ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к строительству, в частности к устройствам для удаления льда в виде сосулек и наледи с карнизов кровли, выступающих элементов фасадов зданий, водостоков.
УРОВЕНЬ ТЕХНИКИ
Из уровня техники известно устройство для безударного разрушения сосулек и наледи на краях крыш зданий (RU 2745926, 2020). Устройство содержит трубчатое основание с закрепленным на его торце рабочим органом и снабжено ручками для удержания устройства и управления рабочим органом. Рабочий орган выполнен в виде шинной цепной пилы, плоскость шины находится под углом к оси трубчатого основания. Торец трубчатого основания со стороны ручек снабжен двигателем, связанным с рабочим органом посредством углового редуктора и вала, расположенного внутри трубчатого основания. Оператор обслуживающий устройство поднимается на необходимую высоту в люльке автогидроподъемника. Устройство подключается к бортовой сети автогидроподъемника, шина шинной цепной пилы подводится к разрушаемой наледи. После включения электродвигателя перемещением устройства цепной пилой производится горизонтальный срез наледи. Недостатком устройства является большие материальные и трудовые затраты, ограниченная доступность к объекту работы по высоте и месту.
Наиболее близким к предлагаемому техническому решению является конструкция беспилотного летательного аппарата вертикального взлета и посадки (RU 2799426, 2023, Битуев А.Г)
Известный беспилотный летательный аппарат вертикального взлета и посадки (далее -БИЛА) содержит фюзеляж с электрическими двигателями с приводными валами и редукторами расположенными в его средней части. Вентиляторы, установленные в средней части фюзеляжа, имеют возможность создавать поток воздуха из отверстия в верхней части фюзеляжа в направлении от фюзеляжа в стороны, на крылья, закрытые с концов обтекателями. Система связи и бортовая аппаратура управления расположена в носовой части фюзеляжа. Компрессор с ресивером расположены в хвостовой части фюзеляжа и имеют возможность подачи сжатого воздуха к соплам системы управления, установленными на штангах. Сопла системы управления обеспечивают управление по тангажу, рысканию и крену на всех режимах полета. Заслонки расположенные под задней кромкой крыльев и соединенные с устройствами привода сообщают БПЛА горизонтальную скорость вперед и назад. Аккумулятор расположен внизу средней части фюзеляжа. Достоинством известного технического решения является возможность вертикального взлета и посадки, большая грузоподъемность и экономичность, что позволяют применять БПЛА в качестве платформы в различных целях.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Технической задачей изобретения является повышение качества очистки карнизов крыш зданий от сосулек и наледи, повышение экономичности производимых работ. Поставленная задача решена благодаря тому, что предлагаемое устройство для удаления сосулек, содержит в себе: фюзеляж (1), имеющий носовую часть, хвостовую часть и среднюю часть, расположенную между ними, манипулятор (5) с технологическим инструментом (6) соединенный сочленением с носовой частью фюзеляжа, приводной двигатель внутреннего сгорания (19) соединенный с генератором электрического тока (20) расположенные в хвостовой части фюзеляжа, электрические двигатели (10) с приводными валами (11) расположенные в средней части фюзеляжа, приводные валы (11) кинематически соединенные с осями вентиляторов (4) через редукторы (12), вентиляторы (4), установленные в средней части фюзеляжа (1) таким образом, что имеют возможность создавать поток текучей среды из отверстия в верхней части фюзеляжа в направлении от фюзеляжа в стороны, крылья (2) закрытые с концов обтекателями (3), выполненные таким образом, что подъемная сила создается потоком текучей среды в направлении от фюзеляжа в стороны, систему связи и бортовую аппаратуру управления (16) расположенную в носовой части фюзеляжа, компрессор (17) с ресивером (18) расположенный в носовой части фюзеляжа, выполненный с возможностью подачи сжатого воздуха к сопловому аппарату (23) привода технологического инструмента (6) манипулятора (5), привод технологического инструмента (6) включающий рычаг (21) установленный на оси (22) соединенной со звеном манипулятора, при этом на одном плече рычага установлен технологический инструмент (6), на другом плече установлен сопловый аппарат (23), выполненный таким образом, что подача технологического инструмента (6) на предмет труда производится поворотом рычага (21) относительно оси (22) при истечении струи сжатого воздуха из соплового аппарата (23), винтомоторные аппараты (8) установленные на штангах (7), выполненные с возможностью управления по тангажу, рысканию и крену на всех режимах полета, заслонки (29), установленные в корпусах (28), расположенных под задней кромкой крыльев (2) и соединенные с устройствами привода заслонок (31), устройства привода заслонок (31), выполненные с возможностью поворота заслонок (29) относительно оси (30) таким образом, что в одном из положений заслонки наклонены вперед, а в другом из положений наклонены назад, аккумулятор (13), топливный бак (14) расположенные в средней части фюзеляжа, шасси (9)
По сути, поставленная задача достигается путем объединения достоинств несущей системы известного беспилотного летательного аппарата вертикального взлета и посадки с возможностями манипуляционного робота следующим образом: беспилотный летательный аппарат вертикального взлета и посадки, имеющий фюзеляж, крылья, вентиляторы, отличается тем, что на БПЛА установлен манипулятор с технологическим инструментом.
Как будет понятно специалисту, преимущества предлагаемого устройства по сравнению с выбранным прототипом достигаются в основном благодаря тому, что поставленная задача выполняется одним оператором, с возможностью широкого доступа к предмету труда по месту на любой высоте с применением различных инструментов в режимах дистанционного управления или мобильного адаптивного робота. В предпочтительных формах воплощения вышеописанного устройства для удаления сосулек:
- технологический инструмент (6) содержит электрический двигатель (24) приводной вал которого кинематически соединен с осями соосно установленных дисковой пилы (27) и балансира (26) через редуктор (25)
- в крыльях (2) выполнены каналы с щелями (15) таким образом, что имеют возможность создавать скоростной поток сжатого воздуха на верхнюю поверхность крыла по всей длине
Предлагаемое изобретение иллюстрируется чертежами.
КРАТКОЕ ОПИСАНИЕ ФИГУР ЧЕРТЕЖЕЙ
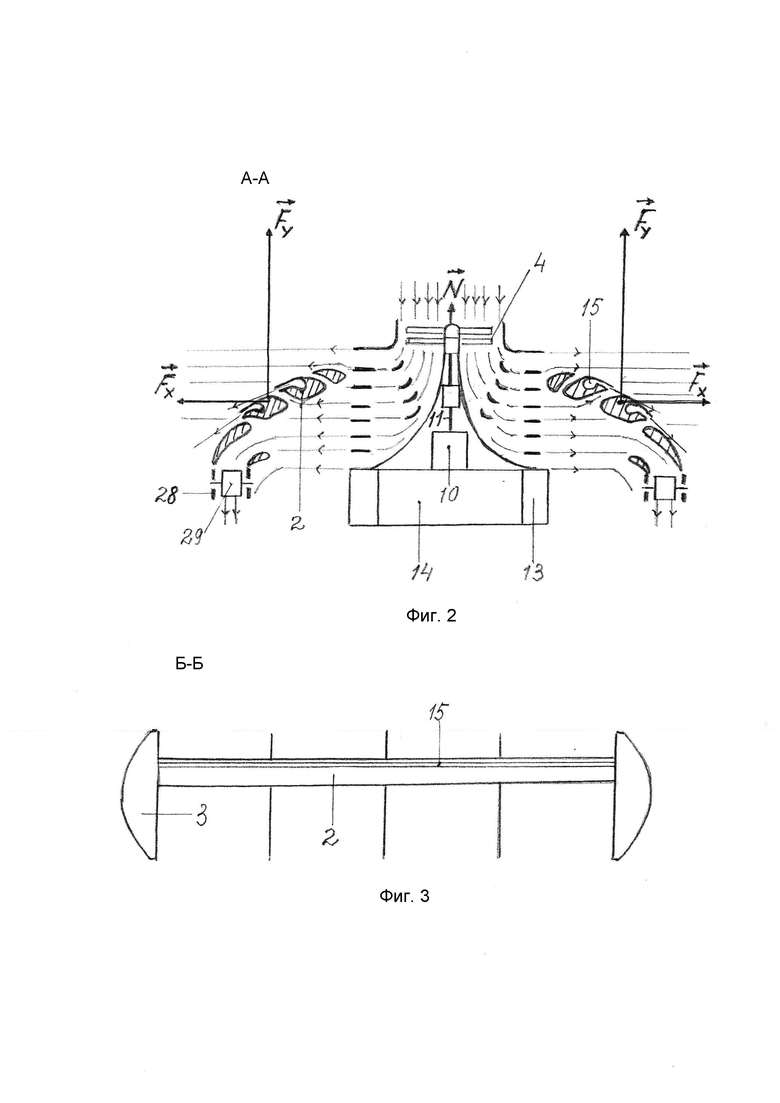
На Фиг. 1 представлен общий вид устройства в трех проекциях. На Фиг. 2 показано сечение А-А. На Фиг. З показано сечение Б-Б.
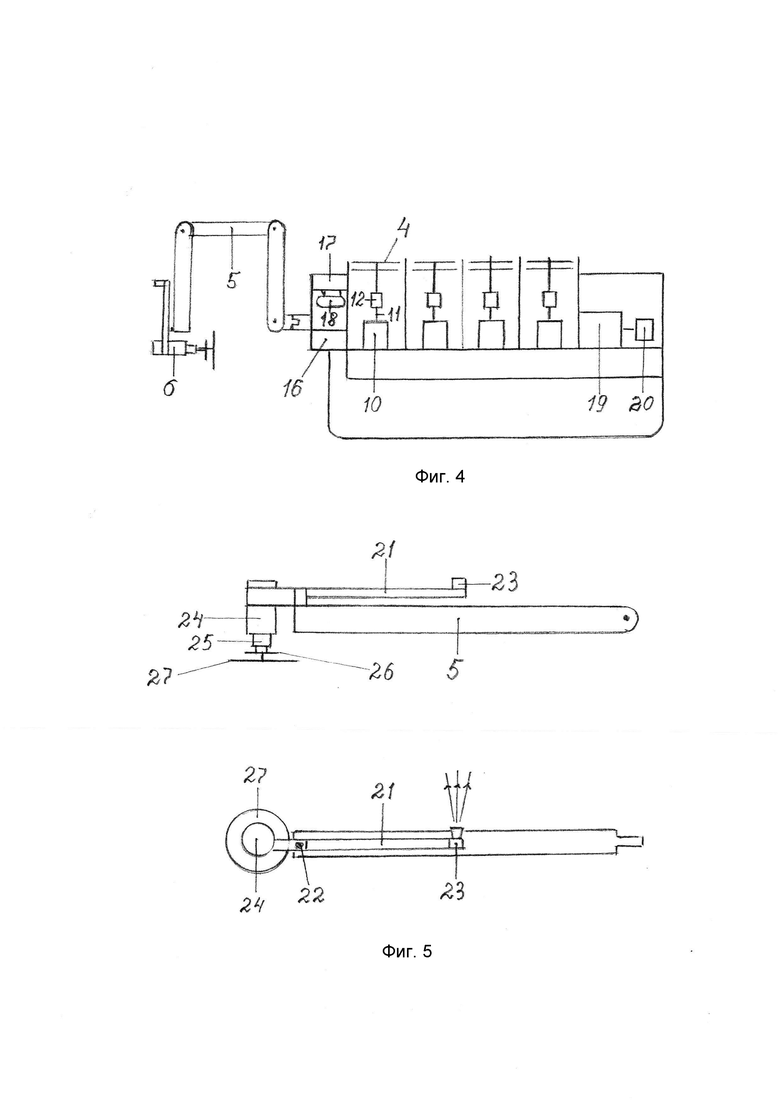
На Фиг. 4 показан схематический чертеж устройства
На Фиг. 5 показана конструкция технологического инструмента с приводом в двух проекциях
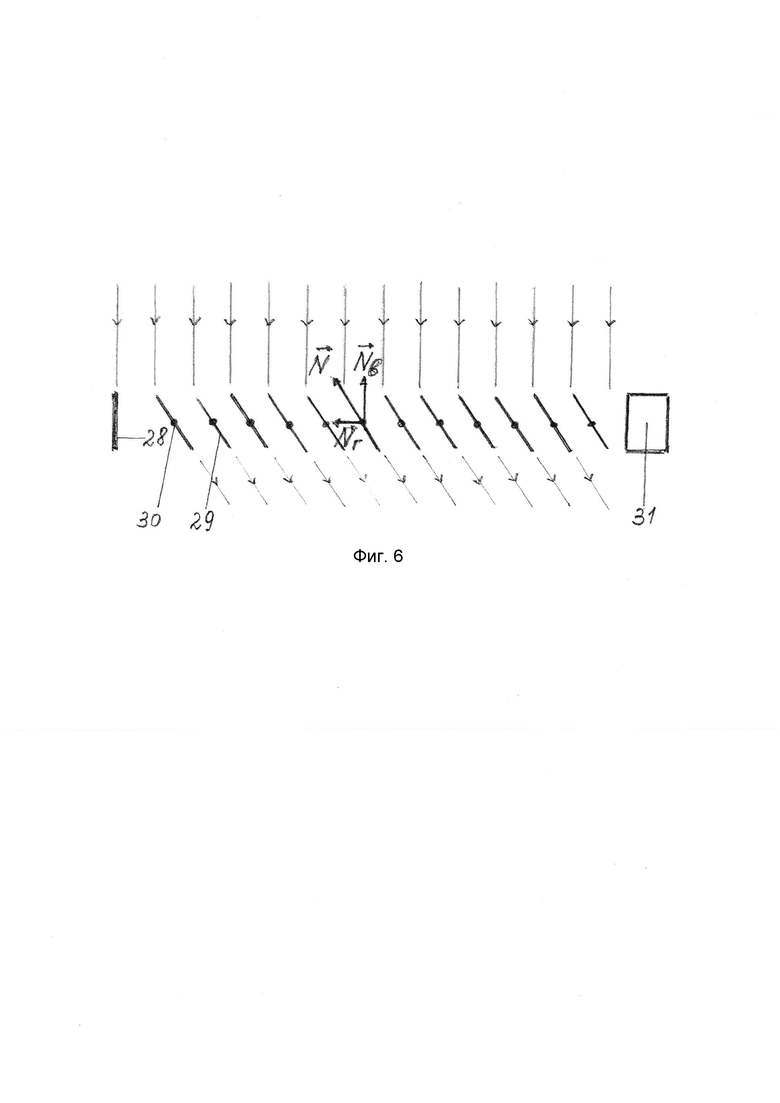
На Фиг. 6 показана схема создания горизонтальной тяги
Позициями 1-31 обозначены:
1 - фюзеляж,
2 - крыло,
3 - обтекатель крыла,
4 - вентилятор,
5 - манипулятор
6 - технологический инструмент
7 - штанга
8 - винтомоторный аппарат
9 - шасси
10 - электрический двигатель,
11 - приводной вал,
12 - редуктор,
13 - аккумулятор,
14 - топливный бак,
15 - канал с щелью
16 - система связи и бортовая аппаратура управления,
17 - компрессор,
18 - ресивер,
19 - приводной двигатель внутреннего сгорания,
20 - генератор,
21 - рычаг,
22 - ось
23 - сопловый аппарат,
24 - электрический двигатель инструмента,
25 - редуктор инструмента,
26 - балансир,
27 - дисковая пила,
28 - корпус заслонок,
29 - заслонка,
30 - ось заслонки,
31 - устройство привода заслонок,
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Как показано на Фиг. 1 устройство для удаления сосулек содержит:
фюзеляж 1,
крылья 2,
обтекатели крыльев 3,
вентиляторы 4,
манипулятор 5,
технологический инструмент 6,
штанги 7,
винтомоторные аппараты 8
шасси 9
Как показано на Фиг. 2 по бокам в средней части фюзеляжа 1 передней кромкой друг к другу, параллельно и симметрично относительно продольной оси устройства установлены крылья 2 закрытые с концов обтекателями 3. Электрические двигатели 10 с приводными валами 11 через редукторы 12 передают крутящий момент двухступенчатым вентиляторам с роторами противоположного вращения 4. В крыльях 2 по всей длине выполнены каналы с щелями 15, через которые истекает скоростной плоский поток сжатого воздуха на верхнюю поверхность крыла по всей длине. При этом кривизна аэродинамического профиля обеспечивает отклонение части воздушного потока вентиляторов вниз. Отклоненный воздушный поток вентиляторов проходит через заслонки, 29 установленные в корпусах 28, расположенных под задней кромкой крыльев.
Как показано на Фиг. 3 воздушные потоки вентиляторов 4 разделены перегородками. Как показано на Фиг. 4 носовая часть фюзеляжа 1 соединена сочленением с манипулятором с электрическим приводом 5 и технологическим инструментом 6. В носовой части фюзеляжа расположен компрессор 17 с ресивером 18, обеспечивающий подачу по трубопроводам сжатого воздуха, а также система связи и бортовая аппаратура управления 16. В средней части фюзеляжа последовательно установлены электрические двигатели 10 с приводными валами 11, кинематически соединенными с осями вентиляторов 4 через редукторы 12. В хвостовой части фюзеляжа расположены приводной двигатель внутреннего сгорания 19 соединенный с генератором 20.
Как показано на Фиг. 5 технологический инструмент 6 состоит из электрического двига-' теля 24 приводной вал которого кинематически соединен с осями соосно установленных дисковой пилы 27 и балансира 26 через редуктор 25. Балансир 26 компенсирует реактивный момент вращения дисковой пилы 27, что повышает устойчивость устройства. Привод технологического инструмента 6 состоит из рычага 21 на оси 22, соединенной со звеном манипулятора, и установленного на длинном плече рычага соплового аппарата 23. Подача инструмента на предмет труда (сосулька, наледь) производится поворотом рычага 6 относительно оси 22 при истечении струи сжатого воздуха из соплового аппарата 23.
Как показано на Фиг. 6 под задней кромкой крыльев 2 установлены заслонки 29. Заслонки установлены с одинаковым шагом в корпусе 28 прямоугольной формы, открытому сверху и снизу. При этом заслонки 29 соединены с устройством привода 31. Устройство привода заслонок 31 выполнено с возможностью поворота заслонок 29 относительно оси 30 таким образом, что в одном из положений заслонки наклонены вперед, а в другом из положений наклонены назад.
Винтомоторные аппараты 8 выполнены с возможностью наклона относительно оси крепления к штанге 7 влево и вправо. Ускорением и наклоном соответствующих пар винтов (передних, задних) обеспечивается управление по тангажу, рысканию и крену на всех режимах полета.
Для обеспечения стабильного зависания устройство снабжено гироскопами фиксирующими крен, акселерометрами устанавливающими абсолютно горизонтальное положение, бародатчиком позволяющим фиксировать устройство на нужной высоте. На устройство устанавливается GPS приемник который позволяет записывать маршрут полета, а также возвращать устройство в точку взлета, (не показано)
Работа устройства для удаления сосулек и наледи на краях крыш зданий осуществляется следующим образом.
Вертикальный взлет:
1) После запуска приводного двигателя 19 соединенного с генератором 20 производится преобразование механической энергии в электрическую энергию. (Фиг. 4)
2) после подачи электрической энергии электрическим двигателям 10 приводные валы 11 передают крутящий момент через редукторы 12 вентиляторам 4. Воздушный поток вентиляторов обтекая крылья 2 создает подъемную силу (Fy) и силу лобового сопротивления (Fx) и далее частично отклоняясь вниз создает силу тяги (N).
В каналы с щелями 15 подается сжатый воздух от компрессора 17. Плоский скоростной поток сжатого воздуха истекает на верхнюю поверхность крыльев по всей длине. Отраженный от поверхности отклоненный воздушный поток создает избыточное давление под крылом. (Фиг. 2)
3) как только вертикальная тяга, как сумма подъемных сил крыльев (Fy) и силы тяги вентиляторов (N),станет больше силы тяжести произойдет отрыв устройства от поверхности и начнется вертикальный взлет. Вертикальный взлет осуществляется при сложенном манипуляторе.
Осуществление удаления сосулек и наледи на краях крыш зданий:
Процесс производства работ зависит от применяемой в устройстве системы управления
1) В варианте с системой дистанционного управления оператор после набора необходимой высоты устройством привода заслонок 31 синхронно наклоняют заслонки 29 на одинаковый угол вперед. При наклоне заслонок 29 вперед образуется горизонтальная составляющая (Nг) силы тяги вентиляторов (N) которая и сообщает устройству горизонтальную скорость (Фиг. 6). При необходимости торможения, остановки и движения задним ходом заслонки 29 отклоняют назад. В режиме висения заслонки 29 находятся в вертикальном положении. После подлета к месту работы оператор по системе видеонаблюдения, данных датчиков позиционирует устройство по месту работы. Управляя манипулятором 5 оператор подводит технологический инструмент 6 к сосульке/наледи. Подачей сжатого воздуха к сопловому аппарату 23 привода и движением манипулятора сосулька или наледь спиливается дисковой пилой 27. Произведя работу по ширине захвата манипулятора оператор перемещает устройство на новое место работы. В зависимости от размера сосульки или наледи, ее расположения оператор определяет последовательность действий с заменой на соответствующий инструмент.
2) В варианте летающего адаптивного робота устройство работает с помощью разных программ и управляется сенсорами. Устройство производит анализ окружающей обстановки и задает алгоритм действий. Робот сам принимает решения, как ему поступить в той или иной ситуации.
3) В варианте интеллектуального робота устройство оснащено искусственным интеллектом. Устройство принимает решение на основе данных сенсорных датчиков. Они моделируют виртуальное пространство и потом ориентируются на следующие действия.
Вертикальная посадка осуществляется следующим образом:
1) После выполнения работ манипулятор приводится в исходное (сложенное) положение.
2) Устройство направляется оператором к месту посадки, плавное уменьшение оборотов двигателей 10 позволяет осуществить вертикальную посадку.
3) Адаптивный/интеллектуальный робот самостоятельно возвращается в точку взлета.
Таким образом, при расположении в воздушном потоке вентиляторов крыльев, передней кромкой друг к другу, параллельно и симметрично относительно продольной оси устройства векторная сумма сил лобового сопротивления становится равной нулю. Это дает возможность применения аэродинамических профилей с наибольшим коэффициентом подъемной силы (Су) без учета их коэффициента лобового сопротивления (Сх).
Для повышения коэффициента подъемной силы (Су) применяется система сдува пограничного слоя.
Реализация вышеперечисленных мероприятий, направленных на повышение коэффициента подъемной силы, позволяет значительно увеличить подъемную силу (при прочих равных условиях) при минимальных энергозатратах и следовательно повысить грузоподъемность и экономичность устройства.
Применение генератора с приводом от двигателя внутреннего сгорания в качестве источника электрической энергии увеличивает продолжительность работы устройства, упрощает конструкцию, снижает эксплуатационные расходы. При выходе из строя приводного двигателя /генератора устройство переходят на электроснабжение от аккумулятора, что позволяет устройству совершить посадку. Применение набора инструментов из дисковой пилы разных диаметров, дисковой фрезы, бура, щетки и других позволяет своевременно удалять сосульки и наледь в различных местах, в том числе недоступных для других способов, в любое время суток, что повышает качество производимых работ. Применение устройства повышает безопасность работ.
Применяемое устройства позволяет меньшим количеством персонала произвести больший объем работы за одинаковый промежуток времени, что повышает производительность труда. Снижение издержек производства повышает экономичность.
| название | год | авторы | номер документа |
|---|---|---|---|
| Беспилотный летательный аппарат вертикального взлёта и посадки | 2023 |
|
RU2799426C1 |
| Беспилотный летательный аппарат вертикального взлёта и посадки | 2024 |
|
RU2824222C1 |
| Беспилотный летательный аппарат вертикального взлёта и посадки | 2023 |
|
RU2805891C1 |
| Самолёт вертикального взлёта и посадки | 2021 |
|
RU2752276C1 |
| Беспилотный летательный аппарат вертикального взлёта и посадки | 2024 |
|
RU2826651C1 |
| САМОЛЁТ ВЕРТИКАЛЬНОГОГО ВЗЛЁТА И ПОСАДКИ | 2020 |
|
RU2736793C1 |
| Экраноплан | 2021 |
|
RU2766020C1 |
| Самолёт вертикального взлёта и посадки | 2022 |
|
RU2788231C1 |
| Турбовентиляторный двигатель | 2024 |
|
RU2840988C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ЭВАКУАЦИИ РАНЕНЫХ И ПОРАЖЕННЫХ | 2023 |
|
RU2829664C1 |

Изобретение относится к строительству, в частности к устройствам для удаления льда в виде сосулек и наледи с карнизов кровли, выступающих элементов фасадов зданий, водостоков. Технический результат изобретения заключается в повышении эксплуатационной надежности крыши. Устройство для удаления сосулек содержит в себе: фюзеляж, имеющий носовую часть, хвостовую часть и среднюю часть, расположенную между ними, манипулятор с технологическим инструментом соединенный сочленением с носовой частью фюзеляжа, приводной двигатель внутреннего сгорания, соединенный с генератором электрического тока, расположенный в хвостовой части фюзеляжа, электрические двигатели с приводными валами, расположенные в средней части фюзеляжа, приводные валы кинематически, соединенные с осями вентиляторов через редукторы, вентиляторы, установленные в средней части фюзеляжа таким образом, что имеют возможность создавать поток текучей среды из отверстия в верхней части фюзеляжа в направлении от фюзеляжа в стороны, крылья, закрытые с концов обтекателями, выполненные таким образом, что подъемная сила создается потоком текучей среды в направлении от фюзеляжа в стороны, систему связи и бортовую аппаратуру управления, расположенную в носовой части фюзеляжа, компрессор с ресивером, расположенный в носовой части фюзеляжа, выполненный с возможностью подачи сжатого воздуха к сопловому аппарату привода технологического инструмента манипулятора, привод технологического инструмента, включающий рычаг, установленный на оси, соединенной со звеном манипулятора, при этом на одном плече рычага установлен технологический инструмент, на другом плече установлен сопловый аппарат, выполненный таким образом, что подача технологического инструмента на сосульки труда производится поворотом рычага относительно оси при истечении струи сжатого воздуха из соплового аппарата, винтомоторные аппараты, установленные на штангах, выполненные с возможностью управления по тангажу, рысканию и крену на всех режимах полета, заслонки, установленные в корпусах, расположенных под задней кромкой крыльев и соединенные с устройствами привода заслонок, устройства привода заслонок, выполненные с возможностью поворота заслонок относительно оси таким образом, что в одном из положений заслонки наклонены вперед, а в другом из положений наклонены назад, аккумулятор, топливный бак, расположенные в средней части фюзеляжа, шасси. 2 з.п. ф-лы, 6 ил.
1. Устройство для удаления сосулек, содержащее: фюзеляж (1), имеющий носовую часть, хвостовую часть и среднюю часть, расположенную между ними, манипулятор (5) с технологическим инструментом (6), соединенный сочленением с носовой частью фюзеляжа, приводной двигатель внутреннего сгорания (19), соединенный с генератором электрического тока (20), расположенные в хвостовой части фюзеляжа электрические двигатели (10) с приводными валами (11), расположенные в средней части фюзеляжа приводные валы (11), кинематически соединенные с осями вентиляторов (4) через редукторы (12), вентиляторы (4), установленные в средней части фюзеляжа (1) таким образом, что имеют возможность создавать поток текучей среды из отверстия в верхней части фюзеляжа в направлении от фюзеляжа в стороны, крылья (2), закрытые с концов обтекателями (3), выполненные таким образом, что подъемная сила создается потоком текучей среды в направлении от фюзеляжа в стороны, систему связи и бортовую аппаратуру управления (16), расположенную в носовой части фюзеляжа, компрессор (17) с ресивером (18), расположенный в носовой части фюзеляжа, выполненный с возможностью подачи сжатого воздуха к сопловому аппарату (23) привода технологического инструмента (6) манипулятора (5), привод технологического инструмента (6), включающий рычаг (21), установленный на оси (22), соединенной со звеном манипулятора, при этом на одном плече рычага установлен технологический инструмент (6), на другом плече установлен сопловый аппарат (23), выполненный таким образом, что подача технологического инструмента (6) на сосульки производится поворотом рычага (21) относительно оси (22) при истечении струи сжатого воздуха из соплового аппарата (23), винтомоторные аппараты (8), установленные на штангах (7), выполненные с возможностью управления по тангажу, рысканию и крену на всех режимах полета, заслонки (29), установленные в корпусах (28), расположенных под задней кромкой крыльев (2) и соединенные с устройствами привода заслонок (31), устройства привода заслонок (31), выполненные с возможностью поворота заслонок (29) относительно оси (30) таким образом, что в одном из положений заслонки наклонены вперед, а в другом из положений наклонены назад, аккумулятор (13), топливный бак (14), расположенные в средней части фюзеляжа, шасси (9).
2. Устройство по п. 1, характеризующееся тем, что в нем технологический инструмент (6) содержит электрический двигатель (24), приводной вал которого кинематически соединен с осями соосно установленных дисковой пилы (27) и балансира (26) через редуктор (25).
3. Устройство по п. 1, характеризующееся тем, что в крыльях (2) выполнены каналы с щелями (15) таким образом, что имеют возможность создавать скоростной поток сжатого воздуха на верхнюю поверхность крыла по всей длине.
| 0 |
|
SU159060A1 | |
| Беспилотный летательный аппарат вертикального взлёта и посадки | 2023 |
|
RU2799426C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ МНОГОДУГОВОЙСВАРКИ | 0 |
|
SU221873A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ СБИВАНИЯ СОСУЛЕК С КАРНИЗОВ КРЫШ ЗДАНИЙ | 2023 |
|
RU2803676C1 |
| CN 103179808 A, 26.06.2013. | |||

