Изобретение относится к пассивной радиолокации и может быть использовано для определения координат и параметров движения наземных (надводных) источников радиоизлучений (ИРИ) с помощью аппаратуры радиотехнической разведки (РТР), установленной на борту летательного аппарата (ЛА).
Определение дальности до ИРИ и скорости сближения с ним может быть обеспечено различными способами, среди которых наибольшее распространение получили позиционные способы, включающие азимутально-угломестный, триангуляционный и кинематический, а также позиционно-скоростные способы, включающие псевдотриангуляционный и динамико-кинематический [1, 2].
Азимутально-угломестный способ использует результаты одновременного измерения азимута и угла места ИРИ. Однако сфера его применения ограничена только неподвижными ИРИ, расположенными на земной поверхности.
Триангуляционный способ определения положения ИРИ использует формульные зависимости между сторонами и углами треугольника, вершины которого связаны с ИРИ и ЛА - носителем аппаратуры РТР. Однако сфера его применения ограничена также только неподвижными наземными ИРИ.
Разновидности кинематического способа опираются на знание уравнений, описывающих процесс взаимного перемещения ЛА и ИРИ, в том числе и движущегося. В литературе [2] показано, что основным недостатком известных кинематических способов является достаточно низкая точность определения дальности до подвижных ИРИ и скорости сближения с ними, повышение которой можно обеспечить лишь за счет увеличения тангенциальной составляющей скорости движения ИРИ относительно ЛА в результате маневра ЛА с отворотом от ИРИ, что вступает в противоречие с необходимостью выдерживания определенной траектории полета ЛА.
Псевдотриангуляционный способ определения дальности и скорости сближения с подвижным ИРИ по угломерным данным разработан как альтернатива триангуляционному способу, но во многом схож с ним. Основное достоинство данного способа состоит в относительной простоте реализации. В литературе [2] показано, что с помощью псевдотриангуляционного способа можно достаточно точно оценивать дальность до ИРИ и скорость сближения с ним, однако высокая точность оценивания может быть достигнута лишь при выполнении ЛА отворота от ИРИ на достаточно большой угол. Кроме этого, при определении координат движущихся ИРИ данным способом необходимо дополнительно оценивать производные координат до третьего порядка включительно, что накладывает на способ существенные ограничения.
Динамико-кинематический способ основан на математическом описании в пространстве состояний собственного или относительного движения ИРИ и ЛА. В литературе [2] дано достаточно подробное описание разновидностей данного способа и показано, что такой подход к решению задачи определения дальности и скорости сближения с неманеврирующим ИРИ позволяет использовать их на практике. Однако при маневре ИРИ применение указанного способа может приводить к формированию расходящихся оценок дальности до источника радиоизлучений и скорости сближения с ним [2].
Отличительной особенностью перечисленных позиционных и позиционно-скоростных способов определения координат и параметров движения ИРИ является использование в качестве входной информации высокоточных измерений угловых координат и/или проекций угловой скорости вращения линии визирования наблюдаемых источников радиоизлучений. Это делает необходимым включение в состав аппаратуры РТР пеленгационного устройства с антенной системой, состоящей из нескольких элементов. Вместе с тем, на борту ЛА некоторых классов по аэродинамическим и массогабаритным ограничениям размещение указанных антенных систем не представляется возможным.
В литературе [3, С. 25-31] описан способ определения координат ИРИ, который может быть реализован в бортовой аппаратуре РТР с малогабаритной неподвижной одноэлементной слабонаправленной антенной. В его основе лежит возможность приема аппаратурой РТР зондирующих сигналов радиолокационных станций (РЛС), излучаемых как по главному, так и боковым лепесткам диаграммы направленности антенны.
Согласно способу, предварительно назначают РЛС, работающие в режиме кругового обзора и подлежащие радиотехнической разведке. Экспериментально измеряют диаграммы направленности их антенн в области главного, боковых и заднего лепестков. Используя экспериментальные данные строят и запоминают зависимости длительности приема аппаратурой РТР сигналов каждой из назначенных РЛС от дальности до нее, имеющие монотонно убывающий характер по мере увеличения дальности.
В процессе полета ЛА с помощью бортового навигационного датчика определяют собственные координаты, а с помощью аппаратуры РТР обнаруживают и идентифицируют сигналы разведуемой РЛС. В каждом периоде ее обзора измеряют длительность приема обнаруженных сигналов, как интервал времени между моментом первого и последнего обнаружения. С использованием зависимости длительности приема сигналов от дальности до РЛС, хранящейся в запоминающем устройстве аппаратуры РТР, оценивают ее удаленность. По результатам обработки нескольких косвенных измерений дальности до РЛС с учетом измерений собственных координат ЛА формируют наиболее правдоподобные оценки прямоугольных координат ИРИ.
К недостаткам способа [3, С. 25-31] следует отнести ограниченность сферы применения только РЛС с известными диаграммами направленности антенн, функционирующими в режиме обзора, а также относительно низкую точность определения их плоских координат из-за флуктуаций мощности принимаемых аппаратурой РТР сигналов и ошибок измерения длительности приема сигналов РЛС.
Известен способ пассивной однопозиционной угломерно-разностно-доплеровской локации перемещающегося в пространстве радиоизлучающего объекта [4]. Согласно способу, с помощью бортовой пассивной радиолокационной станции (ПРЛС) обнаруживают сигналы радиоизлучающего объекта (РИО) и определяют его параметры -ширину спектра, среднюю частоту спектра сигнала и вид его модуляции. Осуществляют автосопровождение выбранного объекта по угловым координатам, измеряют и запоминают значение отсчетов угловых координат (азимута β и угла места ε), а также текущего времени, соответствующего этим отсчетам. Затем восстанавливают, зная вид модуляции, несущую частоту fн принятого сигнала, формируют в моменты времени ti и запоминают значения ее отсчетов. Далее вычисляют приращения угловых координат и доплеровских сдвигов частоты принимаемых сигналов на интервалах Δtk,n, достаточно малых для справедливости предположения о равномерности и прямолинейности движения РИО со скоростью V на постоянной высоте H.
После этого определяют горизонтальные составляющие приращений доплеровских сдвигов частоты, находят эти приращения и вычисляют величину их отношения
для нахождения величины угла α между вектором скорости и горизонтальной дальностью. Далее определяют текущие значения курсового угла qk=βk+α и модуль горизонтальной скорости Vг=V, а затем - расстояние S4.0, пройденное объектом за интервал времени Δt4.0. Затем находят радиус R окружности, проходящей через начало координат, хордой которой является расстояние S4,0, находят центр O' этой окружности, фиксируя точку на конце луча длиной R, проведенного из начала координат О под углом βц=β0+q4 - 90°, рассчитывают дальности d0 и d4, используя соотношения

и определяют координаты РИО в моменты времени t0 и t4 как точки пересечения окружности с центром О' и лучей длиной d0 и d4, проведенных из начала координат под углами β0 и β4.
Наконец, вычисляют интерполированные dk=1,2,3 и экстраполированные dk≥4 значения дальностей на интервале сохранения гипотезы о равномерном и прямолинейном движении радиоизлучающего объекта на постоянной высоте и осуществляют построение траектории движения РИО в пространстве на начальном интервале кусочно-линейной аппроксимации, а в случае кратковременного пропадания сигнала - ее прогнозируемое значение.
К числу недостатков способа [4] следует отнести необходимость использования в составе ПРЛС следящего пеленгационного устройства, а также наличие временной задержки в формировании оценок координат и параметров движения РИО относительно момента начала его наблюдения. Кроме того, способ не предназначен для реализации в ПРЛС, установленной на движущемся носителе.
Наиболее близким по технической сущности к заявляемому способу является способ определения дальности до наземного (надводного) движущегося ИРИ и скорости сближения с ним [5, С. 332-340], заключающийся в том, что на борту ЛА в нормальной земной системе координат (НЗСК) измеряют текущее местоположение ЛА (хла, ула, zлa), тангаж и угол рыскания ЛА (ϑ, ψ). С помощью ПРЛС принимают радиосигналы от ИРИ в результате чего измеряют значения его пеленгов (φг, φв) в связанной с осями ЛА системе координат. Измерения пеленгов с учетом углов (ϑ, ψ) преобразуют в углы визирования ИРИ (εги, εви) в горизонтальной и вертикальной плоскостях НЗСК соответственно.
На первом, предварительном, этапе в момент времени tk-1 измеренные координаты ЛА хла(k-1), ула(k-1), zла(k-1) и углы визирования ИРИ в горизонтальной εги(k-1) и вертикальной εви(k-1)плоскостях запоминают. Дисперсии погрешностей измерений углов визирования ИРИ  запоминают в виде компонент матрицы шумов измерений
запоминают в виде компонент матрицы шумов измерений 
По запомненным значениям измеренных координат ЛА хла(k-1), ула(k-1), zлa(k-1) и углов визирования ИРИ εги(k-1), εви(k-1) вычисляют начальные оценки прямоугольных координат ИРИ  и
и  в горизонтальной плоскости НЗСК
в горизонтальной плоскости НЗСК


По априорной информации о типе носителя ИРИ вычисляют начальные оценки проекций векторов скорости 
 и ускорения
и ускорения 
 ИРИ на оси X и Z НЗСК
ИРИ на оси X и Z НЗСК


где верхние индексы «min» и «max» в обозначениях скорости Vири и ускорения аири указывает на априорно известные минимально и максимально возможные значения соответствующего параметра.
Сформированные начальные оценки прямоугольных координат и параметров движения ИРИ запоминают в виде соответствующих компонент вектора начальных оценок параметров состояния ИРИ

Рассчитывают и запоминают дисперсии и корреляционные моменты ошибок соответствующих начальных оценок параметров состояния ИРИ в виде компонент корреляционной матрицы ошибок фильтрации R(k-1) по формулам





Рассчитывают компоненты переходной матрицы Ф(k, k-1) и корреляционной матрицы формирующих шумов Dx по априорным данным о динамических характеристиках носителя ИРИ в соответствии с выражениями
Ф(k, k-1)=diag{ϕ(αx), ϕ(αz)},
Dx=diag{d(αx,σx), d(αz,σz)},

где diag(…) - символ диагональной матрицы,
αх, αz и  - ширины спектральных плотностей мощности и дисперсии проекций ускорения носителя ИРИ, задаваемые исходя из априорных сведений о его динамических характеристиках,
- ширины спектральных плотностей мощности и дисперсии проекций ускорения носителя ИРИ, задаваемые исходя из априорных сведений о его динамических характеристиках,
Т=tk-tk-1 - интервал дискретизации по времени.
С использованием вектора оценок параметров состояния ИРИ и переходной матрицы рассчитывают экстраполированные на следующий tk момент времени оценки параметров состояния по формуле

где  - вектор экстраполированных оценок параметров состояния ИРИ,
- вектор экстраполированных оценок параметров состояния ИРИ,
 - экстраполированные прямоугольные координаты ИРИ,
- экстраполированные прямоугольные координаты ИРИ,

 - экстраполированные проекции векторов скорости и ускорения движения ИРИ на соответствующие оси НЗСК.
- экстраполированные проекции векторов скорости и ускорения движения ИРИ на соответствующие оси НЗСК.
С использованием корреляционной матрицы ошибок фильтрации, переходной матрицы и корреляционной матрицы формирующих шумов рассчитывают компоненты корреляционной матрицы  ошибок экстраполяции по формуле
ошибок экстраполяции по формуле

Компоненты вектора экстраполированных оценок параметров состояния ИРИ  и корреляционной матрицы ошибок экстраполяции
и корреляционной матрицы ошибок экстраполяции  запоминают.
запоминают.
На втором основном этапе, в момент времени tk измеряют собственные прямоугольные координаты ЛА хла(k), ула(k), zла(k), проекции вектора его скорости на оси НЗСК Vлах(k), Vлау(k), Vлaz(k) и принимают радиосигналы от ИРИ, по которым формируют измерения углов визирования εги(k) и εви(k). Измеренные значения углов визирования запоминают в виде компонент вектора наблюдений Z(k)=[εги(k) εви(k)]T.
По измеренным значениям координат ЛА и запомненному вектору экстраполированных оценок параметров состояния ИРИ рассчитывают компоненты вектора экстраполированных наблюдений  и матрицы пересчета (линеаризации)Н(k) вектора экстраполированных оценок
и матрицы пересчета (линеаризации)Н(k) вектора экстраполированных оценок  в вектор экстраполированных наблюдений
в вектор экстраполированных наблюдений  по формулам
по формулам

где  - компоненты вектора экстраполированных оценок параметров состояния ИРИ
- компоненты вектора экстраполированных оценок параметров состояния ИРИ 


С использованием рассчитанных компонент матрицы пересчета, а также запомненных корреляционных матриц ошибок экстраполяции и погрешностей наблюдений рассчитывают компоненты матрицы коэффициентов усиления «невязок» по формуле

здесь символ «-1» определяет операцию обращения матрицы.
По запомненным векторам экстраполированных оценок параметров состояния ИРИ, наблюдений и экстраполированных наблюдений, а также матрицы коэффициентов усиления «невязок» рассчитывают вектор оценок параметров состояния ИРИ по формуле

По запомненным корреляционной матрице ошибок экстраполяции, матрице коэффициентов усиления «невязок» и матрице пересчета рассчитывают корреляционную матрицу ошибок фильтрации по формуле

где I - единичная матрица размером (6×6).
По оцененным значениям координат и скорости ИРИ 
 измеренным значениям координат ЛА хла(k), ула(k), zла(k) и проекций его скорости Vлах(k), Vлау(k), Vлaz(k) определяют наклонную дальность до ИРИ
измеренным значениям координат ЛА хла(k), ула(k), zла(k) и проекций его скорости Vлах(k), Vлау(k), Vлaz(k) определяют наклонную дальность до ИРИ  и скорость сближения с ним
и скорость сближения с ним  . Значения дальности
. Значения дальности  и скорости сближения с ИРИ
и скорости сближения с ИРИ  передают потребителю.
передают потребителю.
Компоненты вектора оценок параметров состояния ИРИ  и корреляционной матрицы ошибок оценивания R(k) запоминают. Далее описанный процесс, начиная со второго этапа, повторяют.
и корреляционной матрицы ошибок оценивания R(k) запоминают. Далее описанный процесс, начиная со второго этапа, повторяют.
Недостатком описанного способа является использование в качестве исходной информации высокоточных измерений угловых координат наблюдаемых ИРИ, циклически формируемых пеленгационным устройством ПРЛС. Это ограничивает возможность его применения в бортовой аппаратуре РТР со слабонаправленной антенной системой.
Целью изобретения является обеспечение возможности определения координат и параметров движения наземных (надводных) ИРИ с неизвестными параметрами диаграмм направленности антенн, вне зависимости от режима их работы с помощью бортовой аппаратуры РТР со слабонаправленной малогабаритной антенной системой.
Указанный результат достигается измерением в бортовом навигационном датчике ЛА собственных координат и проекций скорости в НЗСК, высокоточным измерением в бортовой аппаратуре РТР несущей частоты принимаемых сигналов наблюдаемого ИРИ, аналогично тому, как формируются указанные измерения в [4], дискретной нелинейной фильтрацией вектора параметров состояния ИРИ, включающего его горизонтальные координаты, проекции скорости в НЗСК, а также несущую частоту излучаемых сигналов, преобразованием параметров состояния ИРИ в косвенные оценки дальности до источника радиоизлучений и скорости сближения с ним.
В основе способа используется зависимость несущей частоты принимаемых аппаратурой РТР сигналов от координат и параметров движения ИРИ, описываемая выражением

где fn - несущая частота сигналов, принимаемых аппаратурой РТР,
f н - несущая частота сигналов, излучаемых ИРИ,
f д - доплеровский сдвиг частоты,
с - скорость распространения радиоволн в атмосфере.
Таким образом, при известных прямоугольных координатах и проекциях скорости ЛА, а также несущей частоте сигналов, излучаемых ИРИ, в измерениях несущей частоты сигналов, принимаемых аппаратурой РТР, содержатся сведения о координатах и проекциях скорости источника радиоизлучений. Поэтому указанные измерения целесообразно использовать для определения координат и параметров движения ИРИ. Присущая на практике априорная неопределенность относительно значений несущей частоты сигналов, излучаемых ИРИ, может быть устранена путем ее оценивания совместно с координатами и параметрами движения источника радиоизлучений.
Предлагаемый способ работы аппаратуры РТР на борту ЛА включает
на первом этапе измерение в tk моменты времени прямоугольных координат ЛА xла(k), yла(k), zла(k) и проекций его скорости Vлах(k), Vлау(k), Vлаz(k) в НЗСК;
прием аппаратурой РТР радиосигналов от ИРИ и формирование компонент вектора наблюдений Z(k);
назначение вектора параметров состояния ИРИ X;
расчет компонент переходной матрицы Ф(k, k-1) и корреляционной матрицы формирующих шумов Dx по априорным данным о динамических характеристиках; назначение матрицы шумов наблюдений Dz;
назначение начального вектора экстраполированных наблюдений  равным начальному вектору наблюдений Z(k-1);
равным начальному вектору наблюдений Z(k-1);
расчет компонент вектора начальных оценок параметров состояния ИРИ 
расчет корреляционной матрицы начальных ошибок фильтрации R(k-1);
на втором, основном, этапе расчет вектора текущих оценок параметров состояния ИРИ  по алгоритму расширенного фильтра Калмана в последовательности:
по алгоритму расширенного фильтра Калмана в последовательности:
расчет вектора экстраполированных оценок параметров состояния ИРИ  в следующий tk момент времени по результатам расчета вектора оценок параметров состояния ИРИ в предыдущий момент времени
в следующий tk момент времени по результатам расчета вектора оценок параметров состояния ИРИ в предыдущий момент времени  по формуле
по формуле

расчет корреляционной матрицы ошибок экстраполяции  по предшествующему значению корреляционной матрицы ошибок фильтрации
по предшествующему значению корреляционной матрицы ошибок фильтрации  фундаментальной матрицы Ф(k,k-1) и корреляционной матрицы формирующего шума Dx в соответствии с формулой
фундаментальной матрицы Ф(k,k-1) и корреляционной матрицы формирующего шума Dx в соответствии с формулой

расчет вектора экстраполированных наблюдений  на момент времени;
на момент времени;
расчет вектора  текущих оценок параметров состояния ИРИ по значениям векторов экстраполированных оценок параметров состояния ИРИ
текущих оценок параметров состояния ИРИ по значениям векторов экстраполированных оценок параметров состояния ИРИ  и экстраполированных наблюдений
и экстраполированных наблюдений  в соответствии с формулами
в соответствии с формулами



где K(k) - матрица коэффициентов усиления «невязок»; Н(k) - матрица линеаризованных связей между измерениями аппаратуры РТР и параметрами состояния ИРИ;
расчет корреляционной матрицы ошибок фильтрации по формуле

расчет наклонной дальности  до ИРИ и скорости сближения с ним
до ИРИ и скорости сближения с ним  по координатам вектора оценок параметров состояния ИРИ
по координатам вектора оценок параметров состояния ИРИ  измеренным значениям координат ЛА хла(k), ула(k), zлa(k) и проекций его скорости Vлах(k), Vлау(k), Vлаz(k) по формулам
измеренным значениям координат ЛА хла(k), ула(k), zлa(k) и проекций его скорости Vлах(k), Vлау(k), Vлаz(k) по формулам


где  и
и  - оценки прямоугольных координат и проекций скорости ИРИ в НЗСК;
- оценки прямоугольных координат и проекций скорости ИРИ в НЗСК;
выдача оценок дальности и скорости сближения с ИРИ  потребителю;
потребителю;
запоминание компонент вектора оценок параметров состояния ИРИ  и корреляционной матрицы ошибок фильтрации R(k); описанный процесс, начиная со второго этапа, повторяют;
и корреляционной матрицы ошибок фильтрации R(k); описанный процесс, начиная со второго этапа, повторяют;
отличается тем, что в результате приема аппаратурой РТР в каждый tk момент времени радиосигнала от ИРИ измеряют его несущую частоту fпи(k), которую запоминают в виде компоненты вектора (скаляра) наблюдений Z(k)=fпи(k);
назначают вектор параметров состояния ИРИ в виде Х=[хири, Vирих, zири, Vириz, fн]Т,
где хири, zири и Vирих, Vириz - координаты и проекции скорости ИРИ в горизонтальной плоскости НЗСК,
f н - несущая частота сигналов, излучаемых ИРИ;
рассчитывают компоненты переходной матрицы Ф(k, k-1) и корреляционной матрицы формирующих шумов Dx, в предположении постоянства несущей частоты ИРИ, по формулам



где diag(…) - символ диагональной матрицы,
 - дисперсии проекций ускорения ИРИ и его несущей частоты, задаваемые исходя из априорных сведений о динамических характеристиках и типе источника радиоизлучений,
- дисперсии проекций ускорения ИРИ и его несущей частоты, задаваемые исходя из априорных сведений о динамических характеристиках и типе источника радиоизлучений,
Т=tk-tk-1 - интервал дискретизации по времени;
назначают матрицу шумов измерений Dz по априорно известной дисперсии погрешности измерения несущей частоты принятых сигналов  в виде
в виде 
на первом этапе назначают компоненты вектора начальных оценок параметров состояния ИРИ  по априорным данным о возможном местоположении ИРИ,
по априорным данным о возможном местоположении ИРИ,
максимальной скорости его движения, а также начально измеренной несущей частоте принятого сигнала по формулам



где верхние индексы «min» и «max» в обозначениях координат и проекций скорости указывает на априорно известные минимально и максимально возможные значения соответствующего параметра;
рассчитывают компоненты корреляционной матрицы начальных ошибок фильтрации R(k-1) по априорным данным о возможном местоположении ИРИ, максимальной скорости его движения, дисперсии погрешности измерений несущей частоты принимаемых сигналов, а также начально измеренной несущей частоте принятого сигнала по формулам
R(k-1)=diag{R1, R2, R3, R4, R5},




где  - градиент нелинейной функции
- градиент нелинейной функции  по вектору начальных оценок
по вектору начальных оценок 
на втором этапе в процессе расчета вектора текущих оценок параметров состояния ИРИ  по алгоритму расширенного фильтра Калмана:
по алгоритму расширенного фильтра Калмана:
проводят расчет компонента вектора (скаляра) экстраполированных наблюдений  на tk-й момент времени по формуле
на tk-й момент времени по формуле

где  и
и  - компоненты вектора экстраполированных оценок параметров состояния ИРИ
- компоненты вектора экстраполированных оценок параметров состояния ИРИ 
проводят расчет компонентов матрицы Н(k) линеаризованных связей между измерениями аппаратуры РТР и параметрами состояния ИРИ по формуле

где 
Сущность предлагаемого способа определения дальности до ИРИ и скорости сближения с ним с помощью бортовой аппаратуры РТР поясняется дальнейшим описанием и чертежами.
На фиг. 1 представлена проекция на горизонтальную плоскость НЗСК траектории движения ЛА относительно ИРИ при моделировании.
На фиг. 2 представлены временные зависимости дальности до ИРИ и скорости сближения с ним при моделировании.
На фиг. 3 представлена временная зависимость ошибки определения наклонной дальности до ИРИ предлагаемым способом, а также показан коридор ошибок определения дальности до ИРИ «3 сигма», полученные при моделировании.
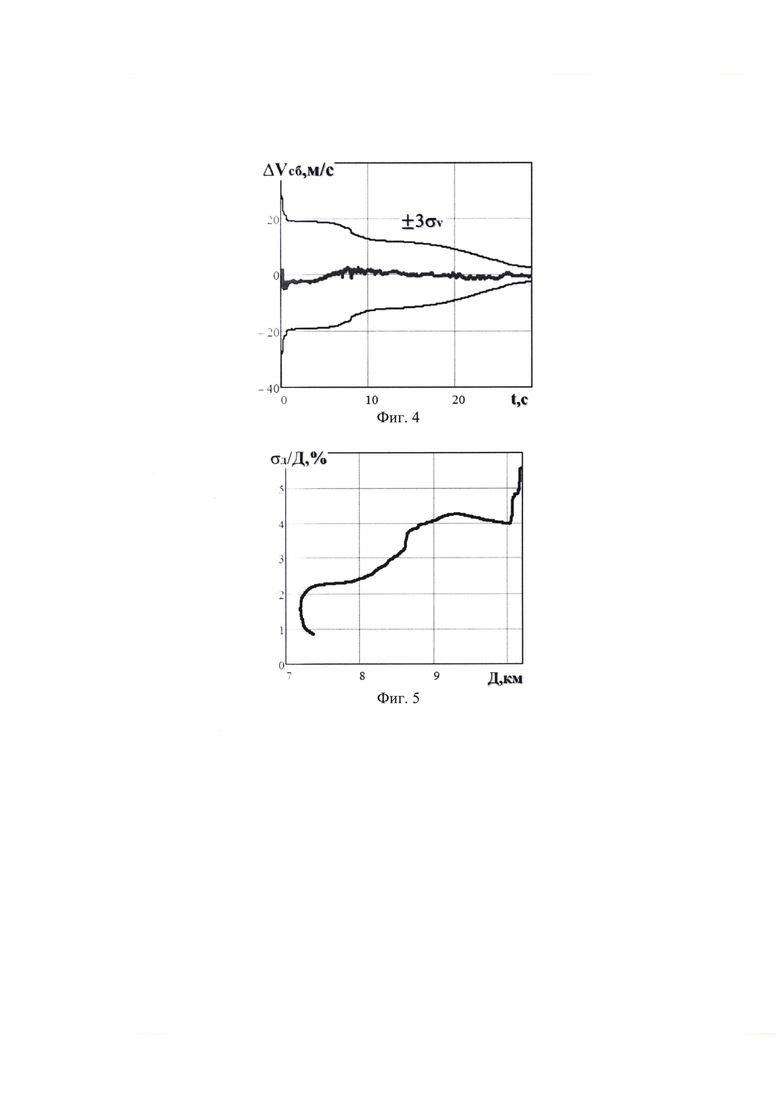
На фиг. 4 представлена временная зависимость ошибки определения скорости сближения с ИРИ предлагаемым способом, а также показан коридор ошибок определения скорости сближения с ИРИ «3 сигма», полученные при моделировании.
На фиг. 5 показана относительная ошибка определения дальности до ИРИ предлагаемым способом в процентах, выраженные отношением среднеквадратической ошибки к дальности, полученная при моделировании.
Предлагаемый способ реализуется следующим образом.
Назначают состав вектора параметров состояния наблюдаемого бортовой аппаратурой РТР ИРИ X=[хири, Vирих, zири, Vириz, fн]T, хири, zири и Vирих, Vириz - координаты и проекции скорости ИРИ в горизонтальной плоскости НЗСК, fн - несущая частота сигналов, излучаемых ИРИ.
Рассчитывают компоненты фундаментальной матрицы Ф(k, k-1) и корреляционной матрицы формирующего шума Dx по формулам Ф(k, k-1)=diag{ϕ, ϕ, 1},


где diag(…) - символ диагональной матрицы,
 - дисперсии проекций ускорения ИРИ и его несущей частоты, задаваемые исходя из априорных сведений о его динамических характеристиках и типе,
- дисперсии проекций ускорения ИРИ и его несущей частоты, задаваемые исходя из априорных сведений о его динамических характеристиках и типе,
Т=tk-tk-1 - интервал дискретизации по времени.
На борту ЛА в tk-e моменты времени измеряют собственные координаты хла(k), yла(k), zла(k) и проекции скорости Vлах(k), Vлау(k), Vлаz(k) в НЗСК. С помощью аппаратуры РТР, размещенной на ЛА, принимают радиосигналы наблюдаемых ИРИ, по которым измеряют их несущую частоту. Измеренное значения несущей частоты принятого сигнала запоминают в виде компоненты вектора наблюдений Z(k)=fпи(k). Дисперсию погрешности измерения несущей частоты принятых сигналов запоминают в виде компоненты корреляционной матрицы шумов измерений 
На первом, предварительном, этапе в момент времени tk-1 назначают компоненты вектора начальных оценок параметров состояния ИРИ  по априорным данным о возможном местоположении ИРИ, максимальной скорости его движения, а также начально измеренной несущей частоте принятого сигнала по формулам
по априорным данным о возможном местоположении ИРИ, максимальной скорости его движения, а также начально измеренной несущей частоте принятого сигнала по формулам



где верхние индексы «min» и «max» в обозначениях координат и проекций скорости указывает на априорно известные минимально и максимально возможные значения соответствующего параметра.
Рассчитывают компоненты корреляционной матрицы начальных ошибок фильтрации R(k-1) по априорным данным о возможном местоположении ИРИ, максимальной скорости его движения, дисперсии погрешности измерений несущей частоты принимаемых сигналов, а также начально измеренной несущей частоте принятого сигнала по формулам
R(k-1)=diag{R1, R2, R3, R4, R5},




где  - градиент нелинейной функции
- градиент нелинейной функции  по вектору начальных оценок
по вектору начальных оценок 
На втором, основном, этапе в момент времени tk рассчитывают вектор текущих оценок параметров состояния ИРИ  по алгоритму дискретной нелинейной фильтрации в последовательности:
по алгоритму дискретной нелинейной фильтрации в последовательности:
расчет вектора экстраполированных оценок параметров состояния ИРИ  в следующий tk момент времени по результатам расчета вектора оценок параметров состояния ИРИ в предыдущий момент времени
в следующий tk момент времени по результатам расчета вектора оценок параметров состояния ИРИ в предыдущий момент времени  по формуле
по формуле

расчет корреляционной матрицы ошибок экстраполяции  по предшествующему значению корреляционной матрицы ошибок фильтрации R(k-1), фундаментальной матрицы Ф(k, k-1) и корреляционной матрицы формирующего шума Dx в соответствии с формулой
по предшествующему значению корреляционной матрицы ошибок фильтрации R(k-1), фундаментальной матрицы Ф(k, k-1) и корреляционной матрицы формирующего шума Dx в соответствии с формулой

расчет вектора экстраполированных наблюдений  на tk-й момент времени по формуле
на tk-й момент времени по формуле

где  и
и  - компоненты вектора экстраполированных оценок параметров состояния ИРИ
- компоненты вектора экстраполированных оценок параметров состояния ИРИ 
расчет вектора  текущих оценок параметров состояния ИРИ по значениям векторов экстраполированных оценок параметров состояния ИРИ
текущих оценок параметров состояния ИРИ по значениям векторов экстраполированных оценок параметров состояния ИРИ  и экстраполированных наблюдений
и экстраполированных наблюдений  в соответствии с формулами
в соответствии с формулами



где K(k) - матрица коэффициентов усиления «невязок»;
Н(k) - матрица линеаризованных связей между измерениями аппаратуры РТР и параметрами состояния ИРИ, 
расчет корреляционной матрицы ошибок фильтрации по формуле

расчет наклонной дальности  до ИРИ и скорости сближения с ним
до ИРИ и скорости сближения с ним  по координатам вектора оценок параметров состояния ИРИ
по координатам вектора оценок параметров состояния ИРИ  измеренным значениям координат ЛА хла(k), yлa(k), zлa(k) и проекций его скорости Vлах(k), Vлау(k), Vлаz(k) по формулам
измеренным значениям координат ЛА хла(k), yлa(k), zлa(k) и проекций его скорости Vлах(k), Vлау(k), Vлаz(k) по формулам



где  и
и  - оценки прямоугольных координат и проекций скорости ИРИ в НЗСК;
- оценки прямоугольных координат и проекций скорости ИРИ в НЗСК;
выдача оценок дальности  и скорости сближения с ИРИ
и скорости сближения с ИРИ  потребителю; запоминание компонент вектора оценок параметров состояния ИРИ
потребителю; запоминание компонент вектора оценок параметров состояния ИРИ  и корреляционной матрицы ошибок фильтрации R(k);
и корреляционной матрицы ошибок фильтрации R(k);
описанный процесс, начиная со второго этапа, повторяют.
В интересах оценки возможности определения координат и параметров движения ИРИ с помощью предлагаемого способа проведено математическое моделирование процесса наблюдения бортовой аппаратурой РТР наземного (надводного) движущегося ИРИ. При этом рассматривалась типовая траектория перемещения ЛА относительно ИРИ, проекция которой на горизонтальную плоскость НЗСК изображена на фиг. 1. Здесь же показана априорная область возможного положения цели с границами 
 и
и 
Соответствующие представленной траектории временные зависимости дальности до ИРИ и скорости сближения с ним изображены на фиг. 2.
Темп обновления измерительной информации в аппаратуре РТР принимался равным Т=10 мс, среднеквадратическая ошибка (СКО) измерения несущей частоты принимаемых сигналов при их длительном когерентном накоплении  где q=20 - минимальное отношение «сигнал-шум» обнаружения сигналов. Ошибки навигационного датчика ЛА не учитывались.
где q=20 - минимальное отношение «сигнал-шум» обнаружения сигналов. Ошибки навигационного датчика ЛА не учитывались.
Результаты моделирования в виде временных зависимостей ошибок определения дальности до ИРИ и скорости сближения с ним изображены на фиг. 3 и 4. Здесь же показаны коридоры ошибок «3 сигма».
На фиг. 5 представлена относительная ошибка определения дальности до ИРИ σд/Д предлагаемым способом, выраженная в процентах, при изменении расстояния от 10,2 до 7,2 км.
Анализ представленных результатов показывает, что предлагаемый способ является работоспособным и обеспечивает определение координат и параметров движения ИРИ, наблюдаемых аппаратурой РТР со слабонаправленной антенной. Так в рассмотренных условиях после 10 с наблюдения ИРИ достигается СКО ошибки определения дальности до него, равное 250 м, и СКО ошибки определения скорости сближения с источником радиоизлучений - 4 м/с. Это соответствует уменьшению априорной неопределенности относительно указанных параметров более, чем в два раза. Относительная ошибка определения дальности до ИРИ на дистанциях менее 9 км не превышает 4%.
Сделанные выводы указывают на достижение цели изобретения.
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений не известен способ определения наклонной дальности до ИРИ и скорости сближения с ним, основанный на измерениях несущей частоты принимаемых аппаратурой РТР сигналов с последующей дискретной нелинейной фильтрацией координат, проекций скорости и несущей частоты ИРИ.
Предлагаемое техническое решение имеет изобретательский уровень, поскольку из опубликованных научных данных и известных технических решений явным образом не следует, что измерение несущей частоты принимаемых аппаратурой РТР сигналов с последующей нелинейной дискретной фильтрацией координат, проекций скорости и несущей частоты наблюдаемого ИРИ обеспечивает определение наклонной дальности до него, а также скорости сближения с ним.
Предлагаемое техническое решение применимо, так как для его реализации могут быть использованы существующие бортовые радиолокационные станции, функционирующие в пассивном режиме, либо бортовые станции непосредственной радиотехнической разведки.
ЛИТЕРАТУРА
1 Патент России 2232402. Способ определения дальности до источников радиоизлучений и скорости сближения с ними в однопозиционных радиолокационных системах.
2 Оценивание дальности и скорости в радиолокационных системах. Ч. 3. / Под ред. B.C. Вербы и М.И. Меркулова. М.: Радиотехника, 2010. 472 с.
3 Мельников Ю.П., Попов С.В. Радиотехническая разведка. Методы оценки эффективности местоопределения источников излучения. М.: «Радиотехника», 2008. 432 с.
4 Патент России 2617830. Способ пассивной однопозиционной угломерно-разностно-доплеровской локации перемещающегося в пространстве радиоизлучающего объекта и радиолокационная система для реализации этого способа.
5 Белов С.Г., Коданев В.Л. Оптимальная фильтрация текущих координат подвижных радиоэлектронных средств. Цифровая обработка сигналов: Научно-методические материалы / Под ред. Е.Ф. Толстова. М.: ВВИА им. проф. Н.Е. Жуковского, 1995.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ И ПАРАМЕТРОВ ДВИЖЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ С ПОМОЩЬЮ ОДНОПОЗИЦИОННОЙ ПАССИВНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2020 |
|
RU2754349C1 |
| СПОСОБ ТРАССОВОГО СОПРОВОЖДЕНИЯ ВОЗДУШНЫХ МАНЕВРИРУЮЩИХ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ ПО ПЕЛЕНГОВОЙ ИНФОРМАЦИИ ОТ ОДНОПОЗИЦИОННОЙ СИСТЕМЫ РАДИОТЕХНИЧЕСКОЙ РАЗВЕДКИ ВОЗДУШНОГО БАЗИРОВАНИЯ | 2017 |
|
RU2660498C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ И СКОРОСТИ СБЛИЖЕНИЯ С НИМИ В ОДНОПОЗИЦИОННЫХ РАДИОЛОКАЦИОННЫХ СИСТЕМАХ | 2002 |
|
RU2232402C2 |
| СПОСОБ БОНДАРЕНКО А.В. ПОЛУЧЕНИЯ РАДИОТЕХНИЧЕСКОЙ ИНФОРМАЦИИ И РАДИОТЕХНИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2599259C1 |
| СПОСОБ ОПТИМАЛЬНОЙ ПРИВЯЗКИ К ПОДВИЖНОЙ НАЗЕМНОЙ ЦЕЛИ И ПРОГНОЗА ЕЁ ПАРАМЕТРОВ НА ОСНОВЕ МОДИФИЦИРОВАННОЙ, ИНВАРИАНТНОЙ К РЕЛЬЕФУ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ УГЛОМЕСТНОЙ ПРОЦЕДУРЫ РАСЧЁТА ДАЛЬНОСТИ | 2016 |
|
RU2617373C1 |
| СПОСОБ ПОЛУЧЕНИЯ РАДИОТЕХНИЧЕСКОЙ ИНФОРМАЦИИ И РАДИОТЕХНИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2562616C1 |
| СПОСОБ ОПТИМАЛЬНОГО ОЦЕНИВАНИЯ ОШИБОК ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ И ЕЁ КОРРЕКЦИИ ПО НЕПОДВИЖНОМУ НАЗЕМНОМУ ОРИЕНТИРУ С ИЗВЕСТНЫМИ ГЕОГРАФИЧЕСКИМИ КООРДИНАТАМИ | 2019 |
|
RU2713582C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ ЗЕМНОЙ ПОВЕРХНОСТИ | 2014 |
|
RU2564552C1 |
| СПОСОБ ОПТИМАЛЬНОЙ ПРИВЯЗКИ К ПОДВИЖНОЙ НАЗЕМНОЙ ЦЕЛИ И ПРОГНОЗА ЕЁ ПАРАМЕТРОВ НА ОСНОВЕ СУБОПТИМАЛЬНОЙ ПРОЦЕДУРЫ УГЛОВОГО СОПРОВОЖДЕНИЯ | 2016 |
|
RU2621374C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ ЗЕМНОЙ ПОВЕРХНОСТИ | 2011 |
|
RU2483324C1 |

Изобретение относится к пассивной радиолокации и может быть использовано для определения координат и параметров движения наземных (надводных) источников радиоизлучений (ИРИ) с помощью аппаратуры радиотехнической разведки (РТР), установленной на борту летательного аппарата (ЛА). Техническим результатом изобретения является обеспечение возможности определения координат и параметров движения наземных (надводных) ИРИ с неизвестными параметрами диаграмм направленности антенн, вне зависимости от режима их работы с помощью бортовой аппаратуры РТР со слабонаправленной малогабаритной антенной системой. Указанный результат достигается измерением в бортовом навигационном датчике ЛА собственных координат и проекций скорости в нормальной земной системе координат (НЗСК), высокоточным измерением в бортовой аппаратуре РТР несущей частоты принимаемых сигналов наблюдаемого ИРИ, дискретной нелинейной фильтрацией вектора параметров состояния ИРИ, включающего его горизонтальные координаты, проекции скорости в НЗСК, а также несущую частоту излучаемых сигналов, преобразованием параметров состояния ИРИ в косвенные оценки дальности до источника радиоизлучений и скорости сближения с ним. 5 ил.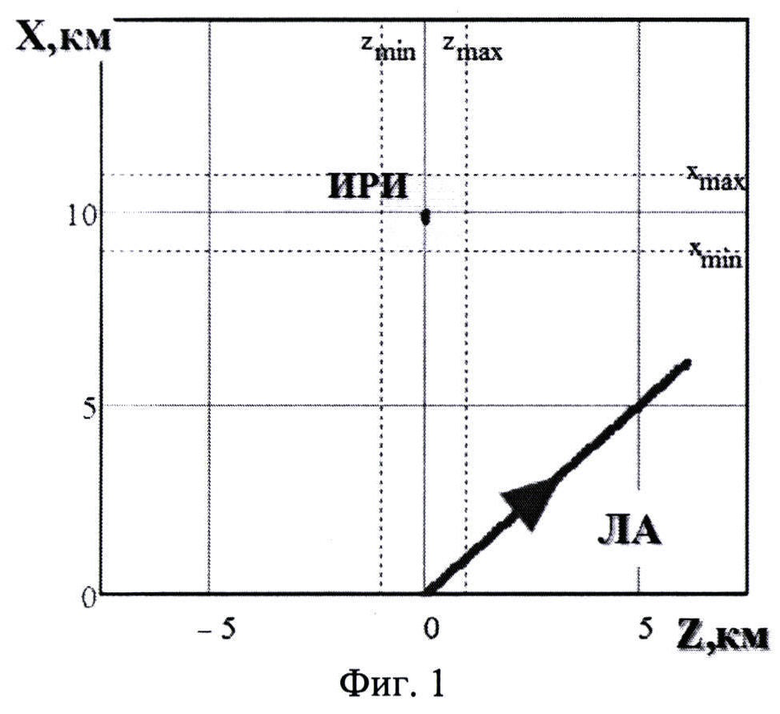
Способ определения координат и параметров движения источников радиоизлучений (ИРИ) по измерениям их несущей частоты включает измерение в tk моменты времени прямоугольных координат хла(k), ула(k), zла(k) летательного аппарата - носителя аппаратуры радиотехнической разведки (РТР) и проекций его скорости Vлах(k), Vлау(k), Vлаz(k) в нормальной земной системе координат (НЗСК); прием аппаратурой РТР радиосигналов от ИРИ и формирование компонент вектора наблюдений Z(k); назначение вектора параметров состояния ИРИ X; расчет компонент переходной матрицы Ф(k, k-1) и корреляционной матрицы формирующих шумов Dx по априорным данным о динамических характеристиках носителя ИРИ и его классе; назначение матрицы шумов наблюдений Dz; на первом этапе в tk-1 момент времени выполняют: назначение начального вектора экстраполированных наблюдений  равным начальному вектору наблюдений Z(k-1); расчет компонентов вектора начальных оценок параметров состояния ИРИ
равным начальному вектору наблюдений Z(k-1); расчет компонентов вектора начальных оценок параметров состояния ИРИ  ; расчет корреляционной матрицы начальных ошибок фильтрации R(k-1); на втором, основном, этапе рассчитывают вектор текущих оценок параметров состояния ИРИ
; расчет корреляционной матрицы начальных ошибок фильтрации R(k-1); на втором, основном, этапе рассчитывают вектор текущих оценок параметров состояния ИРИ  по алгоритму расширенного фильтра Калмана в последовательности: расчет вектора экстраполированных оценок параметров состояния ИРИ
по алгоритму расширенного фильтра Калмана в последовательности: расчет вектора экстраполированных оценок параметров состояния ИРИ  в следующий tk момент времени по результатам расчета вектора оценок параметров состояния ИРИ в предыдущий момент времени
в следующий tk момент времени по результатам расчета вектора оценок параметров состояния ИРИ в предыдущий момент времени  по формуле
по формуле

расчет корреляционной матрицы ошибок экстраполяции  по предшествующему значению корреляционной матрицы ошибок фильтрации R(k-1), фундаментальной матрице Ф(k, k-1) и корреляционной матрице формирующего шума Dx в соответствии с формулой
по предшествующему значению корреляционной матрицы ошибок фильтрации R(k-1), фундаментальной матрице Ф(k, k-1) и корреляционной матрице формирующего шума Dx в соответствии с формулой

расчет вектора экстраполированных наблюдений  на tk-й момент времени; расчет вектора
на tk-й момент времени; расчет вектора  текущих оценок параметров состояния ИРИ по значениям векторов экстраполированных оценок параметров состояния ИРИ
текущих оценок параметров состояния ИРИ по значениям векторов экстраполированных оценок параметров состояния ИРИ  и экстраполированных наблюдений
и экстраполированных наблюдений  в соответствии с формулами
в соответствии с формулами



где K(k) - матрица коэффициентов усиления «невязок»; Н(k) - матрица линеаризованных связей между измерениями аппаратуры РТР и параметрами состояния ИРИ; расчет корреляционной матрицы ошибок фильтрации по формуле

где I - единичная матрица соответствующего размера; расчет наклонной дальности  до ИРИ и скорости сближения с ним
до ИРИ и скорости сближения с ним  по координатам вектора оценок параметров состояния ИРИ
по координатам вектора оценок параметров состояния ИРИ  измеренным значениям координат ЛА хла(k), ула(k), zла(k) и проекций его скорости Vлах(k), Улау(k), Vлaz(k) по формулам
измеренным значениям координат ЛА хла(k), ула(k), zла(k) и проекций его скорости Vлах(k), Улау(k), Vлaz(k) по формулам


где  и
и  - оценки прямоугольных координат и проекций скорости ИРИ в НЗСК; выдача оценок дальности
- оценки прямоугольных координат и проекций скорости ИРИ в НЗСК; выдача оценок дальности  и скорости сближения с ИРИ
и скорости сближения с ИРИ  потребителю; запоминание компонент вектора оценок параметров состояния ИРИ
потребителю; запоминание компонент вектора оценок параметров состояния ИРИ  и корреляционной матрицы ошибок фильтрации R(k); описанный процесс, начиная со второго этапа, повторяют; отличающийся тем, что в результате приема аппаратурой РТР в каждый tk момент времени радиосигнала от ИРИ измеряют его несущую частоту fпи(k), которую запоминают в виде компоненты вектора (скаляра) наблюдений Z(k)=fпи(k);
и корреляционной матрицы ошибок фильтрации R(k); описанный процесс, начиная со второго этапа, повторяют; отличающийся тем, что в результате приема аппаратурой РТР в каждый tk момент времени радиосигнала от ИРИ измеряют его несущую частоту fпи(k), которую запоминают в виде компоненты вектора (скаляра) наблюдений Z(k)=fпи(k);
назначают вектор параметров состояния ИРИ в виде Х=[хири, Vирих, zири,Vириz, fн]T, где хири, zири и Vирих, Vириz - координаты и проекции скорости ИРИ в горизонтальной плоскости НЗСК, fн - несущая частота сигналов, излучаемых ИРИ;
рассчитывают компоненты переходной матрицы Ф(k, k-1) и корреляционной матрицы формирующих шумов Dx, в предположении постоянства несущей частоты ИРИ, по формулам



где diag(…) - символ диагональной матрицы,
 - дисперсии проекций ускорения ИРИ и его несущей частоты, задаваемые исходя из априорных сведений о динамических характеристиках и типе источника радиоизлучений,
- дисперсии проекций ускорения ИРИ и его несущей частоты, задаваемые исходя из априорных сведений о динамических характеристиках и типе источника радиоизлучений,
Т=tk-tk-1 - интервал дискретизации по времени;
назначают матрицу шумов измерений Dz по априорно известной дисперсии погрешности измерения несущей частоты принятых сигналов  в виде
в виде 
на первом этапе назначают компоненты вектора начальных оценок параметров состояния ИРИ  по априорным данным о возможном местоположении ИРИ, максимальной скорости его движения, а также начально измеренной несущей частоте принятого сигнала по формулам
по априорным данным о возможном местоположении ИРИ, максимальной скорости его движения, а также начально измеренной несущей частоте принятого сигнала по формулам



где верхние индексы «min» и «max» в обозначениях координат и проекций скорости указывают на априорно известные минимально и максимально возможные значения соответствующего параметра;
рассчитывают компоненты корреляционной матрицы начальных ошибок фильтрации R(k-1) по априорным данным о возможном местоположении ИРИ, максимальной скорости его движения, дисперсии погрешности измерений несущей частоты принимаемых сигналов, а также начально измеренной несущей частоте принятого сигнала по формулам
R(k-1)=diag{Rl, R2, R3, R4, R5},




где  - градиент нелинейной функции
- градиент нелинейной функции  по вектору начальных оценок
по вектору начальных оценок 
на втором этапе в процессе расчета вектора текущих оценок параметров состояния ИРИ  по алгоритму расширенного фильтра Калмана проводят: расчет компонента вектора (скаляра) экстраполированных наблюдений
по алгоритму расширенного фильтра Калмана проводят: расчет компонента вектора (скаляра) экстраполированных наблюдений  на tk-й момент времени по формуле
на tk-й момент времени по формуле

где  и
и  - компоненты вектора экстраполированных оценок параметров состояния ИРИ
- компоненты вектора экстраполированных оценок параметров состояния ИРИ 
расчет компонентов матрицы Н(k) линеаризованных связей между измерениями аппаратуры РТР и параметрами состояния ИРИ выполняют по формуле

где 
| СПОСОБ ТРАССОВОГО СОПРОВОЖДЕНИЯ ВОЗДУШНЫХ МАНЕВРИРУЮЩИХ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ ПО ПЕЛЕНГОВОЙ ИНФОРМАЦИИ ОТ ОДНОПОЗИЦИОННОЙ СИСТЕМЫ РАДИОТЕХНИЧЕСКОЙ РАЗВЕДКИ ВОЗДУШНОГО БАЗИРОВАНИЯ | 2017 |
|
RU2660498C1 |
| Способ пассивной однопозиционной угломерно-разностно-доплеровской локации перемещающегося в пространстве радиоизлучающего объекта и радиолокационная система для реализации этого способа | 2016 |
|
RU2617830C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ И СКОРОСТИ СБЛИЖЕНИЯ С НИМИ В ОДНОПОЗИЦИОННЫХ РАДИОЛОКАЦИОННЫХ СИСТЕМАХ | 2002 |
|
RU2232402C2 |
| СПОСОБ БОНДАРЕНКО А.В. ПОЛУЧЕНИЯ РАДИОТЕХНИЧЕСКОЙ ИНФОРМАЦИИ И РАДИОТЕХНИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2599259C1 |
| СПОСОБ ОЦЕНКИ ПАРАМЕТРОВ ТРАЕКТОРИИ ОБЪЕКТА | 2016 |
|
RU2610831C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ОБЪЕКТА И СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ЛУЧА ПРИЕМНО-ПЕРЕДАЮЩЕГО АНТЕННОГО УСТРОЙСТВА СИСТЕМЫ СОПРОВОЖДЕНИЯ ОБЪЕКТА | 2011 |
|
RU2476904C1 |
| БЕЛИК Б.В., БЕЛОВ С.Г | |||
| Многоцелевое сопровождение источников радиоизлучения в однопозиционной системе радиомониторинга воздушного базирования // Журнал радиоэлектроники [электронный | |||

