Изобретение относится к области радиотехники, в частности, радиоэлектронным системам измерения параметров движения воздушных судов и может быть использовано в наземных информационно-измерительных системах управления воздушным движением.
Достигаемым техническим результатом изобретения является повышение точности определения дальности до воздушного судна способом весовой обработки информационно-измерительной системой управления воздушным движением с применением третичной обработки радиолокационной информации от двух РЛС.
В информационно-измерительных системах управления воздушным движением с использованием третичной обработки информации оценка дальности до воздушного судна возможна несколькими способами (см. Обработка радиолокационной информации в радиотехнических системах: Уч. пос, Ю.Н. Панасюк, А.П. Пудовкин. Тамбов: издательство ФГБОУ ВО «ТГТУ», 2016. 84 с.). Одним из таких способов является математическое усреднение, которое заключается в нахождении среднего арифметического значений параметров движения от двух РЛС в данный момент времени. В таком случае оценка дальности от двух РЛС определяется согласно выражению:
 (1)
(1)
где  - номер дискрета времени;
- номер дискрета времени;  - значение дальности до воздушного судна, полученное в результате третичной обработки информации;
- значение дальности до воздушного судна, полученное в результате третичной обработки информации;  ,
,  - значения параметров движения воздушного судна, полученное центром управления воздушным движением от РЛС1 и РЛС2 соответственно.
- значения параметров движения воздушного судна, полученное центром управления воздушным движением от РЛС1 и РЛС2 соответственно.
Недостатком способа математического усреднения для оценки информации о дальности от двух РЛС является низкая точность ввиду того, что оценка производится без учета параметров движения воздушного судна и точностных характеристик РЛС системы.
Более сложными в реализации, однако более точными являются способы весовой обработки радиолокационной информации. Оценка дальности ВС по данным от двух РЛС способами весовой обработки производится, основываясь на выражении:
 (2)
(2)
где  ,
,  - значения весового коэффициента оценивания дальности воздушной цели.
- значения весового коэффициента оценивания дальности воздушной цели.
Весовые коэффициенты оказывают влияние на точность третичной обработки информации от РЛС1 и РЛС2.
Известны способы весовой обработки информации, в которых весовые коэффициенты определяются через статические параметры движения воздушного судна. В качестве таких параметров применяются дисперсия невязки, а также дисперсия ошибок измерений, то есть параметры, задаваемые изначально и не изменяющиеся в процессе слежения за воздушным судном. Так, согласно способу (см. Основы теории цифровой обработки радиолокационной информации: Монография, С.З. Кузьмин. М.: издательство «Советское радио», 1974. 423с.), весовые коэффициенты вычисляются с использованием информации о дисперсии ошибок измерения невязки, выраженных через квадрат среднеквадратичных погрешностей σ12 и σ22. отсюда оценка дальности до воздушного судна по информации от двух РЛС производится согласно выражениям:
 (3)
(3)
 (4)
(4)
где  ,
,  - среднеквадратические погрешности параметров движения воздушного судна, переданные от РЛС1 и РЛС2 соответственно; , - значения весового коэффициента оценивания дальности воздушной цели до РЛС1 и РЛС2 соответственно.
- среднеквадратические погрешности параметров движения воздушного судна, переданные от РЛС1 и РЛС2 соответственно; , - значения весового коэффициента оценивания дальности воздушной цели до РЛС1 и РЛС2 соответственно.
Недостатком представленного способа весовой обработки информации является низкая точность оценки дальности до воздушного судна вследствие использования статических параметров (дисперсии ошибок измерения невязки) при определении весовых коэффициентов. Из-за этого весовые коэффициенты остаются постоянными, и не зависят от динамики движения воздушного судна относительно РЛС системы.
Известен способ измерения пространственных координат цели в многопозиционной системе двухкоординатных РЛС (см. патент RU2581706C1, опубл. 20.04.2016). Способ представляет собой весовую обработку данных о высоте воздушного судна в процессе маневрирования, в котором весовые коэффициенты определяются через значения дисперсии ошибок измерения  и
и  . Отсюда высота воздушного судна по результатам третичной обработки информации определяется согласно выражениям:
. Отсюда высота воздушного судна по результатам третичной обработки информации определяется согласно выражениям:
 (5)
(5)
 (6)
(6)
где  - оцененное значение высоты воздушного судна;
- оцененное значение высоты воздушного судна;  ,
,  - значения высоты, полученные от РЛС1 и РЛС2 соответственно;, - значения весового коэффициента оценивания дальности воздушной цели до РЛС1 и РЛС2 соответственно.
- значения высоты, полученные от РЛС1 и РЛС2 соответственно;, - значения весового коэффициента оценивания дальности воздушной цели до РЛС1 и РЛС2 соответственно.
Достоинством данного способа является повышение точности в сравнение со способом математического усреднения и способом весовой обработки с использованием дисперсии невязки воздушного судна.
Недостатком данного способа является невысокая точность оценки параметров движения ВС, поскольку для вычисления весового коэффициента используются статические параметры (дисперсии ошибок измерения), не зависящие от динамики маневрирующего воздушного судна. Весовые коэффициенты для каждой из РЛС остаются постоянным на всем времени оценивания параметров движения воздушного судна, что делает оценку недостаточно точной.
В качестве прототипа выбран способ оценки дальности до маневрирующего воздушного судна информационно-измерительной системой управления воздушным движением с применением третичной обработки информации (см. патент RU 2780803 C1, опубл. 10.04.2022).
В способе оценки дальности до маневрирующего воздушного судна информационно-измерительной системой управления воздушным движением с применением третичной обработки информации на основе наблюдений двух РЛС с известными позициями осуществляется определение координат воздушного судна, передача от каждой РЛС информации о дальности  и
и  до воздушного судна вместе с невязкой калмановской фильтрации
до воздушного судна вместе с невязкой калмановской фильтрации  ,
,  в центр управления воздушным движением, производится третичная обработка информации с определением дальности
в центр управления воздушным движением, производится третичная обработка информации с определением дальности в соответствии с зависимостью:
в соответствии с зависимостью:
 (7)
(7)
где  и
и  - значения весового коэффициента оценивания дальности воздушной цели, которые определяются согласно выражениям:
- значения весового коэффициента оценивания дальности воздушной цели, которые определяются согласно выражениям:
 (8)
(8)
 (9)
(9)
 , (10)
, (10)
где  и
и  - дисперсии невязки по дальности для РЛС1 и РЛС2 соответственно;
- дисперсии невязки по дальности для РЛС1 и РЛС2 соответственно;  - номер дискрета времени;
- номер дискрета времени;  ,
,  - значения невязки по дальности для РЛС1 и РЛС2 соответственно.
- значения невязки по дальности для РЛС1 и РЛС2 соответственно.
Достоинством данного способа является повышение точности определения дальности до воздушного судна способом весовой обработки информационно-измерительной системой управления воздушным движением с применением третичной обработки радиолокационной информации от двух РЛС.
Поскольку в способе-прототипе для вычисления весовых коэффициентов используются постоянные дисперсии невязки и по дальности до РЛС1 и РЛС2 соответственно, то делает оценку недостаточно точной.
Технической задачей способа оценки дальности до маневрирующего воздушного судна информационно-измерительной системой управления воздушным движением с применением третичной обработки информации является повышение точности оценки дальности, используя оценку дисперсий невязки по дальности до РЛС1 и РЛС2  и
и  , и повышение пропускной способности воздушных судов в районе аэродрома, при заданном уровне безопасности полетов.
, и повышение пропускной способности воздушных судов в районе аэродрома, при заданном уровне безопасности полетов.
Поставленная задача решается тем, что в способе оценки дальности до маневрирующего воздушного судна информационно-измерительной системой управления воздушным движением с применением третичной обработки информации на основе наблюдений двух РЛС с известными позициями, заключающийся в определении координат воздушной цели, осуществляется передача от каждой РЛС информации о дальности  и
и  до воздушного судна вместе с невязкой калмановской фильтрации
до воздушного судна вместе с невязкой калмановской фильтрации  и
и  в центр управления воздушным движением, производится третичная обработка информации с определением дальности
в центр управления воздушным движением, производится третичная обработка информации с определением дальности  в соответствии с зависимостью
в соответствии с зависимостью
 (11)
(11)
где  и
и  - значения весового коэффициента оценивания дальности воздушной цели, которые определяются согласно выражениям:
- значения весового коэффициента оценивания дальности воздушной цели, которые определяются согласно выражениям:
;
 (12)
(12)
 (13)
(13)
где  и
и  - дисперсии невязки по дальности до РЛС1 и РЛС2 соответственно;
- дисперсии невязки по дальности до РЛС1 и РЛС2 соответственно;  - номер дискрета времени; , - значение невязки по дальности для РЛС1 и РЛС2 соответственно, отличающийся тем, что осуществляется оценка дисперсии невязки по дальности до РЛС1 и РЛС2 и в соответствии с зависимостями:
- номер дискрета времени; , - значение невязки по дальности для РЛС1 и РЛС2 соответственно, отличающийся тем, что осуществляется оценка дисперсии невязки по дальности до РЛС1 и РЛС2 и в соответствии с зависимостями:
 (14)
(14)
 , (15)
, (15)
где  - матрица наблюдения;
- матрица наблюдения;  ,
,  - ковариационная матрица априорных частных оценок;
- ковариационная матрица априорных частных оценок;  - транспонированная матрица наблюдения;
- транспонированная матрица наблюдения;  и
и  - оценочные значения дисперсий шумов измерений для РЛС1 и РЛС2, которые определяются согласно выражениям:
- оценочные значения дисперсий шумов измерений для РЛС1 и РЛС2, которые определяются согласно выражениям:
 ; (16)
; (16)
 , (17)
, (17)
где  и
и  - значения транспонированной невязки по дальности для РЛС1 и РЛС2;
- значения транспонированной невязки по дальности для РЛС1 и РЛС2;  и
и  - прогнозируемые значения ковариационной матрицы ошибок вектора состояния для РЛС1 и РЛС2; M - количество тактов усреднения в скользящем окне для формирования достаточной статистики;
- прогнозируемые значения ковариационной матрицы ошибок вектора состояния для РЛС1 и РЛС2; M - количество тактов усреднения в скользящем окне для формирования достаточной статистики;  - начальное положение скользящего окна, длина скользящего окна равна 10 отсчетов.
- начальное положение скользящего окна, длина скользящего окна равна 10 отсчетов.
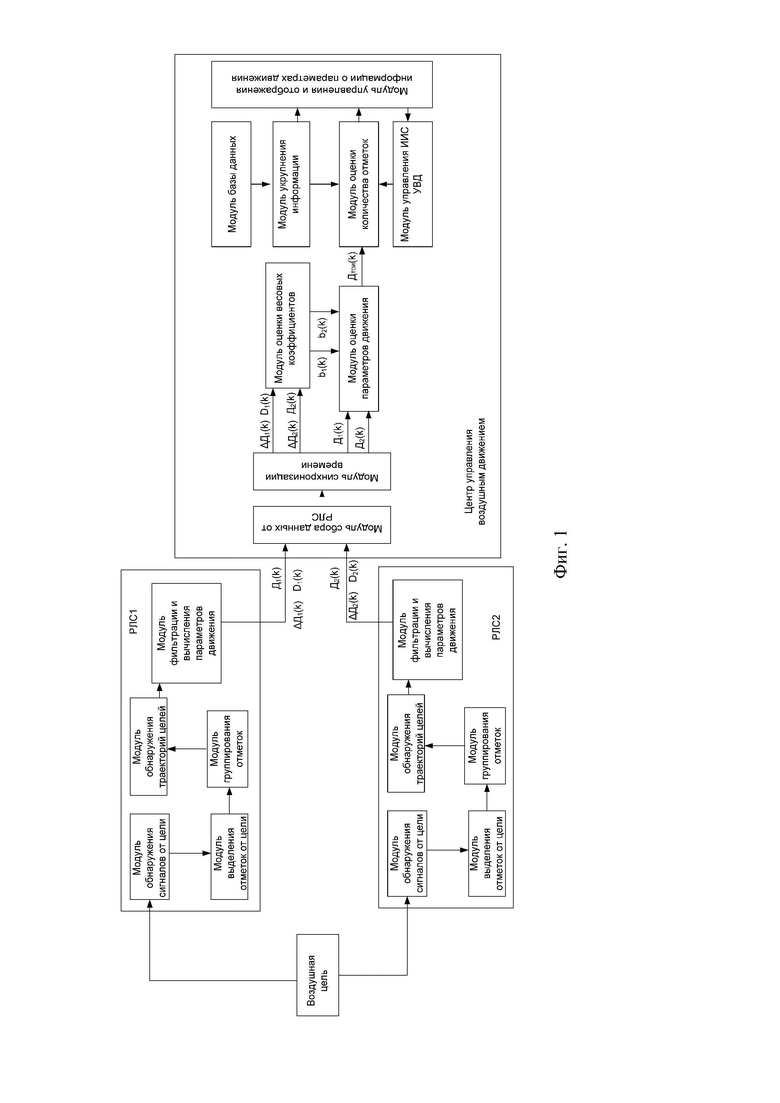
На фиг. 1 представлена структурная схема реализации информационно-измерительной системы управления воздушным движением, в которой может быть реализован предлагаемый способ оценки дальности до маневрирующего воздушного судна информационно-измерительной системой управления воздушным движением с применением третичной обработки информации. Сигнал от воздушного судна поступает в модуль обнаружения сигналов, затем в модуле выделения отметок целей из общей шумовой обстановки выделяют объекты и осуществляется определение мгновенных координат воздушного судна, что является конечным этапом первичной обработки информации, затем результаты первичной обработки информации поступают в модуль группировки отметок, где отметки группируются по целям для дальнейшего формирования траектории движения воздушного судна. Далее в модуле фильтрации и вычисления параметров движения в каждой РЛС производятся вычисления значений дальности и , невязки  и
и  , дисперсии невязки
, дисперсии невязки  и
и  калмановской фильтрации согласно алгоритму:
калмановской фильтрации согласно алгоритму:
 ; (18)
; (18)
 ; (19)
; (19)
 ; (20)
; (20)
 ; (21)
; (21)
 (22)
(22)
 (23)
(23)
 (24)
(24)
 (25)
(25)
 , (26)
, (26)
где  ,
,  ,
,  - оцененные значения дальности до воздушного судна, скорости изменения дальности до воздушного судна и ускорения соответственно;
- оцененные значения дальности до воздушного судна, скорости изменения дальности до воздушного судна и ускорения соответственно;  ,
,  ,
,  - экстраполированные значения дальности до воздушного судна, скорости изменения дальности до воздушного судна и ускорения соответственно;
- экстраполированные значения дальности до воздушного судна, скорости изменения дальности до воздушного судна и ускорения соответственно;  ,
,  ,
,  - коэффициенты усиления невязки по дальности, скорости и ускорения;
- коэффициенты усиления невязки по дальности, скорости и ускорения;  - постоянная времени маневра воздушного судна;
- постоянная времени маневра воздушного судна;  - интервал времени, определяющий маневрирование воздушного судна;
- интервал времени, определяющий маневрирование воздушного судна;  - дисперсия невязки по дальности;
- дисперсия невязки по дальности;  - дисперсия шумов измерений; M - количество тактов усреднения в скользящем окне для формирования достаточной статистики; - начальное положение скользящего окна, длина скользящего окна равна 10 отсчетов;
- дисперсия шумов измерений; M - количество тактов усреднения в скользящем окне для формирования достаточной статистики; - начальное положение скользящего окна, длина скользящего окна равна 10 отсчетов;  - значения невязки по дальности для РЛС;
- значения невязки по дальности для РЛС;  - значения транспонированной невязки по дальности для РЛС; - матрица наблюдения;
- значения транспонированной невязки по дальности для РЛС; - матрица наблюдения;  - транспонированная матрица наблюдения; , - ковариационная матрица априорных частных оценок;
- транспонированная матрица наблюдения; , - ковариационная матрица априорных частных оценок;  - прогнозируемое значение ковариационной матрицы ошибок вектора состояния.
- прогнозируемое значение ковариационной матрицы ошибок вектора состояния.
На этом заканчиваются этапы вторичной обработки информации. Параметры движения воздушного судна, определенные в результате вторичной информации (дальность, невязка и дисперсия калмановской фильтрации), от каждой из двух РЛС передаются в центр управления воздушным движением. В модуле сбора донесений формируются векторы состояния воздушного судна на основе данных двух РЛС, которые затем приводятся к единому времени. С выхода модуля сбора донесений невязки  и
и  , дисперсии невязки по дальности
, дисперсии невязки по дальности  и
и  поступают в модуль оценки весовых коэффициентов. Используя значения невязки по дальности
поступают в модуль оценки весовых коэффициентов. Используя значения невязки по дальности  и
и  , дисперсии невязки по дальности
, дисперсии невязки по дальности  и
и  в модуле оценки весовых коэффициентов вычисляются весовые коэффициенты и , которые поступают вместе с информацией о дальности до воздушного судна
в модуле оценки весовых коэффициентов вычисляются весовые коэффициенты и , которые поступают вместе с информацией о дальности до воздушного судна  и
и  в модуль оценки параметров движения, где происходят этапы отождествления и оценки параметров движения согласно выражению (11).
в модуль оценки параметров движения, где происходят этапы отождествления и оценки параметров движения согласно выражению (11).
Модуль оценки количества отметок проверяет полученные после оценки параметров движения отметки. В случаях, когда их число превышает допустимые нормы работы информационно-измерительной системы управления воздушным движением, информация подвергается укрупнению.
В предлагаемом способе предусмотрены следующие отличия: оценка дальности от двух пространственно-разнесенных РЛС осуществляется способом весовой обработки, в котором весовые коэффициенты (12) и (13) определяются с учетом дисперсий невязки по дальности и согласно выражений (14)-(17), которые вычисляются в модуле фильтрации и вычисления параметров движения в каждой РЛС. Поскольку дисперсии невязки по дальности и зависят от модели состояния и модели наблюдения воздушного судна, а следовательно, от динамики движения воздушного судна при маневрировании и пространственного расположения РЛС относительно маневрирующего воздушного судна, что позволяет повысить точность оценки дальности информационно-измерительной системой управления воздушным движением с третичной обработкой информации.
Реализация предлагаемого способа основана на положениях теории оптимальной фильтрации в системах со случайной скачкообразной структурой (см. Клекис, Э.А. Оптимальная фильтрация в системах со случайной структурой и дискретным временем - Автоматизация и телемеханика, 1987, № 11, с. 61-70) - применение метода оптимальной фильтрации в системах со случайной структурой позволяет определить весовые коэффициенты как минимум двух моделей движения воздушного судна при вторичной обработке сигнала
 (27)
(27)
 , (28)
, (28)
где  - оцененное значение параметра движения воздушного судна методом оптимальной фильтрации;
- оцененное значение параметра движения воздушного судна методом оптимальной фильтрации;  значение частных оценок параметра движения воздушного судна ;
значение частных оценок параметра движения воздушного судна ;  - условия, определяемые различными моделями движения воздушного судна;
- условия, определяемые различными моделями движения воздушного судна;  ,
,  значения апостериорных вероятностей номеров структур системы (веса частных оценок) с учетом различных оценок параметра движения воздушного судна;
значения апостериорных вероятностей номеров структур системы (веса частных оценок) с учетом различных оценок параметра движения воздушного судна;  - интервал времени, определяющий использование той или иной модели движения ВС;
- интервал времени, определяющий использование той или иной модели движения ВС;  - значение дисперсии невязки системы;
- значение дисперсии невязки системы;  - значение невязки системы.
- значение невязки системы.
По условиям моделирования информационно-измерительной системой управления воздушным движением используются идентичные друг другу РЛС, также время начала слежения за воздушным судном и периоды обзора РЛС совпадают, поэтому параметр  не требуется при вычислении.
не требуется при вычислении.
Для определении дальности до воздушного судна по условиям моделирования используется одна модель движения воздушного судна, поэтому информационно-измерительная система управления воздушным движением использует два основных условия: данные, полученные от РЛС1 и РЛС2, отсюда  .
.
Основное условие определения весовых коэффициентов при весовой обработке описывается выражением
 . (29)
. (29)
Также для реализации предлагаемого способа используется теория адаптивной фильтрации (см. Е.П. Великанова, Е.П. Ворошилин. Адаптивная фильтрация координат маневрирующего объекта при изменениях условий передачи в радиолокационном канале - Доклады Томского государственного университета систем управления и радиоэлектроники, 2012. №2-1 (26), с. 29-35). Метод уточнения ковариации по обновляющему процессу. Данный метод основан на идее, что ковариационную матрицу шума наблюдений возможно вычислить по ковариационной матрице невязки:
 , (30)
, (30)
где  - невязка между поступившим измерением и его предсказанным значением;
- невязка между поступившим измерением и его предсказанным значением;
N - количество тактов усреднения в скользящем окне для формирования достаточной статистики;
 - начальное положение скользящего окна;
- начальное положение скользящего окна;
 - предсказанное значение ковариационной матрицы ошибки вектора состояния.
- предсказанное значение ковариационной матрицы ошибки вектора состояния.
С учетом выражений (27-30), оценка дальности при третичной обработке информации, полученной от двух РЛС примет следующий вид:
 (31)
(31)
 (32)
(32)
 (33)
(33)
 (34)
(34)
 (35)
(35)
 (36)
(36)
; (37)
 ; (38)
; (38)
 , (39)
, (39)
где  и
и  - дисперсии невязки по дальности до РЛС1 и РЛС2 соответственно; и - значение невязки по дальности для РЛС1 и РЛС2 соответственно;
- дисперсии невязки по дальности до РЛС1 и РЛС2 соответственно; и - значение невязки по дальности для РЛС1 и РЛС2 соответственно;  и
и  - измеренные значения дальностей для РЛС1 и РЛС2 соответственно;
- измеренные значения дальностей для РЛС1 и РЛС2 соответственно;  и
и  - экстраполированное значение дальности; - матрица наблюдения; - транспонированная матрица наблюдения; , - ковариационная матрица априорных частных оценок; и - дисперсии шумов измерений для РЛС1 и РЛС2; M - количество тактов усреднения в скользящем окне для формирования достаточной статистики; - начальное положение скользящего окна, длина скользящего окна равна 10 отсчетов.; и - прогнозируемые значения ковариационной матрицы ошибок вектора состояния для РЛС1 и РЛС2.
- экстраполированное значение дальности; - матрица наблюдения; - транспонированная матрица наблюдения; , - ковариационная матрица априорных частных оценок; и - дисперсии шумов измерений для РЛС1 и РЛС2; M - количество тактов усреднения в скользящем окне для формирования достаточной статистики; - начальное положение скользящего окна, длина скользящего окна равна 10 отсчетов.; и - прогнозируемые значения ковариационной матрицы ошибок вектора состояния для РЛС1 и РЛС2.
Применение предлагаемого способа для определения дальности до воздушного судна информационно-измерительныой системой управления воздушным движением с применением третичной обработки информации по аналогии с методикой оптимальной фильтрации в системах со случайной структурой основано на получении данных от двух РЛС, кроме значений невязки по дальности и , значения дисперсий невязки по дальности и , которые зависят от динамики движения маневрирующего воздушного судна.
Предлагаемый способ оценки дальности до маневрирующего воздушного судна информационно-измерительной системой управления воздушным движением с применением третичной обработки информации позволяет с большей точностью производить весовую оценку параметров движения воздушного судна информационно-измерительной системой управления воздушным движением в сравнение со способами весовой обработки, не использующими значения значения дисперсий невязки по дальности и .
Применение заявленного способа оценки дальности до маневрирующего воздушного судна информационно-измерительной системой управления воздушным движением с применением третичной обработки информации по сравнению с известными способствует повышению точности определения дальности информационно-измерительных систем управления воздушным движением не менее чем на 15% и повысить пропускную способность воздушных судов в районе аэродрома не менее чем на 10%, при заданном уровне безопасности полетов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ оценки дальности до маневрирующего воздушного судна информационно-измерительной системой управления воздушным движением с применением третичной обработки информации | 2021 |
|
RU2780803C1 |
| Способ и система многоцелевого сопровождения в двухпозиционных радиолокационных системах | 2018 |
|
RU2716495C1 |
| Способ отождествления целевой информации трехкоординатного стабилизированного и двухкоординатного нестабилизированного источников, располагаемых на качающемся носителе | 2023 |
|
RU2816259C1 |
| СПОСОБ И СИСТЕМА СОВМЕСТНОЙ ОБРАБОТКИ ИЗМЕРЕНИЙ ДАЛЬНОСТИ И СКОРОСТИ ДЛЯ МНОГОДИАПАЗОННОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЫ КРУГОВОГО ОБЗОРА | 2014 |
|
RU2572079C2 |
| СПОСОБ ТРАССОВОГО СОПРОВОЖДЕНИЯ ВОЗДУШНЫХ МАНЕВРИРУЮЩИХ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ ПО ПЕЛЕНГОВОЙ ИНФОРМАЦИИ ОТ ОДНОПОЗИЦИОННОЙ СИСТЕМЫ РАДИОТЕХНИЧЕСКОЙ РАЗВЕДКИ ВОЗДУШНОГО БАЗИРОВАНИЯ | 2017 |
|
RU2660498C1 |
| СПОСОБ ЭКСПЕРИМЕНТАЛЬНОЙ ПРОВЕРКИ ИНФОРМАЦИОННЫХ И ИДЕНТИФИКАЦИОННЫХ ВОЗМОЖНОСТЕЙ ДОПЛЕРОВСКИХ ПОРТРЕТОВ ВОЗДУШНЫХ ОБЪЕКТОВ | 2014 |
|
RU2571957C1 |
| СПОСОБ ОТОЖДЕСТВЛЕНИЯ ОТМЕТОК ЦЕЛЕЙ, ПОЛУЧЕННЫХ ДВУМЯ ПРОСТРАНСТВЕННО-СОВМЕЩЕННЫМИ РЛС | 2017 |
|
RU2668214C2 |
| Способ сопровождения крылатой ракеты при огибании рельефа местности в различных тактических ситуациях | 2021 |
|
RU2760951C1 |
| Способ сопровождения воздушной цели из класса "самолёт с турбореактивным двигателем" при воздействии уводящих по дальности и скорости помех | 2018 |
|
RU2665031C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ОБЪЕКТОВ, КОМПЛЕКС РЛС ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 1998 |
|
RU2150716C1 |
Изобретение относится к области радиотехники, в частности к радиоэлектронным системам измерения параметров движения воздушных судов, и может быть использовано в наземных информационно-измерительных системах управления воздушным движением. Техническим результатом является повышение точности оценки дальности и повышение пропускной способности воздушных судов в районе аэродрома при заданном уровне безопасности полетов. Заявленный способ оценки дальности до маневрирующего воздушного судна осуществляют информационно-измерительной системой управления воздушным движением с применением третичной обработки информации на основе наблюдений нескольких РЛС с известными позициями. В способе определяют координаты воздушной цели, передают от каждой РЛС информацию о дальности до воздушного судна вместе с невязками калмановской фильтрации и дисперсиями невязки по дальности в центр управления воздушным движением, где производится третичная обработка информации с целью определения дальности до маневрирующей воздушной цели. 1 ил.
Способ оценки дальности до маневрирующего воздушного судна информационно-измерительной системой управления воздушным движением с применением дисперсии невязки по дальности в третичной обработке информации на основе наблюдений двух радиолокационных станций (РЛС) с известными позициями, заключающийся в поступлении сигнала от воздушного судна на каждую из двух РЛС, осуществлении первичной обработки информации для определения мгновенных координат воздушного судна в каждой РЛС, осуществлении вторичной обработки информации в каждой РЛС, заключающейся в группировании отметок сигнала по целям для формирования траектории движения воздушного судна, вычислении параметров движения воздушного судна: значений дальности от каждой РЛС до воздушного судна, невязки и дисперсии невязки калмановской фильтрации, осуществлении передачи от каждой РЛС информации о параметрах движения воздушного судна в центр управления воздушным движением, где производят третичную обработку информации с определением дальности до маневрирующего воздушного судна, при которой формируют векторы состояния воздушного судна на основе данных двух РЛС, которые затем приводят к единому времени, вычисляют весовые коэффициенты оценивания дальности воздушной цели с учетом дисперсий невязки калмановской фильтрации, отличающийся тем, что определение дальности до маневрирующего воздушного судна осуществляют в соответствии с зависимостью

где  и
и  – значения дальности от каждой РЛС до воздушного судна,
– значения дальности от каждой РЛС до воздушного судна,
 и
и  – значения весового коэффициента оценивания дальности воздушной цели, которые определяются согласно выражениям
– значения весового коэффициента оценивания дальности воздушной цели, которые определяются согласно выражениям
 ;
;


где  – номер дискрета времени;
– номер дискрета времени;
 и
и  – значение невязки по дальности для РЛС1 и РЛС2 соответственно;
– значение невязки по дальности для РЛС1 и РЛС2 соответственно;
 и
и  – дисперсии невязки калмановской фильтрации по дальности до РЛС1 и РЛС2 соответственно, которые зависят от динамики движения воздушного судна при маневрировании и пространственного расположения РЛС относительно маневрирующего воздушного судна, оценку которых осуществляют в соответствии с зависимостями
– дисперсии невязки калмановской фильтрации по дальности до РЛС1 и РЛС2 соответственно, которые зависят от динамики движения воздушного судна при маневрировании и пространственного расположения РЛС относительно маневрирующего воздушного судна, оценку которых осуществляют в соответствии с зависимостями

 ,
,
где  – матрица наблюдения;
– матрица наблюдения;
 ,
,  – ковариационная матрица априорных частных оценок;
– ковариационная матрица априорных частных оценок;
 – транспонированная матрица наблюдения;
– транспонированная матрица наблюдения;
 и
и  – оценочные значения дисперсий шумов измерений для РЛС1 и РЛС2, которые определяются согласно выражениям
– оценочные значения дисперсий шумов измерений для РЛС1 и РЛС2, которые определяются согласно выражениям
 ;
;  ,
,
где  и
и  – значения транспонированной невязки по дальности для РЛС1 и РЛС2;
– значения транспонированной невязки по дальности для РЛС1 и РЛС2;
 и
и  – прогнозируемые значения ковариационной матрицы ошибок вектора состояния для РЛС1 и РЛС2;
– прогнозируемые значения ковариационной матрицы ошибок вектора состояния для РЛС1 и РЛС2;
M – количество тактов усреднения в скользящем окне для формирования достаточной статистики;
 – начальное положение скользящего окна, длина скользящего окна равна 10 отсчетам.
– начальное положение скользящего окна, длина скользящего окна равна 10 отсчетам.
| Способ оценки дальности до маневрирующего воздушного судна информационно-измерительной системой управления воздушным движением с применением третичной обработки информации | 2021 |
|
RU2780803C1 |
| РОГАЧЁВ А.И., СУСТИН А.И., ПАНАСЮК Ю.Н., ПУДОВКИН А.П., ДАНИЛОВ С.Н | |||
| Применение калмановской фильтрации для метода динамических весовых коэффициентов в третичной обработке информации // Вестник ТГТУ | |||
| Станок для придания концам круглых радиаторных трубок шестигранного сечения | 1924 |
|
SU2019A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ очищения сернокислого глинозема от железа | 1920 |
|
SU47A1 |
| Обработка радиолокационной информации в радиотехнических системах: учебное пособие / Ю.Н | |||

