ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к авиационной технике, в частности, к беспилотным летательным аппаратам вертикального взлета и посадки.
УРОВЕНЬ ТЕХНИКИ
Наиболее близким к предлагаемому техническому решению является конструкция беспилотного летательного аппарата вертикального взлета и посадки (RU 2799426, 2023, Битуев А.Г).
Известный беспилотный летательный аппарат вертикального взлета и посадки (далее - БПЛА) содержит фюзеляж с электрическими двигателями с приводными валами и редукторами расположенными в его средней части. Вентиляторы, установленные в средней части фюзеляжа, имеют возможность создавать поток воздуха из отверстия в верхней части фюзеляжа в направлении от фюзеляжа в стороны, на крылья, закрытые с концов обтекателями. Система связи и бортовая аппаратура управления расположена в носовой части фюзеляжа. Компрессор с ресивером расположены в хвостовой части фюзеляжа и имеют возможность подачи сжатого воздуха к соплам системы управления, установленными на штангах. Сопла системы управления обеспечивают управление по тангажу, рысканию и крену на всех режимах полета. Заслонки расположенные под задней кромкой крыльев и соединенные с устройствами привода сообщают БПЛА горизонтальную скорость вперед и назад. Аккумулятор расположен внизу средней части фюзеляжа. Достоинством известного технического решения является возможность вертикального взлета и посадки, большая грузоподъемность, продолжительность полета. Летательный аппарат может применяться как БПЛА малого радиуса действия - взлетная масса 5-50 кг, дальность действия 10-70 км, в разведывательных и ударных целях. Применение аккумуляторной батареи в качестве основного источника электрической энергии ограничивают массу полезной нагрузки и радиус действия БПЛА.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Технической задачей изобретения является повышение грузоподъемности и увеличение радиуса действия беспилотного летательного аппарата.
Поставленная задача решена благодаря тому, что предлагаемый беспилотный летательный аппарат вертикального взлета и посадки содержит в себе: фюзеляж (1), имеющий носовую часть, хвостовую часть и среднюю часть, расположенную между ними, электрические двигатели (9) с приводными валами (10), расположенные в средней части фюзеляжа,
приводные валы (10), кинематически соединенные с осями вентиляторов (4) через редукторы (11),
вентиляторы (4), установленные в средней части фюзеляжа (1) таким образом, что имеют возможность создавать поток текучей среды из отверстия в верхней части фюзеляжа в направлении от фюзеляжа в стороны,
крылья (2) закрытые с концов обтекателями (3), выполненные таким образом, что подъемная сила создается потоком текучей среды в направлении от фюзеляжа в стороны, крылья (2) соединенные с валами (13) моторов (12),
моторы (12), выполненные с возможностью поворота крыльев (2) относительно оси валов (13) таким образом, что в одном из положений крылья наклонены вперед, а в другом из положений наклонены назад,
систему связи и бортовую аппаратуру управления (17), устройства бортового радиоэлектронного оборудования (22), компрессор (18) с ресивером (19), расположенные в носовой части фюзеляжа,
приводной двигатель внутреннего сгорания (20) соединенный с генератором электрического тока (21), расположенные в хвостовой части фюзеляжа, винтомоторные аппараты (6) с приводами (7) установленные на штангах (5), выполненные с возможностью управления по тангажу, рысканию и крену на всех режимах полета, аккумулятор (14), топливный бак (15) расположенные в средней части фюзеляжа, шасси (8).
По сути, поставленная задача достигается следующим образом: беспилотный летательный аппарат вертикального взлета и посадки, имеющий фюзеляж, крылья, вентиляторы, электрические двигатели отличается тем, что в качестве источника электрической энергии применяется генератор с приводом от двигателя внутреннего сгорания и крылья имеют возможность быть наклонены вперед и назад.
В предпочтительных формах воплощения вышеописанного беспилотного летательного аппарата:
- компрессор (18) выполнен поршневым;
- в крыльях (2) выполнены каналы с щелями (16) таким образом, что имеют возможность создавать скоростной поток сжатого воздуха на верхнюю поверхность крыла по всей длине.
Предлагаемое изобретение иллюстрируется чертежами.
КРАТКОЕ ОПИСАНИЕ ФИГУР ЧЕРТЕЖЕЙ
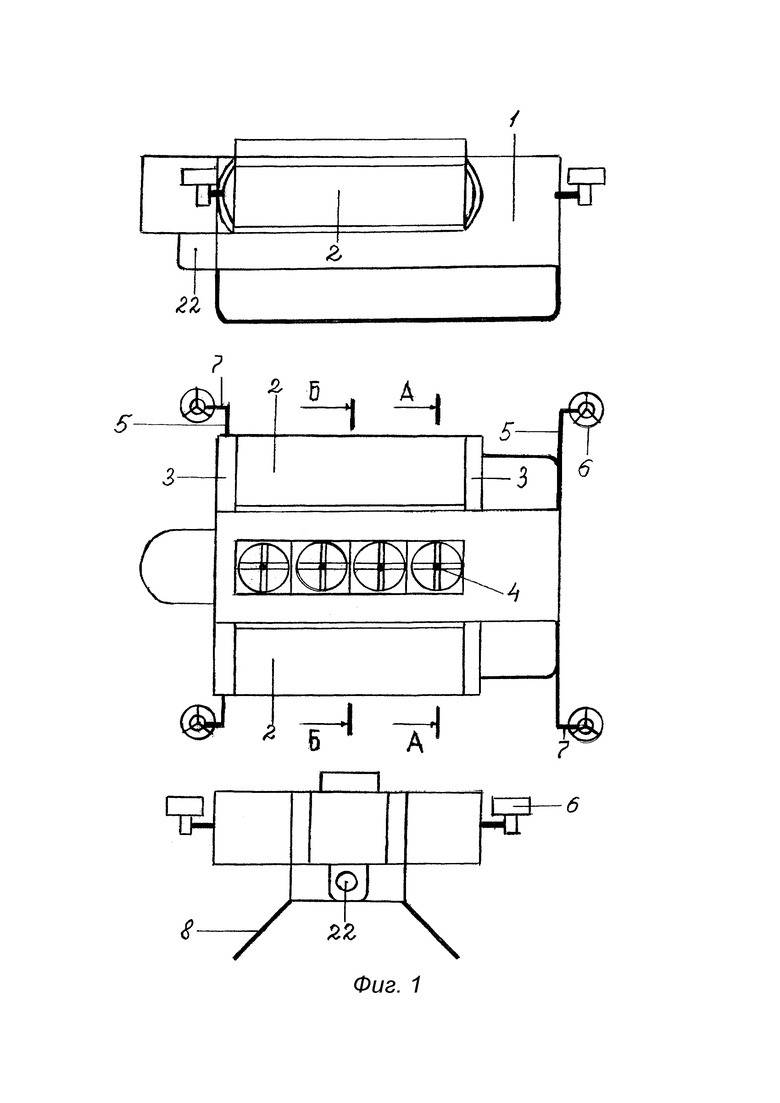
На фиг. 1 представлен общий вид летательного аппарата в трех проекциях.
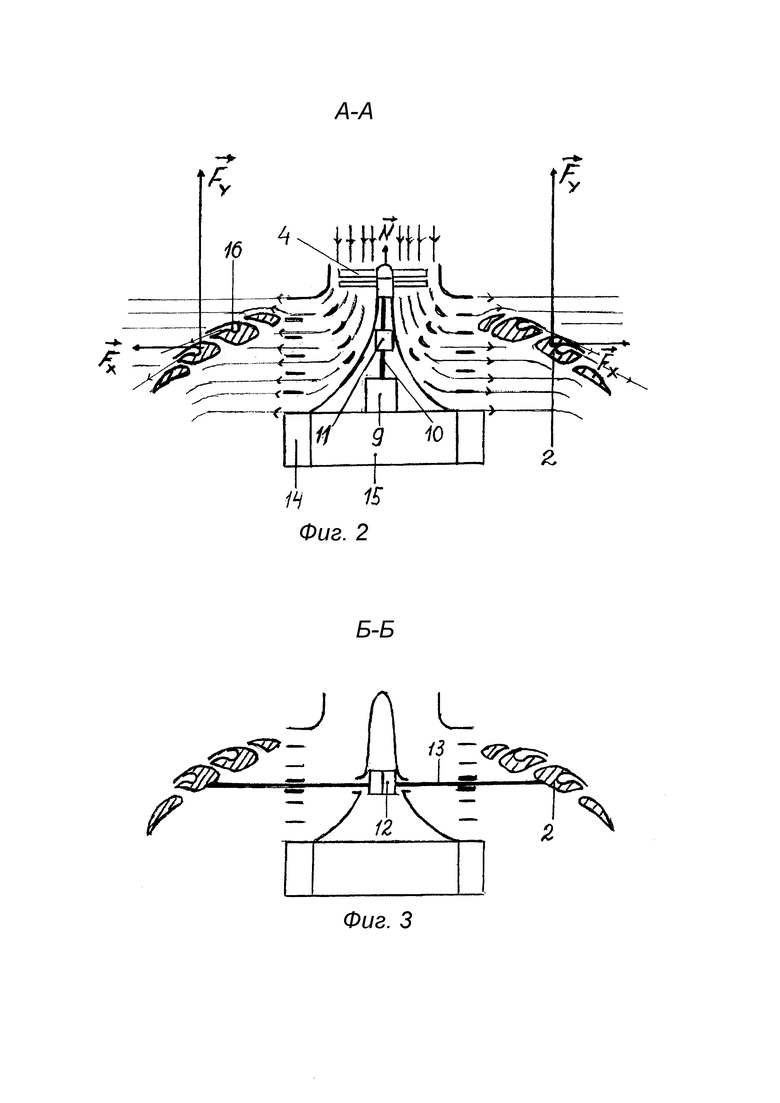
На фиг. 2 показано сечение А-А.
На фиг. 3 показано сечение Б-Б.
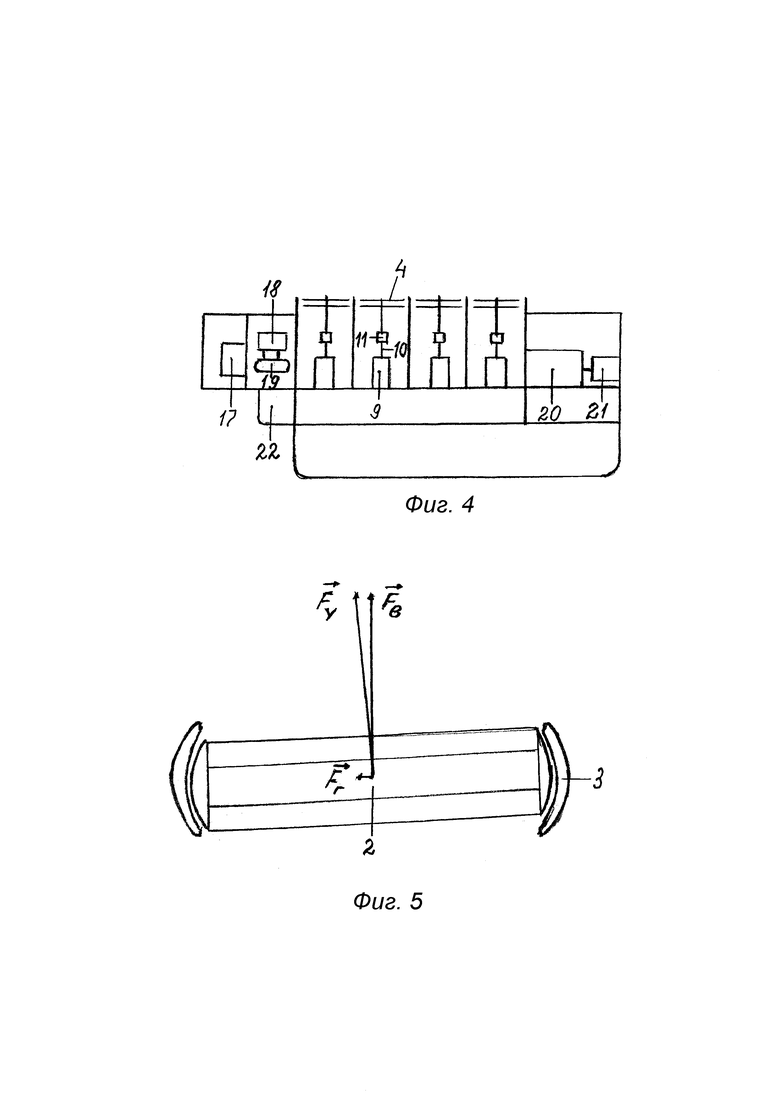
На фиг. 4 изображена кинематическая схема.
На фиг. 5 показана схема создания горизонтальной тяги.
Позициями 1-22 обозначены:
1 - фюзеляж,
2 - крыло,
3 - обтекатель крыла,
4 - вентилятор,
5 - штанга,
6 - винтомоторный аппарат,
7 - привод винтомоторного аппарата,
8 - шасси,
9 - электрический двигатель,
10 - приводной вал,
11 - редуктор,
12 -мотор,
13 - вал мотора,
14 - аккумулятор,
15 - топливный бак,
16 - канал с щелью,
17 - система связи и бортовая аппаратура управления,
18 - компрессор,
19 - ресивер,
20 - приводной двигатель внутреннего сгорания,
21 - генератор;
22 - устройства бортового радиоэлектронного оборудования.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Как показано на фиг. 1 БПЛА содержит:
1 - фюзеляж,
2 - крылья,
3 - обтекатели крыльев,
4 - вентиляторы,
5 - штанги,
6 - винтомоторные аппараты,
7 - приводы винтомоторных аппаратов,
22 - устройства бортового радиоэлектронного оборудования,
8 - шасси.
Как показано на фиг. 2 по бокам в средней части фюзеляжа 1 передней кромкой друг к другу, параллельно и симметрично относительно продольной оси аппарата установлены крылья 2 закрытые с концов обтекателями 3. Электрические двигатели 9 с приводными валами 10 через редукторы 11 передают крутящий момент двухступенчатым вентиляторам с роторами противоположного вращения 4. В крыльях 2 по всей длине выполнены каналы с щелями 16, через которые истекает скоростной плоский поток сжатого воздуха на верхнюю поверхность крыла по всей длине. При этом кривизна аэродинамического профиля обеспечивает отклонение части воздушного потока вентиляторов вниз.
Как показано на фиг. 3 посередине между вентиляторами 4 в пространстве между стенками воздуховодов установлены моторы 12, валы 13 которых соединены с крыльями 2.
Как показано на фиг. 4 в носовой части фюзеляжа 1 расположены система связи и бортовая аппаратура управления 17, устройства бортового радиоэлектронного оборудования 22, компрессор 18 с ресивером 19 обеспечивающий подачу по трубопроводам сжатого воздуха. В средней части фюзеляжа последовательно установлены электрические двигатели 9 с приводными валами 10, кинематически соединенными с осями вентиляторов 4 через редукторы 11. В хвостовой части фюзеляжа расположены приводной двигатель внутреннего сгорания 20 соединенный с генератором 21.
Как показано на фиг. 5 горизонтальная тяга (Fг) создается при наклоне крыльев 2.
Винтомоторный аппарат 6 системы управления включает в себя воздушный винт в кольце установленный на валу электродвигателя и соединенный с приводам 7. Винтомоторные аппараты установлены попарно на штангах 5 по бокам фюзеляжа. Приводы 7 имеют возможность наклона винтомоторных аппаратов 6 влево и вправо относительно оси привода. Изменением оборотов винтов и наклоном винтомоторных аппаратов обеспечивается управление по тангажу, рысканию и крену на всех режимах полета. (Фиг. 1.)
Вертикальный взлет осуществляется следующим образом:
1) после запуска приводного двигателя 20 соединенного с генератором электрического тока 21 производится преобразование механической энергии в электрическую энергию. (Фиг. 4);
2) после подачи электрической энергии электрическим двигателям 9 приводные валы 10 передают крутящий момент через редукторы 11 вентиляторам 4. Воздушный поток вентиляторов обтекая крылья 2 создает подъемную силу (Fy) и силу лобового сопротивления (Fx) и далее частично отклоняясь вниз создает силу тяги (N).
В каналы с щелями 16 подается сжатый воздух от компрессора 18. Плоский скоростной поток сжатого воздуха истекает на верхнюю поверхность крыльев по всей длине. Отраженный от поверхности отклоненный воздушный поток создает избыточное давление под крылом. (Фиг. 2);
3) как только вертикальная тяга, как сумма подъемных сил крыльев (Fy) и силы тяги вентиляторов (N), станет больше силы тяжести произойдет отрыв БПЛА от поверхности и начнется вертикальный взлет.
Осуществление крейсерского режима полета:
1) после набора определенной высоты моторы 12 поворотом валов 13 синхронно наклоняют крылья 2 на одинаковый угол вперед (фиг. 3, фиг. 5). При наклоне крыльев вперед образуется горизонтальная составляющая (Fг) подъемной силы (Fy) которая и сообщает аппарату горизонтальную скорость (фиг. 5). Наклон крыльев уменьшает вертикальную составляющую (Fв) подъемной силы (Fy), что может привести к потере высоты полета аппарата. Чтобы этого не произошло на аппарате используется автоматическая система, которая одновременно с увеличением угла наклона крыльев подает команду на увеличение оборотов двигателей. Увеличение оборотов двигателя повышает скорость воздушного потока вентиляторов и следовательно увеличивает подъемную силу. Тем самым исключается уменьшение вертикальной составляющей (Fв) подъемной силы. (Фиг. 5.)
Вертикальная посадка осуществляется следующим образом:
1) при приближении к месту посадки моторы 12 поворотом валов 13 синхронно наклоняют крылья 2 на одинаковый угол назад. Образующаяся горизонтальная составляющая (Fг) подъемной силы (Fy) будет направлена в противоположную сторону движения аппарата и следовательно снижать его скорость.
Таким образом будет происходить торможение аппарата в воздухе до его полной остановки. После остановки, крылья 2 моторами 12 переводятся в исходное (горизонтальное) положение;
2) плавное уменьшение оборотов двигателей 9 позволяет осуществить вертикальную посадку на неубирающееся шасси 8.
Таким образом, при расположении в воздушном потоке вентиляторов крыльев, передней кромкой друг к другу, параллельно и симметрично относительно продольной оси устройства векторная сумма сил лобового сопротивления становится равной нулю. Это дает возможность применения аэродинамических профилей с наибольшим коэффициентом подъемной силы (Су) без учета их коэффициента лобового сопротивления (Сх).
Для повышения коэффициента подъемной силы (Су) применяется система сдува пограничного слоя.
Реализация вышеперечисленных мероприятий, направленных на повышение коэффициента подъемной силы, позволяет значительно увеличить подъемную силу (при прочих равных условиях) при минимальных энергозатратах и, следовательно, повысить грузоподъемность и экономичность летательного аппарата.
Применение генератора с приводом от двигателя внутреннего сгорания в качестве источника электрической энергии увеличивает продолжительность полета и радиус действия.
При выходе из строя приводного двигателя/генератора аппарат переходят на электроснабжение от аккумулятора, что позволяет совершить экстренную посадку. Предлагаемый летательный аппарат может применяться как БПЛА среднего радиуса действия - взлетная масса 50-100 кг, дальность действия 70-150 км, в разведывательных и ударных целях.
БПЛА также может найти применение в различных целях в гражданской сфере.
| название | год | авторы | номер документа |
|---|---|---|---|
| Беспилотный летательный аппарат вертикального взлёта и посадки | 2023 |
|
RU2799426C1 |
| Беспилотный летательный аппарат вертикального взлёта и посадки | 2023 |
|
RU2805891C1 |
| Устройство для удаления сосулек | 2024 |
|
RU2829606C1 |
| Беспилотный летательный аппарат вертикального взлёта и посадки | 2024 |
|
RU2826651C1 |
| Самолёт вертикального взлёта и посадки | 2021 |
|
RU2752276C1 |
| Самолёт вертикального взлёта и посадки | 2022 |
|
RU2788231C1 |
| САМОЛЁТ ВЕРТИКАЛЬНОГОГО ВЗЛЁТА И ПОСАДКИ | 2020 |
|
RU2736793C1 |
| Экраноплан | 2021 |
|
RU2766020C1 |
| Беспилотный летательный аппарат вертикального взлета и посадки | 2017 |
|
RU2716391C2 |
| Беспилотный летательный аппарат вертикального взлета и посадки | 2021 |
|
RU2767390C1 |
Изобретение относится к области авиации, в частности к конструкциям беспилотных летательных аппаратов (БПЛА). Беспилотный летательный аппарат вертикального взлета и посадки содержит фюзеляж (1), имеющий носовую, хвостовую и среднюю части, электрические двигатели (9) с приводными валами (10), расположенные в средней части фюзеляжа. Приводные валы (10) кинематически соединены с осями вентиляторов (4) через редукторы (11). Вентиляторы (4), установленные в средней части фюзеляжа (1), имеют возможность создавать поток текучей среды из отверстия в верхней части фюзеляжа в направлении от фюзеляжа в стороны. Крылья (2), закрытые с концов обтекателями (3), выполнены таким образом, что подъемная сила создается потоком текучей среды в направлении от фюзеляжа в стороны. Крылья (2) соединены с валами (13) моторов (12) для поворота крыльев (2) относительно оси валов (13). Двигатель внутреннего сгорания (20) соединен с генератором электрического тока (21). БПЛА имеет винтомоторные аппараты (6) с приводами (7), установленные на штангах (5), для управления по тангажу, рысканию и крену на всех режимах полета. Обеспечивается повышение грузоподъемности и увеличение радиуса действия БПЛА. 2 з.п. ф-лы, 5 ил.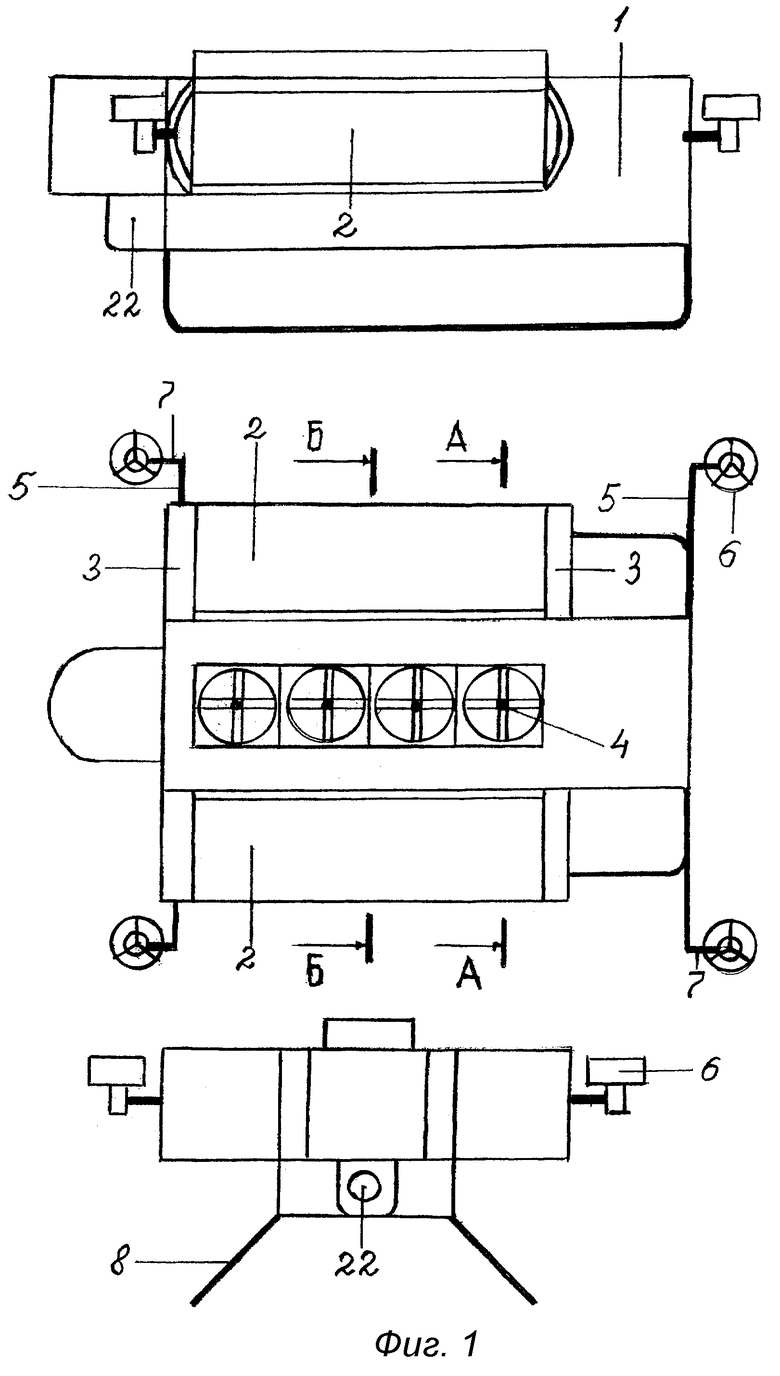
1. Беспилотный летательный аппарат вертикального взлета и посадки, содержащий в себе: фюзеляж (1), имеющий носовую часть, хвостовую часть и среднюю часть, расположенную между ними,
электрические двигатели (9) с приводными валами (10), расположенные в средней части фюзеляжа,
приводные валы (10), кинематически соединенные с осями вентиляторов (4) через редукторы (11),
вентиляторы (4), установленные в средней части фюзеляжа (1) таким образом, что имеют возможность создавать поток текучей среды из отверстия в верхней части фюзеляжа в направлении от фюзеляжа в стороны,
крылья (2), закрытые с концов обтекателями (3), выполненные таким образом, что подъемная сила создается потоком текучей среды в направлении от фюзеляжа в стороны, крылья (2), соединенные с валами (13) моторов (12),
моторы (12), выполненные с возможностью поворота крыльев (2) относительно оси валов (13) таким образом, что в одном из положений крылья наклонены вперед, а в другом из положений наклонены назад,
систему связи и бортовую аппаратуру управления (17), устройства бортового радиоэлектронного оборудования (22), компрессор (18) с ресивером (19), расположенные в носовой части фюзеляжа,
приводной двигатель внутреннего сгорания (20), соединенный с генератором электрического тока (21), расположенные в хвостовой части фюзеляжа, винтомоторные аппараты (6) с приводами (7), установленные на штангах (5), выполненные с возможностью управления по тангажу, рысканию и крену на всех режимах полета, аккумулятор (14), топливный бак (15), расположенные в средней части фюзеляжа, шасси (8).
2. Аппарат по п. 1, характеризующийся тем, что в нем компрессор (18) выполнен поршневым.
3. Аппарат по п. 1, характеризующийся тем, что в крыльях (2) выполнены каналы с щелями (16) таким образом, что имеют возможность создавать скоростной поток сжатого воздуха на верхнюю поверхность крыла по всей длине.
| Беспилотный летательный аппарат вертикального взлёта и посадки | 2023 |
|
RU2799426C1 |
| Самолёт вертикального взлёта и посадки | 2021 |
|
RU2752276C1 |
| МНОГОВИНТОВОЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2014 |
|
RU2567496C1 |
| Устройство для подвода сжатого воздуха в пневматические цилиндры, например, зажимных патронов | 1956 |
|
SU112153A1 |
| FR 3008383 A1, 16.01.2015 | |||
| CN 104787329 A, 22.07.2015. | |||

