ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к авиационной технике, в частности, к беспилотным летательным аппаратам вертикального взлета и посадки.
УРОВЕНЬ ТЕХНИКИ
В настоящее время широкое распространение получили беспилотные авиационные устройства вертикального взлета и посадки мультироторного типа. Наибольшее распространение получили модели с четырьмя несущими винтами - квадрокоптеры. Они применяются как в бытовой сфере, так и в профессиональной. Профессиональные квадрокоптеры могут достигать взлетной массы от нескольких килограммов до десятков килограмм и размеров (без учета винтов) 1-1,5 метра, (https://quadrone.ru/blog/stati/kakletaet-kvadrokopter-propelery-i-dvigatel-v-hodrobnosteakh).
Управление квадрокоптером осуществляется пультом дистанционного управления, который посылает сигналы на полетный контроллер. Полетный контроллер передает эту информацию в электронные регуляторы скорости (ESC) каждого двигателя, которые направляют каждый двигатель на увеличение или уменьшение оборотов винтов. Управление по тангажу, крену и рысканию осуществляется увеличением и уменьшением оборотов роторов соответствующих двигателей. Электронные компоненты, двигатели, воздушные винты изготавливаются в промышленных масштабах. Освоены способы управления коптерами.
Наиболее близким к предлагаемому техническому решению является конструкция беспилотного летательного аппарата вертикального взлета и посадки (RU 2799426, 2023, Битуев А.Г.)
Известный беспилотный летательный аппарат вертикального взлета и посадки (далее -БПЛА) содержит фюзеляж с электрическими двигателями с приводными валами и редукторами расположенными в его средней части. Вентиляторы, установленные в средней части фюзеляжа, имеют возможность создавать поток воздуха из отверстия в верхней части фюзеляжа в направлении от фюзеляжа в стороны, на крылья, закрытые с концов обтекателями. Система связи и бортовая аппаратура управления расположена в носовой части фюзеляжа. Компрессор с ресивером расположены в хвостовой части фюзеляжа и имеют возможность подачи сжатого воздуха к соплам системы управления, установленными на штангах. Сопла системы управления обеспечивают управление по тангажу, рысканию и крену на всех режимах полета. Заслонки расположенные под задней кромкой крыльев и соединенные с устройствами привода сообщают БПЛА горизонтальную скорость вперед и назад. Аккумулятор расположен внизу средней части фюзеляжа. Достоинством известного технического решения является возможность вертикального взлета и посадки, большая грузоподъемность, продолжительность полета. Летательный аппарат может применяться как БПЛА малого радиуса действия - взлетная масса 5-50 кг, дальность действия 10-70 км, в разведывательных и ударных целях. Основным недостатком известного прототипа является система струйного управления. Система струйного управления не применяется на известных БПЛА вертикального взлета и посадки. Требуются новые способы управления, что усложняет управление аппаратом. Применение новой, не апробированной системы управления снижает надежность летательного аппарата. Разработка и установка системы струйного управления только на данный тип БПЛА экономически нецелесообразно.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Технической задачей изобретения является повышение надежности и управляемости беспилотного летательного аппарата.
Поставленная задача решена благодаря тому, что предлагаемый беспилотный летательный аппарат вертикального взлета и посадки содержит в себе: фюзеляж (1), имеющий носовую часть, хвостовую часть и среднюю часть, расположенную между ними, электрические двигатели (9) с приводными валами (10), расположенные в средней части фюзеляжа, приводные валы (10) кинематически соединенные с осями вентиляторов (4) через редукторы (11), вентиляторы (4), установленные в средней части фюзеляжа (1) таким образом, что имеют возможность создавать поток текучей среды из отверстия в верхней части фюзеляжа в направлении от фюзеляжа в стороны, крылья (2) закрытые с концов обтекателями (3), выполненные таким образом, что подъемная сила создается потоком текучей среды в направлении от фюзеляжа в стороны, систему связи и бортовую аппаратуру управления (14), устройства бортового радиоэлектронного оборудования (16), расположенные в носовой части фюзеляжа,
электродвигатели с электронными регуляторами оборотов (7) и винтами (17), соединенные шлейфом с полетным контроллером, выполненные с возможностью управления по тангажу, рысканию и крену на всех режимах полета, аккумулятор (12) расположенный в средней части фюзеляжа, шасси (8).
По сути, поставленная задача достигается путем объединения достоинств несущей системы прототипа с преимуществами системы управления квадрокоптера следующим образом: беспилотный летательный аппарат вертикального взлета и посадки, имеющий фюзеляж, крылья, вентиляторы, электрические двигатели отличается тем, что управление на всех режимах полета осуществляется электродвигателями с электронными регуляторами оборотов и винтами, соединенными шлейфом с полетным контроллером. В предпочтительных формах воплощения вышеописанного беспилотного летательного аппарата:
- в плоскости сечения профиля крыла (2) перпендикулярно передней и задней кромке установлены перегородки (5).
- в каналы с щелями (13) в крыльях подается сжатый воздух от компрессора с ресивером (15) таким образом, что истекающий из щелей скоростной поток сжатого воздуха направляется на верхнюю поверхность крыла по всей длине.
Предлагаемое изобретение иллюстрируется чертежами.
КРАТКОЕ ОПИСАНИЕ ФИГУР ЧЕРТЕЖЕЙ
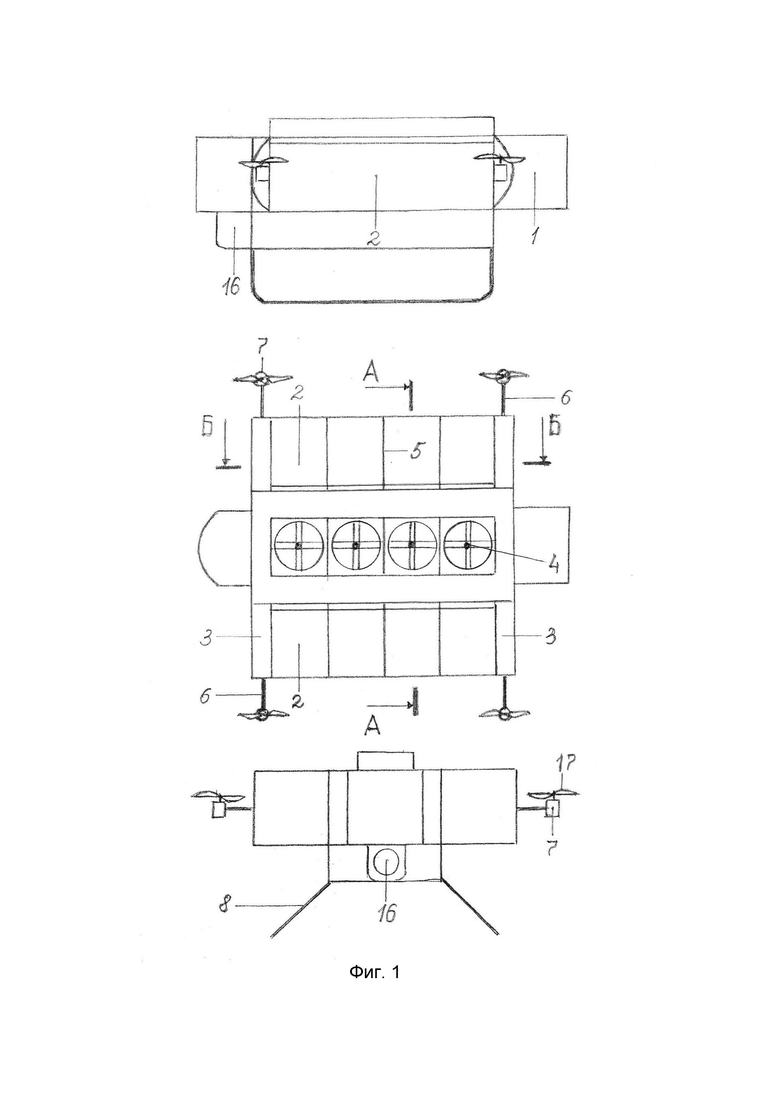
На Фиг. 1 представлен общий вид аппарата в трех проекциях.
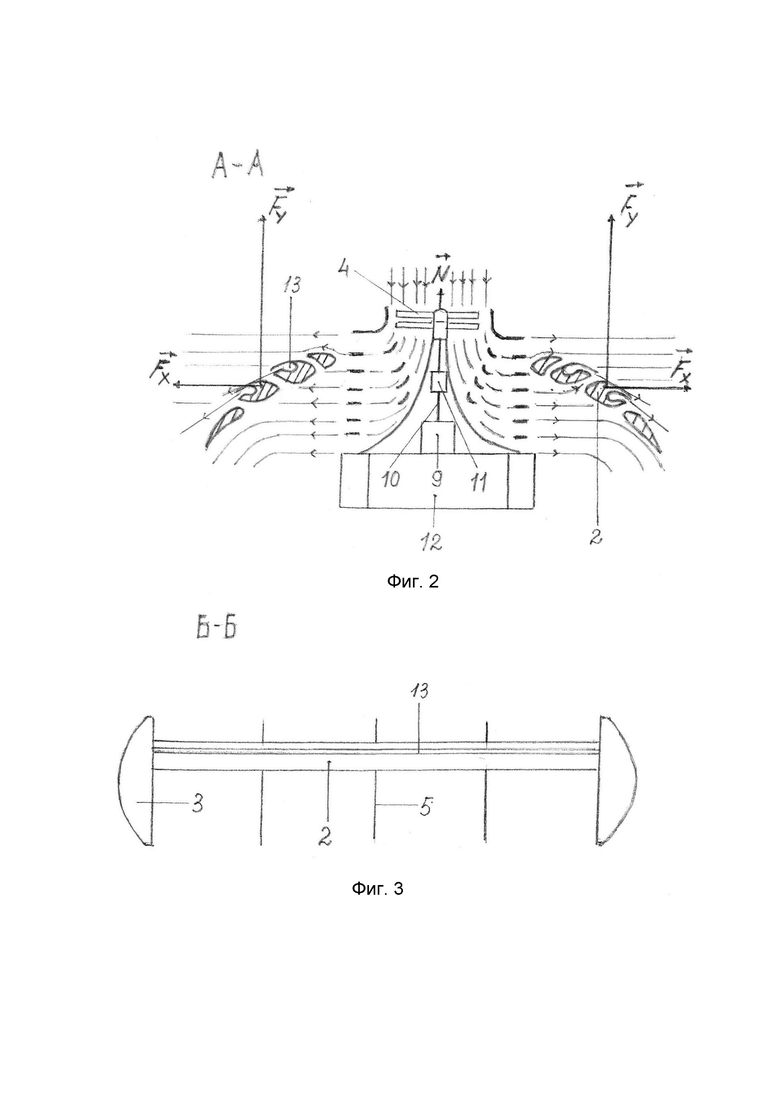
На Фиг. 2 показано сечение А-А.
На Фиг. 3 показано сечение Б-Б.
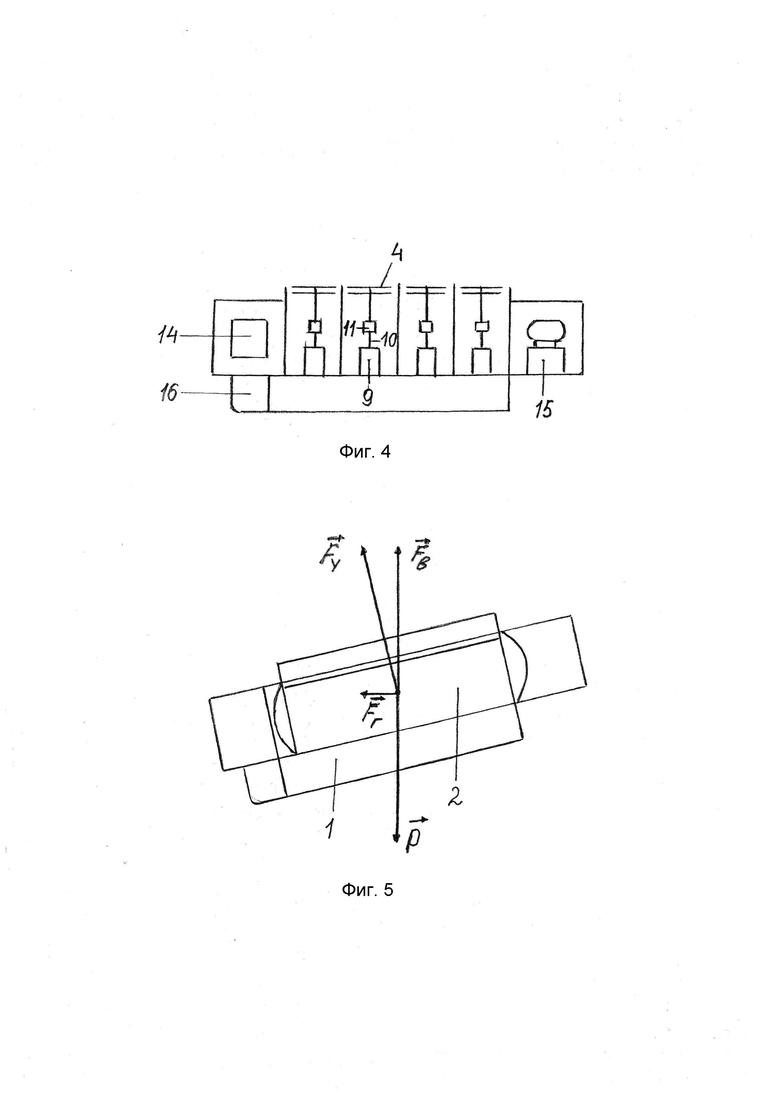
На Фиг. 4 изображена кинематическая схема.
На Фиг. 5 показана схема создания горизонтальной тяги.
Позициями 1-17 обозначены:
1 - фюзеляж,
2 - крыло,
3 - обтекатель крыла,
4 - вентилятор,
5 - перегородка,
6 - штанга,
7 - электродвигатель с электронным регулятором оборотов,
8 - шасси,
9 - электрический двигатель,
10 - приводной вал,
11 - редуктор,
12 - аккумулятор,
13 - канал с щелью,
14 - система связи и бортовая аппаратура управления,
15- компрессор с ресивером,
16 - устройства бортового радиоэлектронного оборудования,
17 - винт.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Как показано на Фиг. 1 БПЛА содержит: 1 - фюзеляж, 2- крылья,
3 - обтекатели крыльев,
4 - вентиляторы,
5 - перегородки,
6 - штанги,
7 - электродвигатели с электронными регуляторами оборотов,
8 - шасси.
16 - устройства бортового радиоэлектронного оборудования,
17 - винты.
Как показано на Фиг. 2 по бокам в средней части фюзеляжа 1 передней кромкой друг к другу, параллельно и симметрично относительно продольной оси аппарата установлены крылья 2 закрытые с концов обтекателями 3. Электрические двигатели 9 с приводными валами 10 через редукторы 11 передают крутящий момент двухступенчатым вентиляторам с роторами противоположного вращения 4. В крыльях 2 по всей длине выполнены каналы с щелями 13, через которые истекает скоростной плоский поток сжатого воздуха направленный на верхнюю поверхность крыла. При этом кривизна аэродинамического профиля обеспечивает отклонение части воздушного потока вентиляторов вниз.
Как показано на Фиг. 3 воздушные потоки вентиляторов 4 разделены перегородками 5. Как показано на Фиг. 4 в носовой части фюзеляжа 1 расположены система связи и бортовая аппаратура управления 14, устройства бортового радиоэлектронного оборудования 16. В средней части фюзеляжа последовательно установлены электрические двигатели 9 с приводными валами 10, кинематически соединенными с осями вентиляторов 4 через редукторы 11. В хвостовой части фюзеляжа расположен компрессор с ресивером 15 обеспечивающий подачу по трубопроводам сжатого воздуха к каналам с щелью (13).
Как показано на Фиг. 5 горизонтальная тяга (Fr) создается при наклоне фюзеляжа 1 вперед (назад).
Управление БПЛА на всех режимах полета осуществляется дистанционно с пульта. В системе управления применяются производимые электронные компоненты: электронные регуляторы оборотов, полетный контроллер, шлейфы (не показано). Электродвигатели с электронными регуляторами оборотов 7 и винтами 17 на валу ротора установлены на штангах 6 по бокам фюзеляжа. Изменения на пульте дистанционного управления посылают сигналы на полетный контроллер. Полетный контроллер передает эту информацию по шлейфу в электронные регуляторы оборотов каждого двигателя, которые направляют каждый двигатель на увеличение или уменьшение оборотов. Таким образом производится управление по тангажу, рысканию и крену на всех режимах полета. (Фиг. 1) Вертикальный взлет осуществляется следующим образом:
1) после подачи электрической энергии электрическим двигателям 9 приводные валы 10 передают крутящий момент через редукторы 11 вентиляторам 4. Воздушный поток вентиляторов обтекая крылья 2 создает подъемную силу (Fy) и силу лобового сопротивления (Fx) и далее частично отклоняясь вниз создает силу тяги (N).
В каналы с щелями 13 подается сжатый воздух от компрессора 15. Плоский скоростной поток сжатого воздуха истекает на верхнюю поверхность крыльев по всей длине. Отраженный от поверхности отклоненный воздушный поток создает избыточное давление под крылом. (Фиг. 2)
2) как только вертикальная тяга, как сумма подъемных сил крыльев (Fy) и силы тяги вентиляторов (N), станет больше силы тяжести произойдет отрыв БПЛА от поверхности и начнется вертикальный взлет.
Осуществление крейсерского режима полета:
1) после набора определенной высоты электронные регуляторы оборотов увеличивают обороты задних двигателей 7 с винтами 17, что производит наклон фюзеляжа 1 вперед. При наклоне крыльев вперед образуется горизонтальная составляющая (Fг) подъемной силы (Fу) которая и сообщает аппарату горизонтальную скорость. Наклон крыльев уменьшает вертикальную составляющую (Fв) подъемной силы (Fу), что может привести к потере высоты полета аппарата. Чтобы этого не произошло, одновременно с увеличением угла наклона крыльев подается команда на увеличение оборотов двигателей 9 вентиляторов 4. Увеличение оборотов двигателей повышает скорость воздушного потока вентиляторов и следовательно увеличивает подъемную силу. Тем самым вертикальная составляющей (Fв) подъемной силы становится равной силе тяжести (Р), что позволяет продолжить полет без потери высоты. (Фиг. 5)
Вертикальная посадка осуществляется следующим образом:
1) при приближении к месту посадки электронные регуляторы оборотов увеличивают обороты передних двигателей 7 с винтами 17, что производит наклон фюзеляжа 1 назад. Образующаяся горизонтальная составляющая (Fг) подъемной силы (Fу) будет направлена в противоположную сторону движения аппарата и следовательно снижать его скорость. Таким образом будет происходить торможение аппарата в воздухе до его полной остановки.
2) плавное уменьшение оборотов двигателей 9 позволяет осуществить вертикальную посадку на неубирающееся шасси 8.
Таким образом, при расположении в воздушном потоке вентиляторов крыльев, передней кромкой друг к другу, параллельно и симметрично относительно продольной оси устройства векторная сумма сил лобового сопротивления становится равной нулю. Это дает возможность применения аэродинамических профилей с наибольшим коэффициентом подъемной силы (Су) без учета их коэффициента лобового сопротивления (Сх).
Для повышения коэффициента подъемной силы (Су) применяется система сдува пограничного слоя.
Реализация вышеперечисленных мероприятий, направленных на повышение коэффициента подъемной силы, позволяет значительно увеличить подъемную силу (при прочих равных условиях) при минимальных энергозатратах и следовательно повысить грузоподъемность и экономичность беспилотного летательного аппарата.
Установка на беспилотный летательный аппарат широко применяемой и освоенной системы управления повышает его надежность и управляемость. Снижение издержек производства расширяет возможности применения предлагаемого БПЛА в различных целях.
Летательный аппарат может применяться как БПЛА малого радиуса действия - взлетная масса 5-50 кг, дальность действия 10-70 км, в разведывательных и ударных целях. БПЛА также может найти применение в различных целях в гражданской сфере.
| название | год | авторы | номер документа |
|---|---|---|---|
| Беспилотный летательный аппарат вертикального взлёта и посадки | 2024 |
|
RU2824222C1 |
| Беспилотный летательный аппарат вертикального взлёта и посадки | 2023 |
|
RU2805891C1 |
| Беспилотный летательный аппарат вертикального взлёта и посадки | 2023 |
|
RU2799426C1 |
| Устройство для удаления сосулек | 2024 |
|
RU2829606C1 |
| Самолёт вертикального взлёта и посадки | 2021 |
|
RU2752276C1 |
| Самолёт вертикального взлёта и посадки | 2022 |
|
RU2788231C1 |
| САМОЛЁТ ВЕРТИКАЛЬНОГОГО ВЗЛЁТА И ПОСАДКИ | 2020 |
|
RU2736793C1 |
| Экраноплан | 2021 |
|
RU2766020C1 |
| БЕСПИЛОТНЫЙ УДАРНО-РАЗВЕДЫВАТЕЛЬНЫЙ АВИАНОСИТЕЛЬ | 2023 |
|
RU2829114C1 |
| УДАРНЫЙ АВИАЦИОННЫЙ КОМПЛЕКС С БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2022 |
|
RU2810821C1 |
Изобретение относится к области авиастроения, в частности к конструкциям беспилотных летательных аппаратов. Беспилотный летательный аппарат вертикального взлета и посадки содержит фюзеляж (1), имеющий носовую часть, хвостовую часть и среднюю часть, расположенную между ними, электрические двигатели (9) с приводными валами (10), расположенные в средней части фюзеляжа, приводные валы (10), кинематически соединенные с осями вентиляторов (4) через редукторы (11). Вентиляторы (4), установленные в средней части фюзеляжа (1), создают поток текучей среды из отверстия в верхней части фюзеляжа в направлении от фюзеляжа в стороны. Крылья (2), закрытые с концов обтекателями (3), выполнены таким образом, что подъемная сила создается потоком текучей среды в направлении от фюзеляжа в стороны. БПЛА содержит систему связи и бортовую аппаратуру управления (14), устройства бортового радиоэлектронного оборудования (16), расположенные в носовой части фюзеляжа, электродвигатели с электронными регуляторами оборотов (7) и винтами (17), соединенные шлейфом с полетным контроллером. Винты выполнены с возможностью управления по тангажу, рысканию и крену на всех режимах полета. В средней части фюзеляжа расположены аккумулятор (12), шасси (8). Обеспечивается повышение надежности и управляемости БПЛА. 2 з.п. ф-лы, 5 ил.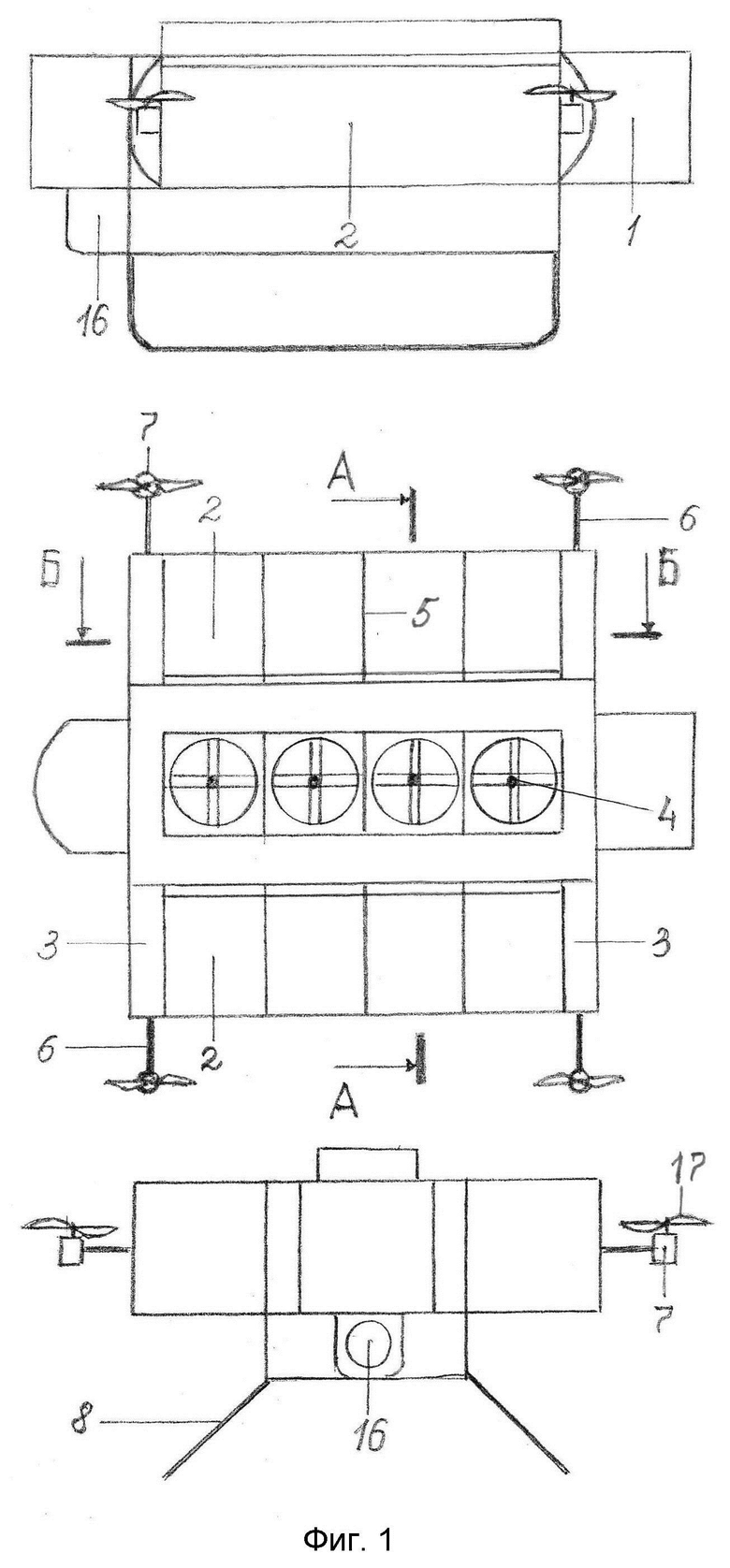
1. Беспилотный летательный аппарат вертикального взлета и посадки, содержащий в себе: фюзеляж (1), имеющий носовую часть, хвостовую часть и среднюю часть, расположенную между ними, электрические двигатели (9) с приводными валами (10), расположенные в средней части фюзеляжа, приводные валы (10), кинематически соединенные с осями вентиляторов (4) через редукторы (11), вентиляторы (4), установленные в средней части фюзеляжа (1) таким образом, что имеют возможность создавать поток текучей среды из отверстия в верхней части фюзеляжа в направлении от фюзеляжа в стороны, крылья (2), закрытые с концов обтекателями (3), выполненные таким образом, что подъемная сила создается потоком текучей среды в направлении от фюзеляжа в стороны, систему связи и бортовую аппаратуру управления (14), устройства бортового радиоэлектронного оборудования (16), расположенные в носовой части фюзеляжа, электродвигатели с электронными регуляторами оборотов (7) и винтами (17), соединенные шлейфом с полетным контроллером, выполненные с возможностью управления по тангажу, рысканию и крену на всех режимах полета, аккумулятор (12) расположенный в средней части фюзеляжа, шасси (8).
2. Аппарат по п. 1, характеризующийся тем, что в плоскости сечения профиля крыла (2) перпендикулярно передней и задней кромке установлены перегородки (5).
3. Аппарат по п. 1, характеризующийся тем, что в выполненные в крыльях каналы с щелями (13) подается сжатый воздух от компрессора с ресивером (15) таким образом, что истекающий из щелей скоростной поток сжатого воздуха направляется на верхнюю поверхность крыла по всей длине.
| Беспилотный летательный аппарат вертикального взлёта и посадки | 2023 |
|
RU2799426C1 |
| Устройство для подвода сжатого воздуха в пневматические цилиндры, например, зажимных патронов | 1956 |
|
SU112153A1 |
| FR 3008383 A1, 16.01.2015 | |||
| CN 104787329 A, 22.07.2015 | |||
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ СО ВСПОМОГАТЕЛЬНЫМИ ВОЗДУШНЫМИ ВИНТАМИ ДЛЯ УПРАВЛЕНИЯ ПОЛЕТОМ | 2021 |
|
RU2762441C1 |
| МУЛЬТИКОПТЕР С ВОЗДУШНЫМИ ВИНТАМИ РАЗЛИЧНОГО НАЗНАЧЕНИЯ | 2016 |
|
RU2718460C1 |

