Область техники. Изобретение относится к области радиолокации, конкретно к способу измерения угла места (УМ) воздушного объекта (ВО) в метровом диапазоне электромагнитных волн с помощью вертикальной антенной решетки (АР).
Уровень техники. Известны способы измерения УМ воздушного объекта (ВО) с помощью вертикальной АР /RU 2317566, RU 2038607, RU 2307375, RU 2615491, RU 2630686, RU 2649899, RU 2697662, RU 2291464/.
Наиболее близким к заявляемому изобретению относится способ измерения угла места воздушного объекта /RU 2291464/ с помощью вертикальной АР при наличии отражений принимаемого эхосигнала от земной поверхности, выбранный в качестве прототипа изобретения.
Известный способ измерения угла места /RU 2291464/ воздушного объекта, заключается в приеме с помощью вертикальной N-канальной АР прямых и отраженных от подстилающей поверхности Земли массива квадратур  и
и  принятого многоканального радиосигнала от ВО и от предполья АР.
принятого многоканального радиосигнала от ВО и от предполья АР.
Далее в известном способе /RU 2291464/ производят пространственную фильтрацию на основе комплексного сопряжения суммы принятого от цели эхосигнала и его отражения от подстилающей поверхности, модельно приближенной к реальному рельефу земной поверхности позиции – предполья АР. При этом пространственную фильтрацию осуществляют в соответствии с весовыми комплексными коэффициентами, которые определяются с привлечением априорной информации, содержащейся в цифровых картах местности. Численное значение весовых коэффициентов цифровых карт местности пропорционально напряжению, создаваемому на каждом приемном элементе АР волной, отраженной непосредственно от цели и напряжение, создаваемое волной, переотраженной от земной поверхности, учитывающие угол в вертикальной плоскости прихода волны, отраженной непосредственно от цели. Для измерения угла места ВО в /RU 2291464/ используется алгоритм дискретного преобразования Фурье с фиксированным шагом по углу места.
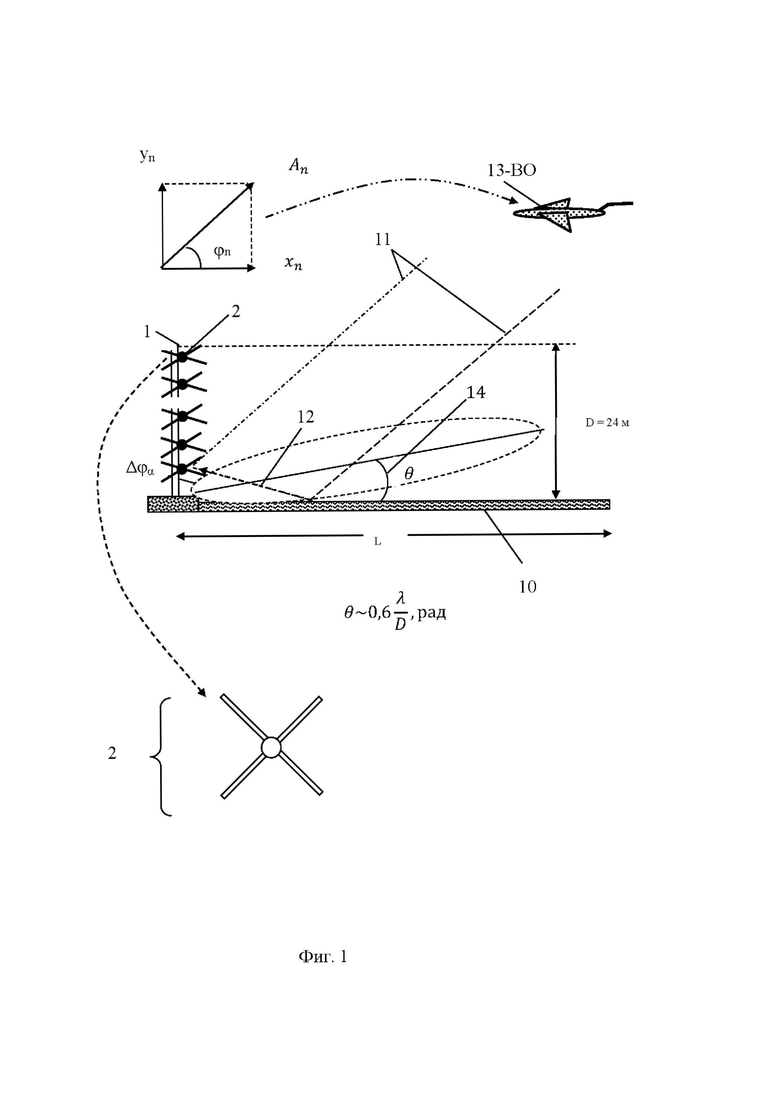
Недостатком известного способа /RU 2291464/ является невозможность измерения УМ целей при предельно малых УМ, в так называемой «зоне нечувствительности» измерения угловых координат ВО даже при наличии ровного предполья. Это связано с тем, что угловой размер θ «зоны нечувствительности» пропорционален ширине диаграммы направленности АР в вертикальной плоскости, и он оценивается:
θ~0,6 λ/D, град, (1)
где:
λ - длина волны, м
D - длина АР, м
В соответствии с выражением (1) численное значение θ «зоны нечувствительности» для прототипа /RU 2291464/ составляет ~ 2 град. Это связано с тем, что в прототипе для измерения угла места ВО используется алгоритм дискретного преобразования Фурье с фиксированным шагом по углу места. С помощью этого алгоритма измерение УМ маловысотных ВО имеет трудности из-за сложной суперпозиции на приемной АР прямых и отраженных от подстилающей поверхности Земли радиосигналов ВО, даже с использованием электронной карты местности.
В конечном итоге, это приводит к неполной компенсации ошибок в «зоне нечувствительности». Решение этой проблемы особенно важно в диапазоне метровых волн.
Технической проблемой, решаемой изобретением, является решение проблемы измерения угловых координат маловысотных ВО в условиях наличия на приемной АР прямых и отраженных от подстилающей поверхности Земли радиосигналов ВО.
Техническим результатом изобретения является решение проблемы измерения угловых координат маловысотных ВО в «зоне их нечувствительности θ» при углах места, сравнимых с шириной диаграммы направленности приемной угломестной АР, а также повышение точности измерений при углах места ВО, превышающих θ град.
Сущность изобретения
Решение указанной технической проблемы и достижения заявленного технического результата обеспечивается тем, что способ измерения угла места воздушного объекта состоит в приеме с помощью вертикальной N-канальной АР многоканального массива квадратур и прямых и отраженных от подстилающей поверхности Земли радиосигналов воздушного объекта (ВО).
Новым в изобретении является следующие отличительные признаки:
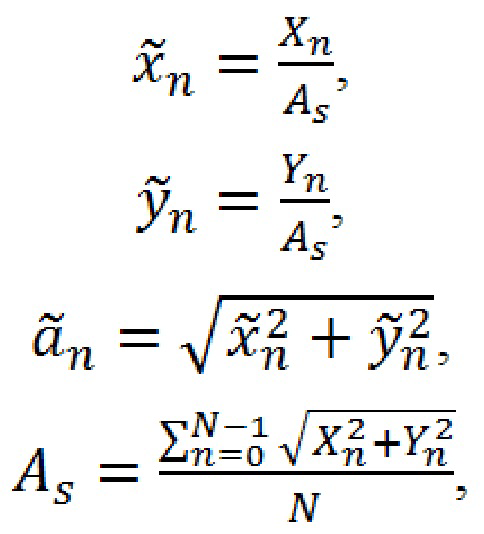
Отличие 1. Принятый многоканальной АР массив квадратур прямого и отраженного от Земли сигналов и , сначала подвергают амплитудной нормировке по N каналам приёмной угломестной АР из условий:
 , (2)
, (2)
 , (3)
, (3)
 , (4)
, (4)
 , (5)
, (5)
где:
 – x-квадратура нормированного реального сигнала;
– x-квадратура нормированного реального сигнала;
 – y-квадратура нормированного реального сигнала;
– y-квадратура нормированного реального сигнала;
 – амплитуда нормированного реального сигнала;
– амплитуда нормированного реального сигнала;
 – средние значение амплитуды сигналов на
– средние значение амплитуды сигналов на  элементах угломестной АР;
элементах угломестной АР;
 – порядковый номер приемного элемента АР;
– порядковый номер приемного элемента АР;
 – общее количество приемных элементов вертикальной АР.
– общее количество приемных элементов вертикальной АР.
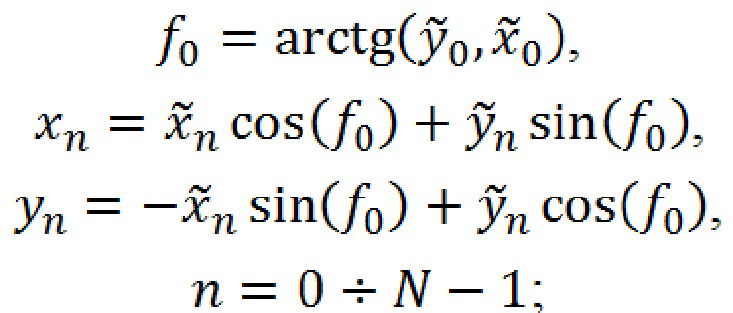
Отличие 2. Одновременно с амплитудной нормировкой реальных принятых многоканальных сигналов проводят их фазовую нормировку относительно фазы сигнала заданного элемента по правилам:
 , (6)
, (6)
 , (7)
, (7)
 , (8)
, (8)
 .
.
Отличие 3. Сравнение нормированного по амплитуде и фазе принятого многоканального реального сигнала проводят с заранее рассчитанными значениями модельного сигнала с заданными коэффициентами ,
,  Френеля отражения предполья АР в заданном диапазоне УМ, с заданным шагом по УМ.
Френеля отражения предполья АР в заданном диапазоне УМ, с заданным шагом по УМ.
Отличие 4. Многоканальный модельный сигнал, характеризующий предполье АР и его  ,
,  амплитудные и фазовые коэффициенты Френеля в зависимости от угла места падающей волны, отраженной от предполья, рассчитывают по правилу:
амплитудные и фазовые коэффициенты Френеля в зависимости от угла места падающей волны, отраженной от предполья, рассчитывают по правилу:
 )), (1)
)), (1)
 )), (2)
)), (2)

 – первая квадратура модельного сигнала;
– первая квадратура модельного сигнала;
 – вторая квадратура модельного сигнала;
– вторая квадратура модельного сигнала;
– номер индекса по антенным элементам;
 – номер индекса по углу места;
– номер индекса по углу места;
 – волновое число, 1/м;
– волновое число, 1/м;
 рабочая частота, МГц;
рабочая частота, МГц;
 – длина волны на рабочей чистоте, м;
– длина волны на рабочей чистоте, м;
 высоты антенных элементов над землей, м;
высоты антенных элементов над землей, м;
d
 принятый размер дискретного шага измерений по УМ, град;
принятый размер дискретного шага измерений по УМ, град;
 ,
,
 амплитудные и фазовые коэффициенты Френеля в зависимости от угла места падающей волны, отраженной от предполья.
амплитудные и фазовые коэффициенты Френеля в зависимости от угла места падающей волны, отраженной от предполья.
 =
=  – дополнительный амплитудный множитель, характеризующий степень неровности поверхности Земли от точки формирования отраженного луча по реальному значению рельефа предполья АР;
– дополнительный амплитудный множитель, характеризующий степень неровности поверхности Земли от точки формирования отраженного луча по реальному значению рельефа предполья АР;
 – данные цифровой карты местности, где b и d азимут и дальность до точки отражения для каждого из лучей, ориентированных по кругу в азимутальной плоскости с угловым шагом 1-2 град, и градуированных по дальности измерения рельефа поверхности с шагом не более 200 м и не менее 50 точек измерений;
– данные цифровой карты местности, где b и d азимут и дальность до точки отражения для каждого из лучей, ориентированных по кругу в азимутальной плоскости с угловым шагом 1-2 град, и градуированных по дальности измерения рельефа поверхности с шагом не более 200 м и не менее 50 точек измерений;
 =
= – дополнительный фазовый множитель, характеризующий расстояние от точки стояния АР до точки формирования отраженного луча;
– дополнительный фазовый множитель, характеризующий расстояние от точки стояния АР до точки формирования отраженного луча;
Отличие 5. Полученные модельные массивы  ,
,  модельных сигналов нормируют по амплитуде с помощью условий:
модельных сигналов нормируют по амплитуде с помощью условий:
 , (11)
, (11)
 , (12)
, (12)
 , (13)
, (13)
 ; (14)
; (14)
Отличие 6. Полученные массивы , модельных сигналов после амплитудной нормировки нормируют по фазе с помощью правил:
 , (15)
, (15)
 , (16)
, (16)
 , (17)
, (17)
 ;
;
Отличие 7. Сравнение нормированные по амплитуде и фазе принятых и модельных многоканальных сигналов проводят по условию их невязки между собой.
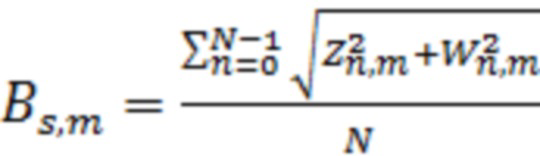
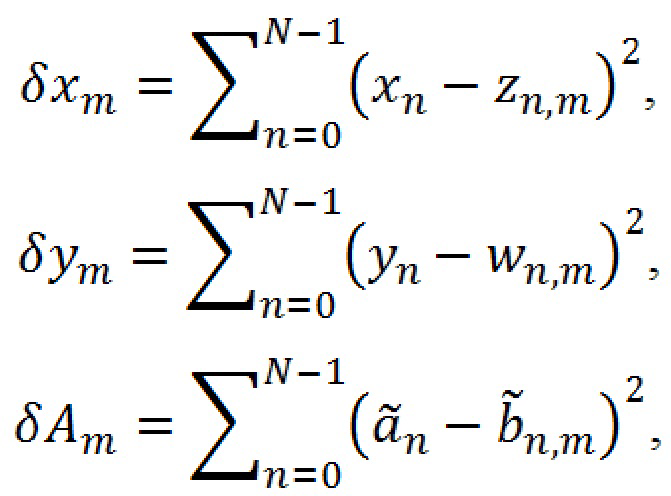
Отличие 8. В качестве критериев невязки используют суммы квадратов «невязок»:  по x-квадратурам»,
по x-квадратурам»,  − по y-квадратурам,
− по y-квадратурам,  − по А-амплитудам, рассчитанные по правилам:
− по А-амплитудам, рассчитанные по правилам:
 , (18)
, (18)
 , (19)
, (19)
 , (20)
, (20)
Отличие 9. Построение по найденным значениям суммы квадратов «невязок»  ,
,  ,
,  нелинейной спектральной функции
нелинейной спектральной функции  по правилу:
по правилу:
 . (21)
. (21)
Отличие 10. На массиве  проводят поиск максимального значения
проводят поиск максимального значения  спектра и его положение по угловой координате принимают за истинное положение угла места ВО по правилу:
спектра и его положение по угловой координате принимают за истинное положение угла места ВО по правилу:
 , (22)
, (22)
d
принятый размер дискретного шага измерений по УМ, град.
Обоснование достижения заявленного технического результата.
Амплитудная нормировка (отличие 1) принятого массива квадратур сигналов  и
и  , многоканального сигнала, принятого одновременно всеми N всеми приемными каналами угломестной АР, относительного амплитуды заданного антенного элемента АР, например, нижнего нулевого элемента, а также одновременная фазовая их нормировка (отличие 2) относительно фазы сигнала соответствующего элемента АР амплитудной нормировки. Это, в свою очередь, позволяет производить адекватную оценку квадратур сигналов, отраженных от ВО и от постилающей поверхности АР на каждом периоде повторения зондирующих сигналов, после сжатия принятого многоканального сигнала по дальности или после суммирования на интервале когерентного накопления.
, многоканального сигнала, принятого одновременно всеми N всеми приемными каналами угломестной АР, относительного амплитуды заданного антенного элемента АР, например, нижнего нулевого элемента, а также одновременная фазовая их нормировка (отличие 2) относительно фазы сигнала соответствующего элемента АР амплитудной нормировки. Это, в свою очередь, позволяет производить адекватную оценку квадратур сигналов, отраженных от ВО и от постилающей поверхности АР на каждом периоде повторения зондирующих сигналов, после сжатия принятого многоканального сигнала по дальности или после суммирования на интервале когерентного накопления.
Сравнение (отличие 3) нормированного по амплитуде и фазе принятого многоканального сигнала с заранее рассчитанными значениями модельного сигнала с заданными коэффициентами отражения Френеля ,  предполья АР в заданном диапазоне УМ, с заданным шагом по УМ позволяют учесть искажения, вносимые предпольем АР, в принятый ей многоканальный сигнал.
предполья АР в заданном диапазоне УМ, с заданным шагом по УМ позволяют учесть искажения, вносимые предпольем АР, в принятый ей многоканальный сигнал.
Расчёт (отличие 4) модельного сигнала с учетом отражающих характеристик предполья АР, включая его , амплитудные и фазовые коэффициенты Френеля, с учетом текущих изменения угла места прямой падающей волны и переотраженной от предполья АР в процессе полета ВО, с учетом размеров антенны и частоты зондирующих сигналов позволяют учесть искажения, вносимые не только предпольем АР, но и траекторией движения ВО и параметрами зондирующего сигнала.
Амплитудная нормировка (отличие 5) и фазовая (отличие 6) модельных сигналов позволяют обеспечить адекватную сравнительную оценку (отличие 7) с соответствующими нормированными значениями принятого многоканального сигнала АР по условию их невязки между собой.
Использование в качестве критериев невязки (отличие 8) суммы квадратов «невязок»: по x-квадратурам», − по y-квадратурам, − по А-амплитудам позволяют сформировать (отличие 9) функцию спектра принятого многоканального сигнала, а также нахождение на спектре максимального значения спектра  (отличие 10), соответствующее точному угломестному местоположения ВО в «зоне θ нечувствительности» АР.
(отличие 10), соответствующее точному угломестному местоположения ВО в «зоне θ нечувствительности» АР.
В целом указанные технические преимущества заявленного изобретения позволяют приобрести возможность измерения угла места в «зоне нечувствительности» способа прототипа /RU 2291464/, а выше этой зоны повысить точность измерения УМ в 3-5 раз по сравнению с прототипом.
Ссылка на чертежи.
Сущность изобретения поясняется чертежами, представленными на фиг.1 - 6.
На фиг. 1 представлен рисунок, поясняющий предлагаемый способ измерения угла места ВО с помощью вертикальной фазированной АР.
На фиг. 2 – функциональная схема устройства, реализующая предлагаемый способ измерения угла места ВО.
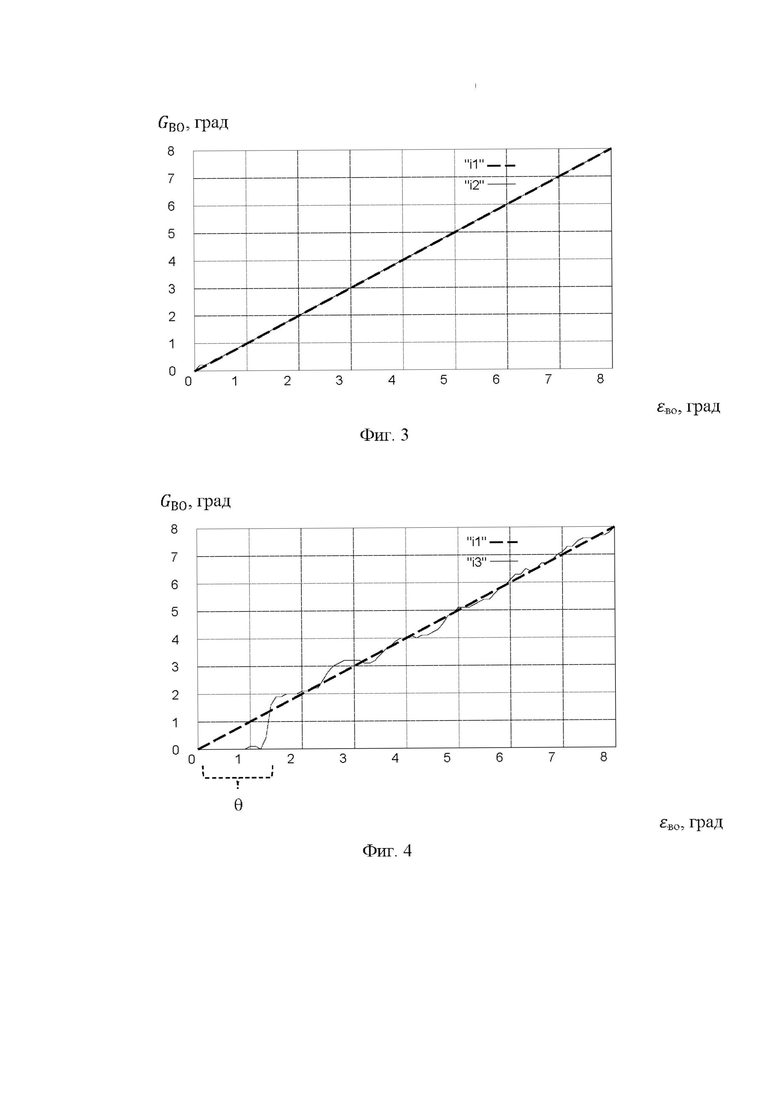
На фиг. 3 – график зависимости измеренных i1 и реальных i2 значений угла места ( ) ВО от углового направления
) ВО от углового направления  во на ВО по предлагаемому способу измерения УМ.
во на ВО по предлагаемому способу измерения УМ.
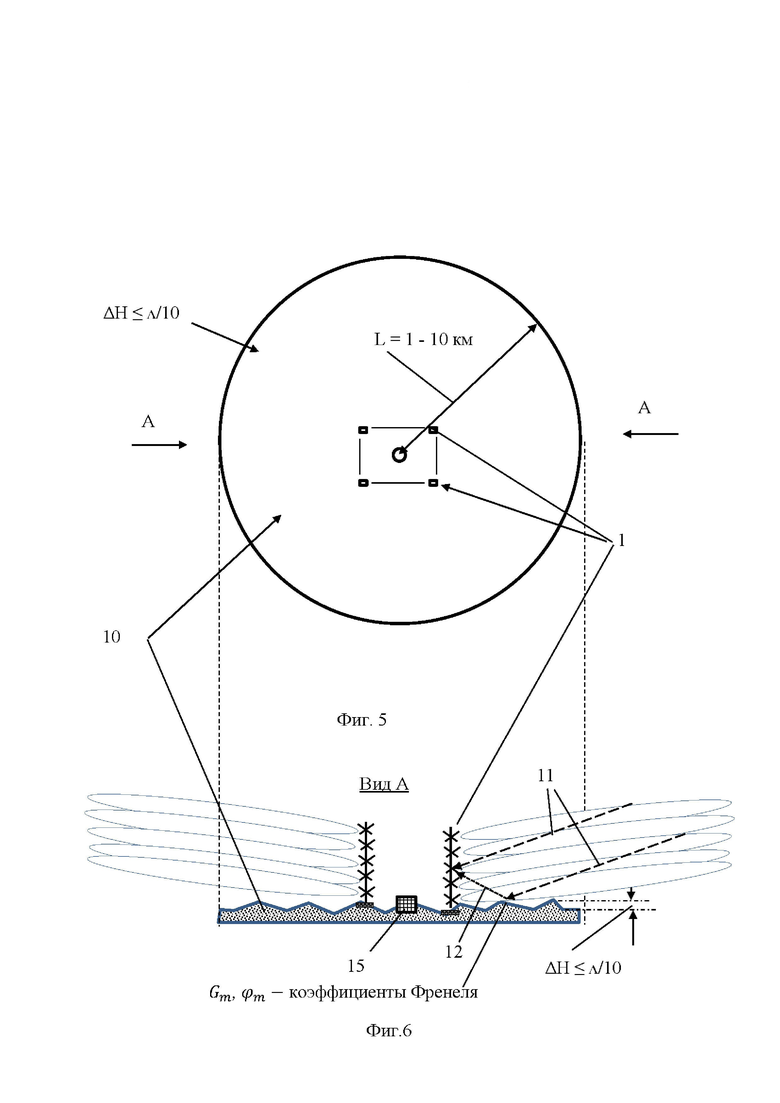
На фиг. 4 – график зависимости измеренных i1, i3 значений угла места () ВО от углового направления во на ВО по предложенному и известному /RU 2291464/ способу измерения УМ соответственно.
На фиг. 5 – рисунок кругового ровного (ΔH ≤ ᴧ/10) предполья приемной позиции радиолокационной станции (РЛС) кругового обзора.
На фиг. 6 – вертикальный разрез, по линии А-А, кругового предполья, представленного на фиг. 4.
На фиг. 1 - 6 обозначены:
1 – вертикальная фазированная антенная решетка (АР);
2 – приемные элементы (полуволновые вибраторы) АР 1;
3 – приемники радиосигналов с цифровым выходом;
4 – блок нормировки принятого сигнала по амплитуде;
5 – блок нормировки сигнала по фазе;
6 – блок расчета и нормировки модельных сигналов  , ;
, ;
7 – блок сравнения нормированных составляющих выборок , и , по критерию их «невязки», построение функции ;
8 – блок поиска максимума функции обратной суммам «невязок»;
9 – блок вычислителя угла места (УМ) воздушного объекта (ВО),  , град;
, град;
10 – предполье перед АР 1 - ровная площадка радиусом не менее 10 км для РЛС метрового диапазона электромагнитных волн;
11 – прямой луч от ВО (между элементами АР 1 разность фаз Δ);
12 – переотраженный от предполья луч ВО;
13 – воздушный объект (ВО);
14 – «зона нечувствительности»;
15 – устройство измерения угловых координат.
Раскрытие сущности изобретения
Изобретение, а именно заявленный способ измерения угловых координат ВО 13 , стал возможен благодаря разработанному авторами методу имитационного моделирования массивов , прямых 11 и переотраженных 12 радиосигналов ВО 13 с характерными для подстилающей поверхности Земли, предполья АР 1, коэффициентами отражения Френеля , в месте расположения АР 1, характеризующими скачок амплитуды и фазы при отражении радиосигнала. Благодаря сравнению массива квадратур принятого сигнала с одним из массивов модельного сигнала - минимальная невязка соответствует искомому УМ. Аналогичная процедура используется для всех ВО.
С учетом описанного выше метода имитационного моделирования массивов  ,
,  с заданными коэффициентами отражения Френеля для ровного предполья 10, представленного на фиг. 5 - 6, перед началом измерений угловых координат ВО, в заданном диапазоне УМ от 0,1 до 80 град, с заданным шагом d = 0,1 - 0,5 угловых градусов по УМ рассчитывают модель многоканального сигнала (далее модельный сигнал) по правилу:
с заданными коэффициентами отражения Френеля для ровного предполья 10, представленного на фиг. 5 - 6, перед началом измерений угловых координат ВО, в заданном диапазоне УМ от 0,1 до 80 град, с заданным шагом d = 0,1 - 0,5 угловых градусов по УМ рассчитывают модель многоканального сигнала (далее модельный сигнал) по правилу:
)), (1)
)), (2)
– первая квадратура модельного сигнала;
– вторая квадратура модельного сигнала;
– номер индекса антенного элемента;
– номер индекса по углу места;
– волновое число, 1/м;
рабочая частота, МГц;
– длина волны на рабочей чистоте, м;
высоты антенных элементов над землей, м;
d
принятый размер дискретного шага измерений по УМ, град;
, амплитудные и фазовые коэффициенты Френеля в зависимости от угла места падающей волны, отраженной от Земли;
= – дополнительный амплитудный множитель, характеризующий степень неровности поверхности Земли от точки формирования отраженного луча по реальному значению рельефа предполья АР;
– данные цифровой карты местности, где b и d азимут и дальность до точки отражения для каждого из лучей, ориентированных по кругу в азимутальной плоскости с угловым шагом 1-2 град, и градуированных по дальности измерения рельефа поверхности с шагом не более 200 м и не менее 50 точек измерений;
= – дополнительный фазовый множитель, характеризующий расстояние от точки стояния АР до точки формирования отраженного луча;
Полученные модельные массивы , нормируют по амплитуде с помощью условий:
 , (3)
, (3)
 , (4)
, (4)
 , (5)
, (5)
. (6)
Затем нормируют по фазе с помощью правил:
, (7)
 , (8)
, (8)
 , (9)
, (9)
.
Сформированные массивы (3 - 9) модельных радиосигналов для предполья АР 10 запоминают и далее используют их при измерении угловых координат ВО 13.
После формирования массивов (3 - 9) модельных радиосигналов в процессе кругового обзора (фиг. 5) 12 воздушного пространства производят прием прямых 11 и отраженных 12 радиосигналов от ВО 13 с помощью вертикальной N-канальной, где N = 8 - 16 приемных элементов 2, антенной решетки (АР) 1 (фиг. 1), высотой 10 - 24 м принимают прямые 11 и отраженные 12 от подстилающей поверхности предполья 10 АР1 радиосигналы воздушного объекта (ВО) 13 (фиг. 1) горизонтальной и вертикальной поляризации.
Далее на основе принятых сигналов измеряют массивы квадратур прямого 11 и отраженного 12 от предполья 10 АР 1. Подвергают их амплитудной нормировке по N каналам приёма из условий:
, (10)
, (11)
, (12)
, (13)
где:
– x-квадратура нормированного реального сигнала;
– y-квадратура нормированного реального сигнала;
– амплитуда нормированного реального сигнала;
 – средние значение амплитуды сигналов на элементах угломестной АР;
– средние значение амплитуды сигналов на элементах угломестной АР;
– порядковый номер приемного элемента АР;
– общее количество приемных элементов вертикальной АР.
Одновременно с амплитудной нормировкой реального сигналов проводят их фазовую нормировку относительно фазы сигнала заданного элемента по правилам:
, (14)
, (15)
, (16)
.
После амплитудной и фазовой нормировки радиосигналов, принятых элементами 2 АР 1 от ВО 13, производят их сравнение (по амплитуде и фазе) с рассчитанными ранее (1 - 2) и нормированными (3 - 9) модельными радиосигналами.
Результаты сравнения сигналов представляют в виде суммы квадратов «невязок»: по x-квадратурам», − по y-квадратурам, − по А- рассчитанные по правилам:
 , (17)
, (17)
 , (18)
, (18)
. (19)
Далее по найденным (17 - 19) значениям суммы квадратов «невязок» , , строят нелинейную спектральную функцию по правилу:
. (20)
После этого на массиве находят максимальное значение спектра , его положение по угловой координате и принимают решение об измеренном угле места ВО по правилу:
, (21),
d
принятый размер дискретного шага измерений по УМ, град.
Вычисленное значение принимают и регистрируют в качестве текущего реального углового положения ВО 13.
Далее после прихода очередной пачки радиосигналов от ВО 13 процесс измерений текущего угла места ВО 13 повторяется в рамках правил (10-21).
Устройство, реализующее предложенный способ УМ.
Для реализации предложенного способа измерения УМ ВО 13 разработано устройство (фиг. 2), реализующее предлагаемый способ измерения угла места ВО 13.
Указанное устройство содержит последовательно соединенные вертикальную фазированную АР 1, включающую двадцать приемных крестообразных элементов (полуволновых вибраторов) 2. АР 1 установлена на площадке с заранее известными отражательными характеристиками и размерами ровного предполья до 10 км. Выходы вибраторов 2 через приемники 3 радиосигналов с цифровым выходом соединены с блоком 4 принятых амплитудных нормировок квадратур сигнала , . Выход блока 4 соединен с блоком 5 амплитудной и фазовой нормировки составляющих массивов и принятых радиосигналов. Выход блока 5 по нормированным сигналам от ВО 13 и переотраженным от предполья 10 соединен с первым входом блока 7 сравнения. Второй вход блока 7 соединен с выходом блока 6 модельных представлений нормированных массивов , модельных выборок прямых 11 и переотраженных 12 радиосигналов ВО. Блок 6 выполнен с возможностью имитации , , характерных для подстилающей поверхности Земли - предполья 10 АР 1, коэффициентами отражения Френеля в месте расположения АР 1 и в диапазоне вероятных УМ с направления ожидаемого налета ВО 13, а также с заданным шагом дискретизации выборок по УМ. Блок 7 выполнен с возможностью сравнения нормированных составляющих выборок , и , по критериям (17 - 19) их «невязки». Выход блока 7 сравнения соединен с входом блока 8 формирования нелинейной спектральной функции , зависящей от «невязок». Блок 8 выполнен в виде вычислителя функции в соответствии с выражением (20). Выход блока 8 соединен с входом вычислителя 9 угла места (УМ) воздушного объекта (ВО). Вычислитель 9 выполнен с возможностью поиска спектральной функции как функции «невязок» и расчета истинного значения изм, град угла места ВО 13 из выражения (21). Измеренное значение угла места ВО 13 изм = (град) является выходом блока 9.
Работа устройства измерения УМ
Предложенное устройство (фиг. 2) по предлагаемому способу измерения угла места ВО работает следующим образом.
Перед началом работы угломестную приемную антенную решетку (АР) радиолокационной станции (РЛС) устанавливают (фиг. 1) на ровной отражающей электромагнитные волны (ЭМВ) площадке с предпольем 10, размерами L, превышающими не менее чем, в 10 раз размеры зоны Френеля для используемой в РЛС рабочей частоты зондирующих импульсов.
Предполье 10 должно соответствовать площадке с шероховатостью на дальности до 1 км ΔН ≤ ᴧ/10 (фиг. 6), на дальности от 1 км до 10 км ΔL = ᴧ/2, где ᴧ - длина ЭМВ ответных сигналов ВО 13, соответствующей их зеркальному отражению от предполья 10.
После установки АР 1 на местности проводят имитационное моделирование на элементах 2 АР 1 модельных нормированных массивов и , прямых 11 и переотраженных 12 радиосигналов от ВО 13 при различных траекториях и высотах его движения.
Формирование массивов , модельных выборок прямых и переотраженных радиосигналов ВО с характерными для подстилающей поверхности Земли - предполья АР 1 производят в соответствии с выражениями (10 - 11) в диапазоне вероятных УМ со всех направлений ВО 13 по азимуту, а также с заданным шагом дискретизации выборок по УМ. Сформированные массивы , вводят в память блока 6 модельных представлений. В случае необходимости проводят контрольный облет зоны ответственности РЛС для подтверждения достоверности сформированных массивов , .
Далее в процессе обслуживания потоков ВО 13 на вход приемных элементов 2 АР 1 поступает прямые 11 и переотраженные 12 от предполья 10 ответные (эхо) радиосигналы ВО. Принятые радиосигналы с элементов 2 поступают на соответствующие радиоприемники 3 с цифровыми выходами. В радиоприемниках 3 радиосигналы 11 и 12 усиливаются, преобразуются в цифровую форму и и передаются в блок 5 амплитудной и фазовой нормировки. В блоке 5 составляющие массивы и нормируются по амплитуде и фазе относительно нижнего элемента 2 АР 1 в соответствии с выражениями (2 - 6). Нормированные массивы и с блока 5 передаются на первый вход блока 7 сравнения, на второй вход которого поступают нормированные массивы , радиосигналов с блока 6 модельных представлений. В блоке 7 производится сравнение массивов и с соответствующими массивами , по критерию их «невязки» в соответствии с выражениями (17 - 19). Результаты сравнения с блока 7 передаются в блок 8 формирования спектральной функции , зависящей от «невязок». В блоке 7 формируется функция в соответствии с выражением (20) и передается в вычислитель 9 угла места ВО 13. В вычислителе 9 производится поиск максимального значения спектральной функции и расчет истинного значения (, град) угла места ВО 13 из выражения (21). Измеренное значение (, град) угла места ВО 13 является выходом блока 9.
Промышленная применимость.
Изобретение разработано на уровне технического проекта и программного оборудования измерения угла места ВО для РЛС. Проведено опытное испытание предложенного способа измерения угловых координат при следующих параметрах антенного оборудования: количество антенных элементов 2 в АР 1 - 20, высота АР 1 - 40 м, рабочая частота 230 МГц, ширина диаграммы направленности (ДН) ~ 2 град. Результаты испытаний предложенного способа измерений угла места ВО 3 представлены на фиг. 3 и сравнение его с известным способом /RU 2291464/ – на фиг. 4.
Результаты испытаний показали, что в диапазоне УМ 0÷8 град использование предложенного способа (изолиния i1 на фиг. 3) ошибки измерений не превысили 0,1 град., а отношение сигнал/шум ~ 15 дБ,
Результаты сравнения результатов измерений i1 и i3 (фиг.4) по предлагаемому и известному /RU 2291464/ способу соответственно, показывают, что предлагаемый способ имеет более высокие точностные характеристики в «зоне θ нечувствительности». В этой зоне θ = 0÷1,5 град известный способ (линия i3 фиг. 4) численное значение угла места воздушного объекта не измеряет ( = 0). В отличие от прототипа /RU 2291464/ у предлагаемого способа (линия i1 фиг. 4) появилась возможность измерения при в «зоне θ нечувствительности» (θ < 2 град). Вне «зоны нечувствительности» θ предложенный способ повышает точность измерения угла места ВО в 3 раз по сравнению с прототипом /RU 2291464/.
По итогам испытаний рекомендуется использование предлагаемого способа измерения угловых координат ВО 13 для стационарных РЛС в диапазоне 30 ÷ 300 МГц.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения угла места воздушного объекта в метровом диапазоне электромагнитных волн | 2019 |
|
RU2717823C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ ДВИЖЕНИЯ НИЗКОЛЕТЯЩИХ ЦЕЛЕЙ | 2017 |
|
RU2667484C1 |
| Способ обнаружения и азимутального пеленгования наземных источников радиоизлучения с летно-подъемного средства | 2020 |
|
RU2732505C1 |
| Способ измерения характеристик направленности излучающей гидроакустической антенны | 2023 |
|
RU2817561C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ УГЛОВЫХ КООРДИНАТ РАДИОСИГНАЛА В АМПЛИТУДНЫХ МОНОИМПУЛЬСНЫХ ПЕЛЕНГАЦИОННЫХ СИСТЕМАХ | 2016 |
|
RU2625349C1 |
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ И ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2419805C1 |
| Способ двухмерного моноимпульсного пеленгования источников радиоизлучений | 2019 |
|
RU2696095C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ПЕРЕСТРОЙКОЙ ЧАСТОТЫ, ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ И ДВУХУРОВНЕВЫМ НЕЙРОСЕТЕВЫМ РАСПОЗНАВАНИЕМ ОБЪЕКТОВ ПО СОВОКУПНОСТИ ПРИЗНАКОВ | 2009 |
|
RU2412451C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПЕЛЕНГОВАНИЯ РАДИОСИГНАЛОВ | 2005 |
|
RU2289146C9 |
| СПОСОБ ПЕЛЕНГАЦИИ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ НА ОДНОЙ ЧАСТОТЕ | 2014 |
|
RU2556699C1 |
Изобретение относится к области радиолокации, конкретно к способу измерения угла места (УМ) воздушного объекта (ВО) в метровом диапазоне электромагнитных волн с помощью вертикальной антенной решетки (АР). Техническим результатом изобретения является повышение точности измерений угловых координат маловысотных ВО в «зоне их нечувствительности θ» при углах места, сравнимых с шириной диаграммы направленности приемной угломестной АР. Способ измерения угла места ВО заключается в приеме с помощью вертикальной N-канальной АР прямых и отраженных от подстилающей поверхности Земли предполья АР радиосигналов ВО, реальных сигналов и массива их квадратур. Перед приемом реальных сигналов формируют массив модельных сигналов, учитывающих размеры АР, поверхность её предполья, данные цифровой карты местности, амплитудные и фазовые коэффициенты Френеля, зависящие от угла места падающей волны и отраженной от Земли. Модельные массивы нормируют по амплитуде и фазе. Затем производят прием и нормировку прямых и отраженных реальных сигналов по N каналам приёмной угломестной АР. Одновременно с амплитудной нормировкой реальных сигналов проводят их фазовую нормировку относительно фазы сигнала заданного элемента АР. Далее производят сравнение нормированного реального сигнала с рассчитанными нормированными значениями модельного сигнала. Далее нормированные модельные массивы сравнивают с нормированным реальным сигналом, принятым АР. В качестве результатов сравнения сигналов выбирают суммы квадратов «невязок»  по x- и y-квадратурам и А-амплитудам соответственно. Далее строят нелинейную спектральную функцию
по x- и y-квадратурам и А-амплитудам соответственно. Далее строят нелинейную спектральную функцию  по правилу
по правилу
после этого на массиве находят максимальное значение спектра  его положение
его положение  по угловой координате и принимают решение об измеренном угле места
по угловой координате и принимают решение об измеренном угле места  по правилу
по правилу  где d – принятый размер дискретного шага измерений по углу места. 6 ил.
где d – принятый размер дискретного шага измерений по углу места. 6 ил.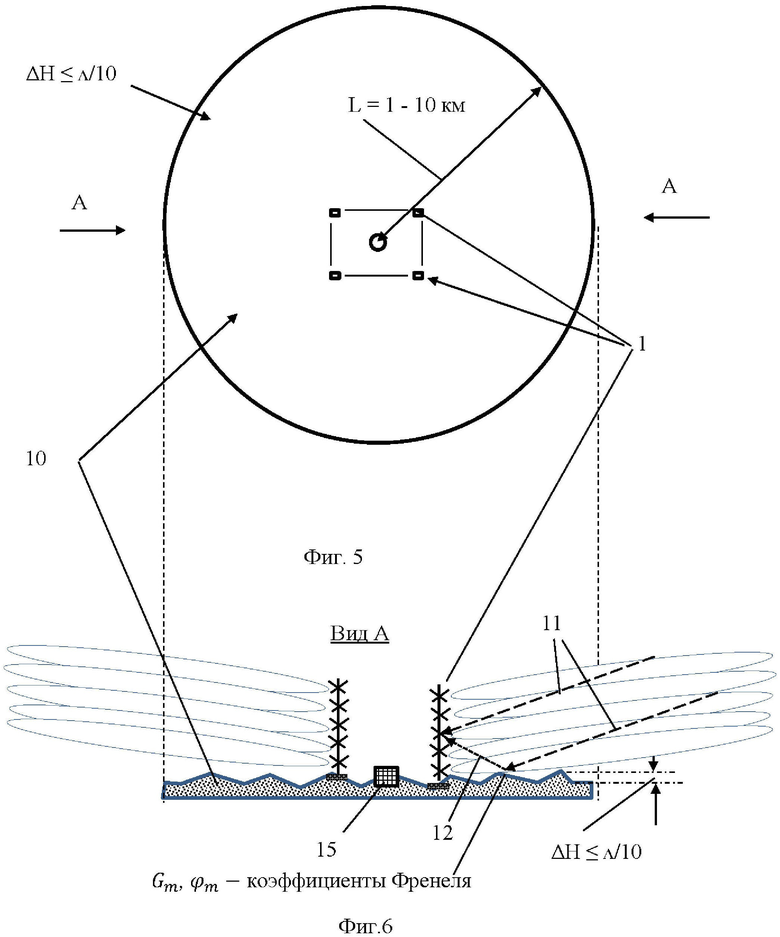
Способ измерения угла места воздушного объекта в метровом диапазоне электромагнитных волн с использованием электронной карты местности, заключающийся в приеме с помощью вертикальной N-канальной антенной решетки (АР) прямых и отраженных от подстилающей поверхности Земли предполья АР радиосигналов воздушного объекта (ВО), далее реальных сигналов, и массива их квадратур  и
и  , отличающийся тем, что перед приемом реальных сигналов формируют массив модельных сигналов, характеризующих поверхность предполья АР по правилу:
, отличающийся тем, что перед приемом реальных сигналов формируют массив модельных сигналов, характеризующих поверхность предполья АР по правилу:

где 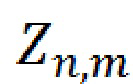 – первая квадратура модельного сигнала;
– первая квадратура модельного сигнала;
 – вторая квадратура модельного сигнала;
– вторая квадратура модельного сигнала;
 – номер индекса по антенным элементам;
– номер индекса по антенным элементам;
 – номер индекса по углу места (УМ);
– номер индекса по углу места (УМ);
 – волновое число, 1/м;
– волновое число, 1/м;
 - рабочая частота, МГц;
- рабочая частота, МГц;
 – длина волны на рабочей чистоте, м;
– длина волны на рабочей чистоте, м;
 - высоты антенных элементов над землей, м;
- высоты антенных элементов над землей, м;
 - принятый размер дискретного шага измерений по УМ, град.;
- принятый размер дискретного шага измерений по УМ, град.;
 - амплитудные и фазовые коэффициенты Френеля в зависимости от угла места падающей волны, отраженной от Земли;
- амплитудные и фазовые коэффициенты Френеля в зависимости от угла места падающей волны, отраженной от Земли;
 – дополнительный амплитудный множитель, характеризующий степень неровности поверхности Земли от точки формирования отраженного луча по реальному значению рельефа предполья АР;
– дополнительный амплитудный множитель, характеризующий степень неровности поверхности Земли от точки формирования отраженного луча по реальному значению рельефа предполья АР;
 – данные цифровой карты местности, где b и d - азимут и дальность до точки отражения для каждого из лучей, ориентированных по кругу в азимутальной плоскости с угловым шагом 1-2 град., и градуированных по дальности измерения рельефа поверхности с шагом не более 200 м и не менее 50 точек измерений;
– данные цифровой карты местности, где b и d - азимут и дальность до точки отражения для каждого из лучей, ориентированных по кругу в азимутальной плоскости с угловым шагом 1-2 град., и градуированных по дальности измерения рельефа поверхности с шагом не более 200 м и не менее 50 точек измерений;
 – дополнительный фазовый множитель, характеризующий расстояние от точки стояния АР до точки формирования отраженного луча;
– дополнительный фазовый множитель, характеризующий расстояние от точки стояния АР до точки формирования отраженного луча;
полученные модельные массивы  нормируют по амплитуде с помощью условий:
нормируют по амплитуде с помощью условий:
затем нормируют по фазе с помощью правил:
после нормировки массива модельных сигналов производят прием и нормировку реальных сигналов прямого и отраженного от Земли сигналов  и
и  по N каналам приёмной угломестной АР из условий:
по N каналам приёмной угломестной АР из условий:
где  – x-квадратура нормированного реального сигнала АР;
– x-квадратура нормированного реального сигнала АР;
 – y-квадратура нормированного реального сигнала;
– y-квадратура нормированного реального сигнала;
 – амплитуда нормированного реального сигнала;
– амплитуда нормированного реального сигнала;
 – средние значение амплитуды сигналов на N элементах угломестной АР;
– средние значение амплитуды сигналов на N элементах угломестной АР;
 – порядковый номер приемного элемента АР;
– порядковый номер приемного элемента АР;
N – общее количество приемных элементов вертикальной АР;
одновременно с амплитудной нормировкой реальных сигналов проводят их фазовую нормировку относительно фазы сигнала заданного, например, нулевого элемента по правилам:
далее производят сравнение принятого и нормированного реального сигнала с рассчитанными заранее и нормированными значениями модельного сигнала с заданными коэффициентами отражения Френеля, в заданном диапазоне УМ и с заданным шагом по УМ,
далее нормированные модельные массивы  сравнивают с нормированным реальным сигналом, принятым АР,
сравнивают с нормированным реальным сигналом, принятым АР,
в качестве результатов сравнения сигналов выбирают суммы квадратов «невязок»:  по x-квадратурам»,
по x-квадратурам»,  по y-квадратурам,
по y-квадратурам,  по А-амплитудам рассчитанные по правилам:
по А-амплитудам рассчитанные по правилам:
далее по найденным значениям суммы квадратов «невязок»  строят нелинейную спектральную функцию
строят нелинейную спектральную функцию  по правилу
по правилу
после этого на массиве находят максимальное значение спектра  , его положение
, его положение  по угловой координате и принимают решение об измеренном угле места
по угловой координате и принимают решение об измеренном угле места  по правилу
по правилу

где d – принятый размер дискретного шага измерений по УМ, град.
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ ДВИЖЕНИЯ НИЗКОЛЕТЯЩИХ ЦЕЛЕЙ | 2017 |
|
RU2667484C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА МЕСТА ЦЕЛЕЙ ПРИ НАЛИЧИИ ОТРАЖЕНИЙ ПРИНИМАЕМОГО ЭХОСИГНАЛА ОТ ЗЕМНОЙ ПОВЕРХНОСТИ И ИМПУЛЬСНАЯ НАЗЕМНАЯ ТРЕХКООРДИНАТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2291464C2 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА МЕСТА МАЛОВЫСОТНЫХ ЦЕЛЕЙ | 1992 |
|
RU2038607C1 |
| Способ измерения угла места (высоты) низколетящих целей под малыми углами места в радиолокаторах кругового обзора при наличии мешающих отражений от подстилающей поверхности | 2016 |
|
RU2630686C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА МЕСТА НИЗКОЛЕТЯЩЕЙ ЦЕЛИ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2307375C1 |
| CN 105785337 A, 20.07.2016 | |||
| CN 103293526 A, 11.09.2013 | |||
| US 3778824 A, 11.12.1973 | |||
| Способ разведки рудных ископаемых | 1941 |
|
SU73253A1 |

