Изобретение относится к области радиолокации и может быть использовано для осуществления трассового сопровождения подвижных маневрирующих источников радиоизлучений (ИРИ) с помощью однопозиционных систем радиотехнической разведки (СРТР).
Автоматическое трассовое сопровождение целей в режиме обзора является одним из основных режимов функционирования современных и перспективных бортовых радиолокационных систем (БРЛС). Здесь под трассовым сопровождением понимается получение оценок декартовых координат и параметров движения цели в масштабе времени, близком к реальному.
Одновременно с развитием техники радиолокации совершенствуются возможности по радиоэлектронному подавлению всех режимов работы БРЛС, поэтому обеспечение надежного функционирования БРЛС в процессе автоматического сопровождения целей при обзоре пространства в условиях воздействия помех различного происхождения - одна из важнейших задач [1].
Одним из наиболее радикальных способов решения задачи помехозащиты является использование пассивных систем радиолокации, к которым относятся СРТР [2]. Особенностью таких систем является невозможность непосредственного измерения пространственных координат и скоростей движения целей, необходимых для решения задач мониторинга, целеуказания и наведения [3]. В этом случае для определения координат и параметров движения цели необходимо использовать способы их косвенного оценивания на основании угломерных данных [2, 4].
В изобретении предлагается новый способ определения координат и параметров движения целей на основании измерений, получаемых СРТР.
В качестве прототипа изобретения был выбран способ сопровождения подвижных ИРИ с использованием расширенного фильтра Калмана [5]. В прототипе использовалась модель прямолинейного равномерного движения, в соответствии с которой вектор состояния ИРИ состоит из декартовых координат ИРИ и компонентов скорости.
Рассмотренный в прототипе способ позволяет осуществлять устойчивое трассовое сопровождение воздушных неманеврирующих ИРИ по измерениям их азимутов и улов места при известных начальных оценках координат состояния ИРИ. Однако для маневрирующих ИРИ этот подход не работает, так как при их маневре возможно множество траекторий, положение ИРИ на которых будет соответствовать одному пеленгу, измеряемому СРТР. Предлагаемым способом решения указанной проблемы является фильтрация координат состояния ИРИ с использованием априорной модели состояния, определяющей постоянство модуля скорости. Указанная модель предполагает, что при маневрировании целей интенсивно меняется направление движения, в то время как модуль скорости меняется достаточно медленно.
Технический результат, который может быть получен от использования предлагаемого изобретения, заключается в возможности осуществлять устойчивое трассовое сопровождение воздушных маневрирующих ИРИ.
Заявленный технический результат, который может быть получен от реализации предлагаемого технического решения, достигается за счет использования алгоритма калмановской фильтрации измерений СРТР, основанного на использовании специальной априорной модели переходов состояния ИРИ, определяющей постоянство модуля скорости ИРИ.
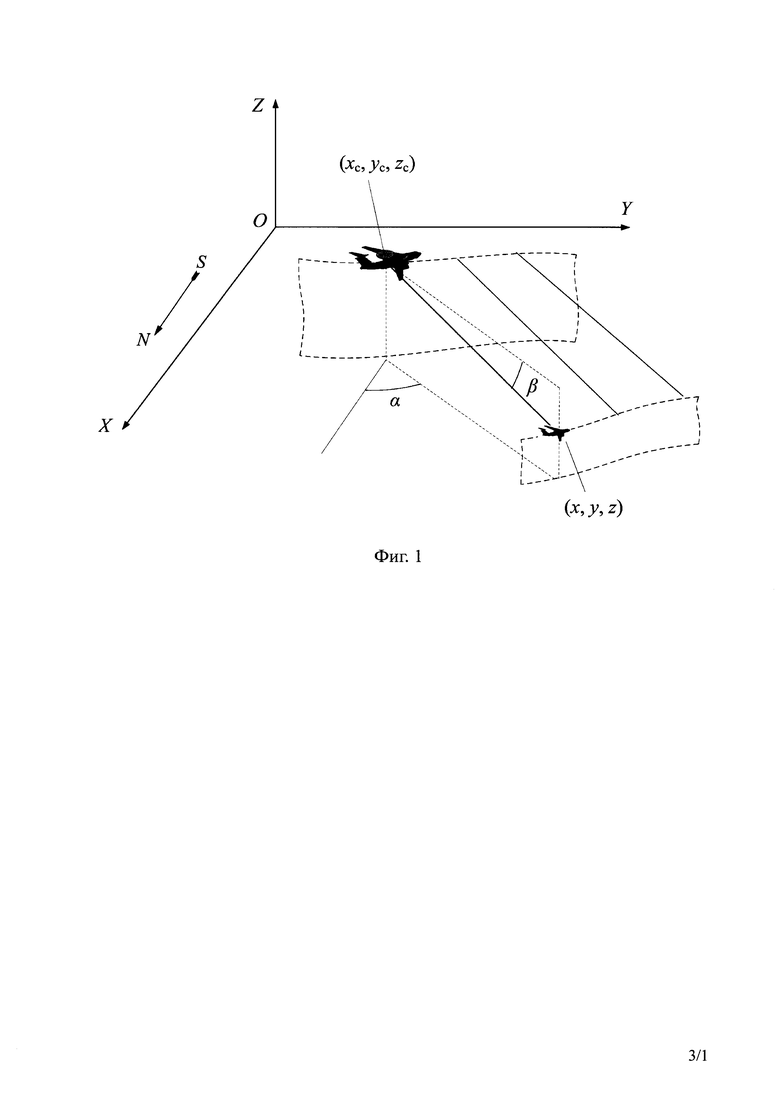
На фигуре 1, иллюстрирующей геометрию решаемой задачи, OXYZ - наземная неподвижная прямоугольная система координат с осью OX, направленной на север.
Положение перемещающейся в пространстве СРТР, размещенной на летательном аппарате, определяется его навигационной системой и задается вектором состояния xc=[xc,yc,zc]T. Местоположение цели определяется вектором состояния x=[x,y,z]T. С выхода СРТР поступают измерения азимута α и угла места β цели, формируемые с учетом данных навигационной системы о положении осей измерительной аппаратуры СРТР.
Сущность предлагаемого изобретения заключается в разработке нового способа трассового сопровождения маневрирующих ИРИ, который состоит в следующем.
На основании измерений от СРТР формируется дискретный случайный процесс, представляющий собой последовательность {zp, z2, …, zk, …} векторов измерений zk. При этом последовательность измерений в моменты времени от первого до k-го будем обозначать:
{Z}k={z1, z2, …, zk},
где вектор zk образуют угломерные измерения СРТР полученные в момент tk:

Модель измерений zk определяется уравнением наблюдения:

где xk - вектор координат состояния ИРИ в момент tk;
xck - вектор координат состояния СРТР в момент tk;
h(tk,xk,xck) - векторная функция полезного сигнала;
ξиk=[ξαk,ξβk]T - дискретный белый шум с нулевым математическим ожиданием и корреляционной матрицей:

где  ,
,  - СКО измерений азимута и угла места ИРИ в момент времени tk.
- СКО измерений азимута и угла места ИРИ в момент времени tk.
Модель состояния представляется в виде


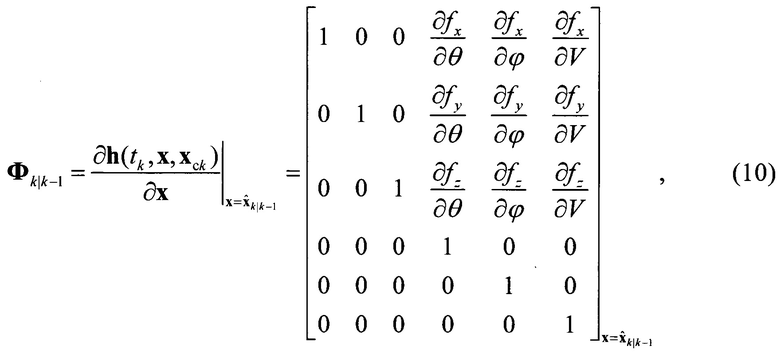
где xk, yk, zk - координаты ИРИ в системе координат OXYZ;
θk - угол между вектором скорости ИРИ и плоскостью OXY;
ϕk - угол между проекцией вектора скорости ИРИ на плоскость OXY и осью OX;
Vk - модуль скорости ИРИ в k-й момент времени.
Δtk|k-1 - интервал между текущим и предыдущим моментами времени;
f(xk-1,Δtk|k-1) - векторная переходная функция, определяемая соотношениями:
ξxk=[ξxk,ξyk,ξzk,ξθk,ξϕk,ξVk]T - вектор белых гауссовских шумов состояния с нулевым математическим ожиданием и корреляционной матрицей Dxk, который определяет возможность маневра.
Разработанная модель (4)-(6) состояния предполагает, что ИРИ может совершать маневр только в горизонтальной плоскости, сохраняя постоянную по модулю скорость. Тогда все компоненты шумов состояния ξxk кроме ξϕk имеют нулевые значения, а корреляционная матрица шумов состояния принимает вид:
где  - модуль максимально возможной угловой скорости курса ИРИ.
- модуль максимально возможной угловой скорости курса ИРИ.
Функция полезного сигнала h(tk,xk,xck) в уравнении наблюдения (2), зависящая от координат местоположения СРТР, для случая векторов наблюдения (1) и состояния (4) имеет вид:
Требуется, опираясь на модель наблюдений (2), (3), (8) и модель состояния (4)-(7), в каждый момент tk оценивать компоненты вектора состояния (4) сопровождаемого ИРИ.
Важно отметить, что при сопровождении подвижных объектов в однопозиционных угломерных системах для соблюдения условий наблюдаемости необходимо наличие достаточно точных начальных оценок координат состояния ИРИ. Таким образом, разработанный алгоритм предполагает, что завязка трассы уже выполнена, и при этом имеются начальные оценки координат состояния ИРИ и дисперсии ошибок этих оценок. Такая ситуация характерна для случая сопровождения постановщиков активных помех, когда существует потенциальная возможность получить от системы активной радиолокации начальные оценки координат состояния цели, прежде чем на ней был задействован постановщик помех.
Так как переходная функция (6) и функция полезного сигнала (8) нелинейны относительно xk, задача оценивания вектора состояния ИРИ формулируется как задача нелинейной дискретной фильтрации. Для ее решения целесообразно использовать расширенный фильтр Калмана, соотношения которого применительно к рассматриваемой задаче оценивания координат состояния ИРИ имеют вид [6]:
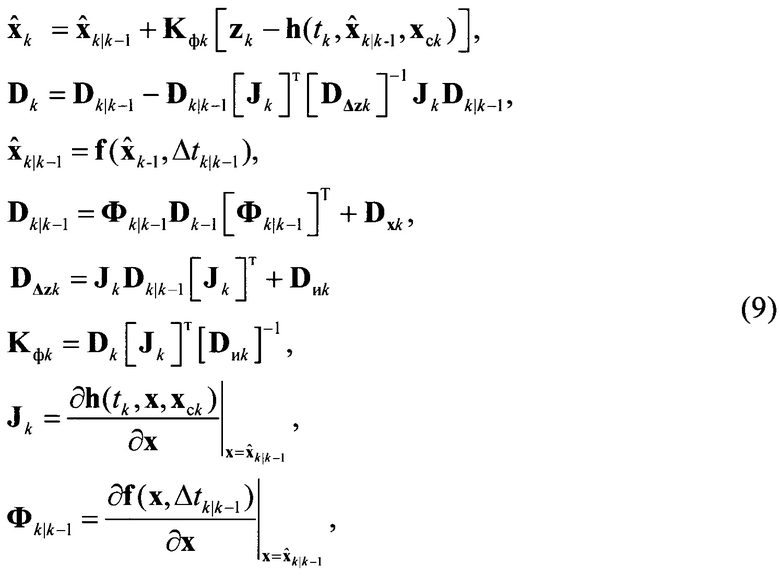
где  и Dk|k-1 - экстраполированные с предыдущего момента tk-1 регистрации на текущий момент tk значения соответственно вектора оценки и матрицы ошибок этой оценки;
и Dk|k-1 - экстраполированные с предыдущего момента tk-1 регистрации на текущий момент tk значения соответственно вектора оценки и матрицы ошибок этой оценки;
Kфk - весовая матрица фильтра в момент tk;
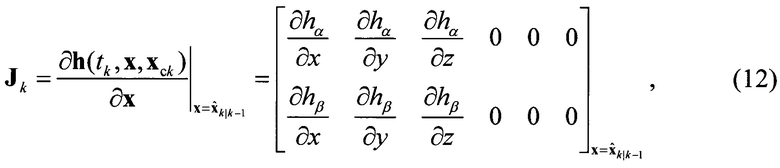
Фk|k-1 и Jk - матрицы производных векторной переходной функции и векторной функции полезного сигнала соответственно, вычисляемые в точке экстраполированной оценки;
DΔzk - корреляционная матрица невязки  зарегистрированного измерения zk относительно измерения, ожидаемого от ИРИ;
зарегистрированного измерения zk относительно измерения, ожидаемого от ИРИ;
Dиk - корреляционная матрица шумов измерений;
Dxk - корреляционная матрица шумов состояния, которая зависит от модели движения ИРИ.
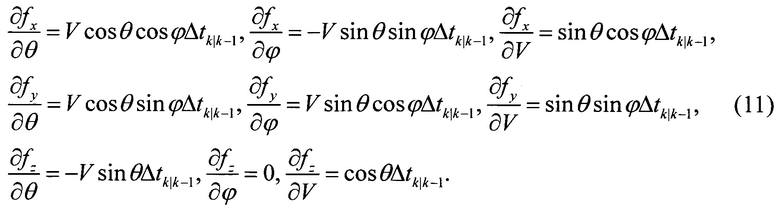
С учетом (4), (6) матрица Фk|k-1 и ее компоненты определяются соотношениями:
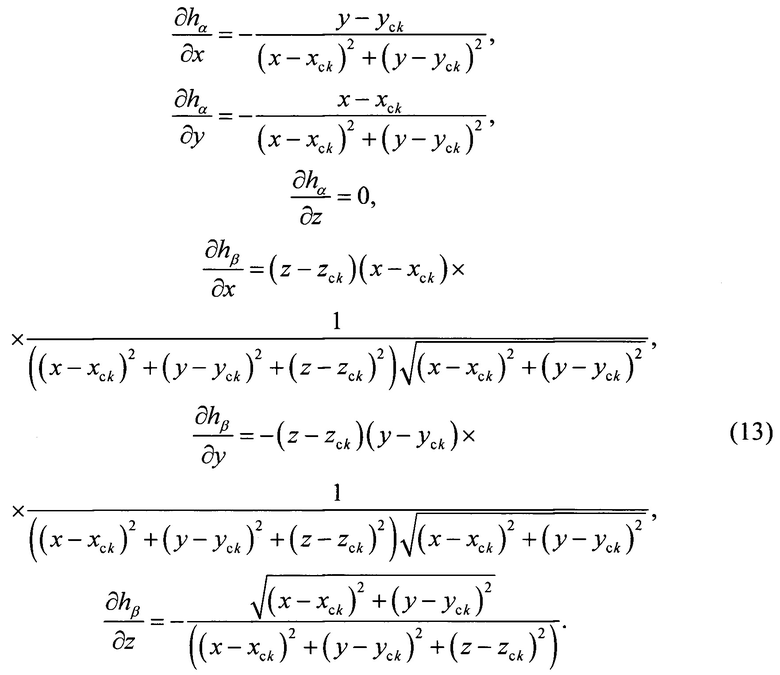
С учетом (4) и (8) матрица Jk и ее компоненты определяются соотношениями:
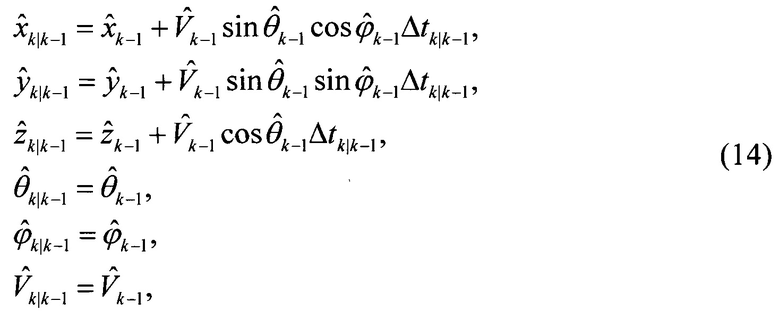
Экстраполированные с предыдущего момента tk-1 регистрации на текущий момент tk значения координат состояния определяются формулами:
Итоговые формулы расчета оценок координат состояния сопровождаемого ИРИ представляются в виде:
где  - компоненты весовой матрица фильтра в момент tk:
- компоненты весовой матрица фильтра в момент tk:
Возможность устойчивого трассового сопровождения воздушных маневрирующих ИРИ с использованием предлагаемого способа исследовалась в процессе имитационного моделирования сопровождения воздушного маневрирующего ИРИ с помощью СРТР воздушного базирования. Имитационная модель включала модели перемещения в пространстве воздушного маневрирующего ИРИ и подвижной СРТР, модель формирования измерений азимутов и углов места ИРИ в аппаратуре СРТР и разработанный алгоритм трассового сопровождения.
При моделировании измерения αk, βk формировались в результате наложения на реальные значения азимутов и углов места ИРИ случайных ошибок, распределенных по гауссовскому закону. При этом предполагалось, что завязка трассы уже была выполнена.
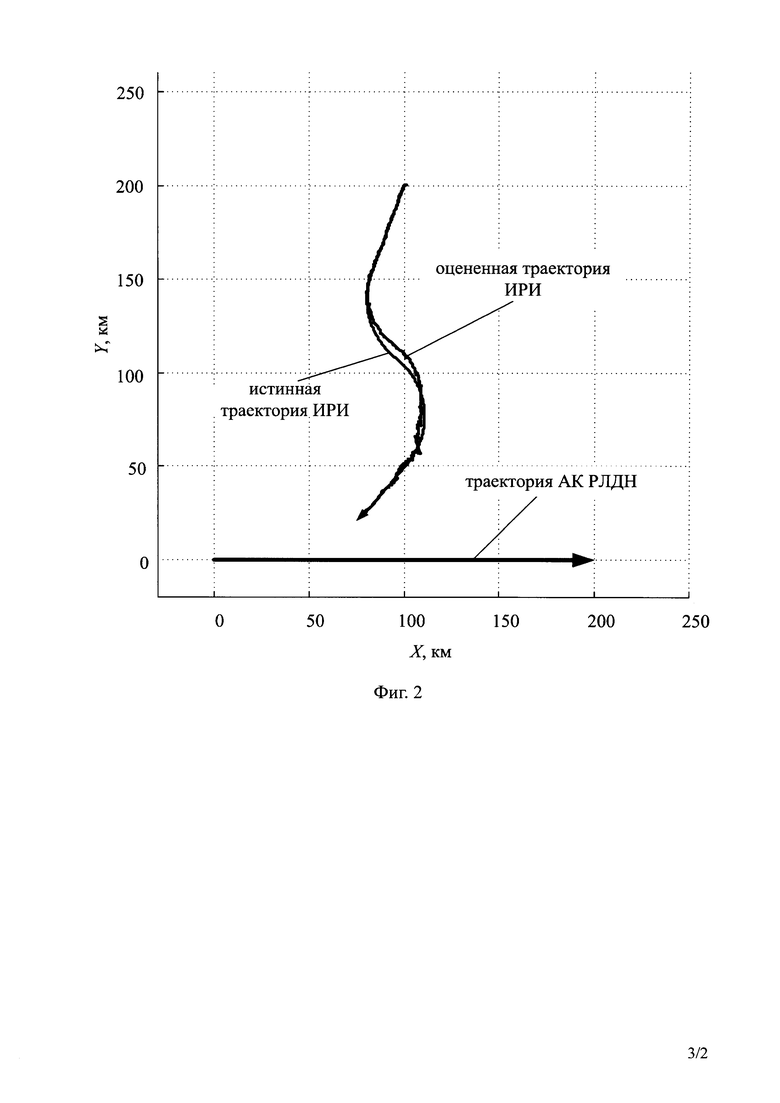
Исследования проводились для различных траекторий СРТР и ИРИ, интервалов поступления измерений и их точностей. На фигуре 2 в качестве примера представлен один из вариантов моделирования работы алгоритма. При моделировании полагалось, что угловые координаты ИРИ измеряются с периодом 5 с, среднеквадратическая ошибка (СКО) измерений составляет 0,2°, СКО начальных оценок координат состояния ИРИ по координатным компонентам составляли 1000 м, по углам ориентации вектора скорости ИРИ - 10°, по модулю скорости - 10 м/с.
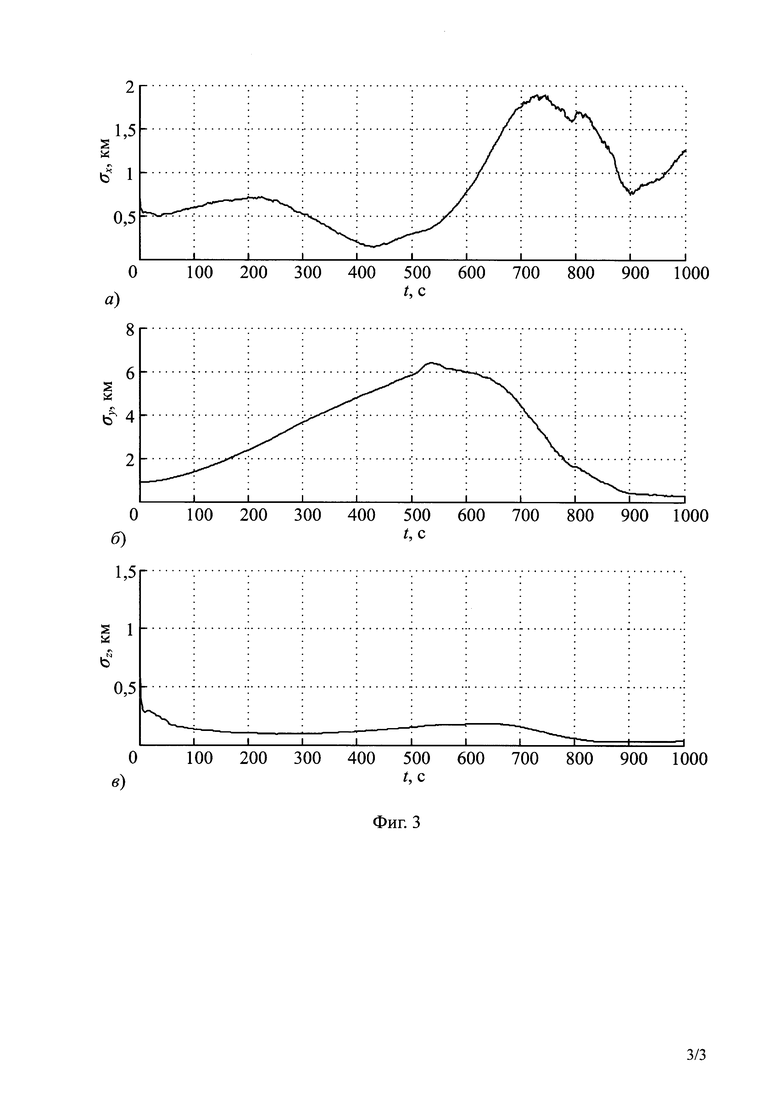
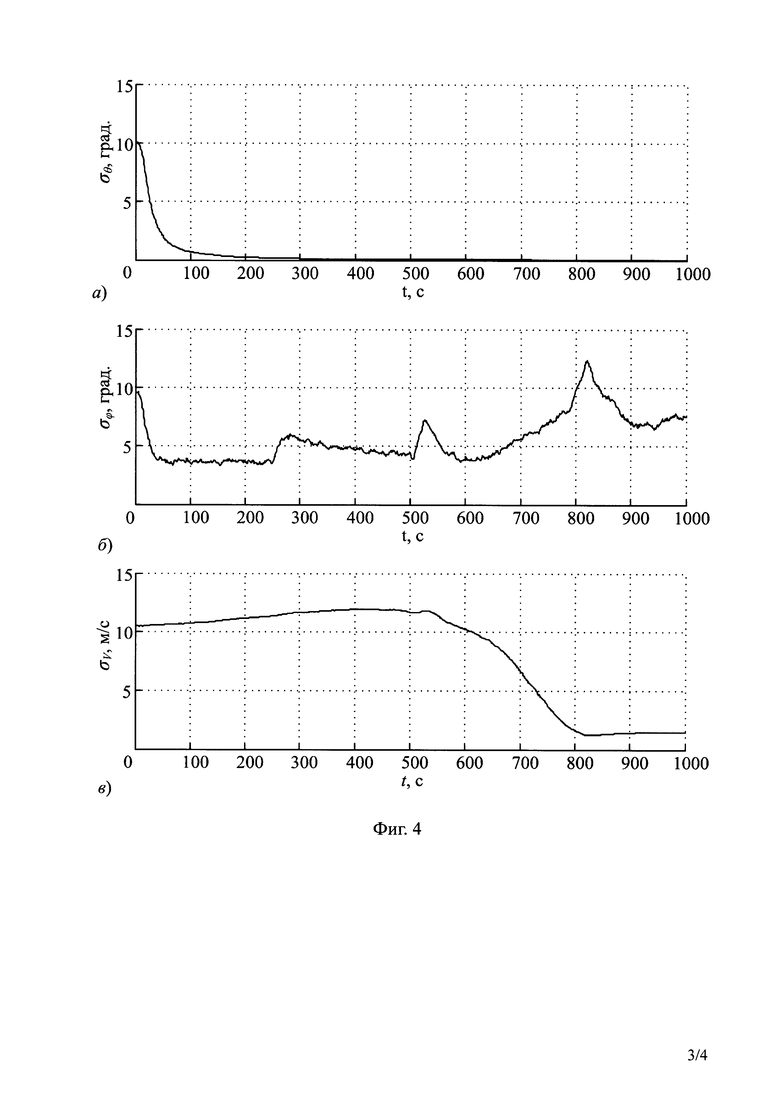
Для рассмотренного случая на фигуре 3 представлены зависимости СКО ошибок оценивания декартовых координат ИРИ от времени, полученные методом статистических испытаний. На фигуре 4, а-б представлены зависимости СКО ошибок оценивания углов ориентации вектора скорости ИРИ в вертикальной и горизонтальной плоскостях соответственно от времени, а на фигуре 4, в - СКО оценивания модуля скорости от времени.
Результаты моделирования подтверждают, что предлагаемый способ в отличие от прототипа позволяет осуществлять устойчивое трассовое сопровождение воздушных маневрирующих ИРИ в реальном масштабе времени.
Предлагаемый способ может быть применен для многоцелевого трассового сопровождения ИРИ при условии предварительной реализации процедуры отождествления поступающих измерений от различных объектов.
Перечень использованных источников
1. Верба B.C. Авиационные комплексы радиолокационного дозора и наведения. Принципы построения, проблемы разработки и особенности функционирования. Монография. - М.: Радиотехника, 2014.
2. Авиационные системы радиоуправления: учебник для военных и гражданских ВУЗов и научно-исследовательских организаций. / В.И. Меркулов, В.С. Чернов, В.А. Гандурин, В.В. Дрогалин, А.Н. Савельев. Под ред. В.И. Меркулова. М.: Изд. ВВИА им. проф. Н.Е. Жуковского. 2008.
3. Меркулов В.И., Дрогалин В.В., Канащенков А.И., Лепин В.Н., Самарин О.Ф., Соловьев А.А. Авиационные системы радиоуправления. Т.2. Радиоэлектронные системы самонаведения. / Под ред. A.И. Канащенкова и В.И. Меркулова - М.: «Радиотехника», 2003.
4. Верба B.C., Меркулов В.И., Дрогалин В.В. и др. Оценивание дальности и скорости в радиолокационных системах. Ч.З. / Под ред. B.C. Вербы и B.И. Меркулова. - М.: Радиотехника. 2010.
5. Белик Б.В., Белов С.Г. Использование калмановской фильтрации для слежения за источниками радиоизлучения в системе радиомониторинга воздушного базирования. // Динамика сложных систем. 2016. №3.
6. Бар-Шалом Я. Траекторная обработка. Принципы, способы и алгоритмы: в 2 ч. / Я. Бар-Шалом, Х.-Р. Ли; [пер. с англ. Д.Д. Дмитриева]. - М.: МГТУ им. Н.Э. Баумана, 2011. - 239 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОЛУЧЕНИЯ РАДИОТЕХНИЧЕСКОЙ ИНФОРМАЦИИ И РАДИОТЕХНИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2562616C1 |
| СПОСОБ БОНДАРЕНКО А.В. ПОЛУЧЕНИЯ РАДИОТЕХНИЧЕСКОЙ ИНФОРМАЦИИ И РАДИОТЕХНИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2599259C1 |
| СПОСОБ АДАПТИВНОГО СОПРОВОЖДЕНИЯ РАДИОЛОКАЦИОННЫХ ЦЕЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2018 |
|
RU2679598C1 |
| СПОСОБ И УСТРОЙСТВО СОПРОВОЖДЕНИЯ МАНЕВРИРУЮЩИХ ЦЕЛЕЙ В ОБЗОРНОЙ ДОПЛЕРОВСКОЙ РЛС | 2023 |
|
RU2815305C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ И СКОРОСТИ СБЛИЖЕНИЯ С НИМИ В ОДНОПОЗИЦИОННЫХ РАДИОЛОКАЦИОННЫХ СИСТЕМАХ | 2002 |
|
RU2232402C2 |
| СПОСОБ СТРОБОВОГО ОТОЖДЕСТВЛЕНИЯ СИГНАЛОВ С ИСТОЧНИКАМИ РАДИОИЗЛУЧЕНИЯ В МНОГОЦЕЛЕВОЙ ОБСТАНОВКЕ | 2014 |
|
RU2557784C1 |
| СПОСОБ ОПТИМАЛЬНОЙ ПРИВЯЗКИ К ПОДВИЖНОЙ НАЗЕМНОЙ ЦЕЛИ И ПРОГНОЗА ЕЁ ПАРАМЕТРОВ НА ОСНОВЕ МОДИФИЦИРОВАННОЙ, ИНВАРИАНТНОЙ К РЕЛЬЕФУ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ УГЛОМЕСТНОЙ ПРОЦЕДУРЫ РАСЧЁТА ДАЛЬНОСТИ | 2016 |
|
RU2617373C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ И ПАРАМЕТРОВ ДВИЖЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ С ПОМОЩЬЮ ОДНОПОЗИЦИОННОЙ ПАССИВНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2020 |
|
RU2754349C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ И ПАРАМЕТРОВ ДВИЖЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ ПО ИЗМЕРЕНИЯМ ИХ НЕСУЩЕЙ ЧАСТОТЫ | 2021 |
|
RU2776078C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ТРАЕКТОРИИ МАНЕВРИРУЮЩЕГО ОБЪЕКТА | 2014 |
|
RU2553459C1 |
Изобретение относится к области радиолокации и может быть использовано для осуществления трассового сопровождения подвижных маневрирующих источников радиоизлучений (ИРИ) с помощью однопозиционных систем радиотехнической разведки (СРТР) воздушного базирования. Достигаемый технический результат – устойчивое трассовое сопровождение воздушных маневрирующих ИРИ. Указанный результат достигается за счет того, что в СРТР измеряют значения азимутов и углов места ИРИ, на основании которых с использованием расширенного фильтра Калмана рассчитываются оценка координат состояния ИРИ и дисперсии ошибок оценивания соответствующих координат, при этом отличительной особенностью способа является используемая модель состояния ИРИ, которая предполагает, что ИРИ может совершать маневр только в горизонтальной плоскости, сохраняя постоянную по модулю скорость. 4 ил.
Способ трассового сопровождения воздушных маневрирующих источников радиоизлучения (ИРИ) по пеленговой информации от однопозиционной системы радиотехнической разведки (СРТР) воздушного базирования, заключающийся в том, что в СРТР, размещенной на летательном аппарате (ЛА), положение которой в пространстве определяют навигационной системой ЛА и задают вектором состояния
где xc,уc,zc - декартовы координаты СРТР,
формируют поток векторов измерений параметров сигналов ИРИ

где zk=[αk,βk]Т - вектор измерений параметров сигналов ИРИ, положение которого в пространстве задают вектором состояния
где x,у,z - декартовы координаты ИРИ,
αk и βk - азимут и угол места ИРИ соответственно, измеренные в момент tk,
используют правило формирования оценок  координат состояния ИРИ и дисперсий Dk ошибок их оценивания на основе расширенного фильтра Калмана
координат состояния ИРИ и дисперсий Dk ошибок их оценивания на основе расширенного фильтра Калмана
где  и
и  - экстраполированные с предыдущего момента tk-1 на текущий момент tk значения соответственно оценки вектора и матрицы ошибок этой оценки;
- экстраполированные с предыдущего момента tk-1 на текущий момент tk значения соответственно оценки вектора и матрицы ошибок этой оценки;
функцию полезного сигнала h(tk,xk,xck) вычисляют по правилу
Kфk - весовая матрица фильтра в момент tk;
 и Jk - матрицы производных векторной переходной функции и векторной функции полезного сигнала соответственно, вычисляемые для экстраполированной оценки вектора состояния;
и Jk - матрицы производных векторной переходной функции и векторной функции полезного сигнала соответственно, вычисляемые для экстраполированной оценки вектора состояния;
DΔzk - корреляционная матрица невязки  зарегистрированного измерения zk относительно измерения, ожидаемого от ИРИ;
зарегистрированного измерения zk относительно измерения, ожидаемого от ИРИ;
Dиk - корреляционная матрица шумов измерений;
Dxk - корреляционная матрица шумов состояния, определяемая моделью движения ИРИ,
отличающийся тем, что вектор состояния ИРИ для фильтра формируют в текущий момент tk по правилу

а модель состояния - по правилу

где xk, уk, zk - декартовы координаты ИРИ;
θk - угол между вектором скорости ИРИ и плоскостью OXY;
ϕk - угол между проекцией вектора скорости ИРИ на плоскость OXY и осью ОХ;
Vk - модуль скорости ИРИ;
 - интервал между текущим и предыдущим моментами времени; векторную переходную функцию
- интервал между текущим и предыдущим моментами времени; векторную переходную функцию  определяют по правилу
определяют по правилу
корреляционную матрицу Dxk вектора ξxk белых гауссовских шумов состояния с нулевым математическим ожиданием формируют по правилу
где  - максимально возможная угловая скорость курса ИРИ, матрицу производных
- максимально возможная угловая скорость курса ИРИ, матрицу производных  векторной переходной функции формируют по правилу
векторной переходной функции формируют по правилу
далее формируют экстраполированные с предыдущего момента tk-1 на текущий момент tk значения координат и параметров по правилам
после чего формируют оценки координат xk, уk, zk и параметров θk, ϕk, Vk по правилам
где  - компоненты весовой матрица фильтра в момент tk:
- компоненты весовой матрица фильтра в момент tk:
затем полученные оценки координат  и параметров
и параметров  передают потребителю.
передают потребителю.
| БЕЛИК Б.В | |||
| и др | |||
| Использование калмановской фильтрации для слежения за источниками радиоизлучения в системе радиомониторинга воздушного базирования | |||
| Динамика сложных систем | |||
| Токарный резец | 1924 |
|
SU2016A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ МАНЕВРИРУЮЩЕГО ОБЪЕКТА | 2001 |
|
RU2196341C1 |
| СПОСОБ УСТРАНЕНИЯ НЕСООТВЕТСТВИЯ ДИНАМИЧНОСТИ ПОДСИСТЕМ В СОСТАВЕ СЛОЖНЫХ ТЕХНИЧЕСКИХ СИСТЕМ И СИСТЕМА ОБЕСПЕЧЕНИЯ БЕССРЫВНОГО СОПРОВОЖДЕНИЯ ИНТЕНСИВНО МАНЕВРИРУЮЩЕЙ ЦЕЛИ | 2015 |
|
RU2617870C2 |
| WO 2005045459 A3, 07.07.2005 | |||
| JP 2010204054 A, 16.09.2010 | |||
| Устройство для разделения проволоки | 1982 |
|
SU1087236A1 |
| US 5289189 A, 22.02.1994. | |||

