поля носителя,
ВМИ поля носителя,  ВМИ суммарного поля, J угол между горизонтальной плоскостью и ВМИ.
ВМИ суммарного поля, J угол между горизонтальной плоскостью и ВМИ.
Способ осуществляется следующим образом. С помощью буксируемого прибора за пределы распространения СПН выносится второй модульный преобразователь 8. С его помощью измерительным блоком 9 измеряют модуль ВМИ геомагнитного поля  На борту носителя устанавливается линейный преобразователь 2 поля. Предположим, что в качестве линейного преобразователя используется сфероидальная оболочка. Внутри этой оболочки устанавливается модульный преобразователь 1, измеряющий с помощью измерительного блока 4 линейно преобразованное поле.
На борту носителя устанавливается линейный преобразователь 2 поля. Предположим, что в качестве линейного преобразователя используется сфероидальная оболочка. Внутри этой оболочки устанавливается модульный преобразователь 1, измеряющий с помощью измерительного блока 4 линейно преобразованное поле.
Вначале с помощью систем 6 и 7 ориентации в горизонтальной и вертикальной плоскостях ориентируют сфероидальную оболочку таким образом, чтобы полуось, не равная двум другим, совпала с направлением суммарного магнитного поля  Это положение находится с помощью индикатора 5 по максимальному (минимальному) значению преобразованного поля. После ориентации первый измерительный блок 4 измеряет величину суммарного поля. С помощью электромагнитной системы 3, изменяющей суммарное магнитное поле, добиваются выполнения соотношения T2' TP1. Здесь могут быть использованы колечные системы Гельмгольца, Фанзелау и т.п.
Это положение находится с помощью индикатора 5 по максимальному (минимальному) значению преобразованного поля. После ориентации первый измерительный блок 4 измеряет величину суммарного поля. С помощью электромагнитной системы 3, изменяющей суммарное магнитное поле, добиваются выполнения соотношения T2' TP1. Здесь могут быть использованы колечные системы Гельмгольца, Фанзелау и т.п.
Затем совмещают полуось сфероида, не равную двум другим, с вертикалью (полагаем, что необходимо измерить вертикальную и горизонтальную компоненты геомагнитного поля). В силу симметрии сфероидальной оболочки ориентации в горизонтальной плоскости не требуется.
Одновременно модульными преобразователями 1 и 8 определяют модуль ВМИ преобразованного поля и модуль геомагнитного поля. По соответствующему алгоритму определяют значения вертикальной и горизонтальной компонент геомагнитного поля.
Данный способ достаточно просто позволяет компенсировать составляющую СПН, вносящую максимальную погрешность в компонентные измерения. Кроме того, эта составляющая сравнительно просто определяется как в начале измерений, так и в процессе их проведения. Техническое решение задачи значительно упрощается вследствие отсутствия необходимости создавать буксируемый компонентный прибор. ЫЫЫ2
Способ определения компонент вектора магнитной индукции, включающий линейное преобразование измеряемого соля по трем взаимно перпендикулярным направлениям с заданными коэффициентами преобразования, из которых хотя бы один по величине не равен двум другим, ориентацию преобразователя до совмещения одного из направлений преобразования с направлением определяемой компоненты вектора магнитной индукции, а другого направления преобразования - с плоскостью, в которой находятся первое направление преобразования и вектор магнитной индукции, определение величин модулей векторов магнитной индукции преобразованного и измеряемого полей с последующим определением компонент вектора магнитной индукции, отличающийся тем, что, с целью повышены точности, перед ориентацией преобразователя определяют направление вектора магнитной индукции суммарного магнитного поля, создают дополнительно магнитное поле, противоположное этому направлению, и изменяют его величину до выполнения условия
где  - модуль вектора магнитной индукции преобразованного суммарного поля;
- модуль вектора магнитной индукции преобразованного суммарного поля;
Т - модуль вектора магнитной индукции геомагнитного поля;
P1 - коэффициент преобразования, равный двум другим.
Способ определения компонент вектора магнитной индукции, включающий линейное преобразование измеряемого поля по трем взаимно перпендикулярным направлениям с заданными коэффициентами преобразования, из которых хотя бы один по величине не равен двум другим, ориентацию преобразователя до совмещения одного из направлений преобразования с направлением определяемой компоненты вектора магнитной индукции, а другого направления преобразования
с плоскостью, в которой находятся первое направление преобразования и вектор магнитной индукции, определение величин модулей векторов магнитной индукции преобразованного и измеряемого полей с последующим определением компонент вектора магнитной индукции, отличающийся тем, что, с целью повышения точности, перед ориентацией преобразователя определяют направление вектора магнитной индукции суммарного магнитного поля, создают дополнительно магнитное поле, противоположное этому направлению, и изменяют его величину до выполнения условия
где  модуль вектора магнитной индукции преобразованного суммарного поля;
модуль вектора магнитной индукции преобразованного суммарного поля;
Т модуль вектора магнитной индукции геомагнитного поля;
P1 коэффициент преобразования, равный двум другим.
| Иванов М.М | |||
| Магнитная съемка океанов, "Геомагнетизм", N 7, 1966, с | |||
| Способ подготовки рафинадного сахара к высушиванию | 0 |
|
SU73A1 |
