Изобретение относится к области радиолокации и может быть использовано для распознавания в импульсно-доплеровской радиолокационной станции (РЛС) различных типов воздушной цели из класса «Самолет с турбореактивным двигателем (ТРД)» при стационарных условиях ее полета на основе нейронной сети.
Известен способ распознавания типа самолета из класса «самолет с ТРД» в импульсно-доплеровской РЛС, заключающийся в том, что радиолокационный (РЛ) сигнал, отраженный от самолета с ТРД, с выхода приемника РЛС на промежуточной частоте подвергается узкополосной доплеровской фильтрации на основе процедуры быстрого преобразования Фурье (БПФ) и преобразуется в амплитудно-частотный спектр (АЧС), спектральные составляющие которого обусловлены отражениями сигнала от планера самолета с ТРД и вращающихся лопаток рабочего колеса первой ступени компрессора низкого давления (КНД) его силовой установки, определяется отсчет доплеровской частоты в АЧС с максимальной амплитудой спектральной составляющей спектра сигнала, соответствующего его отражениям от планера самолета с ТРД, который поступает на вход первого фильтра сопровождения, определяется отсчет доплеровской частоты в АЧС, соответствующий максимальной амплитуде спектральной составляющей спектра сигнала, находящийся справа по доплеровской частоте относительно спектральной составляющей сигнала, отраженного от планера самолета, который поступает на вход второго фильтра сопровождения первой компрессорной составляющей спектра сигнала, обусловленной его отражениями от вращающихся лопаток первой ступени рабочего колеса КНД, на каждом k-ом такте работы обоих оптимальных фильтров сопровождения определяется оценка разности  между оцененными значениями доплеровских частот, обусловленных отражениями от планера
между оцененными значениями доплеровских частот, обусловленных отражениями от планера  и вращающихся лопаток рабочего колеса первой ступени
и вращающихся лопаток рабочего колеса первой ступени  КНД силовой установки самолета, которая соответствует только одному типу самолета с ТРД, при этом весь диапазон возможных значений оценок разностей
КНД силовой установки самолета, которая соответствует только одному типу самолета с ТРД, при этом весь диапазон возможных значений оценок разностей  априорно разбивается на W неперекрывающихся друг с другом поддиапазонов, нижняя FHw и верхняя FBw границы каждого w-го поддиапазона
априорно разбивается на W неперекрывающихся друг с другом поддиапазонов, нижняя FHw и верхняя FBw границы каждого w-го поддиапазона  соответствующего w-му типу самолета с ТРД, определяются выражениями
соответствующего w-му типу самолета с ТРД, определяются выражениями

где FP - максимальная частота вращения ротора КНД силовой установки w-го типа самолета с ТРД;
n1 и n2 - соответственно минимальное и максимальное значение величины относительных оборотов вращения ротора силовой установки, одинаковые для всех типов самолетов с ТРД;
Nл - количество лопаток рабочего колеса первой ступени КНД силовой установки w-го типа самолета с ТРД,
за конечное количество тактов работы обоих фильтров сопровождения вычисляется вероятность попадания величины  в каждый из априорно сформированный w-й поддиапазон, определяется номер w-го поддиапазона, для которого величина вероятности максимальна, ее значение сравнивается с пороговым значением вероятности распознавания типа самолета с ТРД, при превышении порога принимается решение о распознавании w-го типа самолета с ТРД с вероятностью, не ниже заданной, в противном случае принимается решение о невозможности распознавания типа самолета с заданной вероятностью [1].
в каждый из априорно сформированный w-й поддиапазон, определяется номер w-го поддиапазона, для которого величина вероятности максимальна, ее значение сравнивается с пороговым значением вероятности распознавания типа самолета с ТРД, при превышении порога принимается решение о распознавании w-го типа самолета с ТРД с вероятностью, не ниже заданной, в противном случае принимается решение о невозможности распознавания типа самолета с заданной вероятностью [1].
Недостатком данного способа является низкая достоверность распознавания типа самолета с ТРД в импульсно-доплеровской РЛС. Это обусловлено тем, что данный способ распознавания справедлив лишь при выполнении условия, согласно которому отсчет доплеровской частоты в АЧС с максимальной амплитудой спектральной составляющей спектра сигнала должен обязательно соответствовать отражениям РЛ сигнала от планера самолета с ТРД и уже относительно данного отсчета в АЧС находится отсчет доплеровской частоты, соответствующий отражениям РЛ сигнала от первой ступени КНД его силовой установки (амплитуда спектральной составляющей сигнала, отраженного от первой ступени КНД, всегда должна быть меньше амплитуды спектральной составляющей сигнала, отраженного от планера самолета, и больше других спектральных составляющих в АЧС). В противном случае (при превышении амплитуды спектральной составляющей сигнала, отраженного от первой ступени КНД, амплитуды спектральной составляющей сигнала, отраженного от планера самолета) тип самолета с ТРД будет распознан не правильно.
Известен способ распознавания типа самолета с ТРД в импульсно-доплеровской РЛС, заключающийся в том, что РЛ сигнал, отраженный от самолета с ТРД, с выхода приемника РЛС на промежуточной частоте подвергается узкополосной доплеровской фильтрации на основе процедуры БПФ и преобразуется в АЧС, спектральные составляющие которого обусловлены отражениями сигнала от планера самолета с ТРД и вращающихся лопаток первой ступени рабочего колеса КНД его силовой установки, путем пороговой обработки АЧС сигнала формируют только те отсчеты Fm (где  М - общее количество отсчетов доплеровских частот) доплеровских частот с соответствующими амплитудами спектральных составляющих, которые превысили установленный порог, за время Тобз каждого обзора пространства измеряют два значения дальности Д1 и Д2 до самолета с ТРД, по измеренным значениям дальности Д1 и Д2 предварительно вычисляют частотную позицию доплеровской частоты
М - общее количество отсчетов доплеровских частот) доплеровских частот с соответствующими амплитудами спектральных составляющих, которые превысили установленный порог, за время Тобз каждого обзора пространства измеряют два значения дальности Д1 и Д2 до самолета с ТРД, по измеренным значениям дальности Д1 и Д2 предварительно вычисляют частотную позицию доплеровской частоты  обусловленной скоростью сближения носителя импульсно-доплеровской РЛС с планером самолета с ТРД, как
обусловленной скоростью сближения носителя импульсно-доплеровской РЛС с планером самолета с ТРД, как  (где λ - рабочая длина волны импульсно-доплеровской РЛС), в АЧС сигнала определяют ближайшее к предварительно вычисленной частотной позиции доплеровской частоты
(где λ - рабочая длина волны импульсно-доплеровской РЛС), в АЧС сигнала определяют ближайшее к предварительно вычисленной частотной позиции доплеровской частоты  значение доплеровской частоты
значение доплеровской частоты  с соответствующей амплитудой
с соответствующей амплитудой  спектральной составляющей, превысившей установленный порог, которое окончательно определяет доплеровскую частоту сигнала Fп в его АЧС, обусловленную скоростью сближения носителя импульсно-доплеровской РЛС с планером самолета с ТРД, определяют в АЧС сигнала позицию доплеровской частоты
спектральной составляющей, превысившей установленный порог, которое окончательно определяет доплеровскую частоту сигнала Fп в его АЧС, обусловленную скоростью сближения носителя импульсно-доплеровской РЛС с планером самолета с ТРД, определяют в АЧС сигнала позицию доплеровской частоты  (где g=1, …, (m-1), (m+1), …, М), на которой находится спектральная составляющая, превысившая установленный порог и имеющая максимальную амплитуду Аg, которая соответствует значению доплеровской частоты Fк, обусловленной скоростью сближения носителя импульсно-доплеровской РЛС с вращающимися лопатками первой ступени КНД силовой установки самолета с ТРД, вычисляют разность доплеровских частот ΔFпк=(FП-Fк), априорно разбивают диапазон разностей ΔFпк на W неперекрывающихся поддиапазонов, нижняя FHw и верхняя FBw границы каждого w-го поддиапазона
(где g=1, …, (m-1), (m+1), …, М), на которой находится спектральная составляющая, превысившая установленный порог и имеющая максимальную амплитуду Аg, которая соответствует значению доплеровской частоты Fк, обусловленной скоростью сближения носителя импульсно-доплеровской РЛС с вращающимися лопатками первой ступени КНД силовой установки самолета с ТРД, вычисляют разность доплеровских частот ΔFпк=(FП-Fк), априорно разбивают диапазон разностей ΔFпк на W неперекрывающихся поддиапазонов, нижняя FHw и верхняя FBw границы каждого w-го поддиапазона  соответствующего w-му типу цели, определяются выражениями (1) и (2), при попадании разности доплеровских частот ΔFпк в w-й поддиапазон принимают решение о w-м типе самолета с ТРД [2].
соответствующего w-му типу цели, определяются выражениями (1) и (2), при попадании разности доплеровских частот ΔFпк в w-й поддиапазон принимают решение о w-м типе самолета с ТРД [2].
Недостатком данного способа является низкая достоверность распознавания типа самолета с ТРД в импульсно-доплеровской РЛС. Это обусловлено тем, что данный способ распознавания справедлив лишь при выполнении условия, согласно которому амплитуда спектральной составляющей сигнала, отраженного от первой ступени КНД, всегда должна быть меньше амплитуды спектральной составляющей сигнала, отраженного от планера самолета, и больше других спектральных составляющих в АЧС. В противном случае тип самолета с ТРД не будет правильно распознан. Т.е. достоверность распознавания типа самолета с ТРД в импульсно-доплеровской РЛС существенно зависит от правильности распознавания в АЧС спектральных составляющих сигнала, обусловленных отражениями от планера и первой ступени КНД.
Цель изобретения - распознать в импульсно-доплеровской радиолокационной станции с вероятностью не ниже заданной Рзад тип воздушной цели из класса «Самолет с ТРД» при стационарных условиях ее полета.
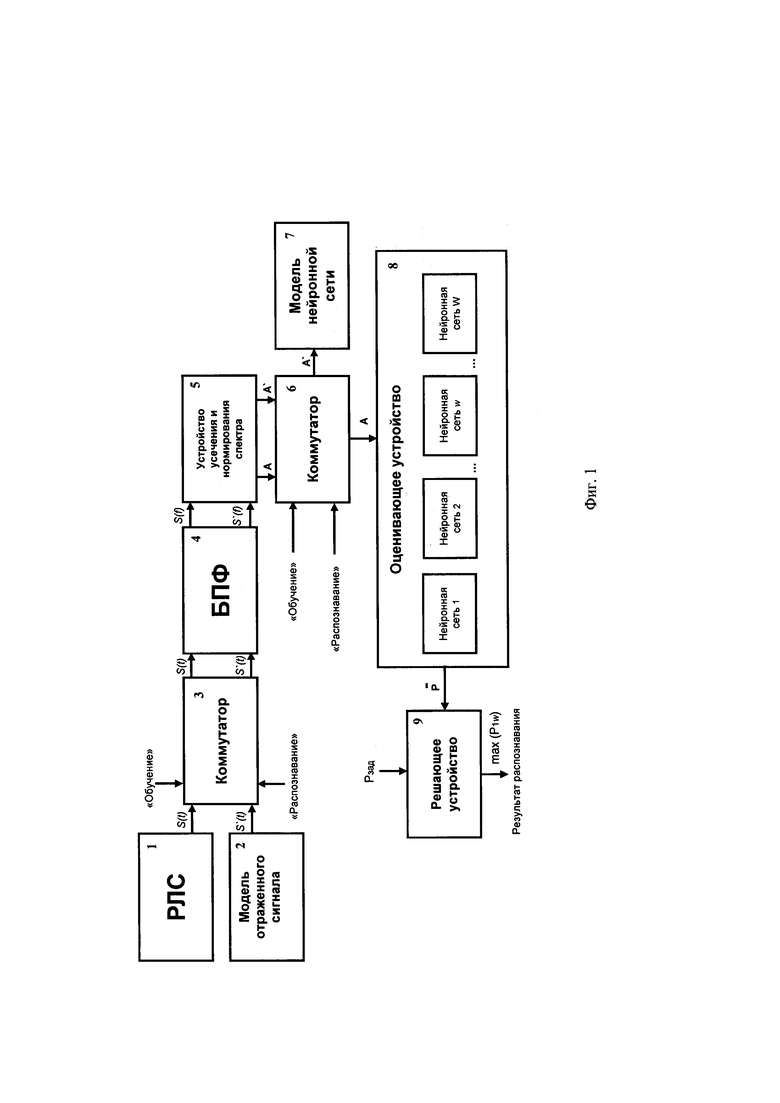
С этой целью, в способе распознавания типа самолета с ТРД в импульсно-доплеровской РЛС, заключающемся в том, что радиолокационный сигнал S(t), отраженный от самолета с ТРД, с выхода приемника РЛС через первый Коммутатор в режиме «Распознавание» подвергается в Блоке БПФ узкополосной доплеровской фильтрации на основе процедуры быстрого преобразования Фурье и преобразуется в АЧС S(ƒ)={F,A} (где F - значения частот спектральных составляющих; А - соответствующие им амплитуды), который поступает на Устройство усечения и нормирования спектра, в котором производится вычисление поддиапазона нахождения информативных параметров, определяющихся выражениями (1, 2), с дальнейшим усечением по данному поддиапазону и нормированием полученных спектральных составляющих по амплитуде, которое заключается в приведении массива амплитуд к значениям [-1; 1], необходимым для устойчивой работы модели нейронной сети. Усеченный и нормированный массив амплитуд А через второй Коммутатор в режиме «Распознавание» поступает на соответствующие входы Оценивающего устройства. Оценивающее устройство представляет собой множество W предварительно обученных нейронных сетей в блоке Модель нейронной сети, каждая из которых производит распознавание только одного из W типов априорного алфавита классов. Выходом  нейронной сети в Оценивающем устройстве будет являться вероятность Р1 совпадения поступившего образа нормированных амплитуд А с одним из W типов априорного алфавита классов и вероятность Р2 несоответствия поданного образа нормированных амплитуд А сформированному нейронной сетью обобщенного образа. С выхода Оценивающего устройства вектор оценок
нейронной сети в Оценивающем устройстве будет являться вероятность Р1 совпадения поступившего образа нормированных амплитуд А с одним из W типов априорного алфавита классов и вероятность Р2 несоответствия поданного образа нормированных амплитуд А сформированному нейронной сетью обобщенного образа. С выхода Оценивающего устройства вектор оценок 
 вероятностей отнесения образа нормированных амплитуд к w типу воздушной цели из W возможных поступает на вход Решающего устройства, где производится сравнение вероятностей совпадения поступившего образа нормированных амплитуд А с одним из W типов априорного алфавита классов Р1 и вероятностей несоответствия поданного образа нормированных амплитуд А сформированному нейронной сетью обобщенного образа Р2 с заданными пороговыми вероятностями Pпор 1 и Рпор 2, соответственно. В случае выполнения условия P1 w>Рпор 1 ∪ Р2 w>Рпор 2 по критерию максимума вероятности совпадения поступившего образа нормированных амплитуд А с одним из W типов априорного алфавита классов P1w (max (P1w)) производится однозначное отнесение к конкретному типу w воздушной цели из состава априорного алфавита классов. При превышении величины max(P1w) заданного порогового значения вероятности распознавания Рзад значение w конкретного типа воздушной цели из состава априорного алфавита классов поступает на выход Решающего устройства в качестве результата распознавания.
вероятностей отнесения образа нормированных амплитуд к w типу воздушной цели из W возможных поступает на вход Решающего устройства, где производится сравнение вероятностей совпадения поступившего образа нормированных амплитуд А с одним из W типов априорного алфавита классов Р1 и вероятностей несоответствия поданного образа нормированных амплитуд А сформированному нейронной сетью обобщенного образа Р2 с заданными пороговыми вероятностями Pпор 1 и Рпор 2, соответственно. В случае выполнения условия P1 w>Рпор 1 ∪ Р2 w>Рпор 2 по критерию максимума вероятности совпадения поступившего образа нормированных амплитуд А с одним из W типов априорного алфавита классов P1w (max (P1w)) производится однозначное отнесение к конкретному типу w воздушной цели из состава априорного алфавита классов. При превышении величины max(P1w) заданного порогового значения вероятности распознавания Рзад значение w конкретного типа воздушной цели из состава априорного алфавита классов поступает на выход Решающего устройства в качестве результата распознавания.
Для функционирования Оценивающего устройства необходимо предварительное обучение нейронных сетей на распознавание конкретного типа воздушной цели, которое производится следующим образом. С выхода блока Модель отраженного сигнала модельный отраженный от самолета с ТРД радиолокационный сигнал S'(t), рассчитанный для разных типов самолетов с ТРД, на промежуточной частоте через первый Коммутатор в режиме «Обучение» поступает на вход Блока БПФ, где подвергается узкополосной доплеровской фильтрации на основе процедуры быстрого преобразования Фурье и преобразуется в АЧС S'(ƒ)={F',A'}, спектральные составляющие которого обусловлены отражениями сигнала от планера самолета с ТРД и вращающихся лопаток рабочего колеса КНД его силовой установки. Данные спектральные составляющие с соответствующими частотами и амплитудами поступают на Устройство усечения и нормирования спектра, в котором производится вычисление поддиапазона нахождения информативных параметров, определяющихся выражениями (1, 2), с дальнейшим усечением по данному поддиапазону и нормированием полученных спектральных составляющих по амплитуде, которое заключается в приведении массива амплитуд к значениям [-1; 1], необходимым для устойчивой работы модели нейронной сети. Усеченный и нормированный массив амплитуд А через второй коммутатор в режиме «Обучение» поступает на соответствующие входы Модели нейронной сети для ее предварительного обучения за М периодов моделирования модельного радиолокационного сигнала S'(t).
Архитектура модели нейронной сети представляет из себя многослойную глубокую нейронную сеть с динамическими связями прямого распространения, состоящей из трех слоев [3].
Первый слой нейронов - входной слой сети, на i вход которого последовательно подаются значения нормированных амплитуд спектрально-доплеровского портрета, поступившие с Устройства усечения и нормирования спектрально-доплеровского портрета.
Второй слой нейронов - это скрытый слой с нелинейной функцией активации.
Третий слой - выходной слой сети, на j выходах которого формируются оценки вероятностей отнесения Р1 и несоответствия Р2 воздушной цели к конкретному типу.
Новыми признаками, обладающими существенными отличиями, являются следующие.
1. Использование значений всех амплитуд спектрально-доплеровского портрета в конкретном поддиапазоне нахождения информативных признаков, которое позволяет решить недостаток, связанный с вероятностным процессом распознавания в АЧС спектральных составляющих сигнала, обусловленных отражениями от планера и первой ступени КНД.
2. Использование оптимального решающего правила в виде нейронной сети при распознавании различных типов воздушной цели из класса «Самолет с ТРД» в импульсно-доплеровской РЛС при стационарных условиях ее полета.
3. Предварительное обучение нейронной сети для каждого w-го типа воздушной цели по значениям массива нормированных амплитуд А на модельных (с возможностью обучения и на реальных) сигналах, отраженных от вращающихся лопастных структур ТРД.
4. Введение в Решающем устройстве двух пороговых вероятностей Рпор 1 и Рпор 2 и использование в нем (Решающем устройстве) вектора оценок вероятностей  для распознавания конкретного типа воздушной цели.
для распознавания конкретного типа воздушной цели.
Данные признаки обладают существенными отличиями, так как в известных способах не обнаружены.
Применение всех новых признаков в совокупности с известными позволит распознать в импульсно-доплеровской РЛС с вероятностью не ниже заданной Рзад различные типы воздушной цели из класса «Самолет с ТРД» при стационарных условиях ее полета.
На фигуре приведена блок-схема, поясняющая предлагаемый способ распознавания различных типов воздушной цели из класса «Самолет с ТРД» при различных условиях ее полета на основе нейронной сети.
Для оценки работоспособности предлагаемого способа было проведено его имитационное моделирование с использованием РЛ сигналов, отраженных от реальных ЛА, которые (сигналы) были зарегистрированы (с помощью специального бортового регистратора, установленного в приемник импульсно-доплеровской бортовой РЛС современного самолета) на промежуточной частоте с выхода линейной части приемника бортовой РЛС с фазированной антенной решеткой, работающей в сантиметровом диапазоне волн.
В качестве реальных ЛА, от которых были зарегистрированы отраженные РЛ, использовались 5 типов самолетов с ТРД.
При узкополосном спектральном анализе зарегистрированных реальных РЛ сигналов применялся алгоритм БПФ с эквивалентной полосой пропускания одного бина, равной 10 Гц.
Пороговое значение вероятностей принималось равным Рпор 1=0,3 и Рпор 2=0,2, Рзад=0.9 соответственно.
Величина дискрета - Т=0,1 с.
В таблице 1 приведены результаты моделирования - вероятности правильного распознавания воздушной цели из класса «Самолет с ТРД» с доверительной вероятностью 0,95 при отношении сигнал/шум 14 дБ.
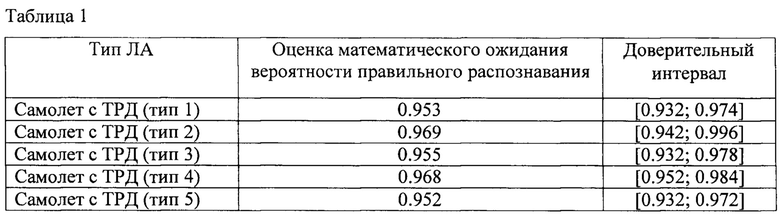
Таким образом, применение предлагаемого изобретения позволит повысить достоверность распознавания типа самолета с ТРД в импульсно-доплеровской РЛС независимо от достоверности распознавания в АЧС спектральных составляющих сигнала, обусловленных отражениями от планера и первой ступени КНД.
ИСТОЧНИКИ ИНФОРМАЦИИ:
1. Пат. 2419815 Российская Федерация, МПК G01S 13/52 (2006.01). Способ сопровождения воздушной цели из класса «самолет с турбореактивным двигателем» [Текст] / Богданов А.В., Васильев О.В., Исаков И.Н., Ситников А.Г., Филонов А.А.; заявитель и патентообладатель ОАО ТСКБ "АЛМА3-АНТЕЙ" им. АКАДЕМИКА А.А. РАСПЛЕТИНА (RU). - №2009140853/09; заявл. 03.11.2009; опубл. 27.05.2011, Бюл. №15.
2. Пат. 2705070 Российская Федерация, МПК G01S 13/52 (2006.01). Способ распознавания типа самолета с турбореактивным двигателем в импульсно-доплеровской радиолокационной станции [Текст] / Богданов А.В., Голубенко В.А., Коваленко АГ., Корнилов А.А., Кучин А.А., Лобанов А.А., Филонов А.А.; заявитель и патентообладатель Военная академия воздушно-космической обороны имени Маршала Советского Союза Г.К. Жукова (RU). - №2019111580; заявл. 16.04.2019; опубл. 05.11.2019, Бюл. №31 (прототип).
3. Татузов А.Л. Нейронные сети в задачах радиолокации. Кн. 28. // М.: Радиотехника, 2009.
Фигура 1
1 - радиолокационная станция: 2 - блок модели отраженного от воздушной цели радиолокационного сигнала сантиметрового диапазона с учетом турбинного эффекта; 3,6 - коммутаторы; 4 - блок быстрого преобразования Фурье; 5 - устройство усечения и нормирования спектра; 7 - модель нейронной сети; 8 - оценивающее устройство; 9 - решающее устройство.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ распознавания типового состава групповой воздушной цели различных классов при различных условиях ее полета на основе калмановской фильтрации и нейронной сети | 2022 |
|
RU2802653C1 |
| Способ многопризнакого распознавания в многофункциональной радиолокационной станции класса летательного аппарата по принципу "самолет с турбореактивным двигателем - самолет с турбовинтовым двигателем - вертолет - ракета - беспилотный летательный аппарат" на основе совместного применения калмановской фильтрации и нейронной сети | 2024 |
|
RU2832712C1 |
| Способ всеракурсного распознавания в радиолокационной станции типового состава групповой воздушной цели при различных условиях полета и воздействии уводящих по скорости помех на основе калмановской фильтрации и нейронной сети | 2023 |
|
RU2816189C1 |
| Способ распознавания типа самолёта с турбореактивным двигателем в импульсно-доплеровской радиолокационной станции при воздействии имитирующих помех | 2020 |
|
RU2735314C1 |
| Способ всеракурсного распознавания типового состава групповой воздушной цели из класса "самолеты с турбореактивными двигателями" на основе калмановской фильтрации и нейронных сетей | 2024 |
|
RU2835772C1 |
| Способ распознавания типа самолёта с турбореактивным двигателем в импульсно-доплеровской радиолокационной станции | 2019 |
|
RU2705070C1 |
| СПОСОБ РАСПОЗНАВАНИЯ ТИПА САМОЛЁТА С ТУРБОРЕАКТИВНЫМ ДВИГАТЕЛЕМ В ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2020 |
|
RU2731878C1 |
| Способ распознавания типового состава групповой воздушной цели из класса "самолеты с турбореактивными двигателями" на основе калмановской фильтрации и нейронной сети | 2022 |
|
RU2786518C1 |
| СПОСОБ РАСПОЗНАВАНИЯ ТИПА ОДИНОЧНОЙ ВОЗДУШНОЙ ЦЕЛИ ИЗ КЛАССА "САМОЛЕТ С ТУРБОРЕАКТИВНЫМ ДВИГАТЕЛЕМ" | 2023 |
|
RU2807510C1 |
| Способ распознавания типа самолёта с турбореактивным двигателем в импульсно-доплеровской радиолокационной станции при воздействии уводящей по скорости помехи | 2019 |
|
RU2732281C1 |
Изобретение относится к области радиолокации и может быть использовано для распознавания в импульсно-доплеровской радиолокационной станции (РЛС) различных типов воздушной цели из класса «Самолет с турбореактивным двигателем (ТРД)» при стационарных условиях ее полета на основе нейронной сети. Технический результат заключается в разработке способа, который позволяет распознать в импульсно-доплеровской РЛС с вероятностью, не ниже заданной, тип воздушной цели из класса «Самолет с ТРД» при стационарных условиях ее полета. В заявленном способе радиолокационный сигнал S(t), отраженный от самолета с ТРД, подвергается в Блоке быстрого преобразования Фурье (БПФ) узкополосной доплеровской фильтрации и преобразуется в амплитудно-частотный спектр (АЧС) S(f)={F,А}, где F - значения частот спектральных составляющих, А - соответствующие им амплитуды. В Устройстве усечения и нормирования спектра вычисляется поддиапазон нахождения информативных признаков и производится усечение АЧС по вычисленному поддиапазону и нормирование по амплитуде. Усеченный и нормированный массив амплитуд А поступает на соответствующие входы Оценивающего устройства, представляющего собой множество W предварительно обученных нейронных сетей в блоке Модель нейронной сети. Каждая нейронная сеть производит распознавание только одного из W типов априорного алфавита классов. Выходом w-й  нейронной сети в Оценивающем устройстве будет являться вероятность Р1 совпадения поступившего образа нормированных амплитуд А с одним из W типов априорного алфавита классов и вероятность Р2 несоответствия поданного образа нормированных амплитуд А сформированному нейронной сетью обобщенного образа. С выхода Оценивающего устройства вектор оценок
нейронной сети в Оценивающем устройстве будет являться вероятность Р1 совпадения поступившего образа нормированных амплитуд А с одним из W типов априорного алфавита классов и вероятность Р2 несоответствия поданного образа нормированных амплитуд А сформированному нейронной сетью обобщенного образа. С выхода Оценивающего устройства вектор оценок  вероятностей отнесения образа нормированных амплитуд к w типу воздушной цели из W возможных поступает на вход Решающего устройства. В Решающем устройстве производится сравнение вероятностей Р1 и Р2 с заданными пороговыми вероятностями Pпор1 и Рпор2, соответственно. В случае выполнения условия P1w>Рпор1∪Р2w>Рпор2 по критерию максимума вероятности P1w производится однозначное отнесение к конкретному типу w воздушной цели из состава априорного алфавита классов, значение которого поступает на выход Решающего устройства в качестве результата распознавания. Обучение нейронных сетей производится в Модели нейронной сети по типам W априорного алфавита классов при помощи модельного отраженного радиолокационного сигнала. 1 ил., 1 табл.
вероятностей отнесения образа нормированных амплитуд к w типу воздушной цели из W возможных поступает на вход Решающего устройства. В Решающем устройстве производится сравнение вероятностей Р1 и Р2 с заданными пороговыми вероятностями Pпор1 и Рпор2, соответственно. В случае выполнения условия P1w>Рпор1∪Р2w>Рпор2 по критерию максимума вероятности P1w производится однозначное отнесение к конкретному типу w воздушной цели из состава априорного алфавита классов, значение которого поступает на выход Решающего устройства в качестве результата распознавания. Обучение нейронных сетей производится в Модели нейронной сети по типам W априорного алфавита классов при помощи модельного отраженного радиолокационного сигнала. 1 ил., 1 табл.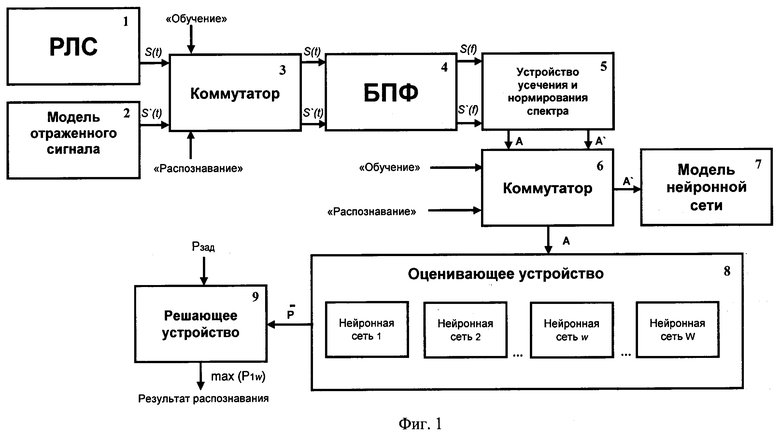
Способ распознавания типа воздушной цели из класса «Самолет с турбореактивным двигателем» на основе нейронной сети, заключающийся в том, что радиолокационный сигнал, отраженный от самолета с турбореактивным двигателем, с выхода приемника импульсно-доплеровской радиолокационной станции на промежуточной частоте подвергается узкополосной доплеровской фильтрации на основе процедуры быстрого преобразования Фурье и преобразуется в амплитудно-частотный спектр, спектральные составляющие которого обусловлены отражениями сигнала от планера самолета с турбореактивным двигателем и вращающихся структур турбореактивных двигателей самолетов, подается на Устройство усечения и нормирования спектра, в котором производится вычисление поддиапазона нахождения информативных параметров по выражениям

где FP - максимальная частота вращения ротора компрессора низкого давления силовой установки w-го  типа самолета с турбореактивным двигателем;
типа самолета с турбореактивным двигателем;
n1 и n2 - соответственно минимальное и максимальное значение величины относительных оборотов вращения ротора силовой установки, одинаковые для всех типов самолетов с турбореактивным двигателем;
Nл - количество лопаток рабочего колеса первой ступени компрессора низкого давления силовой установки w-го типа самолета с турбореактивным двигателем;
с дальнейшим усечением по данному поддиапазону и нормированием всех спектральных составляющих поддиапазона по амплитуде, которые подаются на Оценивающее устройство, представляющее из себя множество W нейронных сетей, предварительно за М периодов моделирования радиолокационного сигнала в блоке Модель нейронной сети обученных на распознавание конкретного типа воздушной цели на основании всех значений усеченных по частоте нормированных амплитуд модельных отраженных от самолета с турбореактивным двигателем (ТРД) радиолокационных сигналов, рассчитанных для разных типов самолетов с ТРД, нормирование амплитуд модельных отраженных сигналов осуществляют посредством приведения массива амплитуд к значениям [-1;1], необходимым для устойчивой работы модели нейронной сети, архитектура которой представляет из себя многослойную глубокую нейронную сеть с динамическими связями прямого распространения, состоящую из трех слоев нейронов, первый из которых является входным слоем сети, на i вход которого последовательно подают значения нормированных амплитуд спектрально-доплеровского портрета, поступивших с Устройства усечения и нормирования спектра, второй слой нейронов - скрытый слой с нелинейной функцией активации, а третий слой нейронов - выходной слой нейронной сети, на j выходах которого формируются оценки вероятностей отнесения P1 и несоответствия Р2 воздушной цели к конкретному типу, причем каждая обученная нейронная сеть производит распознавание только одного из W типов априорного алфавита классов, на выходе которого формируется вектор оценок

где P1 - вероятность совпадения поступившего образа нормированных амплитуд с одним из W типов априорного алфавита классов;
Р2 - вероятность несоответствия поданного образа нормированных амплитуд сформированному нейронной сетью обобщенного образа,
который поступает на вход Решающего устройства, где производится сравнение вероятностей совпадения поступившего образа нормированных амплитуд с одним из W типов априорного алфавита классов Р1 и вероятностей несоответствия поданного образа нормированных амплитуд сформированному нейронной сетью обобщенного образа Р2 с заданными пороговыми вероятностями Рпор 1 и Рпор 2, соответственно, при выполнении условия P1 w>Рпор 1 ∪ P2 w>Рпор 2 по критерию максимума вероятности совпадения поступившего образа нормированных амплитуд с одним из W типов априорного алфавита классов P1w (max (P1w)) производится однозначное отнесение к конкретному типу w воздушной цели из состава априорного алфавита классов, при превышении величины max(P1w) заданного порогового значения вероятности распознавания Рзад значение w конкретного типа воздушной цели из состава априорного алфавита классов поступает на выход Решающего устройства.
| Способ распознавания типового состава групповой воздушной цели из класса "самолеты с турбореактивными двигателями" на основе калмановской фильтрации и нейронной сети | 2022 |
|
RU2786518C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ВОЗДУШНОЙ ЦЕЛИ ИЗ КЛАССА "САМОЛЕТ С ТУРБОРЕАКТИВНЫМ ДВИГАТЕЛЕМ" | 2009 |
|
RU2419815C1 |
| Способ распознавания типа самолёта с турбореактивным двигателем в импульсно-доплеровской радиолокационной станции | 2019 |
|
RU2705070C1 |
| US 2022137181 A1, 05.05.2022 | |||
| СПОСОБ СОПРОВОЖДЕНИЯ ГРУППОВОЙ ВОЗДУШНОЙ ЦЕЛИ ИЗ КЛАССА "САМОЛЕТЫ С ТУРБОРЕАКТИВНЫМИ ДВИГАТЕЛЯМИ" | 2011 |
|
RU2456633C1 |
| АМОСОВ О.С | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| БОГДАНОВ А.В., ПЕТРОВ | |||

