ОБЛАСТЬ ТЕХНИКИ
Предлагаемое изобретение относится к способу третичной обработки радиолокационной информации, который использует формуляры цели, содержащие координаты наблюдаемого объекта, полученные от двух пространственно-совмещенных радиолокационных станций. Достигаемый технический результат - возможность отождествления объектов наблюдения в информационно-управляющей системе, позволяющей ей формировать единую целевую обстановку и измерять координаты цели.
УРОВЕНЬ ТЕХНИКИ
Известны способы отождествления в пространственно-совмещенных системах локации по патентам №2567243 от 2014 г., №2279105 от 2004 г.
В патенте №2567243 отождествление целей достигается путем применения в совмещенных РЛС дополнительной селекции запросного сигнала по пространственным координатам обнаруженной цели.
В патенте №2279105 поставленная задача отождествления решается путем того, что координаты станций задаются в единой земной базисной системе координат, в результате чего появляется избыточное количество алгоритмов локального комплексирования, с помощью которых получают избыточную информацию о параметрах траекторного движения наблюдаемого объекта.
Известны способы отождествления отметок цели в пространственно-совмещенных РЛС как частный случай пространственно-разнесенных пассивных радиоэлектронных станций по работе [Кваснов А.В. Метод отождествления радиоизлучающих целей пространственно-разнесенными пассивными радиоэлектронными станциями на основе t-критерия Стьюдента / Известия высших учебных заведений России. Радиоэлектроника. - СПб.: СПбГЭТУ «ЛЭТИ», - 2016. - №5. - С. 35-41], где признак отождествления формируется за счет особенностей сигналов излучающих станций и его проверке статистическими методами.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Задачей, на решение которой направлено заявленное изобретение, является создание способа отождествления отметок целей, полученных двумя пространственно-совмещенными РЛС различного функционального назначения, находящимися в одной точке приема. Полученная в результате отождествления отметка цели используется для создания единой целевой обстановки в информационно-управляющей системе и позволяет формировать координаты наблюдаемого объекта с более точными характеристиками.
В современных информационно-управляющих системах аппаратура по обнаружению и обработке радиоэлектронной информации (радиолокаторы, оптические станции, теплопеленгаторы и др.) может располагаться в одной точке приема, то есть быть пространственно-совмещенной. Это позволяет данным комплексам формировать единую целевую обстановку с более точными координатами цели, устанавливать радиотехнические особенности наблюдаемых объектов, осуществлять классификацию целей по всем возможным признакам.
Полученные отметки цели каждой из двух РЛС обладают собственными зонами погрешности измерений. Отметки цели передаются в единую информационно-управляющую систему, которая отождествляет отслеживаемую отметку, либо сигнализирует о наблюдении двух раздельных целей (фиг. 1).
Согласно предлагаемому способу каждая из двух РЛС передает формуляр цели в ИУС. В каждом формуляре цели содержится информация о k параметрах цели (дальность до объекта, угловых координатах его расположения и др.). На основании тактико-технических характеристик РЛС каждый из перечисленных параметров обладает собственным среднеквадратическим отклонением (СКО). Таким образом, РЛС1 передает формуляр цели, который содержит вектор измеренных параметров ξ=ξ=(x1 x2 … хk)T и вектор СКО этих параметров σξ=σξ(σξ1 σξ2 … σξk)T. РЛС2 передает формуляр цели, содержащий вектор измеренных параметров η=η(у1 у2 … уk)T и вектор СКО этих параметров ση=ση(ση1 ση2 … σηk)Т
Рассчитывают абсолютную погрешность измерения РЛС1 и РЛС2:
δ=ξ-η=(xl-yl х2-у2 … хk-уk)Т
Вычисляют корреляционную матрицу погрешностей измерений, имеющую вид

По полученным выше данным рассчитывают функционал

Значением этого выражения является число, которое сравнивается с пороговым уровнем, выбранным из таблицы квантилей распределения χ2. На основании сравнения двух чисел выдается команда, которая сигнализирует о двух возможных ситуациях.
Первая ситуация предполагает наблюдение двумя проственно-совмещенными РЛС двух различных целей. В информационно-управляющую систему передаются два формуляра от РЛС1 и РЛС2 соответственно. ИУС отображает две отметки цели на пульте оператора.
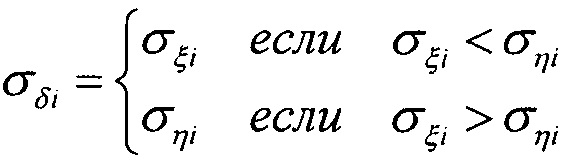
Вторая ситуация предполагает обнаружение единой отметки целей. Полученные формуляры целей от РЛС1 и РЛС2 обрабатываются следующим образом. ИУС создает вектор оценочных значений параметра δ=δ(z1 z2 … zk)T и вектор погрешностей измерений (СКО) σδ=σδ(σδ1 σδ2 … σδk)T.
Вектор оценочных значений формируется на основании соотношения: 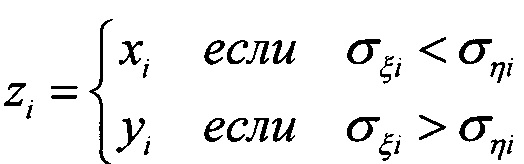
Вектор погрешностей измерения формируется на основании соотношения:
Создается формуляр единой отметки цели РЛС1 и РЛС2. Этот формуляр состоит из оценочных значений искомого параметра (zi) и его погрешностей измерения (σδi). Информационно-управляющая система отображает на пульте оператора одну отметку цели.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
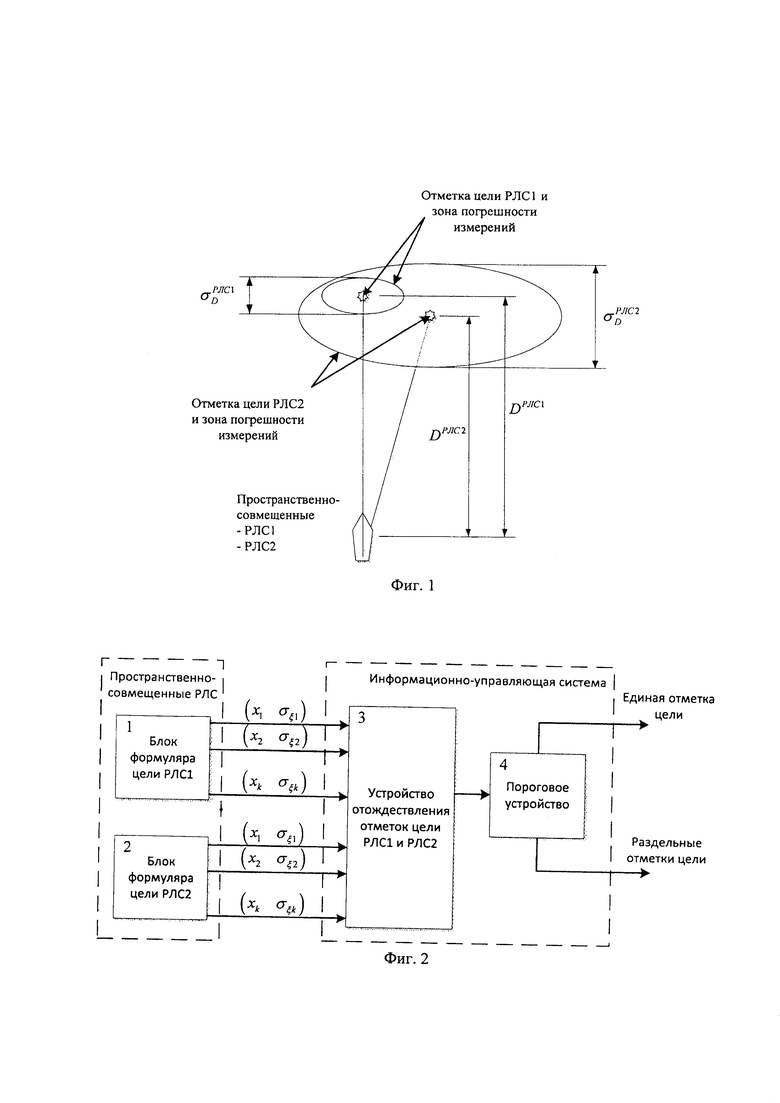
Сущность изобретения поясняется структурной схемой способа отождествления отметок цели от двух пространственно-совмещенных РЛС, представленной в фиг. 2.
Обозначения на структурной схеме:
1 и 2 - блок формуляра цели РЛС1 и РЛС2, содержащие параметры обнаруженных целей (дальность, угловых координатах их расположения и др.);
3 - устройство отождествления отметок цели РЛС1 и РЛС2, осуществляющее процесс расчета функционала;
4 - пороговое устройство, принимающее решение об отождествлении цели или раздельном наблюдении.
Выполненные работы на стенде полунатурного моделирования подтвердили реализуемость указанного способа.
Техническим результатом предлагаемого изобретения является возможность создания многофункциональной информационно-управляющей системы, способной формировать единую целевую воздушную и наземную обстановку, получая информацию от РЛС, имеющих различное целевое назначение и различные характеристики по точности определения параметров цели.
Изобретение направлено на создание способа, который позволяет осуществлять отождествление отметок цели, информация о которой получена двумя пространственно-совмещенными радиолокационными станциями (РЛС) обзора и обнаружения (радиолокаторы, оптические станции и др.). Достигаемый технический результат - создание многофункциональной информационно-управляющей системы (ИУС), формирующей единую целевую воздушную и наземную обстановку. Указанный результат достигается за счет того, что отметки цели от каждой из двух пространственно-совмещенных РЛС передаются в ИУС, где осуществляется процесс их отождествления. В формуляре отметки цели содержится определенное число измеренных параметров (дальность до цели, угловых координатах его расположения и др.). Количество измеряемых параметров каждой РЛС является одинаковым числом. По измеренным данным рассчитывается функционал, который сравнивается с пороговым уровнем, выбираемым из таблицы квантилей распределения χ2 с заданным уровнем значимости. Результатом этого сравнения является решение о наблюдении единственной отметки цели на выбранном направлении или решение об обнаружении двух различных целей. 2 ил.
Способ отождествления отметок целей, полученных от двух пространственно-совмещенных РЛС, заключающийся в том, что в информационно-управляющую систему (ИУС) поступает формуляр цели от каждой из двух РЛС, который содержит вектор измеренных параметров и вектор среднеквадратических отклонений (СКО) этих параметров, в ИУС производят совместную обработку формуляров цели от РЛС1 и РЛС2 путем расчета функционала, содержащего сумму отношений для каждого измеренного параметра, при этом в числителе записывают квадрат разности измерений заданного параметра, принятых от РЛС1 и РЛС2, а в знаменателе - сумму квадратов СКО соответствующих параметров, в результате чего полученное значение функционала сравнивают с пороговым уровнем, выбираемым из таблицы квантилей распределения χ2 с заданным уровнем значимости, на основании сравнения с пороговым уровнем в ИУС принимают решение о наблюдении единой цели для РЛС1 и РЛС2, которую отображают на пульте оператора как одну отметку цели, либо принимают решение об обнаружении самостоятельных целей РЛС1 и РЛС2, которые отображают на пульте оператора в виде двух отметок целей.
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ЦЕЛЕУКАЗАНИЯ | 1995 |
|
RU2096804C1 |
| RU 98106642 A, 20.02.2000 | |||
| СПОСОБ ОТОЖДЕСТВЛЕНИЯ ПЕЛЕНГОВ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ В УГЛОМЕРНЫХ ДВУХПОЗИЦИОННЫХ ПАССИВНЫХ РАДИОЛОКАЦИОННЫХ СИСТЕМАХ | 2004 |
|
RU2253126C1 |
| US 6421007 B, 16.07.2002 | |||
| WO 2006114426 A1, 02.11.2006 | |||
| US 6163297 A, 19.02.2000 | |||
| EP 1601989 A1, 07.12.2005. | |||

