ОБЛАСТЬ ТЕХНИКИ
[0001] Раскрытые варианты реализации относятся к области летательных аппаратов, основанных на использовании воздушных винтов, в частности к мультикоптерным летательным аппаратам с воздушными винтами различного назначения.
УРОВЕНЬ ТЕХНИКИ
[0002] Современные летательные аппараты или воздушные суда могут быть приведены в движение многими различными способами. Недостаток многовинтовых летательных аппаратов (мультикоптеров) состоит в необходимости использования сложных передаточных систем для передачи усилия на воздушные винты и управления их вращением. Создание эффективных систем электронного управления электродвигателями и аккумуляторными батареями высокой емкости позволило разработать малогабаритные конструкции таких мультикоптеров с дистанционным радиоуправлением. Однако все попытки увеличить общие габаритные размеры и мощность двигателей в таких конструкциях натолкнулись на проблемы масштабирования. Решение этой технической задачи затрудняют медленное срабатывание больших электродвигателей или двигателей внутреннего сгорания для обеспечения маневрирования корпуса мультикоптера, а именно для поворота влево и вправо, осуществления крутых подъемов, зависания и снижения, которые требуют быстрого увеличения оборотов двигателя для одних винтов и уменьшения для других. Подобного рода маневрирование может потребовать быстрых изменений в работе двигателя воздушного винта, при этом в больших двигателях скорость срабатывания вращающихся элементов двигателя и самих винтов уменьшается в соответствии с законом квадрата-куба. По этой причине устройства, которые могут быть легко выполнены в малых размерах, на практике оказывается сложно реализовать в случае больших размеров и значительного веса винта и двигателя, а также проблем с инерцией.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[0003] В настоящем изобретении предложены системы и способы для создания мультикоптера и управления им. Мультикоптер содержит шасси, на котором установлены по меньшей мере два подъемных двигателя и по меньшей мере четыре управляющих двигателя, причем указанные по меньшей мере два подъемных двигателя имеют каждый подъемный винт, указанные по меньшей мере четыре управляющих двигателя имеют каждый управляющий винт, а подъемные винты и управляющие винты расположены в одной плоскости или в параллельных плоскостях, при этом длина подъемных винтов по меньшей мере вдвое больше длины управляющих винтов. Система также содержит компьютер, установленный на шасси с возможностью обмена данными с управляющими двигателями, источник электропитания, установленный на шасси и соединенный с управляющими двигателями, и антенны, установленные на шасси с возможностью обмена данными с компьютером. Некоторые варианты реализации дополнительно содержат элероны, установленные на шасси под подъемными винтами. В некоторых вариантах реализации источник электропитания представляет собой аккумуляторную батарею или генератор. В некоторых вариантах реализации шасси имеет периферию, в пределах которой находятся подъемные и управляющие винты. Еще в некоторых вариантах реализации на шасси могут быть установлены датчики нагрузки с возможностью обмена данными с компьютером, который выполнен с возможностью расчета неравномерности распределения нагрузки и выдачи предупредительного сообщения о неравномерном распределении нагрузки. В некоторых вариантах реализации на шасси может быть установлен распылитель с возможностью обмена данными с компьютером, а в отдельных случаях на шасси могут быть установлены зацеп и лебедка. В некоторых вариантах реализации шасси представляет собой открытую рамную конструкцию, изготовленную из алюминиевых стержней. В отдельных примерах подъемные двигатели представляют собой по меньшей мере одно из следующих устройств: электродвигатель, двигатель внутреннего сгорания и газотурбинный двигатель. В некоторых вариантах реализации компьютер выполнен с возможностью обмена данными с навигационной системой и управления вращением управляющих винтов для обеспечения маневрирования летательного аппарата согласно путевым точкам навигационной системы. В некоторых вариантах реализации длина подъемных винтов составляет по меньшей мере один метр.
[0004] Системы и способы для приведения в действие мультикоптерных систем, описанные в данном документе, содержат шасси, на котором установлены по меньшей мере два подъемных двигателя и по меньшей мере четыре управляющих двигателя, причем указанные по меньшей мере два установленных подъемных двигателя имеют каждый подъемный воздушный винт, указанные по меньшей мере четыре управляющих двигателя имеют каждый управляющий винт, подъемные винты и управляющие винты расположены в параллельных плоскостях, а подъемные винты имеют длину, которая по меньшей мере вдвое больше длины указанных управляющих винтов. Система также содержит компьютер, установленный на шасси с возможностью обмена данными с управляющими двигателями, аккумуляторную батарею, установленную на шасси и соединенную с управляющими двигателями, и антенны, установленные на шасси с возможностью обмена данными с компьютером. В некоторых примерах используют управляющие системы с шифрованием данных.
[0005] Иные признаки и преимущества настоящего изобретения будут ясны из нижеследующих раздела «Осуществление изобретения» и чертежей, которые иллюстрируют в качестве примера различные особенности вариантов реализации настоящего изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0006] Приведенные ниже раздел «Осуществление изобретения» и чертежи, на которых одинаковыми ссылочными номерами обозначены схожие конструктивные элементы, необходимы для лучшего понимания вариантов реализации, описанных в данном документе.
[0007] На фиг. 1 схематически показан в качестве примера мультикоптер в соответствии с нижеописанными аспектами настоящего изобретения.
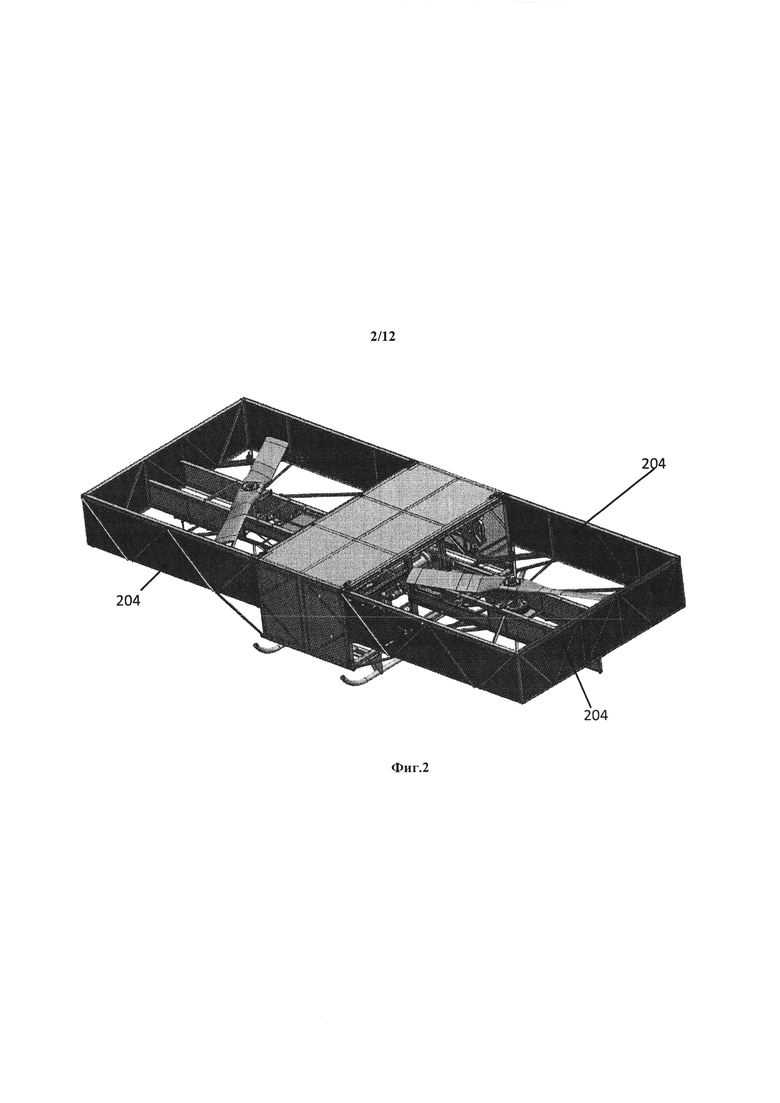
[0008] На фиг. 2 схематически показан в качестве примера еще один мультикоптер в соответствии с нижеописанными аспектами настоящего изобретения.
[0009] На фиг. 3 схематически показан в качестве примера еще один мультикоптер в соответствии с нижеописанными аспектами настоящего изобретения.
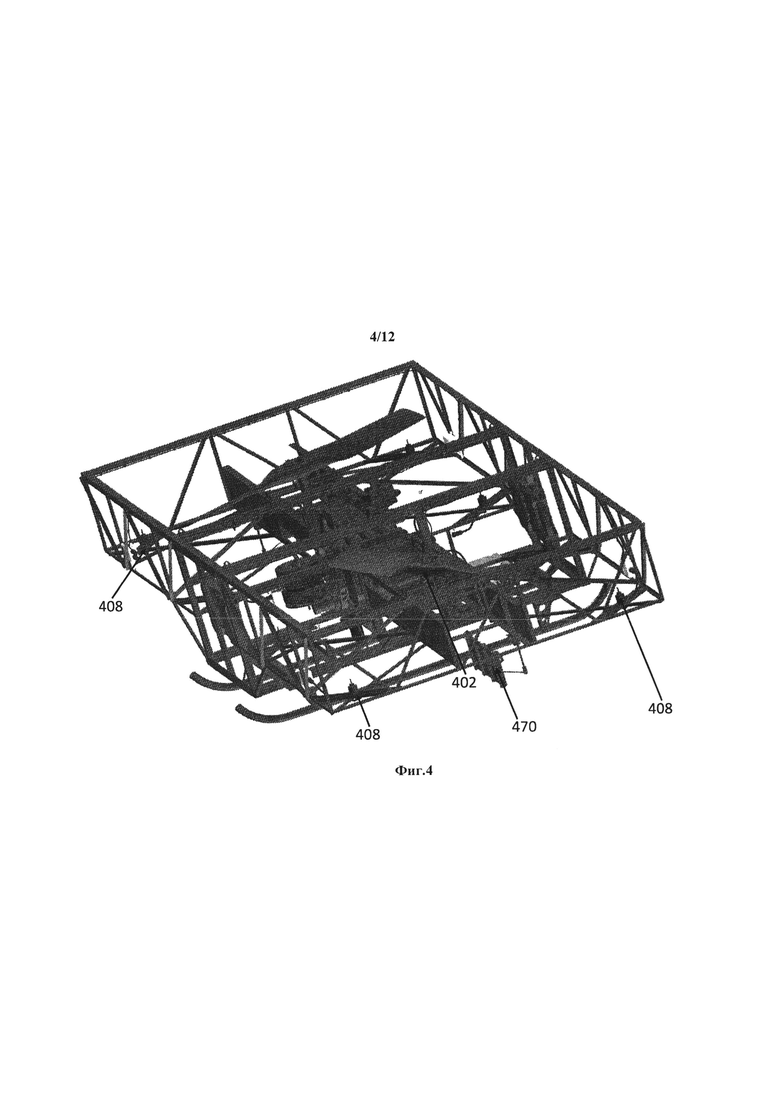
[0010] На фиг. 4 схематически показан в качестве примера еще один мультикоптер в соответствии с нижеописанными аспектами настоящего изобретения.
[0011] На фиг. 5 показана блок-схема процесса работы в режиме полета в соответствии с нижеописанными аспектами настоящего изобретения.
[0012] На фиг. 6 схематически проиллюстрирован в качестве примера процесс работы в режиме полета в соответствии с нижеописанными аспектами настоящего изобретения.
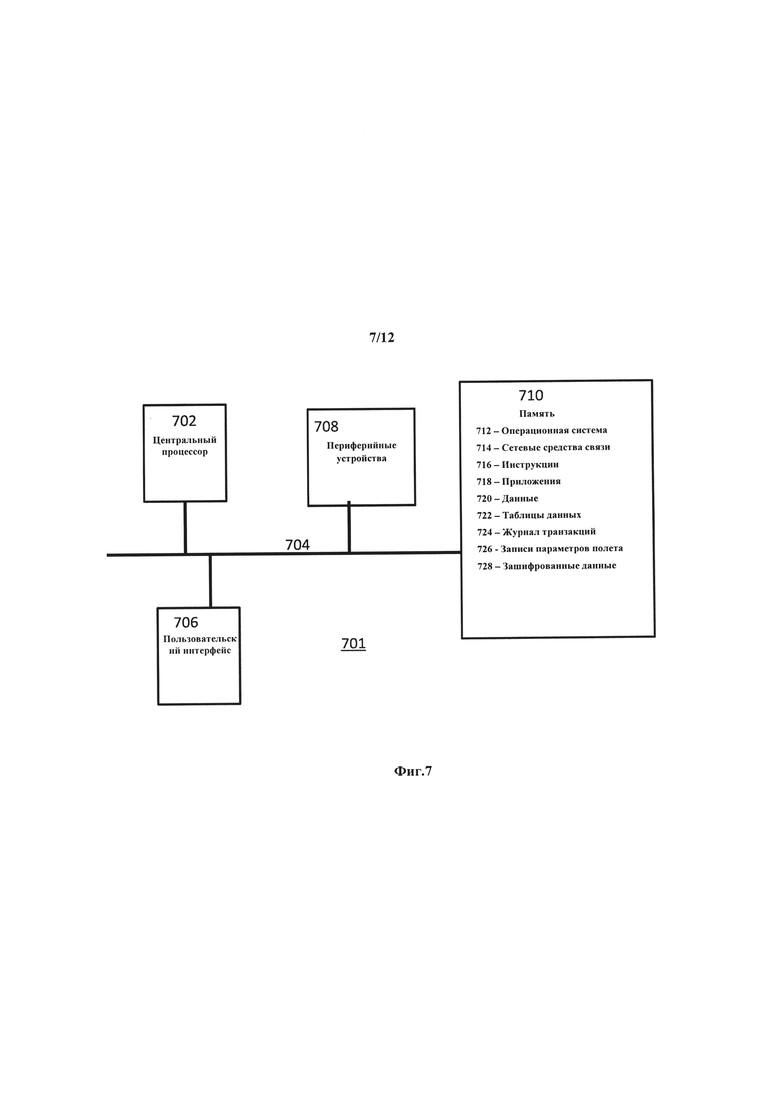
[0013] На фиг. 7 показано в качестве примера компьютерное аппаратное обеспечение в соответствии с нижеописанными аспектами настоящего изобретения.
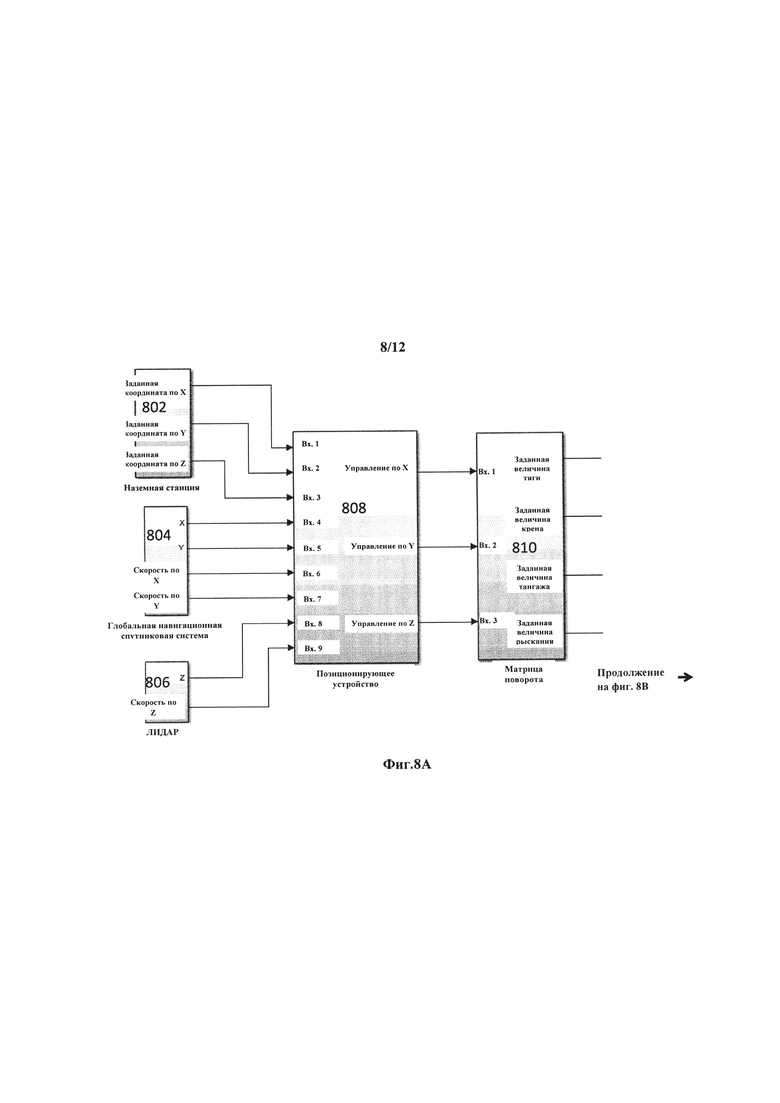
[0014] На фиг. 8А и 8В схематически показана в качестве примера последовательность управляющих команд в соответствии с нижеописанными аспектами настоящего изобретения.
[0015] На фиг. 9 показана в качестве примера блок-схема в соответствии с нижеописанными аспектами настоящего изобретения.
[0016] На фиг. 10 схематически показан в качестве примера груз в соответствии с нижеописанными аспектами настоящего изобретения.
[0017] На фиг. 11 более подробно схематически показан в качестве примера груз в соответствии с нижеописанными аспектами настоящего изобретения.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0018] Ниже подробно описаны варианты реализации настоящего изобретения, показанные на прилагаемых чертежах. Некоторые конкретные особенности описаны ниже исключительно для обеспечения надлежащего понимания сущности настоящего изобретения, раскрытой в данном документе. Однако специалисту должно быть ясно, что настоящее изобретение может быть реализовано и без этих конкретных особенностей. Кроме того, отдельные варианты реализации, описанные в данном документе, приведены исключительно в качестве примера, при этом объем настоящего изобретения не ограничен этими отдельными вариантами реализации. Далее, для упрощения понимания аспектов вариантов реализации настоящего изобретения не были подробно описаны известные структуры данных, протоколы синхронизации, программные операции, процедуры и компоненты.
[0019] Обзор
[0020] В прошлом столетии для подъема людей с поверхности земли в небо использовали различные летательные аппараты. Некоторые аппараты пилотировались людьми, другие имели дистанционное управление. С развитием технологий стало возможным по-новому использовать проверенные способы полета. Например, в системах и способах, описанных в данном документе, предусмотрены новые способы использования летательных аппаратов с винтами (мультикоптеров) для обеспечения подъема и управления. Благодаря достижениям компьютерной техники мультикоптер, описанный в данном документе, может успешно выполнять полет в стабильном режиме в различных условиях. Кроме того, благодаря достижениям в области электропитания от аккумуляторных батарей такие мультикоптеры могут содержать двигатели с электропитанием вместо двигателей, работающих исключительно на энергии реактивной тяги, энергии внутреннего сгорания или энергии, полученной другими способами.
[0021] Как описано выше, небольшие мультикоптеры диаметром менее одного метра использовались любителями для совершения полетов, а также для получения фотографий и их отправки во время полета. Однако в отдельных областях промышленности использование небольших мультикоптеров может быть невыгодным. В некоторых областях промышленности могут быть необходимы большие летательные аппараты шириной более двух метров, выполненные с возможностью подъема большой полезной нагрузки и полета на дальние расстояния. В таких примерах пилотируемый или беспилотный летательный аппарат может потребовать наличия двигателя значительных размеров и мощности, а также наличия больших дисков несущего винта для создания необходимой подъемной силы. Кроме того, такими двигателями и их воздушными винтами может быть более сложно управлять в импульсном режиме взрывного прироста мощности и скоростного разгона и аналогичного импульсного и резкого снижения мощности и скорости. Однако именно этот режим необходим для обеспечения точного и высокоэффективного управления мультикоптером и ответного изменения им своей пространственной ориентации во время активного полета и зависания. В этом проявляется максимальное расхождение между функцией создания подъемной силы винтов мультикоптера и функцией создания крутящих моментов для изменения пространственной ориентации корпуса мультикоптера и режима полета с точки зрения местонахождения корпуса мультикоптера по отношению к линии перемещения.
[0022] В вариантах реализации, описанных в данном документе, вышеописанные проблемы решены путем использования винтов нескольких типов и/или нескольких размеров разного функционального назначения, при этом все винты могут изменять свою скорость вращения и, таким образом, управлять создаваемой ими силой тяги. В некоторых вариантах реализации различные винты ориентированы в одном и том же общем направлении по отношению ко всей раме или шасси летательного аппарата. Таким образом, в отличие от винтов, наклоненных в одну сторону, и других винтов, наклоненных в другую сторону, подъемные и управляющие винты могут оказывать воздействие на тангаж, рыскание и/или крен мультикоптера путем изменения своих скоростей.
[0023] Могут быть использованы мультикоптеры с винтами различного назначения, которые содержат группу винтов, состоящую из некоторого количества винтов различного функционального назначения. Винты могут быть разделены по меньшей мере на два типа в зависимости от их целевого назначения, а именно на подъемные винты, развивающие основную горизонтальную силу тяги и создающие подъемную силу, и маневрирующие и/или управляющие винты, задающие пространственную ориентацию корпуса мультикоптера и его положение по отношению к линии перемещения, в том числе развивающие дополнительную вспомогательную горизонтальную подъемную силу тяги. Технический результат применения этих технических решений состоит в создании мультикоптера, без затруднения несущего существенную полезную нагрузку благодаря высокой грузоподъемности, при этом таким мультикоптером легко управлять, и он может быстро и легко изменить свое пространственное положение.
[0024] На фиг. 1 показан примерный перспективный вид такого мультикоптера. В этом примере показаны два больших воздушных винта 102, установленных на шасси (или корпусе или раме) 106. Два больших подъемных воздушных винта 102 могут быть использованы для создания полной подъемной силы, необходимой для отрыва мультикоптера от земли и его зависания на некоторой высоте. В некоторых вариантах реализации эти два подъемных винта совершают вращения в противоположных направлениях. В некоторых иллюстративных вариантах реализации подъемные винты 102 размещены в одной и той же плоскости по отношению к шасси 106. Каждый из подъемных винтов 102 имеет собственный электродвигатель, собственные средства управления полетом и может управляться любым из различных компьютеров в мультикоптере. Такие средства управления могут регулировать скорость и иные показатели каждого подъемного винта 102, а также могут отслеживать синхронизацию этих двух винтов по отношению друг к другу. В некоторых других вариантах реализации подъемные винты 102 совместно используют основной двигатель, при этом их приводят во вращение посредством системы валов или ременной системы. Основной подъемный двигатель как правило представляет собой двигатель внутреннего сгорания, электродвигатель, газотурбинный двигатель или гибридный двигатель. В вариантах реализации с двигателем внутреннего сгорания или газотурбинным двигателем отдельные винты скорее всего не смогут использовать свои собственные двигатели, однако могут совместно использовать основной двигатель, присоединенный к трансмиссии, которая приводит в действие эти винты.
[0025] В некоторых примерах количество подъемных винтов 102 может составлять два, три, четыре, пять, шесть, семь, восемь или более штук. Это количество может быть обусловлено предполагаемым использованием мультикоптера и его полезной нагрузкой.
[0026] Шасси 106 мультикоптера представляет собой коробчатую раму, которая окружает винты и их дуги. Другими словами, в некоторых иллюстративных вариантах реализации шасси 106 охватывает все компоненты мультикоптера, в том числе все винты. Данная конструкция обеспечивает некоторый уровень безопасности, поскольку в полете дуги винтов мультикоптера могут быть защищены от сооружений периферией самого шасси 106. Столкновение со столбом или иным объектом в полете может привести только к удару о шасси 106, а не о любой из винтов, что могло бы повлиять на полет или даже вывести из строя мультикоптер. В некоторых вариантах реализации в пределах периферии шасси также могут находиться и малые управляющие винты 108, что обеспечивает их защиту во время работы, транспортировки и хранения.
[0027] Шасси 106 имеет наружное конструктивное исполнение и низкий профиль, которые позволяют мультикоптеру работать в небольших пространствах и облегчают транспортировку и хранение этого мультикоптера в нерабочем состоянии. Коробчатая рама, показанная на фиг. 1, представляет собой открытую рамную конструкцию, образованную из перекладин, трубок, двутавровых балок и/или стержней из металла, такого как алюминий или сталь. Может быть использовано шасси с конструкцией любого вида, при этом показанные на чертежах трубки не следует считать ограничением. Такая рама может быть выполнена из любого материала, такого как углеродное волокно, стекловолокно, пластмасса, многослойные композиты или из другого материала, являющегося легким и прочным. Шасси любой формы может быть использовано для размещения в нем винтов и механизмов, при этом конструкция прямоугольной формы показана на фиг. 1 исключительно в качестве примера. Может быть использовано шасси иной формы, такой как квадрат, круг, эллипс, шестиугольник, восьмиугольник и т.д. Количество и места расположения подъемных и управляющих винтов могут оказывать влияние на форму конструкции всего мультикоптера.
[0028] На фиг. 1, иллюстрирующем шасси 106, показан основной корпус 110, в котором на шасси могут быть установлены различные компоненты, такие как аккумуляторные батареи, антенны и компьютеры. Такой корпус может иметь любую форму, при этом он не обязательно представляет собой корпус, обшитый металлическими панелями, как это показано на чертежах. Корпус 110 может быть окружен прозрачной пластмассой, при этом этот корпус может быть выполнен открытым или может быть полностью отделен от оболочки из пластмассы или металла. В качестве посадочного устройства могут быть использованы не только двое полозьев 112, показанных на фиг. 1. В мультикоптере могут быть использованы различные лыжи, колеса, понтоны, ролики или посадочные приспособления иных типов.
[0029] На фиг. 1 показано, что в дополнение к большим подъемным винтам 102 в пределах шасси также размещена группа малых управляющих винтов 108. В некоторых вариантах реализации управляющие винты 108 размещены на краях шасси, но все еще находятся в пределах периферии этого шасси, например размещены в углах, как показано на фиг. 1. В других вариантах реализации вокруг подъемных винтов 102 в любом месте могут быть установлены дополнительные управляющие винты. В некоторых вариантах реализации настоящего изобретения управляющие винты могут быть установлены за пределами шасси. В качестве опоры для таких управляющих винтов могут быть использованы держатель, рама или платформа. Не следует считать, что описание управляющих винтов, установленных внутри шасси или рамной конструкции, является ограничением. В некоторых вариантах реализации количество управляющих винтов 108 превышает количество больших подъемных винтов 102 в два раза. В некоторых вариантах реализации количество управляющих винтов может превышать количество подъемных винтов в четыре раза. В других вариантах реализации количество управляющих винтов может превышать количество подъемных винтов в иное количество раз. В некоторых вариантах реализации управляющие винты 108 и подъемные винты 102 установлены в одной и той же плоскости, в целом в одной и той же плоскости и/или в параллельных плоскостях по отношению к шасси 106. Другими словами, подъемные винты 102 и управляющие винты 108 могут быть ориентированы не в разгых направлениях, а в одном и том же направлении или в целом в одном и том же направлении по отношению к шасси. В таких вариантах реализации вращение управляющих винтов с разными скоростями может изменять ориентацию, тангаж, рыскание и/или крен мультикоптера. В некоторых примерах управляющие винты 108 установлены в плоскостях, отличных от плоскостей, в которых установлены подъемные винты 102, например немного выше плоскости, в которой установлены подъемные винты 102, если смотреть на мультикоптер сбоку, или ниже этой плоскости, или выше и ниже этой плоскости.
[0030] В некоторых вариантах реализации подъемные винты имеют размеры и вес, которые по меньшей мере в два раза больше размеров и веса управляющих винтов. В некоторых вариантах реализации потенциально возможная сила тяги, обеспечиваемая подъемными винтами, по меньшей мере вдвое больше потенциально возможной силы тяги, обеспечиваемой управляющими винтами.
[0031] На фиг. 2 показан еще один перспективный вид примера мультикоптера, при этом в этом мультикоптере отдельные участки сторон шасси с открытой рамой покрыты необязательным облицовочным покрытием 204 или обшивкой. Такой пример покрытия может быть использован для направления воздуха к винтам и улучшения летных характеристик, в том числе характеристик зависания, а также для уменьшения боковых потоков, которые могут уменьшить подъемную силу любого из винтов. Шасси с открытой рамой может быть покрыто материалом любого вида, например тканью, алюминием, углеродным волокном, оргстеклом или другим материалом, для формирования стенки. Стенки также могут содержать датчики, провода, антенны или другие компоненты мультикоптера, как описано в данном документе.
[0032] Основные сведения о воздушных винтах
[0033] Для решения возможных проблем, связанных с управлением большими мультикоптерами, в особенности мультикоптерами с винтами, расположенными в одной плоскости или в параллельных плоскостях, в вариантах реализации, описанных в данном документе, воздушные винты, установленные на мультикоптере, подразделяются по размерам на большие винты и малые винты. Такое разделение может позволять мультикоптеру создавать большую часть подъемной тяги с использованием больших винтов, которым не нужно слишком часто изменять скорость своего вращения. Кроме того, такое подразделение может позволять мультикоптеру создавать большую часть управляющей тяги с использованием винтов малого размера, которые могут изменять скорость своего вращения гораздо чаще подъемных винтов. Такие подъемные винты могут иметь длину, составляющую один метр, или больше. Управляющие винты могут иметь длину, составляющую половину или менее половины от длины подъемных винтов.
[0034] Такие подъемные винты и управляющие винты могут быть установлены в любом из различных мест на мультикоптере, показанных в качестве примера на фиг. 1, или могут иметь другую схему расположения для поддержания соответствующего равновесия. Кроме того, такое расположение может позволять подъемным винтам создавать для мультикоптера основную горизонтальную тягу и большую часть подъемной тяги. Кроме того, такое расположение может позволять управляющим винтам создавать тягу маневрирования, например для управления пространственной ориентацией мультикоптера и его положением по отношению к линии перемещения в процессе работы, и дополнительно создавать вспомогательную горизонтальную тягу для мультикоптера. Управляющие винты благодаря своим малым размерам могут быстрее изменять скорость вращения и корректировать навигацию, ориентацию, тангаж, рыскание и крен мультикоптера.
[0035] В некоторых вариантах реализации такие винты могут быть расположены в одной плоскости или параллельных плоскостях в шасси мультикоптера. При таком расположении валы винтов будут размещены в целом параллельно друг другу в пределах шасси мультикоптера, а лопасти винтов будут размещены в целом параллельно друг другу. Кроме того, для обеспечения такого расположения необходимо, чтобы каждый винт был расположен на расстоянии от другого винта для обеспечения возможности свободного вращения этих винтов и изменения скорости без задевания или касания соседнего винта или был размещен немного выше или ниже другого винта для задания интервала по вертикали в случае их перекрывания. В таких вариантах реализации в итоге получают шасси мультикоптера, имеющее плоскую форму и единый общий размер по вертикали, что позволяет этому шасси охватывать все эти винты. Такая плоская форма может упростить хранение, упаковку и транспортировку по сравнению с использованием мультикоптера с винтами, расположенными на разных осях.
[0036] На фиг. 3 показан вид сверху примера мультикоптера с большими подъемными винтами и малыми управляющими винтами. На фиг. 3 показан пример расположения больших подъемных винтов 302 в центре мультикоптера, а также пример расположения восьми управляющих винтов и двигателей 308 вокруг периферии шасси мультикоптера. Обе группы винтов показаны в одной плоскости или в параллельных плоскостях в том смысле, что валы их винтов расположены в пределах шасси приблизительно параллельно друг другу. Таким образом, каждый винт расположен на расстоянии от соседнего винта, при этом дуги винтов не пересекают или не касаются друг друга, поскольку они расположены по горизонтали или вертикали на расстоянии друг от друга, например находятся в параллельных плоскостях на разной высоте, при этом дуги винтов могли перекрывать друг друга или иметь более близкое расположение друг к другу в случае их расположения в одной и той же плоскости. Кроме того, количество и место расположения управляющих винтов малого размера могут отличаться соответственно от количества и места расположения, показанных на фиг. 3. Например, вместо восьми винтов могут быть использованы только четыре управляющих винта 308, при этом они могут иметь иное место расположения в пределах шасси.
[0037] В некоторых примерах каждый управляющий винт имеет свой электродвигатель 308 и управляется бортовой компьютерной системой. Такое управление может включать управление скоростью вращения винтов и синхронизацию с другими управляющими винтами и/или большими подъемными винтами 302. В конструктивном исполнении, в котором использованы большие подъемные винты 302 в сочетании с лежащими с ними в одной плоскости управляющими винтами 308, скорости управляющих винтов могут изменяться чаще скоростей подъемных винтов при осуществлении маневрирования. Поскольку управляющие винты могут изменять тангаж, рыскание и крен всего мультикоптера, каждый двигатель, управляющий каждым управляющим винтом 308, должен независимо управляться бортовым компьютером. Это может позволить независимо изменять скорость управляющего винта во время полета. Подъемными винтами 302 также управляет бортовой компьютер, однако изменения скорости подъемных винтов 302 могут и не быть такими же частыми или внезапными, как у малых управляющих винтов 308.
[0038] Кроме того, конструктивные исполнения, в которых винты в мультикоптере расположены в одной плоскости, могут обеспечивать профиль шасси, имеющий компактные размеры по высоте. При размещении подъемных винтов 308 и управляющих винтов 302 в пределах шасси приблизительно на одной и той же высоте это шасси может иметь относительно небольшую общую высоту, сохраняя при этом ширину, подходящую для вмещения всех дуг винтов. Такое плоское конструктивное исполнение может позволить хранить мультикоптеры в одном месте. Это также может обеспечить возможность укладывания мультикоптеров друг на друга с образованием стопы. Это также может обеспечить возможность работы мультикоптера в сооружениях и вокруг них, что в иных случаях было бы невозможно.
[0039] В некоторых вариантах реализации подъемные винты 302 имеют размеры и вес, по меньшей мере в два раза превышающие соответственно размер и вес управляющих винтов 308, при этом количество управляющих винтов 308 по меньшей мере в два раза превышает количество подъемных винтов 302. Таким образом, если подъемный винт 302 имеет длину, составляющую один метр, то управляющий винт должен иметь длину, составляющую полметра или менее. В некоторых иллюстративных вариантах реализации подъемный винт 302 может иметь длину, составляющую один метр, а каждый управляющий винт 308 может иметь длину, составляющую четверть метра.
[0040] В результате такого разделения винтов по меньшей мере на два типа получают подъемные винты 302, имеющие больший размер, такой как диаметр ротора или дуга винта, и потенциально больший вес в зависимости от материала, используемого при изготовлении этих винтов. При эксплуатации подъемные винты могут достигать в целом постоянной скорости для большинства режимов полета, изменяемых для совершения высотных маневров и маневров с зависанием. Благодаря этому конструктивному исполнению подъемные винты 302 могут не требовать такого же частого изменения скорости вращения, как управляющие винты 308. Таким образом, если подъемные винты 302 совместно используют двигатель, такой как электродвигатель, двигатель внутреннего сгорания, турбовентиляторный двигатель или турбореактивный двигатель, то нагрузка на трансмиссию или привод синхронизации может быть меньше, поскольку подъемные винты 302 как правило будут иметь более постоянную скорость вращения, чем управляющие винты 308.
[0041] В некоторых вариантах реализации управляющие винты, имеющие диск ротора малого размера и, следовательно, имеющие небольшой вес и быстрое время отклика, могут в основном создавать при работе крутящий момент и момент тангажа по отношению к несущему корпусу мультикоптера. Это может упростить, повысить эффективность и увеличить точность маневрирования или изменения пространственной ориентации мультикоптера и размещения его корпуса по отношению к линии перемещения. В некоторых вариантах реализации управляющие винты могут увеличивать горизонтальную тягу, создаваемую большими подъемными винтами, при наклоне мультикоптера по направлению к общей линии перемещения, как описано более подробно со ссылкой на фиг. 6.
[0042] На фиг. 4 показан еще один пример перспективной схемы иллюстративного мультикоптера. В некоторых вариантах реализации вместо простой корректировки скорости подъемных винтов 402 и/или управляющих винтов 408 ориентация мультикоптера в воздухе может быть скорректирована с использованием пластин элерона, размещенных параллельно друг другу под всеми винтами или некоторыми из них. Подвижные пластины или элероны 470, установленные под винтами на шасси, могут работать совместно с системой стабилизации мультикоптера. Таким образом, отклоняющие пластины или элероны могут отклонять воздушный поток, создаваемый любым из винтов, для обеспечения маневрирования. На фиг.4 показаны также элероны 470, прикрепленные к шасси, прикрепленному к любой из различных систем для управления его перемещением, например манипулятору и серводвигателю, имеющим связь с бортовым компьютером. Элероны 470 могут быть размещены с возможностью отведения тяги от подъемных винтов для обеспечения маневрирования. Элероны 470 подъемных винтов 402 и/или управляющих винтов 408 могли бы быть размещены в любом из различных мест под нижней стороной шасси или на ней.
[0043] В некоторых иллюстративных вариантах реализации может быть изменена не только скорость вращения винтов, но и может быть скорректирован тангаж каждой отдельной лопасти винта. В таких примерах во время полета для корректировки подъемной силы может быть использован тангаж лопасти подъемного винта, даже если вращение самого винта остается постоянным. В некоторых примерах такая постоянная скорость вращения винтов может требовать меньше энергии, чем при изменении скорости отдельных винтов. Система может быть выполнена с возможностью автоматического вращения в аварийной ситуации, что приводит к уменьшению скорости потери высоты мультикоптером при потере мощности.
[0044] В некоторых примерах винты могут быть установлены на карданных шарнирах, которые перемещают и изменяют угол всего блока винтов по отношению ко всей каркасной раме шасси. В таких примерах для оказания воздействия на подъемную силу винта в своей соответствующей секции мультикоптера могут быть использованы серводвигатели, приводимые в действие бортовой компьютерной системой. Это может быть использовано для изменения любого режима полета, в том числе режима зависания, а также режимов горизонтального перемещения.
[0045] Примеры полета
[0046] На фиг. 5 показана схема последовательности событий при полете иллюстративного мультикоптера, использующего как большие подъемные винты, так и малые управляющие винты. Сперва на этапе 502 в начале перемещения мультикоптера запускают все винты обоих типов, при этом одна половина этих винтов совершает вращение в одном направлении, а другая половина этих винтов совершает вращение в другом направлении для обеспечения взаимной компенсации крутящих моментов вращающихся винтов. В дальнейшем на этапе 504 большие подъемные винты, вращающиеся с плавным уменьшением или увеличением скорости каждый раз, когда необходимо изменить высоту полета или обеспечить зависание, создают основную подъемную силу. В дальнейшем на этапе 506 управляющие винты, имеющие меньшие размеры по сравнению с подъемными винтами, выполняют функцию управления пространственной ориентацией корпуса мультикоптера и изменением его положения по отношению к линии его перемещения. По этой причине управляющие винты имеют более быстрый отклик на изменение скорости вращения и, следовательно, больше подходят для осуществления частых корректировок скорости, чем большие подъемные винты. В некоторых примерах количество управляющих винтов превышает количество подъемных винтов, например, в два или три раза. В конечном итоге на этапе 508 в случае, когда мультикоптер набирает высоту, достаточную для горизонтального полета, управляющие винты наклоняют корпус мультикоптера путем ускорения управляющих винтов с одной стороны и замедления управляющих винтов с другой стороны. В результате происходит наклон корпуса мультикоптера, а результирующая сила тяги, обеспечиваемая потоками винтов всех типов, приобретает горизонтальную составляющую, которая создает горизонтальную силу тяги, позволяющую мультикоптеру совершать перемещение над поверхностью земли.
[0047] На фиг. 6 показан пример графического изображения мультикоптера по мере его перехода от взлета к зависанию и режиму горизонтального полета. Сначала при нахождении на земле на стадии 602 подъемные винты начинают совершать вращение и создавать вертикальную подъемную силу. Результирующий вектор 690 силы тяги полностью направлен по вертикали. В дальнейшем на стадии 604 подъемные винты отрывают мультикоптер от земли, а управляющие винты начинают совершать вращение быстрее с одной стороны шасси, чем с другой его стороны. Результирующий вектор 690 силы тяги по большей части направлен по вертикали, однако при этом создается небольшая горизонтальная сила 692 тяги. В дальнейшем на стадии 606 на заданной высоте над землей управляющие винты увеличивают скорость вращения и наклоняют шасси мультикоптера в одну сторону к направлению перемещения. Этим наклоном можно управлять путем ускорения управляющих винтов с одной стороны шасси и замедления управляющих винтов с другой стороны шасси, что обеспечивает создание большей и меньшей подъемной силы соответствующих частей шасси. Результирующий вектор 692 горизонтальной силы тяги удлиняется по мере укорачивания вектора 690 вертикальной силы тяги. В дальнейшем на стадии 608 благодаря тому, что управляющие винты наклоняют шасси, подъемные винты создают не только основную вертикальную подъемную силу мультикоптера, но и создают некоторую горизонтальную силу тяги. Результирующий вектор 692 горизонтальной силы тяги в этот момент намного больше вектора 690 вертикальной силы тяги. В конечном итоге на стадии 610 мультикоптер использует управляющие винты и подъемные винты для управления высотой и пространственным положением мультикоптера для обеспечения наиболее эффективного режима при этих условиях. В этот момент вектор 692 горизонтальной силы тяги намного больше вектора вертикальной силы тяги, который может и вовсе отсутствовать. В любой момент времени мультикоптер может повернуть в направлении, обратном направлению, которое было у него при взлете на стадии 602, а также зависнуть, приземлиться и т.п. В некоторых вариантах реализации вследствие большой силы тяги, создаваемой подъемными винтами, мультикоптер может потребовать ориентации, приближенной к ориентации во время взлета на стадии 602, для набора значительной высоты. На высоте ориентация может быть снова с наклоном в направлении горизонтального режима 610 полета, а также назад и вперед по мере необходимости во время полета.
[0048] Таким образом, в некоторых примерах горизонтальная сила тяги может быть создана как подъемными винтами, так и управляющими винтами, а в некоторых других вариантах реализации соотношение горизонтальной силы тяги, создаваемой подъемными винтами, и силы тяги, создаваемой управляющими винтами, может составлять, например, 60 к 40 или 70 к 30.
[0049] Примеры управления
[0050] На фиг. 7 показан пример группы компьютерных аппаратных средств 701, которые могут быть использованы мультикоптером для управления винтами, осуществления навигации, установления беспроводной связи, получения показаний датчиков, приведения в действие любых бортовых периферийных устройств и т.п. Для обработки инструкций в компьютере 701 может быть использован центральный процессор 702, который может быть выполнен с возможностью обмена данными с другими компонентами компьютерных аппаратных средств с использованием шины 704 или другого проводного соединения. Кроме того, центральный процессор 702 выполнен с возможностью обмена данными с каким-либо пользовательским интерфейсом 706. Такой пользовательский интерфейс может представлять собой пользовательский интерфейс любого типа на самом мультикоптере или может быть соединен с удаленной наземной станцией или другим операторским пунктом (не показаны) с использованием беспроводного передатчика. Пользовательский интерфейс 706 может быть использован для управления мультикоптером, осуществления навигации, получения результатов диагностических измерений различных показателей мультикоптера, программирования направлений полета или целевых направлений мультикоптера (например для нижеописанного опрыскивания сельскохозяйственных культур). Пользовательский интерфейс 706 может быть использован для изменения режимов автопилота, на которые запрограммирован мультикоптер, или для любых других целей. Аппаратные средства также содержат любое из различных периферийных устройств 708, таких как антенна для удаленной связи, антенны для навигационной системы, например глобальной спутниковой навигационной системы (GPS), спутниковой навигационной системы «ГЛОНАСС», системы «ГАЛИЛЕО», системы «ЛОРАН», радиолокационный маячок или периферийный объект любого другого вида, такой как оператор датчика, камера, датчики полезной нагрузки, акселерометры, гироскоп, индикатор воздушной скорости, альтиметр, радиолокационный альтиметр, датчик скорости для двигателей, разбрызгиватели, средства перемещения грузов, например лебедки с зацепами, механизм выпускания шасси, механизм перемещения элерона и т.п. В завершение показано, что память 710 содержит любую из различных программ, таких как, без ограничения, операционная система 712, сетевые средства 714 связи, инструкции 716, приложения 718, носитель 720 данных, таблицы 722 данных, журналы 724 транзакций, записи 726 параметров полета и зашифрованные данные 728. Компьютерными аппаратными средствами в мультикоптере может быть использована любая иная из программ.
[0051] Такие компьютерные аппаратные средства могут содержать программы, которые мультикоптер может использовать для конкретных режимов полета. Например, программа зависания может быть использована мультикоптером по любой из возможных причин, например в случае потери связи с оператором наземного пункта управления. Для осуществления навигации, например для навигации в промежуточные пункты маршрута, зависания, патрулирования, навигации к дому и посадки, в случае потери управления или мощности и т.п. могут быть использованы программы автопилота. Автопилот может быть использован для режима захвата и сброса груза. Автопилот может быть использован при опрыскивании образцов сельскохозяйственных культур и т.п. Компьютер мультикоптера может быть запрограммирован на любой вид режимов автопилота или режимов управления полетом.
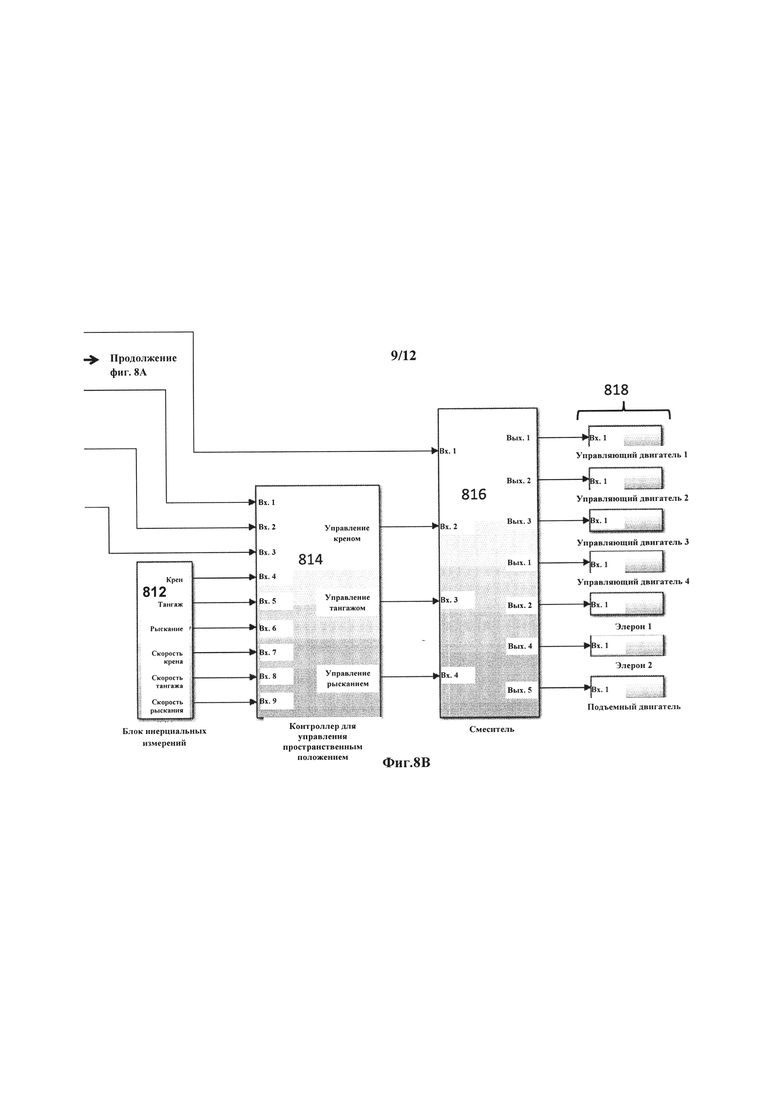
[0052] На фиг. 8А и фиг. 8В показан пример процесса управления согласно некоторым вариантам реализации, описанным в данном документе. В конкретных примерах система управления может содержать два контура: внутренний управляющий контур и внешний управляющий контур. Такая компоновка может быть объединена в одну комбинацию из аппаратных средств и программного обеспечения.
[0053] Сначала система автопилота принимает сигналы от датчиков положения и датчиков состояния. В качестве таких датчиков может быть использовано любое количество приборов, таких как, без ограничения, акселерометры, гироскопы, магнитометры, альтиметры, датчик атмосферного давления, системы навигации, такие как глобальная навигационная спутниковая система (GPS), спутниковая навигационная система «ГЛОНАСС», система «ЛИДАР», система «ЛОРАН», датчики наземных станций, датчики скорости вращения двигателей внутреннего сгорания, датчики оборотов управляющего двигателя и т.п.
[0054] В примере согласно фиг. 8 показаны три группы входных данных от трех источников: наземной станции 802, средств 804 спутниковой навигации, таких как глобальная навигационная спутниковая система и система 806 «ЛИДАР» для обнаружения и определения дальности с помощью света. Может быть использована группа входных данных любого вида, при этом вышеуказанные три группы входных данных использованы в качестве примера на фиг. 8А. В дальнейшем входные данные положения от любой комбинации из этих или других датчиков положения передают в позиционирующее устройство 808. Такое позиционирующее устройство может представлять собой компьютерную систему, встроенную в бортовой компьютер. В дальнейшем позиционирующее устройство 808 определяет параметры управления по осям x, у и z для их ввода в матрицу 810 поворота. Матрица 810 поворота может определять любое количество заданных величин, таких как, без ограничения, тяга, крен, тангаж и рыскание.
[0055] Внутренний контур управления
[0056] Внутренний контур управления может осуществлять автоматическое (а также автоматизированное) управление креном, тангажом, рысканием и тягой летательного аппарата. На фиг. 8В показано продолжение фиг. 8А. Контроллер 814 для управления пространственным положением принимает данные о рыскании, тангаже и крене от матрицы 810 поворота. Кроме того, контроллер 814 для управления пространственным положением принимает входные данные от инерциального датчика, гироскопа или блока 812 инерциальных измерений.
[0057] Сигналами обратной связи могут являться углы крена (по отношению к горизонту), углы наклона (по отношению к горизонту) и углы рыскания (по отношению к северу или курсу), а также угловая скорость крена, тангажа и рыскания, высота летательного аппарата, скорость изменения высоты, атмосферное давление и т.п. Управляющие сигналы по углам крена, тангажа и рыскания и управляющий сигнал по тяге летательного аппарата поступают от внешнего контура управления. Кроме того, управляющими сигналами и сигналами обратной связи внутреннего управляющего контура могут являться матрицы поворота, кватернионы, векторы силы тяги и т.п.
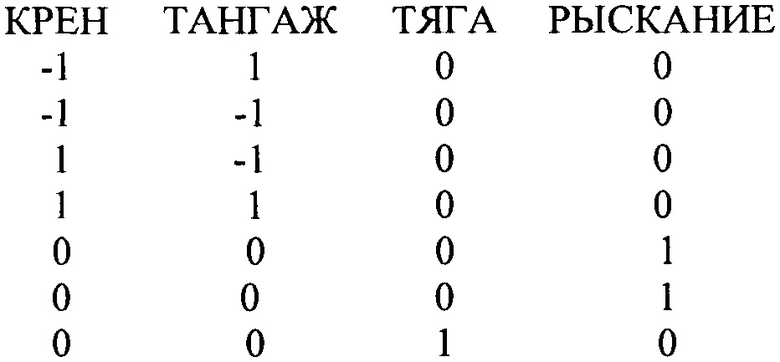
[0058] В качестве указанного контроллера могут быть использованы отдельные контроллеры для каждого из каналов управления (креном, тангажом, рысканием и тягой). Контроллер может быть использован в качестве пропорционального, пропорционально-интегрального и пропорционально-интегрально-дифференциального регулятора по углу и угловой скорости (и любых других контроллеров). Выходные сигналы, выдаваемые контроллерами 814 в каждый из каналов управления, могут влиять на каждый из приводов летательного аппарата, в частности на подъемные винты, управляющие винты, элероны и т.п. Влияние каждого управляющего сигнала может быть определено матрицей смешивания, в которой каждый из сигналов определен коэффициентом его воздействия тот или иной привод.
[0059] Входной сигнал от контролера 814 для управления пространственным положением по рысканью, тангажу, крену и тяге из матрицы 810 поворота может быть принят смесителем 816. Смеситель типа «Qql6» может использовать следующую матрицу смешивания:


[0060] Выходные данные, выданные смесителем 816, могут быть поданы в различные двигатели подъемных и управляющих винтов 818.
[0061] Внешний контур управления
[0062] Внешний контур управления может осуществлять автоматическое (а также автоматизированное) управление положением, высотой, курсом, скоростью и перемещением летательного аппарата во всемирной системе координат и т.п. Внешний контур управления может определять режимы полета летательного аппарата, такие как взлет, посадка, стабилизация высоты над уровнем моря, стабилизация высоты над поверхностью земли, стабилизация положения в пространстве, полетное задание, полет над преградами, возврат к точке старта, полет при потере связи, а также другие режимы. Кроме того, внешний контур управления может управлять вспомогательным оборудованием летательного аппарата.
[0063] Сигналами обратной связи для внешнего контура управления могут являться положение летательного аппарата во всемирной системе координат, скорость движения в пространстве, высота летательного аппарата над землей (основной поверхностью/уровнем моря), скорость изменения высоты, направление полета, скорость изменения курса и другие. Сигналами управления для внешнего контура управления могут являться координаты во всемирной системе координат, курс, скорость движения в пространстве, высота над землей (основной поверхностью/уровнем моря) и другие.
[0064] Для каждого из каналов управления (курсом, движением по широте, движением по долготе, высотой, скоростью движения и другими показателями) могут иметься отдельные контроллеры. Контроллер может быть использован в качестве пропорционального, пропорционально-интегрального и пропорционально-интегрально-дифференциального регулятора (и любых других контроллеров). Выходные сигналы, выдаваемые контроллерами в каждый из каналов управления внешнего контура, могут влиять на каждый из входных сигналов внутреннего контура управления. Влияние каждого из управляющих сигналов может быть определено конфигурацией матриц поворота, векторов тяги, матрицы смешивания и т.п.
[0065] Примеры управления на основе шифрования
[0066] В некоторых вариантах реализации мультикоптером может управлять наземный или спутниковый пункт управления или мультикоптер может иметь связь с таким наземным или спутниковым пунктом управления. В таких иллюстративных вариантах реализации могут быть зашифрованы сигналы, отправленные на мультикоптер и от него для осуществления навигации, обеспечения направления или управления периферийными устройствами, например датчиками, камерами, опрыскивателями, захватными устройствами и т.п. Такое шифрование может гарантировать, что мультикоптер не примет нежелательные управляющие входные сигналы, а сигналы, передаваемые мультикоптером, будут приняты исключительно предопределенной наземной или спутниковой станцией.
[0067] Таким образом, бортовой компьютер, программное обеспечение и соответствующее программное обеспечение для наземной/спутниковой станции специально разработаны для обеспечения безопасности при осуществлении операций. В частности, некоторые варианты реализации содержат средства защиты управляющего радиоканала, средства защиты от вредоносных действий оператора и средства защиты от физической замены контроллера для управления полетом. В некоторых вариантах реализации подход к обеспечению безопасности основан на инфраструктуре открытых ключей (PKI). В таких примерах контроллер для управления полетом может хранить PKI-сертификаты, выданные сертифицирующим органом и используемые для авторизации всех входящих команд.
[0068] В некоторых вариантах реализации система разделяет права на исполнение программных операций путем загрузки заданной программы полета в контроллер для управления полетом и права на разработку программы полета, которая должна быть выполнена контроллером для управления полетом. В таких примерах пользователь, который имеет права на исполнение программных операций, использует для этого соответствующий сертификат оператора, выданный сертифицирующим органом. Сертификат оператора позволяет системе устанавливать безопасную командную радиосвязь с программным обеспечением и передавать заданные программы полета на борт. Человек, который имеет права на разработку программы полета, использует для этого соответствующий сертификат разработчика, выданным сертифицирующим органом. В результате программа полета может хранить подпись безопасности, которая может гарантировать, что программа является пригодной для ее исполнения контроллером для управления полетом. Вышеописанное разделение прав может помочь гарантировать защиту от вредоносных действий оператора или других лиц, например от попытки злоумышленников взять под контроль средства управления. Для получения полного управления над программным обеспечением необходимо получить как сертификат оператора, так и сертификат разработчика, которые всегда разделены между двумя пользователями, что делает попытки злоумышленников захватить контроль и управление совершенно невыполнимыми.
[0069] Для защиты системы от физической замены контроллера для управления полетом в некоторых вариантах реализации предусмотрена процедура авторизации между контроллером для управления полетом и контроллерами для управления электродвигателями управляющих винтов (ЕМ-контроллерами) или периферийным устройством любого другого вида, таким как сенсорное средство управления, камера, датчики полезной нагрузки, акселерометры, гироскоп, индикатор воздушной скорости, альтиметр, датчик оборотов двигателей и т.п., при этом эта процедура авторизации может быть основана на использовании технологии «Блокчейн». ЕМ-контроллеры могут быть приведены в действие активирующей стороной, например контроллером для управления полетом, в соответствии с процедурой обмена данными и верификации. Эта процедура обмена данными может быть успешно применена, если активирующая сторона знает ключи, полученные из уникальных закрытых ключей ЕМ-контроллеров с использованием специального алгоритма. Эти уникальные закрытые ключи могут быть загружены в защищенную область памяти ЕМ-контроллеров во время их производства. Полученные ключи могут быть загружены в защищенную область памяти контроллера для управления полетом также во время его производства. Таким образом, контроллер для управления полетом может работать исключительно с бортовыми ЕМ-контроллерами. Замена контроллера для управления полетом приведет к тому, что новый контроллер для управления полетом не будет иметь ключей бортовых ЕМ-контроллеров. Такие ЕМ-контроллеры не могут быть приведены в действие контроллером для управления полетом и останутся неактивными, что приведет к неспособности обеспечивать навигацию системы.
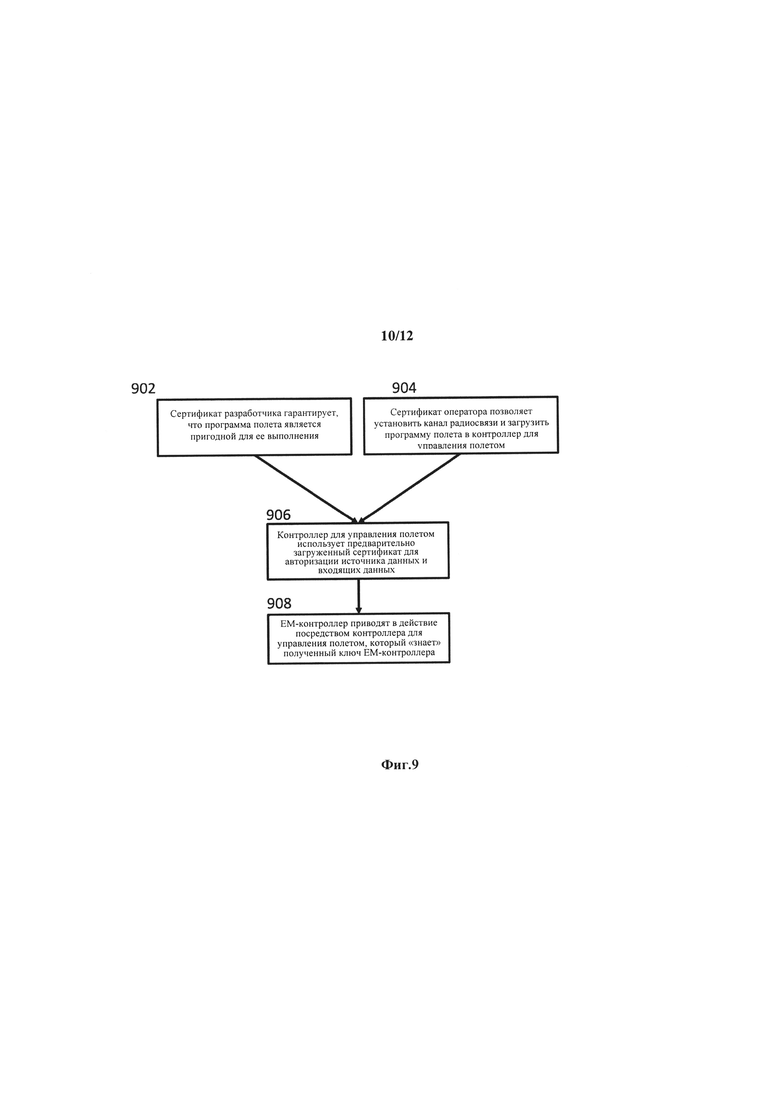
[0070] На фиг. 9 показан пример блок-схемы примеров управления полетом на основе шифрования в соответствии с некоторыми вариантами реализации. На фиг. 9 показаны два варианта предварительной загрузки сертификата для начала процесса. В одном из вариантов сертификат разработчика гарантирует, что программа полета является пригодной для ее исполнения на этапе 902. В другом варианте сертификат оператора позволяет установить канал радиосвязи и загрузить программу полета в контроллер для управления полетом на этапе 904. В любом случае на следующем этапе 906 контроллер для управления полетом использует предварительно загруженный сертификат для авторизации источника данных и входящих данных. В завершение на этапе 908 ЕМ-контроллер приводят в действие посредством контроллера для управления полетом, который знает полученный ключ ЕМ-контроллера. Таким образом, шифрование может быть использовано для защиты от захвата третьей стороной управления и контроля.
[0071] Примеры груза
[0072] Поскольку мультикоптеры, раскрытые в данном документе, могут иметь размеры, являющиеся достаточно большими для того, чтобы они могли поднять и переместить сотни и даже тысячи фунтов груза (1 фунт = 0,454 кг), мультикоптер может быть использован для любых промышленных целей, в том числе, без ограничения, для перемещения груза и опрыскивания сельскохозяйственных культур. Варианты реализации несущих нагрузку средств могут иметь много разных форм и могут быть установлены на шасси в любом из различных мест. Например, в некоторых вариантах реализации шасси использует любое число зацепов, направляющих рельсов, корзин, сетей, рычагов или иных удерживающих или подъемных устройств, установленных под этим шасси, на его боковых сторонах и/или непосредственно на самой раме. Для перемещения груза вверх и вниз по отношению к шасси могут быть также установлены шкивы и/или лебедки.
[0073] Для некоторых примеров груза может быть необходимо обеспечить прикрепление этого груза к мультикоптеру таким образом, чтобы он не оказывал негативного воздействия на вес и параметры балансировки при полете. Таким образом, вес груза и балансировка могут быть рассчитаны бортовыми датчиками, размещенными в различных местах на шасси.
[0074] Пьезоэлектрические датчики или тензодатчики, установленные с разных сторон корпуса или шасси мультикоптера, могут быть использованы для определения местоположения груза и возможной разбалансировки. Такие тензодатчики могут быть размещены в каждом из опорных шасси, в посадочном устройстве, в местах крепления груза или в иных местах, подходящих для осуществления измерений. Датчики могут иметь связь с бортовым компьютером и/или иметь связь, посредством беспроводных передатчиков, с другим компьютером для информирования оператора или автоматизированного контроллера о компоновке груза. Таким образом, перед взлетом или во время полета может быть обнаружено любое отклонение от расчетного допустимого диапазона центра тяжести мультикоптера. В случае возникновения таких отклонений система выдает предупредительное сообщение об этом с использованием системы связи при дистанционном управлении и/или автопилотировании.
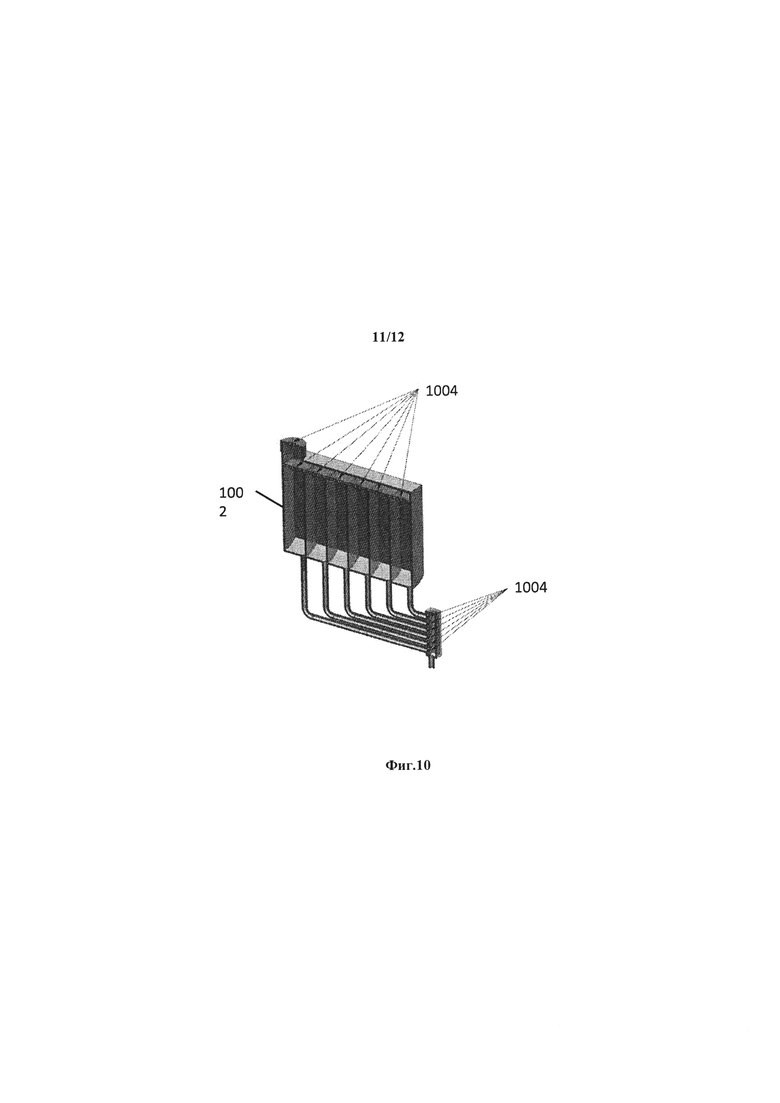
[0075] В компоновках груза, например при опрыскивании сельскохозяйственных культур, мультикоптер может транспортировать и доставлять различные удобрения, зерно, воду и/или иные химические вещества. Например, мультикоптер может доставлять жидкость и/или сухой материал с использованием распыляющих насадок, размещенных на нижней стороне и боковых сторонах шасси. В некоторых вариантах реализации выпускание или опорожнение содержимого резервуаров может быть отрегулировано с тем, чтобы гарантировать, что вес и баланс не станут негативно влиять на полет. На фиг. 10 показан пример группы резервуаров, которые могут быть использованы мультикоптером для хранения, транспортировки и доставки пригодной для распыления полезной нагрузки. Показанные основные накопительные резервуары 1002 разделены на секции для уменьшения плескания содержимого в полете, а также для распределения веса во время наполнения и опорожнения этих резервуаров. Кроме того, в пределах разделенных на секции резервуаров могут быть использованы и любые дополнительные перегородки и/или стенки. Запорные клапаны 1004 могут быть размещены на входе каждого подрезервуара для обеспечения наполнения, а также в выходных отверстиях для обеспечения разбрызгивания.
[0076] На фиг. 11 показаны детали иллюстративных резервуаров, показанных на фиг. 10. Запорный клапан в основном заливном отверстии 1102, показанный на фиг. 11, ведет к камере 1106, ведущей к отдельным запорным клапанам 1104 для каждого подрезервуара. В дальнейшем распыляемый материал может быть залит через заливное отверстие 1102 и может заполнять подрезервуары для последующего распыления или выпускания распыляемого груза с использованием распылителей любой конструкции.
[0077] Заключение
[0078] Как описано в данном документе, признаки настоящего изобретения могут быть реализованы с использованием аппаратных средств компьютера, программного обеспечения и/или программно-аппаратного обеспечения. Например, системы и способы, раскрытые в данном документе, могут быть осуществлены в различных формах, в том числе, например, процессор для обработки данных может быть реализован в виде компьютера, который также содержит базу данных, цифровую электронную схему, программно-аппаратное обеспечение, программное обеспечение, вычислительные сети, серверы или их комбинации. Кроме того, несмотря на то, что в некоторых из раскрытых вариантов реализации описаны специальные аппаратные компоненты, системы и способы, соответствующие инновационным идеям, раскрытым в данном документе, могут быть реализованы с использованием любой комбинации из аппаратных средств, программного обеспечения и/или программно-аппаратного обеспечения. Кроме того, вышеупомянутые признаки и иные аспекты и принципы инновационных идей, раскрытых в данном документе, могут быть реализованы в различном оборудовании. Такое оборудование и соответствующие приложения могут быть специально разработаны для выполнения различных процедур, процессов и/или операций согласно настоящему изобретению или они могут содержать компьютер общего назначения или вычислительную платформу, избирательно приводимые в действие или перенастраиваемые с использованием кода для обеспечения необходимых функциональных возможностей. Процессы, раскрытые в данном документе, не обязательно связаны с каким-либо конкретным компьютером, сетью, конструктивным исполнением, оборудованием или другим устройством и могут быть реализованы с использованием подходящей комбинации из аппаратных средств, программного обеспечения и/или программно-аппаратного обеспечения. Например, различные вычислительные машины общего назначения могут быть использованы вместе с программами, написанными в соответствии с идеями настоящего изобретения, или настоящее изобретение может быть более пригодно для разработки специального устройства или специальной системы для реализации необходимых способов и технологий.
[0079] Аспекты способа и системы, описанные в данном документе, например логические схемы, могут быть реализованы в виде функций, запрограммированных в любой из различных электронных схем, содержащих программируемые логические устройства, такие как программируемые пользователем вентильные матрицы, устройства с программируемой матричной логикой, электически программируемая логика и запоминающие устройства, стандартные устройства на основе ячеек, а также специализированные интегральные схемы. Некоторые иные возможности для реализации аспектов содержат: запоминающие устройства, микроконтроллеры с памятью (такие как электрически стираемая перепрограммируемая постоянная память), встроенные микропроцессоры, программно-аппаратное обеспечение, программное обеспечение и т.п. Кроме того, аспекты могут быть реализованы в микропроцессорах, имеющих эмуляцию схем на основе программного обеспечения, дискретную логику (последовательную и комбинаторную), специальные устройства, нечеткую (нейронную) логику, квантовые устройства и гибриды любого из устройств вышеупомянутых типов. Лежащие в основе устройств технологии могут быть обеспечены в компонентах множества различных типов, например технологии полевых МОП-транзисторов, подобные комплементарному металло-оксидному полупроводнику, технологии биполярных транзисторов, подобные логической схеме с эмиттерными связями, полимерные технологии (например, конструкции из кремне-сопряженного полимера и металло-сопряженного полимер-металла), смешанные аналоговые и цифровые технологии и так далее.
[0080] Следует заметить, что различные логические схемы и/или функции, раскрытые в данном документе, могут быть обеспечены с использование любого количества комбинаций из аппаратных средств, программно-аппаратных средств и/или данных, и/или инструкций, реализованных на различных машиночитаемых или компьютерочитаемых носителях данных в соответствии с их поведенческой характеристикой, характеристикой межрегистровых передач, характеристикой логического компонента и/или другими характеристиками. Компьютерочитаемые носители данных, на которых могут быть реализованы такие форматированные данные и/или инструкции, содержат, без ограничения, энергонезависимые запоминающие устройства в различных формах (например, оптические, магнитные или полупроводниковые запоминающие устройства) и несущие волны, которые могут быть использованы для передачи таких форматированных данных и/или инструкций с использованием беспроводных, оптических или проводных информационных средств передачи сигналов или любой их комбинации. Примерами передачи таких форматированных данных и/или инструкций с использованием несущей волны являются, без ограничения, передачи (загрузки, скачивания, электронная почта и т.п.) через сеть Интернет и/или иные компьютерные сети с использованием протоколов передачи данных (например, HTTP-протокола, FTP-протокола, SMTP-протокола и т.п.).
[0081] Если из контекста не следует иное, в описании и формуле изобретения слова «содержит», «содержащий» и т.п. следует толковать в расширенном смысле, являющемуся противоположностью исключительному или исчерпывающему смыслу, а именно в смысле «содержит, но не ограничен этим». Слова в единственном числе или множественном числе не исключают их использования соответственно во множественном числе или единственном числе. Кроме того, слова «в данной документе», «в соответствии с данным документом», «выше», «ниже» и слова подобного значения относятся ко всему этому документу, а не к любым отдельным частям. В случае, когда слово «или» использовано в отношении списка из двух или большего количества элементов, это слово охватывает все следующие его интерпретации: любой из элементов в списке, все элементы в списке и любая комбинация из элементов в списке.
[0082] Несмотря на то, что в данном документе специально описаны конкретные предпочтительные варианты реализации, специалистам очевидно, эти различные варианты реализации, показанные и описанные в данном документе, могут быть изменены и модифицированы без выхода за пределы сущности и объема настоящего изобретения. Соответственно, предполагается, что настоящее изобретение ограничено исключительно до той степени, которая определена действующими законодательными требованиями.
[0083] В приведенном выше описании в качестве примера были описаны конкретные варианты реализации. Однако не следует считать, что приведенные выше описания являются исчерпывающими или ограничивают настоящее изобретение раскрытыми точными формами. Согласно вышеизложенному возможны многие модификации и изменения. Варианты реализации были выбраны и описаны для наилучшего пояснения принципов настоящего изобретения и его практического применения с тем, чтобы позволить другим специалистам использовать настоящее изобретение и различные варианты реализации с различными модификациями, которые наиболее подходят для предполагаемого конкретного использования.
| название | год | авторы | номер документа |
|---|---|---|---|
| МУЛЬТИКОПТЕР С ПОВОРОТНЫМ КРЫЛОМ | 2015 |
|
RU2700084C2 |
| МУЛЬТИКОПТЕР С ВОЗДУШНЫМИ ВИНТАМИ КОМБИНИРОВАННОГО НАЗНАЧЕНИЯ И ГИБРИДНОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКОЙ ВИНТОМОТОРНЫХ ГРУПП | 2022 |
|
RU2803214C1 |
| Экраноплан с двигательной установкой, выполненной по схеме мультикоптера | 2023 |
|
RU2833275C1 |
| ЕДИНЫЙ АЭРОНАЗЕМНЫЙ ДВИЖИТЕЛЬ ЛЕТАТЕЛЬНОГО АППАРАТА | 2019 |
|
RU2735442C1 |
| ЛЕТАТЕЛЬНЫЕ АППАРАТЫ С НЕСВЯЗАННЫМИ СТЕПЕНЯМИ СВОБОДЫ | 2019 |
|
RU2769822C1 |
| Малогабаритный летательный аппарат (ЛА) вертикального взлета/посадки с увеличенной дальностью полета | 2017 |
|
RU2681464C1 |
| МУЛЬТИКОПТЕР С ДВУХЪЯРУСНЫМ РАСПОЛОЖЕНИЕМ ВИНТОМОТОРНЫХ ГРУПП | 2021 |
|
RU2766284C1 |
| Летательный аппарат вертикального взлета и посадки с дополнительными грузовыми модулями и выдвигаемыми воздушными винтами | 2021 |
|
RU2759061C1 |
| Мультикоптер с полноповоротным рулем направления, гибридной двигательной установкой и комбинированными винтомоторными группами | 2023 |
|
RU2831361C1 |
| Противотанковая мина "Стрекоза-М" с возможностью пространственного перемещения с зависанием и переворачиванием в воздухе, разведки, нейтрализации и поражения мобильных бронированных целей | 2016 |
|
RU2628351C1 |





Группа изобретений относится к мультикоптерной системе и способу приведения в действие летательного аппарата. Мультикоптерная система содержит шасси и расположенные на нем по меньшей мере один подъемный двигатель, не менее четырех управляющих двигателей, множество установленных определенным образом управляющих воздушных винтов, привод для соединения подъемного двигателя с подъемными воздушными винтами, компьютер, антенну с возможностью обмена данными с компьютером. Для приведения в действия летательного аппарата приводят во вращение по меньшей мере два подъемных воздушных винта и два управляющих воздушных винта, управляют вращением управляющих воздушных винтов с использованием бортового компьютера. Обеспечивается повышение управляемости мультикоптера. 2 н. и 31 з.п. ф-лы, 11 ил.
1. Мультикоптерная система, содержащая:
шасси, на котором установлены по меньшей мере один подъемный двигатель и по меньшей мере четыре управляющих двигателя,
по меньшей мере два подъемных воздушных винта, выполненных с возможностью создания вертикальной силы тяги,
множество управляющих воздушных винтов, выполненных с возможностью создания горизонтальной силы тяги,
привод, соединяющий указанный по меньшей мере один подъемный двигатель с указанными по меньшей мере двумя подъемными воздушными винтами,
при этом указанные по меньшей мере четыре установленных управляющих двигателя присоединены каждый к управляющему воздушному винту из множества управляющих воздушных винтов,
указанные по меньшей мере два подъемных винта и указанное множество управляющих воздушных винтов расположены в одной плоскости или параллельных плоскостях и
длина подъемных воздушных винтов по меньшей мере вдвое больше длины управляющих воздушных винтов, а
мультикоптерная система также содержит:
компьютер, установленный на шасси с возможностью обмена данными с указанными по меньшей мере четырьмя управляющими двигателями и указанным по меньшей мере одним подъемным двигателем и выполненный с возможностью управления указанными по меньшей мере четырьмя управляющими двигателями для изменения скорости вращения указанного множества управляющих воздушных винтов и указанным по меньшей мере одним подъемным двигателем для изменения скорости вращения указанных по меньшей мере двух подъемных воздушных винтов, при этом изменение скорости вращения указанных по меньшей мере двух подъемных воздушных винтов происходит реже изменения скорости вращения указанного множества управляющих воздушных винтов,
источник электропитания, установленный на шасси и соединенный с указанными по меньшей мере четырьмя управляющими двигателями, и
антенны, установленные на шасси с возможностью обмена данными с компьютером.
2. Система по п. 1, дополнительно содержащая множество элеронов, установленных на шасси под указанными по меньшей мере двумя подъемными воздушными винтами, при этом указанное множество элеронов выполнено с возможностью отклонения воздушного потока, создаваемого любым из указанных по меньшей мере двух подъемных воздушных винтов или указанного множества управляющих воздушных винтов.
3. Система по п. 2, в которой указанное множество элеронов прикреплено к множеству механических рук с серводвигателями, связанными с компьютером с возможностью управления перемещением указанного множества элеронов.
4. Система по п. 3, в которой компьютер дополнительно выполнен с возможностью управления указанными по меньшей мере четырьмя управляющими двигателями, указанным по меньшей мере одним подъемным двигателем и указанным множеством элеронов с использованием следующей матрицы смешивания:
5. Система по п. 1, в которой источник электропитания представляет собой аккумуляторную батарею или генератор.
6. Система по п. 1, в которой указанные подъемные и управляющие воздушные винты установлены в пределах периферии шасси,.
7. Система по п. 1, дополнительно содержащая датчики нагрузки, установленные на шасси с возможностью обмена данными с компьютером, который выполнен с возможностью расчета неравномерности распределения нагрузки и выдачи предупредительного сообщения о неравномерном распределении нагрузки.
8. Система по п. 1, в которой на шасси дополнительно установлены распылитель и/или зацеп.
9. Система по п. 8, дополнительно содержащая один или более резервуаров, выполненных с возможностью хранения, транспортировки и подачи пригодной для распыления полезной нагрузки.
10. Система по п. 9, в которой указанные один или более резервуаров разделены на подрезервуары, на входе и выходе каждого из которых имеется запорный клапан.
11. Система по п. 1, в которой длина указанных по меньшей мере двух подъемных воздушных винтов составляет по меньшей мере 1 метр.
12. Система по п. 1, в которой бортовой компьютер дополнительно выполнен с возможностью установления зашифрованного канала связи с оператором наземного пункта управления с использованием антенны.
13. Система по п. 1, в которой указанный по меньшей мере один подъемный двигатель представляет собой по меньшей мере одно из следующих устройств: электродвигатель, двигатель внутреннего сгорания или газотурбинный двигатель.
14. Система по п. 1, в которой компьютер дополнительно выполнен с возможностью обмена данными с навигационной системой и управления вращением указанного множества управляющих воздушных винтов для обеспечения маневрирования мультикоптерной системы согласно путевым точкам навигационной системы.
15. Система по п. 1, в которой указанный по меньшей мере один подъемный двигатель содержит основной двигатель, при этом привод содержит вал или ремень.
16. Система по п. 15, в которой основной двигатель содержит двигатель внутреннего сгорания, при этом привод дополнительно содержит трансмиссию.
17. Система по любому из пп. 1-16, в которой компьютер дополнительно выполнен с возможностью управления каждым из указанных по меньшей мере четырех управляющих двигателей отдельно от остальных управляющих двигателей.
18. Система по любому из пп. 1-16, в которой указанный по меньшей мере один подъемный двигатель содержит по меньшей мере два подъемных двигателя внутреннего сгорания, установленных на шасси.
19. Система по любому из пп. 1-16, в которой шасси содержит периферийную конструкцию, окружающую указанные подъемные воздушные винты и указанные управляющие воздушные винты.
20. Система по любому из пп. 1-16, в которой компьютер дополнительно выполнен с возможностью:
обмена данными по меньшей мере с одним из навигационной системы, акселерометра, гироскопа или альтиметра и
управления скоростью вращения указанных подъемных воздушных винтов и указанных управляющих воздушных винтов на основании входных данных от указанного по меньшей мере одного из навигационной системы, акселерометра, гироскопа или альтиметра.
21. Способ приведения в действие летательного аппарата, согласно которому:
приводят во вращение по меньшей мере два подъемных воздушных винта, установленных на шасси, в результате чего указанные по меньшей мере два подъемных воздушных винта создают вертикальную силу тяги,
приводят во вращение по меньшей мере два управляющих воздушных винта, каждый из которых имеет отдельные электродвигатели, установленные на шасси, в результате чего указанные по меньшей мере два управляющих воздушных винта создают горизонтальную силу тяги,
при этом при установке на шасси указанные по меньшей мере два подъемных воздушных винта и указанные по меньшей мере два управляющих воздушных винта расположены в одной плоскости или параллельных плоскостях, а согласно указанному способу также
управляют вращением указанных управляющих воздушных винтов с использованием бортового компьютера, установленного на шасси, при этом указанное управление включает изменение вращения указанных по меньшей мере двух управляющих воздушных винтов чаще изменения вращения указанных по меньшей мере двух подъемных воздушных винтов.
22. Способ по п. 21, согласно которому к шасси дополнительно прикрепляют несущий зацеп.
23. Способ по п. 21, согласно которому управление дополнительно включает вращение каждого управляющего воздушного винта с разной скоростью вращения в зависимости от результатов расчета параметров навигации и ориентации, полученных бортовым компьютером.
24. Способ по п. 23, согласно которому бортовой компьютер выполнен с возможностью обмена данными с навигационной системой, при этом указанный способ дополнительно включает управление вращением указанных управляющих воздушных винтов для маневрирования летательного аппарата согласно путевым точкам.
25. Способ по п. 23, дополнительно включающий осуществление, посредством бортового компьютера, беспроводного обмена зашифрованными сигналами с оператором наземного пункта управления с использованием антенны.
26. Способ по п. 25, согласно которому длина управляющих воздушных винтов по меньшей мере вдвое меньше длины подъемных воздушных винтов, составляющей по меньшей мере один метр.
27. Способ по п. 22, дополнительно включающий управление, посредством бортового компьютера, распылителем, прикрепленным к шасси.
28. Способ по п. 22, согласно которому шасси содержит датчики нагрузки, выполненные с возможностью обмена данными с бортовым компьютером, при этом указанный способ дополнительно включает расчет и индикацию, посредством бортового компьютера, неравномерности распределения нагрузки.
29. Способ по любому из пп. 21-28, дополнительно включающий осуществление, посредством бортового компьютера, наклона шасси в первую сторону путем увеличения скорости вращения одного или более управляющих воздушных винтов из указанных по меньшей мере двух управляющих воздушных винтов, расположенных с первой стороны, и уменьшения скорости вращения одного или более управляющих воздушных винтов из указанных по меньшей мере двух управляющих воздушных винтов, расположенных со второй стороны шасси, противоположной первой стороне.
30. Способ по п. 29, дополнительно включающий управление высотой и пространственным положением шасси путем создания вертикальной силы тяги и горизонтальной силы тяги указанными по меньшей мере двумя подъемными воздушными винтами.
31. Способ по п. 30, согласно которому горизонтальная сила тяги, созданная указанными по меньшей мере двумя подъемными воздушными винтами, больше вертикальной силы тяги.
32. Способ по п. 30, согласно которому указанные по меньшей мере два подъемных воздушных винта по существу не создают вертикальной силы тяги.
33. Способ по п. 30, согласно которому горизонтальная сила тяги, созданная указанными по меньшей мере двумя подъемными воздушными винтами, больше горизонтальной силы тяги, созданной указанными по меньшей мере двумя управляющими воздушными винтами.
| МНОГОВИНТОВОЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2014 |
|
RU2567496C1 |
| US 8128033 B2, 06.03.2012 | |||
| Тротуароуборочная машина | 1989 |
|
SU1759988A1 |
| US 20070018035 A1, 25.01.2007 | |||
| WO 2013124300 A1, 29.08.2013. | |||

