Изобретение относится к области эксплуатации подъемно-транспортного оборудования, а именно к монтажу устройств на основе подвесных канатных систем для оперативного мобильного развертывания транспортно-перегрузочных грузовых и пассажирских канатных дорог в условиях необорудованной и труднодоступной местности, при необходимости создания временных или сезонных переправочных сооружений, ликвидации природных или техногенных чрезвычайных ситуаций.
Известен и в настоящее время широко применяется способ навешивания канатов на опоры (концевые и промежуточные) одно- и многопролетных подвесных канатных дорог [ВСН 265-84 Инструкция по монтажу грузовых и пассажирских подвесных канатных дорог. М.: Минмонтажспецстрой СССР, 1985. 60 с.] путем раскатки отрезков навешиваемого каната вдоль трассы канатной дороги с последующим соединением их смежных концов с образованием замкнутого кольцевого контура, поднятием на рабочую высоту и размещением в профилированных ручьях канатных шкивов концевых опор и в профилированных ручьях поддерживающих роликов промежуточных опор, причем в горных условиях для раскатки навешиваемого каната используется дополнительный монтажный канат малого диаметра, предназначенный для протягивания основного каната вдоль трассы.
Недостатком указанного способа навешивания каната подвесной канатной дороги является необходимость использования земной поверхности на всем протяжении трассы канатной дороги, что требует ее предварительной подготовки для размещения опорного оборудования и проезда используемой техники (тракторов, автомобилей), включая проведение комплекса необходимых земляных, очистных и дорожных работ. Это требует значительных временных и материальных затрат, а также разнородного оборудования и такелажной оснастки. При наличии на трассе канатной дороги природных препятствий в виде ущелий, глубоких оврагов, рек и подобных образований применение данного способа резко усложняется, так как в этом случае необходимо предварительно установить и закрепить специальные поддерживающие устройства, например, натянуть предохранительные сети между предварительно временно установленными и заякоренными опорами, ограничивающими труднодоступный участок трассы.
Известен способ раскатки несущего каната однопролетной подвесной канатной дороги [А.с. SU № 351739, B61B 7/00, опубл. 21.09.1972] с помощью монтажного каната, который одним концом с помощью муфты соединен с концом навешиваемого каната, причем для обеспечения беспрепятственного прохождения цепной линией каната над сложным рельефом местности монтируемого участка раскатка навешиваемого несущего каната производится под расчетным монтажным натяжением, создаваемым тормозным устройством катушки с несущим канатом.
Недостатком указанного способа является нерешенность вопроса о том, каким образом свободный конец монтажного каната, который в дальнейшем навивается на барабан монтажной лебедки, доставляется к противоположной концевой опоре канатной дороги в случае наличия на местности монтируемого участка труднопреодолимых природных препятствий (горные ущелья, глубокие овраги, реки и др.). Согласно исследованиям, приведенным в [Лагерев А.В., Лагерев И.А., Таричко В.И. Надежность и безопасность эксплуатации мобильных транспортно-перегрузочных канатных комплексов. Брянск: РИСО БГУ, 2022. 207 с.], однопролетные мобильные канатные дороги могут проектироваться на величину пролета до 500…750 м (по горизонтали) при угле наклона трассы до 60°. При минимально допустимом диаметре монтажного каната 10…15 мм его собственный вес, который необходимо переправить к противоположной концевой опоре канатной дороги, будет составлять 350…850 кг (применительно к стальным канатам типа ТЛК-О ГОСТ 3079-80), что требует обязательного использования транспортных средств механизации. Для данного способа это усугубляется тем, что необходимо использовать монтажный канат с повышенным значением разрывного усилия, т.е. канат повышенного диаметра, так как он испытывает нагружение не только от собственного веса, но и расчетного монтажного натяжения, что утяжеляет монтажный канат. Также не решен вопрос о возвращении конца навешиваемого каната обратно к начальной концевой опоре, чтобы создать замкнутый кольцевой контур подвесной канатной системы канатной дороги, так как вторая монтажная лебедка в конструкции рассматриваемого технического устройства не предусмотрена.
Известен способ монтажа проводов воздушной линии электропередачи [А.с. SU № 943948, H02G 1/04, опубл. 15.07.1982], который предусматривает использование вертолета для доставки к конечной опоре линии электропередачи вспомогательного монтажного каната (тягового троса), один конец которого закреплен на внешнем устройстве вертолета, а второй соединен с навешиваемым проводом, с последующим протягиванием навешиваемого провода путем наматывания на барабан монтажной лебедки монтажного каната (тягового троса), предварительно отцепленного от вертолета и сброшенного с высоты на землю.
Указанный способ, хотя и позволяет преодолеть вышеотмеченный недостаток, связанный с требованием доставки к противоположной концевой опоре канатной дороги достаточно тяжеловесного монтажного каната, тем не менее, он также не позволяет обеспечить возврат конца навешиваемого каната обратно к начальной концевой опоре, чтобы создать замкнутый кольцевой контур подвесной канатной системы канатной дороги. Как недостаток следует отметить и то, что использование вертолета требует обязательного наличия обустроенной вертолетной площадки непосредственно рядом с одной из концевых опор канатной дороги для выполнения технологических операций по закреплению конца монтажного каната во внешнем устройстве вертолета, что либо требует проведения дополнительных земляных и строительных работ, либо оказывается невозможным (например, в горных условиях или лесистой местности).
Наиболее близким по своей технической сущности к предлагаемому изобретению, принятому за его прототип, является способ навешивания каната или троса между расположенными на большом расстоянии друг от друга опорами, такими как подвесные кабельные опоры или опоры канатной дороги [заявка DE № 3429196A1, H02G 1/04, опубл. 13.02.1986]. Способ предусматривает использование вертолета и монтажного каната с закрепленным на нем по крайней мере одним грузом для придания монтажному канату вертикального положения в процессе протягивания навешиваемого каната, причем один конец монтажного каната крепится к внешнему устройству вертолета, а второй - к одному из концов навешиваемого каната.
Рассмотренный прототип имеет ряд существенных конструктивных и функциональных недостатков. Необходимо использовать монтажный канат с высоким значением разрывного усилия, т.е. канат достаточно большого диаметра, так как он испытывает нагружение не только от своего собственного веса и собственного веса навешиваемого каната, но и от дополнительно подвешенных к нему одного или нескольких грузов. При этом надо учитывать, что монтажный канат должен воспринимать полный вес навешиваемого каната в пределах всей длины пролета с учетом его естественного провисания. При указанной выше длине пролета однопролетной мобильной канатной дороги до 500…750 м с углом наклона трассы до 60° и диаметром 35…40 мм [Лагерев А.В., Лагерев И.А., Таричко В.И. Надежность и безопасность эксплуатации мобильных транспортно-перегрузочных канатных комплексов. Брянск: РИСО БГУ, 2022. 207 с.], полный вес навешиваемого каната будет составлять порядка 7300…9100 кг. Таким образом, чтобы обеспечить навешивание каната в таких условиях можно использовать лишь ограниченный тип наиболее грузоподъемных современных вертолетов: Ми-6 и Ми-10К (полезная нагрузка на внешней подвеске до 8000 кг), Ми-26 (20000 кг) и Ми-26К (25000 кг). Очевидно, использование таких уникальных летательных аппаратов для навешивания каната мобильной канатной дороги является технически и экономически нецелесообразным мероприятием.
Также анализ аналога и прототипа предлагаемого изобретения показывает, что наряду с индивидуальными специфическими недостатками, отмеченными выше, они имеют общие функциональные недостатки: 1) не позволяют обеспечить возврат конца навешиваемого каната обратно к начальной концевой опоре, чтобы создать замкнутый кольцевой контур подвесной канатной системы канатной дороги; 2) использование вертолета требует обязательного наличия обустроенной вертолетной площадки непосредственно рядом с одной из концевых опор канатной дороги для выполнения технологических операций по закреплению конца монтажного каната во внешнем устройстве вертолета, что либо требует проведения дополнительных земляных и строительных работ, либо оказывается невозможным (например, в горных условиях или лесистой местности).
Техническими задачами, на решение которых направлено предлагаемое изобретение, являются:
1) существенное снижение финансовых и материальных затрат, сокращение числа эксплуатационного персонала и необходимого такелажного оборудования, повышение оперативности развертывания (монтажа и демонтажа) мобильной канатной дороги;
2) расширение возможности использования мобильной канатной дороги в труднодоступных и (или) в заранее необорудованных местностях со сложным природным рельефом (включая, например, горные территории, прибрежные зоны Арктики и Приморья, таежные районы Сибири и т.п.).
Для решения указанных технических задач предлагается способ навешивания каната однопролетной мобильной канатной дороги, включающий применение закрепленного на внешней подвеске летательного аппарата монтажного каната для вытягивания навешиваемого каната, один из концов которого предварительно соединен с одним из концов монтажного каната, заключающийся в том, что для доставки монтажного каната к канатному шкиву противоположной концевой опоры однопролетной канатной дороги используется беспилотный летательный аппарат, причем монтажный канат прикреплен к беспилотному летательному аппарату в промежуточном по своей длине сечении с помощью автоматически отделяемого внешнего прицепного устройства, включающего свободно вращающейся блок с запасованным в его профилированный ручей монтажным канатом, и образует две ветви, конец одной из которых, соединенный с навешиваемым канатом, расположен на временно заторможенном, не вращающемся барабане основной канатной лебедки с навитым на него навешиваемым канатом, а вторая ветвь навита на барабан монтажной канатной лебедки, причем этот барабан имеет возможность свободно вращаться по мере удаления беспилотного летательного аппарата, что приводит к разматыванию монтажного каната в пределах длины пролета канатной дороги, после чего при достижении беспилотным летательным аппаратом канатного шкива противоположной концевой опоры происходит автоматическое отделение прицепного устройства с монтажным канатом, запасовка монтажного каната в ручей канатного шкива и его намотка на барабан монтажной лебедки с вытягиванием навешиваемого каната при свободно вращающемся барабане основной лебедки, его запасовкой в ручей канатного шкива противоположной концевой опоры, дальнейшим протягиванием до барабана монтажной лебедки и соединением обоих концов для образования замкнутого кольцевого контура.
Изобретение поясняется более подробно с помощью чертежей. Все не требующиеся для непосредственного понимания изобретения элементы исключены.
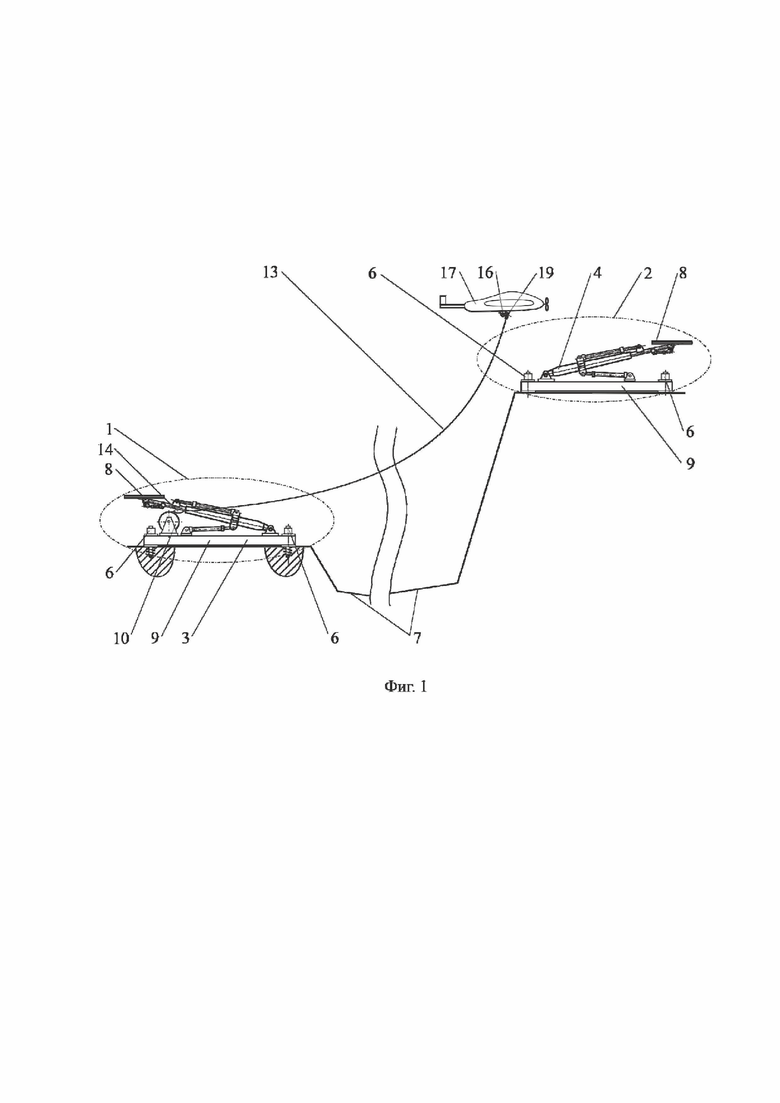
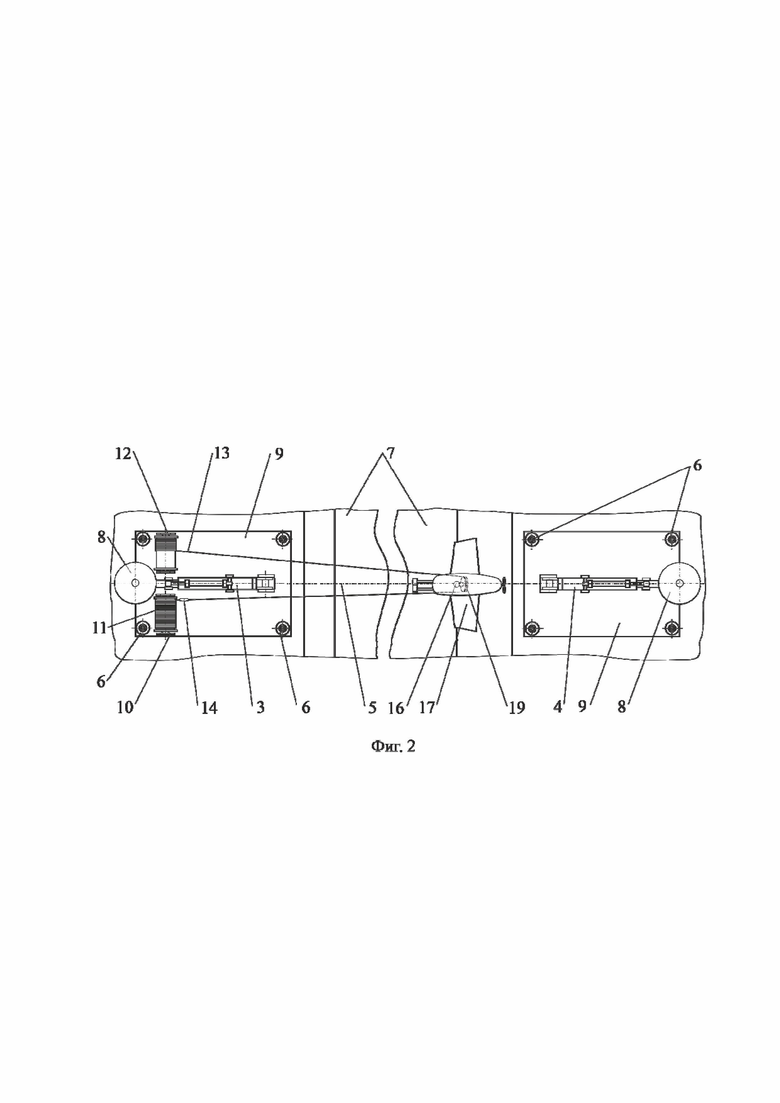
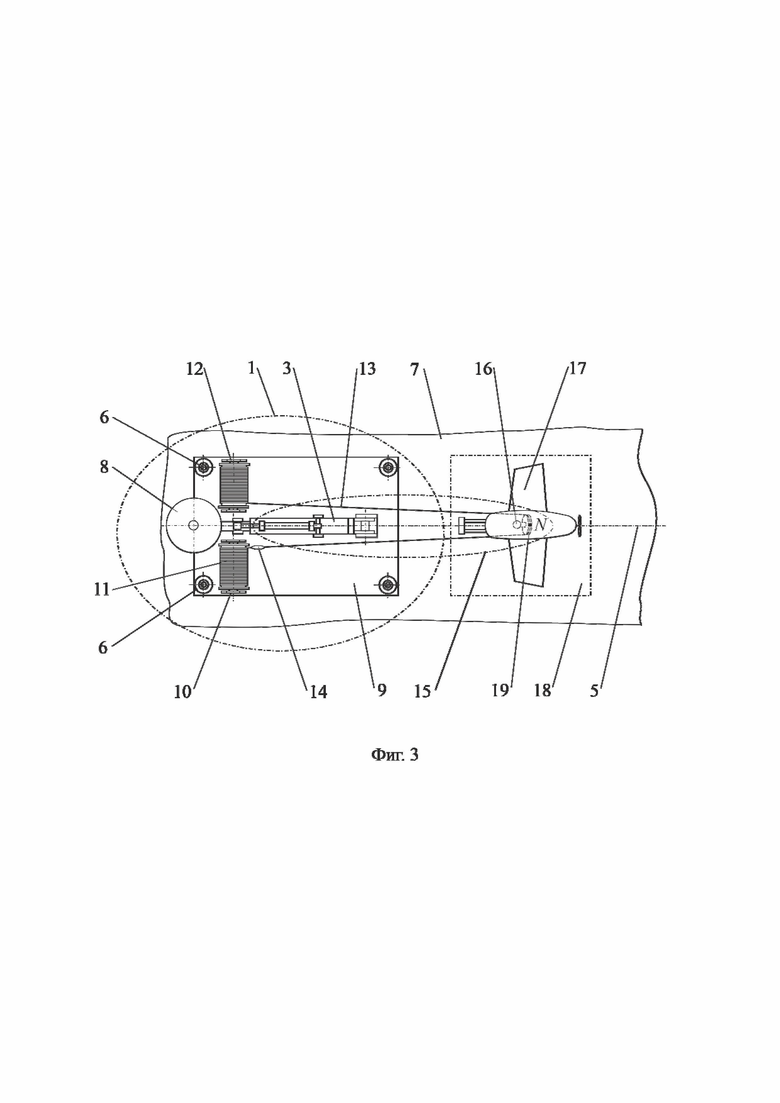
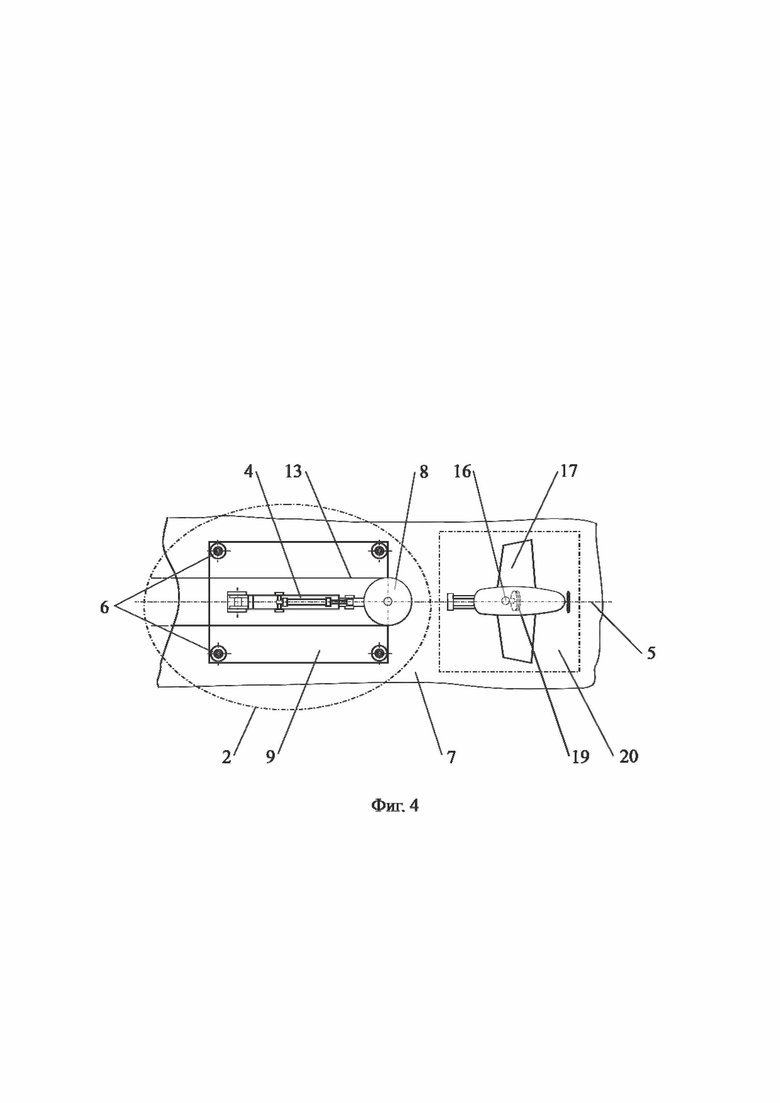
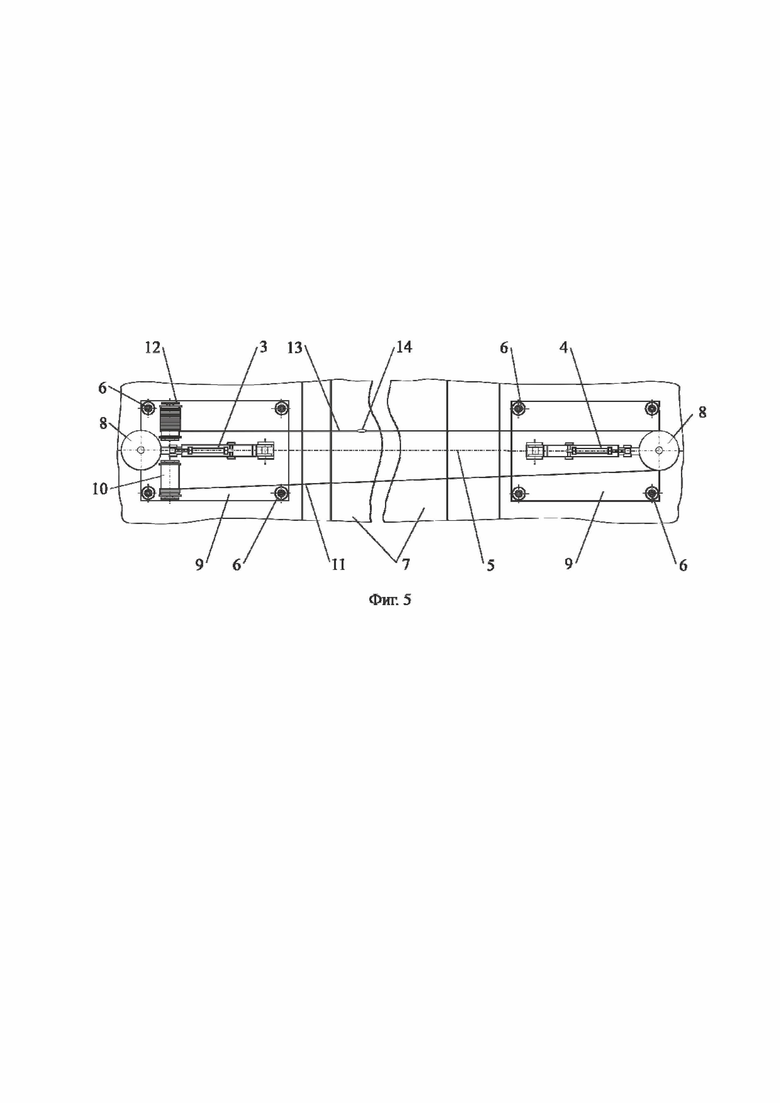
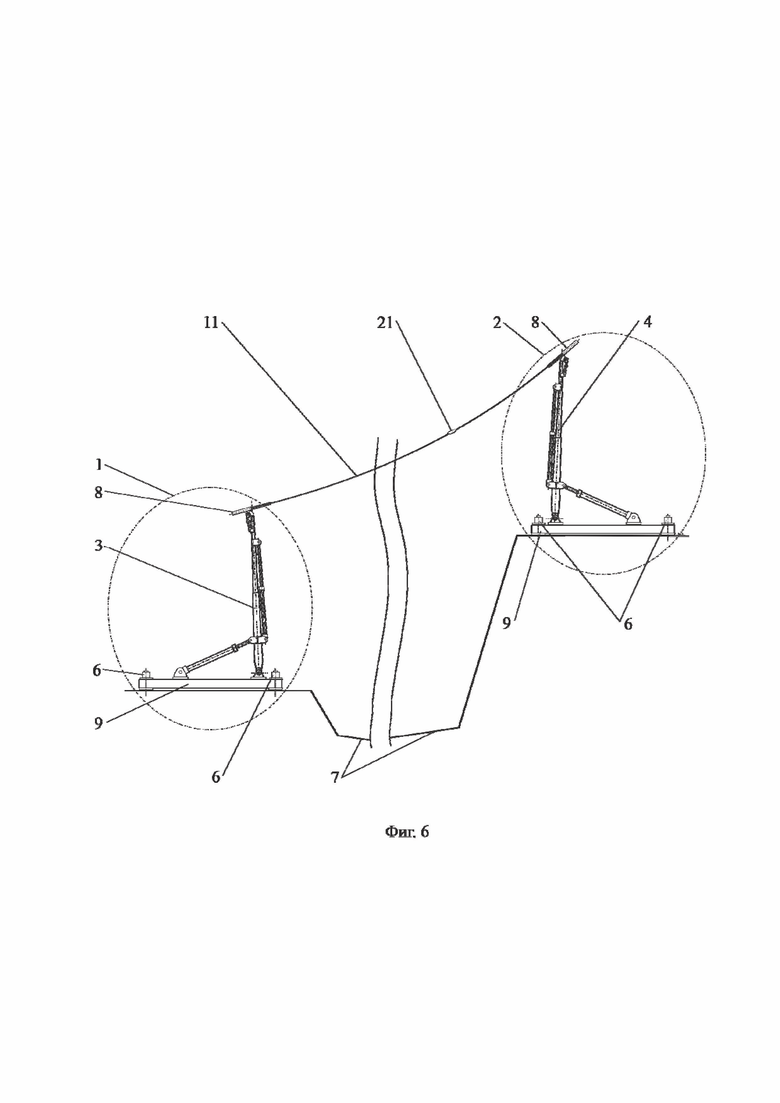
На фиг. 1 показан общий вид сбоку на мобильную канатную дорогу в процессе доставки монтажного каната к противоположной концевой опоре беспилотным летательным аппаратом; на фиг. 2 показан общий вид сверху на мобильную канатную дорогу в процессе доставки монтажного каната к противоположной концевой опоре беспилотным летательным аппаратом; на фиг. 3 показана концевая опора (вид сверху) в момент крепления монтажного каната к беспилотному летательному аппарату; на фиг. 4 показана концевая опора (вид сверху) в момент запасовки монтажного каната в профилированный ручей ее канатного шкива; на фиг. 5 показан общий вид сверху на мобильную канатную дорогу в процессе протягивания навешиваемого каната; на фиг. 6 показан общий вид сбоку на мобильную канатную дорогу после завершения работы по навешиванию каната.
Способ осуществляется следующим образом.
К месту эксплуатации мобильной канатной дороги доставляются, например, автомобильным или воздушным транспортом, две канатные установки 1 (фиг. 1, 3, 6) и 2 (фиг.1,4,6) с концевыми опорами 3 (фиг.1-3,5,6) и 4 (фиг.1,2,4-6) и необходимым технологическим оборудованием для их обслуживания и приведения в движение несущей канатной системы (оборудование условно не показано, так как не влияет на суть изобретения). Они устанавливаются на местности в конечных точках однопролетной канатной дороги и их продольные оси ориентируют вдоль продольной линии трассы 5 (фиг.2-5). Канатные установки 1 (фиг.1,3,6) и 2 (фиг.1,4,6) с помощью опорно-анкерных устройств 6 (фиг.1-5) устанавливаются и закрепляются на поверхности грунта 7 (фиг.1-6) с целью обеспечения их неподвижности во время эксплуатации мобильной канатной дороги и исключения потери общей устойчивости под действием значительных по величине горизонтальных эксплуатационных нагрузок от натяжения канатной системы и веса транспортируемых грузов. При этом концевые опоры 3 (фиг.1-3,5,6) и 4 (фиг.1,2,4-6) находятся в транспортном (сложенном) состоянии, а укрепленные на их оголовках канатные шкивы 8 (фиг.1-6) ориентируются таким образом, что продольные плоскости этих шкивов имеют приблизительно горизонтальное положение.
На рамном основании 9 (фиг.1-6) канатной установки 1 (фиг.1,3,6) устанавливается основная канатная лебедка 10 (фиг.1-3,5) с навитым на ее барабан навешиваемым канатом 11 (фиг.2,3,5,6). Один конец навешиваемого каната 11 (фиг.2,3,5,6) крепится к барабану, а второй оставляется свободным. Также на рамном основании 9 (фиг.1-6) канатной установки 1 (фиг.1,3,6) устанавливается монтажная канатная лебедка 12 (фиг.2,3,5) с навитым на ее барабан монтажным канатом 13 (фиг.1-5). Диаметр монтажного каната 13 (фиг.1-5) значительно меньше, чем диаметр навешиваемого каната 11 (фиг.2,3,5,6), так как он определяется расчетом разрывной прочности монтажного каната 13 (фиг.1-5), который в процессе навески испытывает нагружение только от собственного веса. Один конец монтажного каната 13 (фиг.1-5) крепится к барабану, а второй оставляется свободным. Свободные концы навешиваемого каната 11 (фиг.2,3,5,6) и монтажного каната 13 (фиг.1-5) неподвижно соединяются между собой с помощью монтажного соединительного устройства 14 (фиг.1-3,5), которое располагается в непосредственной близости от барабана основной канатной лебедки 10 (фиг.1-3,5).
Затем из монтажного каната 13 (фиг.1-5) формируется петля 15 (фиг.3). Для этого при заторможенном (не вращающемся) барабане основной канатной лебедки 10 (фиг.1-3,5) выполняется вращение барабана монтажной канатной лебедки 12 (фиг.2,3,5). Образующаяся петля 15 (фиг.3) монтажного каната 13 (фиг.1-5) вытягивается вдоль продольной линии трассы 5 (фиг.2-5) мобильной канатной дороги на длину, необходимую для того, чтобы наиболее удаленная точка N (фиг. 3) петли 15 (фиг.3) достигала внешнего прицепного устройства 16 (фиг.1-4) беспилотного летательного аппарата 17 (фиг.1-4), установленного на стартовой позиции 18 (фиг.3). После чего монтажный канат 13 (фиг.1-5) запасовывается в профилированный ручей блока 19 (фиг.1-4) и закрывается предохранительными элементами, фиксирующими монтажный канат 13 (фиг.1-5) в ручье в процессе полета беспилотного летательного аппарата 17 (фиг.1-4) (условно не показаны, так как не влияют на суть изобретения). Данный этап навешивания несущего каната мобильной канатной дороги показан на фиг. 3.
Затем производится запуск беспилотного летательного аппарата 17 (фиг.1-4) вдоль продольной линии трассы 5 (фиг.2-5) мобильной канатной дороги в сторону противоположной канатной установки 2 (фиг.1,4,6). Во время всего полета беспилотного летательного аппарата 17 (фиг.1-4) барабан основной канатной лебедки 10 (фиг.1-3,5) заторможен (не вращается), а барабан монтажной канатной лебедки 12 (фиг.2,3,5) имеет возможность свободного вращения. Вследствие тягового воздействия на монтажный канат 13 (фиг.1-5) со стороны беспилотного летательного аппарата 17 (фиг.1-4), передающегося посредством внешнего прицепного устройства 16 (фиг.1-4) и свободно вращающегося блока 19 (фиг.1-4), происходит разматывание монтажного каната 13 (фиг.1-5) с равным увеличением длины его обеих ветвей. Данный этап навешивания несущего каната мобильной канатной дороги показан на фиг. 1 и 2.
При достижении беспилотным летательным аппаратом 17 (фиг.1-4) противоположной канатной установки 2 (фиг.1,4,6) он опускается на посадочную позицию 20 (фиг.4). Производится вывод монтажного каната 13 (фиг.1-5) из профилированного ручья блока 19 (фиг.1-4) внешнего прицепного устройства 16 (фиг.1-4) и его запасовка в профилированный ручей канатного шкива 8 (фиг.1-6) канатной установки 2 (фиг.1,4,6). Данный этап навешивания несущего каната мобильной канатной дороги показан на фиг. 4.
Далее производится сматывание монтажного каната 13 (фиг.1-5) на барабан монтажной канатной лебедки 12 (фиг.2,3,5). При этом барабан основной канатной лебедки 10 (фиг.1-3,5) растормаживается и получает возможность свободного вращения. По мере наматывания монтажного каната 13 (фиг.1-5) происходит постепенное перемещение свободного конца навешиваемого каната 11 (фиг.2,3,5,6) по направлению к противоположной канатной установке 2 (фиг.1,4,6), затем вхождение каната в профилированный ручей и огибание канатного шкива канатной установки 2 (фиг.1,4,6), затем перемещение по направлению к канатной установке 1 (фиг.1,3,6). Данный этап навешивания несущего каната мобильной канатной дороги показан на фиг. 5.
При достижении свободным концом навешиваемого каната 11 (фиг.2,3,5,6) канатной установки 1 (фиг.1,3,6) вращение барабана монтажной канатной лебедки 12 (фиг.2,3,5) прекращается. Производится раскрытие монтажного соединительного устройства 14 (фиг.1-3,5) и отсоединение монтажного каната 13 (фиг.1-5) от навешиваемого каната 11 (фиг.2,3,5,6). Противоположный конец навешиваемого каната 11 (фиг.2,3,5,6) отсоединяется от барабана основной канатной лебедки 10 (фиг.1-3,5), после чего оба его конца соединяются штатным соединительным устройством 21 (фиг.6). Основная канатная лебедка 10 (фиг.1-3,5) с пустым барабаном и монтажная канатная лебедка 12 (фиг.2,3,5) с навитым на барабан монтажным канатом 13 (фиг.1-5) при дальнейшей штатной эксплуатации мобильной канатной дороги не используются, поэтому они могут быть сняты с рамного основания 9 (фиг.1-6) канатной установки 1 (фиг.1,3,6). Однако в этом случае при демонтаже мобильной канатной дороги при ее перебазировании на новое место эксплуатации они должны быть заново установлены на рамном основании 9 (фиг.1-6), так как технологический процесс снятия несущего каната производится в обратной последовательности.
В завершении процесса навешивания несущего каната выполняется перевод концевых опор 3 (фиг.1-3,5,6) и 4 (фиг.1,2,4-6) из транспортного (сложенного) состояния в рабочее состояние и производится требуемое эксплуатационное натяжение несущей канатной системы мобильной канатной дороги. Общий вид мобильной канатной дороги в рабочем состоянии показан на фиг. 6.
Сформулированные выше технико-экономические результаты, которые могут быть получены при использовании предлагаемого изобретения, достигаются за счет исключения из числа технологических операций, которые необходимо выполнить в процессе навешивания несущего каната однопролетной мобильной канатной дороги, тех операций (и того реализующего их транспортного и механизированного оборудования, а также такелажной оснастки), которые связаны с необходимостью использования земной поверхности на всем протяжении трассы канатной дороги и с проведением комплекса необходимых земляных, очистных и дорожных работ. Это существенно снижает материально-финансовые затраты, повышает оперативность развертывания (монтажа и демонтажа) мобильной канатной дороги, а также расширяет возможности ее использования в труднодоступных и (или) в заранее необорудованных местностях со сложным природным рельефом.
Экспликация позиций на фигурах
| название | год | авторы | номер документа |
|---|---|---|---|
| БЫСТРОМОНТИРУЕМАЯ МОБИЛЬНАЯ КАНАТНАЯ ДОРОГА | 2022 |
|
RU2780877C1 |
| МОДУЛЬНАЯ МОБИЛЬНАЯ КАНАТНАЯ ДОРОГА | 2023 |
|
RU2818434C1 |
| Мобильный буксировочный бугельный подъемник | 2016 |
|
RU2619352C1 |
| ПОДВЕСНАЯ КАНАТНАЯ ДОРОГА | 2005 |
|
RU2287444C1 |
| ПОДВЕСНАЯ КАНАТНАЯ ДОРОГА | 2003 |
|
RU2247671C1 |
| МОБИЛЬНАЯ ПОДВЕСНАЯ КАНАТНАЯ ДОРОГА | 2005 |
|
RU2283787C1 |
| Самоходная канатно-скреперная установка | 1982 |
|
SU1023035A1 |
| МОБИЛЬНАЯ ПОДВЕСНАЯ КАНАТНАЯ ДОРОГА | 2006 |
|
RU2324613C2 |
| МОБИЛЬНАЯ ПОДВЕСНАЯ КАНАТНАЯ ДОРОГА | 2007 |
|
RU2337023C1 |
| СПОСОБ МОНТАЖА ГИБКОГО ЭЛЕМЕНТА С ПОМОЩЬЮ ВЕРТОЛЕТА | 2011 |
|
RU2481683C1 |
Изобретение относится к области эксплуатации подъемно-транспортного оборудования. Способ навешивания каната однопролетной мобильной канатной дороги включает применение закрепленного на внешней подвеске летательного аппарата монтажного каната для вытягивания навешиваемого каната, один из концов которого предварительно соединен с одним из концов монтажного каната. Для доставки монтажного каната к канатному шкиву противоположной концевой опоры однопролетной канатной дороги используют беспилотный летательный аппарат. Монтажный канат, прикрепленный к беспилотному летательному аппарату, образует две ветви, конец одной из которых, соединенный с навешиваемым канатом, расположен на временно заторможенном, не вращающемся барабане основной канатной лебедки с навитым на него навешиваемым канатом, а вторая ветвь навита на барабан монтажной канатной лебедки. Этот барабан имеет возможность свободно вращаться по мере удаления беспилотного летательного аппарата, что приводит к разматыванию монтажного каната в пределах длины пролета канатной дороги. При достижении беспилотным летательным аппаратом канатного шкива противоположной концевой опоры автоматически отделяют прицепное устройство с монтажным канатом, запасовывают монтажный канат в ручей канатного шкива и наматывают его на барабан монтажной лебедки с вытягиванием навешиваемого каната при свободно вращающемся барабане основной лебедки, его запасовкой в ручей канатного шкива противоположной концевой опоры. Далее протягивают до барабана монтажную лебедку и соединяют оба конца для образования замкнутого кольцевого контура. В результате повышается оперативность развертывания (монтажа и демонтажа) мобильной канатной дороги, расширяются возможности использования мобильной канатной дороги в труднодоступных и (или) в заранее необорудованных местностях со сложным природным рельефом. 6 ил.
Способ навешивания каната однопролетной мобильной канатной дороги, включающий применение закрепленного на внешней подвеске летательного аппарата монтажного каната для вытягивания навешиваемого каната, один из концов которого предварительно соединен с одним из концов монтажного каната, отличающийся тем, что для доставки монтажного каната к канатному шкиву противоположной концевой опоры однопролетной канатной дороги используют беспилотный летательный аппарат, причем монтажный канат прикрепляют к беспилотному летательному аппарату в промежуточном по своей длине сечении с помощью автоматически отделяемого внешнего прицепного устройства, включающего свободно вращающейся блок с запасованным в его профилированный ручей монтажным канатом, и образуют две ветви, конец одной из которых, соединенный с навешиваемым канатом, располагают на временно заторможенном, не вращающемся барабане основной канатной лебедки с навитым на него навешиваемым канатом, а вторую ветвь навивают на барабан монтажной канатной лебедки, причем этот барабан имеет возможность свободно вращаться по мере удаления беспилотного летательного аппарата, что приводит к разматыванию монтажного каната в пределах длины пролета канатной дороги, после чего при достижении беспилотным летательным аппаратом канатного шкива противоположной концевой опоры автоматически отделяют прицепное устройство с монтажным канатом, запасовывают монтажный канат в ручей канатного шкива и наматывают его на барабан монтажной лебедки с вытягиванием навешиваемого каната при свободно вращающемся барабане основной лебедки, его запасовкой в ручей канатного шкива противоположной концевой опоры, далее протягивают до барабана монтажную лебедку и соединяют оба конца для образования замкнутого кольцевого контура.
| DE 3429196 A, 04.10.1990 | |||
| Способ навески прядевых канатов шахтных подъемных установок | 1988 |
|
SU1562278A1 |
| СПОСОБ РАСКАТКИ НЕСУЩЕГО КАНАТА ПОДВЕСНОЙ КАНАТНОЙ ДОРОГИ | 0 |
|
SU351739A1 |
| Устройство для освоения горной лесосеки | 1986 |
|
SU1371618A1 |

