Изобретение относится к области вертолетостроения, а именно, к конструкции вертолета с кольцеобразным устройством для управления лопастями со средством безопасности.
Из уровня техники известен легкий двухместный вертолет Zefhir итальянской фирмы Curti Aerospace, над несущим винтом которого расположен контейнер с парашютом, который выстреливается в случае возникновения аварийной ситуации, например, в случае отказа двигателя или выхода из строя другого жизненного важного узла, или когда нет возможности приземлиться на авторотации. (ttps://www.techinsider.ru/technologies/486952-zefir-s-parashyutom-samyy-bezopasnyy-vertolet-v-mire/)
В этом устройстве контейнер увеличивает общую высоту вертолета по оси, дополнительный вес контейнера перемещает центр тяжести вертолета вдоль оси и тем самым усложняет управление и ухудшает летные характеристики. Эта конструкция неприменима в заявленном устройстве в котором отсутствует центральный винт привода лопастей.
Также известен вертолёт Р-30 с центральным несущим винтом с парашютной спасательной системой "Кобра 500", которая расположена за силовой установкой под хвостовой балкой (https://dzen.ru/a/X7I9So0Zkyvh7kzV).
Полному раскрытию парашюта этого известного решения могут помешать лопасти, а если парашют раскроется, то вертолет будет падать кабиной вниз. При таком падении может произойти искривление осевой стойки, вращающей лопасти, поломки лопастей и кабины, также высока вероятность травмирования пилота и пассажиров, что является недостатком данного устройства. При этом в ссылке сказано, что сами конструкторы не исключают повреждение конструкции при аварийном приземлении.
Наиболее близким к предложенному устройству является вертолет, содержащий кольцеобразное устройство для управления лопастями вертолета, включающее в себя
- жестко закрепленное на фюзеляже основание,
- две соосно размещенные кольцеобразные ведущая и ведомая платформы, на которых закреплены лопасти, и
- жестко закрепленные на основании вертикальные стойки с направляющими роликами, в которых установлена с возможностью вращения ведущая кольцеобразная платформа, выполненная в виде шестерни с внутренними зубьями, находящимися в постоянном зацеплении с шестерней, кинематически связанной с силовой установкой вертолета, при этом
кольцеобразные платформы соединены между собой с возможностью совместного синхронного вращения от силовой установки вертолета, и с возможностью ограниченного вертикального перемещения ведомой кольцеобразной платформы относительно ведущей кольцеобразной платформы посредством рулевого привода,
- лопасти разнесены друг от друга от оси вращения, а
- каждая лопасть прикреплена к верхней и нижней кольцеобразным платформам посредством двух шарнирно-рычажных крепежей, разнесенных друг от друга по горизонтали относительно оси вращения платформ и по вертикали, с возможностью поворота в вертикальной плоскости лопастей при перемещении ведомой кольцеобразной платформы относительно ведущей кольцеобразной платформы.
При этом рулевой привод включает в себя управляемый из кабины пилота проходящий через центральную подшипниковую опору основания винт, находящийся в постоянном зацеплении с ответной внутренней резьбой гайки со стабилизирующими стержнями, которые установлены в отверстиях, выполненных в основании, при этом гайка сопряжена с центральной подшипниковой опорой верхней платформы. (патент на изобретение № 2799165, МПК В64С27/59, 2023г.)
Это устройство принято за прототип, как наиболее близкое к предложенному.
Недостатком прототипа является то, что вертолет не оснащен парашютной системой безопасности.
Задачей заявленного решения является обеспечение безопасного аварийного приземления вертолета, оснащенного кольцеобразным устройством для управления лопастями вертолета, путем размещения парашютного средства внутри кольцеобразных платформ, встроенного в рулевой привод, позволяя при аварийной ситуации обеспечить горизонтальное перемещение вертолета без крена в какую-либо сторону.
Технический результат заявленного технического решения заключается в улучшении эксплуатационных характеристик (возможностей) вертолета с кольцеобразным устройством для управления лопастями путем обеспечения безопасного приземления при аварийной ситуации, без травмирования пилота и пассажиров и без повреждения конструкции вертолета.
Указанный технический результат достигается за счет того, что вертолет содержит смонтированное на фюзеляже кольцеобразное устройство для управления лопастями вертолета, включающее в себя
- жестко закрепленное на фюзеляже основание,
- соосно установленные ведущую и ведомую кольцеобразные платформы, на которых закреплены лопасти, и
- жестко закрепленные на основании вертикальные стойки с направляющими роликами, в которых установлена ведущая кольцеобразная платформа с возможностью вращения от силовой установки вертолета, при этом
- ведомая кольцеобразная платформа установлена с возможностью ограниченного вертикального перемещения ведомой кольцеобразной платформы относительно ведущей посредством рулевого привода и с возможностью совместного синхронного вращения с ведущей кольцеобразной платформой,
- лопасти разнесены друг от друга от оси вращения, а
- каждая лопасть прикреплена к ведущей и ведомой кольцеобразным платформам посредством шарнирно-рычажных крепежей, разнесенных друг от друга по горизонтали- относительно оси вращения кольцеобразных платформ, и по вертикали, с возможностью поворота в вертикальной плоскости лопастей при вертикальном перемещении ведомой кольцеобразной платформы относительно ведущей кольцеобразной платформы.
При этом вертолет оборудован парашютным средством безопасности, которое встроено в рулевой привод в пространство внутри кольцеобразных платформ и включает в себя жестко закрепленный на основании корпус в виде полого цилиндра, ось которого совпадает с осью вращения кольцеобразных платформ, и размещенный в полости цилиндра парашют, раскрывающийся при аварийной ситуации автоматически или вручную из кабины пилота. Наружная боковая поверхность цилиндра сопряжена с рулевым приводом посредством двух втулок - нижней и верхней, соединенных между собой с помощью резьбы, причем нижняя втулка установлена на цилиндре с возможностью вращения относительно него посредством шестеренчатого привода, управляемого из кабины пилота, верхняя втулка установлена с возможностью ограниченного возвратно-поступательного перемещения относительно нижней втулки вдоль цилиндра, а ведомая платформа прикреплена к верхней втулке с возможностью вращения относительно нее в подшипниковой опоре.
Шарнирно-рычажные крепежи лопастей к ведущей кольцеобразной платформе и шарнирно-рычажные крепежи лопастей к ведомой кольцеобразной платформе расположены в разных вертикальных плоскостях, проходящих через ось вращения платформ, а расстояние от шарнирно-рычажных крепежей лопастей к ведомой кольцеобразной платформе до оси вращения платформ меньше расстояния от шарнирно-рычажных крепежей лопастей к ведущей кольцеобразной платформе до указанной оси вращения.
Основание и верхняя и нижняя кольцеобразные платформы расположены в параллельных плоскостях.
Ведущая кольцеобразная платформа выполнена с расположенной над стойками консольной частью, на которой закреплены шарнирно-рычажные крепежи лопастей, и к ней жестко прикреплена шестерня с наружными зубьями, кинематически связанная с силовой установкой вертолета.
На цилиндре выполнены вертикальные направляющие с возможностью перемещения по ним верхней втулки.
При этом корпус имеет съемную крышку, а верхняя его часть расположена над лопастями.
Устройство иллюстрируется чертежами, где:
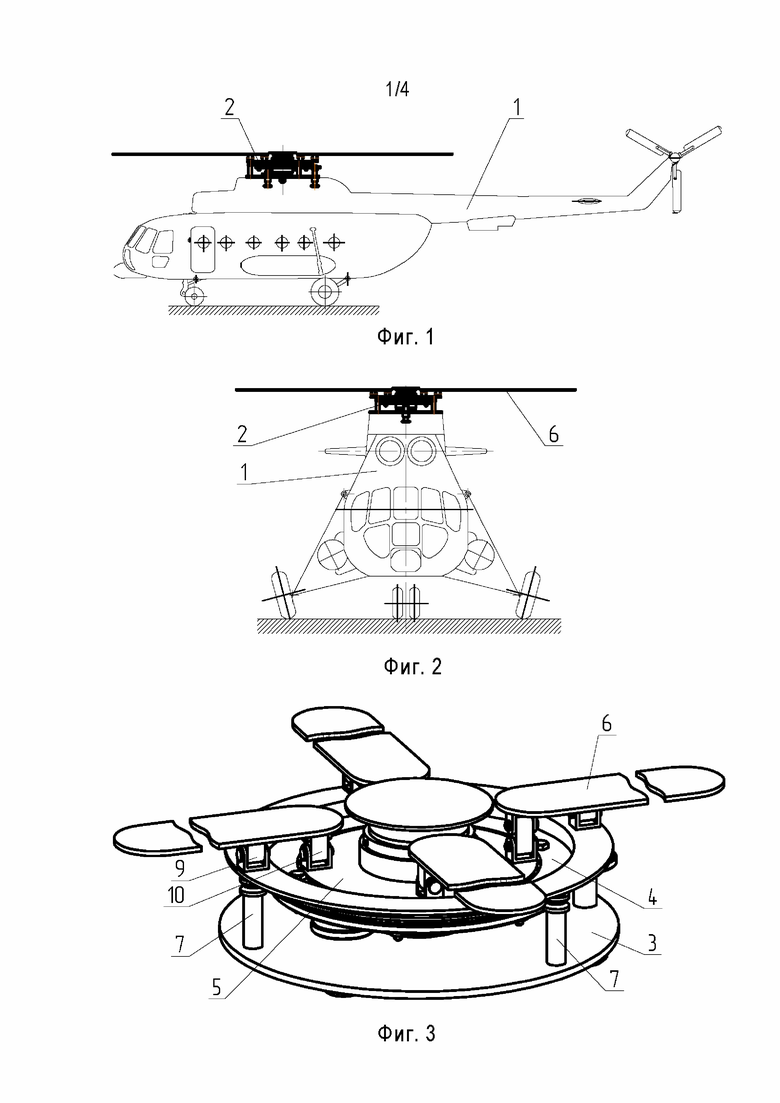
на фиг.1 схематично изображен вертолет, вид сбоку;
на фиг.2 – то же, вид спереди;
на фиг.3 – устройство для управления лопастями в изометрии;
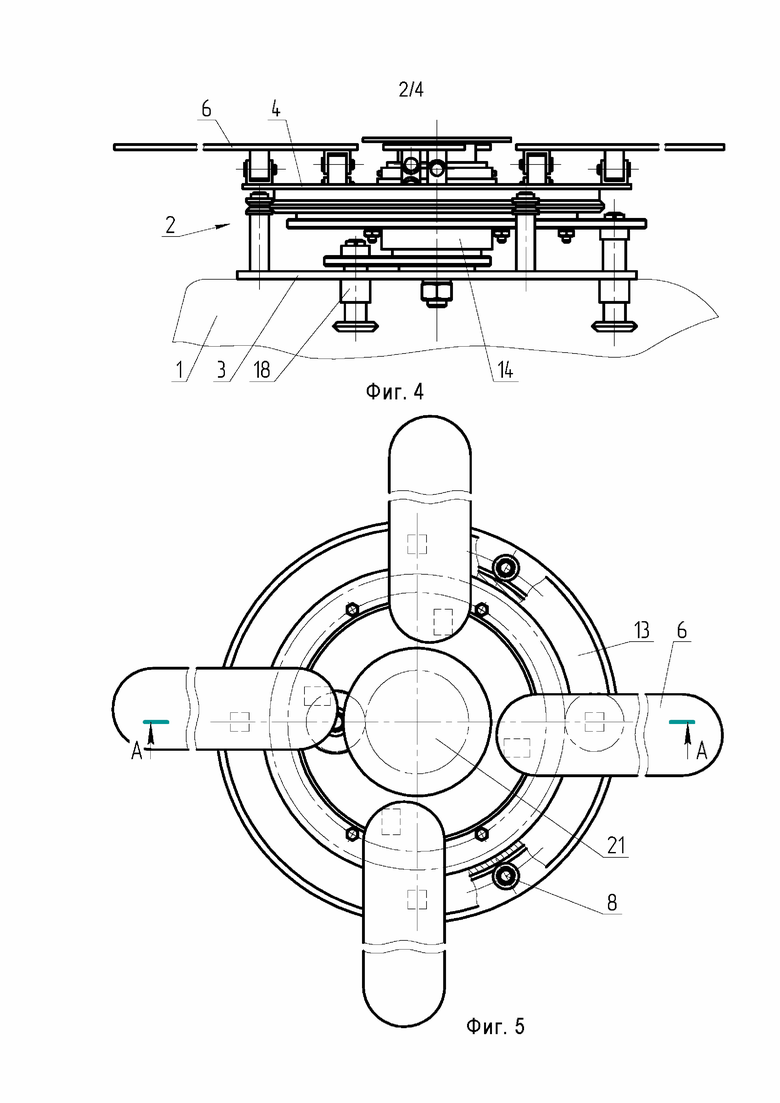
на фиг. 4 – то же, вид сбоку;
на фиг. 5 – то же, вид сверху;
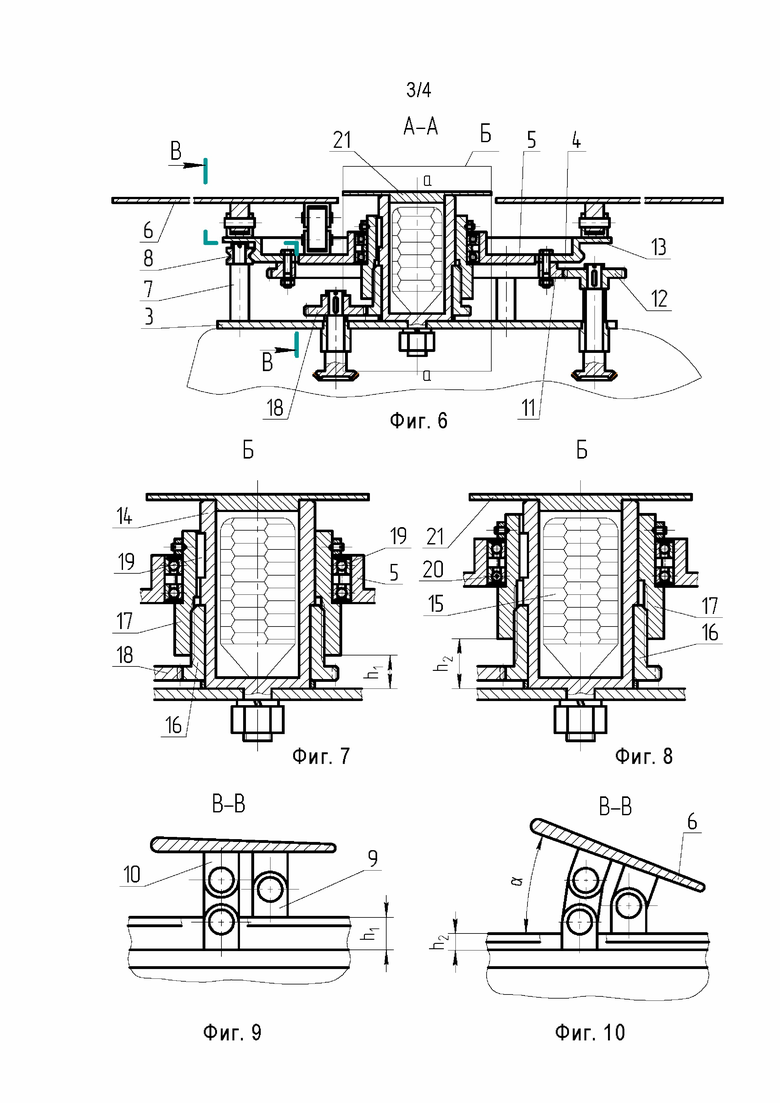
на фиг. 6 - разрез А-А на фиг. 5;
на фиг. 7 – вид Б на фиг. 6 - ведомая платформа в нижнем положении;
на фиг. 8 – вид Б на фиг. 6 - ведомая платформа в верхнем положении;
на фиг. 9 – разрез В-В на фиг. 6 – лопасти в горизонтальном положении;
на фиг. 10 – разрез В-В на фиг. 6 – лопасти в наклонном положении;
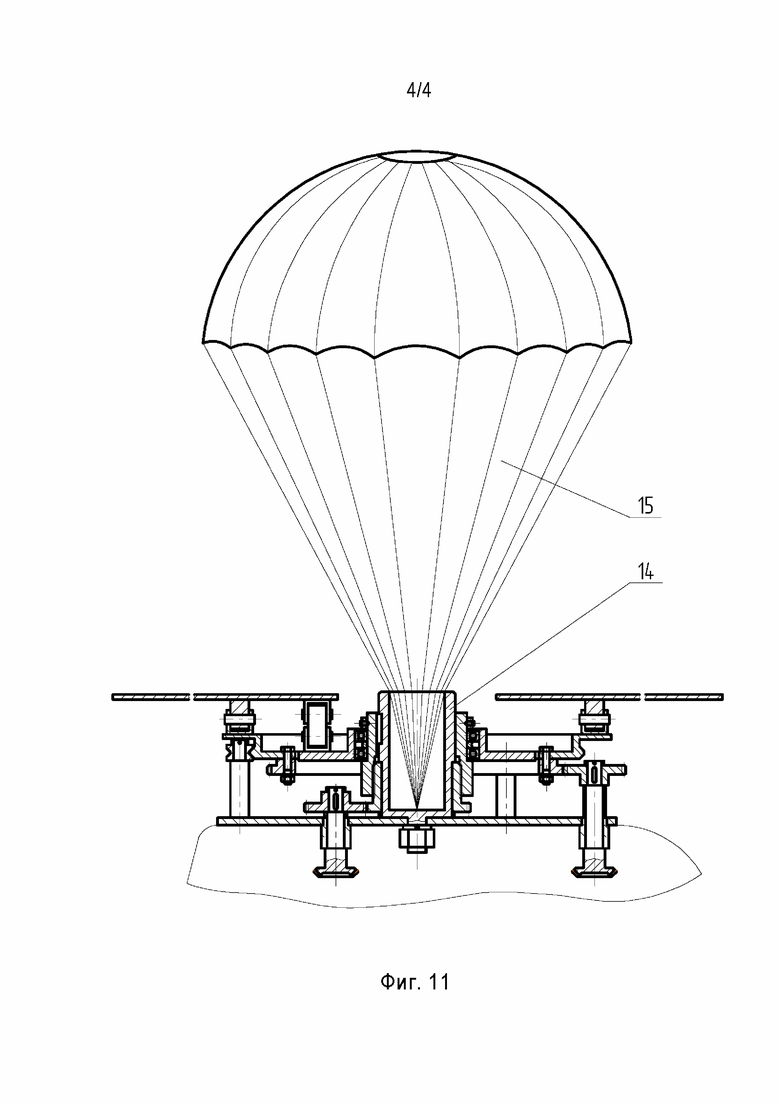
на фиг. 11 – парашютная система безопасности.
Вертолет содержит смонтированное на фюзеляже 1 устройство 2 для управления лопастями, включающее в себя жестко закрепленное на фюзеляже основание 3, соосно установленные кольцеобразные платформы - ведущую 4 и ведомую 5, на которых закреплены лопасти 6 и жестко закрепленные на основании 3 вертикальные стойки 7 с направляющими роликами 8, в которых установлена ведущая кольцеобразная платформа 4 с возможностью вращения от силовой установки вертолета (на чертежах не показана).
Кольцеобразные платформы 4 и 5 установлены с возможностью совместного синхронного вращения от силовой установки вертолета и с возможностью ограниченного вертикального перемещения ведомой кольцеобразной платформы 5 относительно ведущей 4 посредством рулевого привода.
Лопасти 6 разнесены друг от друга от оси вращения а-а, при этом каждая лопасть 6 прикреплена к ведущей 4 и ведомой 5 кольцеобразным платформам посредством шарнирно-рычажных крепежей 9 и 10, разнесенных друг от друга по горизонтали - относительно оси вращения а-а кольцеобразных платформ, и по вертикали, с возможностью поворота в вертикальной плоскости лопастей 6 при вертикальном перемещении ведомой кольцеобразной платформы 5 относительно ведущей кольцеобразной платформы 4.
Шарнирно-рычажные крепежи 9 лопастей 6 к ведущей кольцеобразной платформе 4 и шарнирно-рычажные крепежи 10 лопастей 6 к ведомой кольцеобразной платформе 5 расположены в разных вертикальных плоскостях, проходящих через ось вращения а-а платформ, а расстояние от шарнирно-рычажных крепежей 10 лопастей к ведомой кольцеобразной платформе 5 до оси вращения а-а платформ меньше расстояния от шарнирно-рычажных крепежей 9 лопастей 6 к ведущей кольцеобразной платформе 4 до указанной оси вращения а-а.
Вращение ведущей кольцеобразной платформы 4 обеспечивается шестерней 11 с наружными зубьями. Шестерня 11 жестко прикреплена к платформе 4 и находится в постоянном зацеплении с шестерней 12, которая кинематически связана с силовой установки вертолета.
Ведущая платформа выполнена с расположенной над стойками консольной частью 13, на которой закреплены шарнирно-рычажные крепежи 9.
Основание 3, ведущая 4 и ведомая 5 кольцеобразные платформы расположены в параллельных плоскостях.
Вертолет оборудован парашютным средством безопасности, которое установлено в пространство внутри кольцеобразных платформ 4 и 5, встроено в рулевой привод и содержит корпус в виде жестко закрепленного на основании 3 полого цилиндра 14 и размещенный в полости цилиндра 14 парашют 15 со средствами его крепления и управления, раскрывающийся при аварийной ситуации автоматически или вручную из кабины пилота. Ось цилиндра 14 совпадает с осью вращения а-а кольцеобразных платформ 4,5. Наружная цилиндрическая поверхность цилиндра сопряжена с рулевым приводом посредством двух втулок - нижней 16 и верхней 17, соединенных между собой с помощью резьбы.
Нижняя втулка 16 установлена на цилиндре 14 с возможностью вращения относительно него посредством шестеренчатого привода 18, управляемого из кабины пилота. Верхняя втулка 17 установлена с возможностью ограниченного возвратно-поступательного перемещения вдоль цилиндра 14 по образованным на нем вертикальным направляющим 19.
Ведомая платформа 5 прикреплена к верхней втулке 17 с возможностью вращения относительно нее в подшипниковой опоре 20 и связана с ведущей платформой 4 посредством шарнирно-рычажных крепежей 9 и 10 и лопастей 6, благодаря чему обеспечивается синхронное вращение платформ 4 и 5 от силовой установки вертолета.
Корпус имеет легкосъемную крышку 21, при этом верхняя часть корпуса расположена выше лопастей 6.
Цилиндр 14 расположен внутри ведомой кольцеобразной платформы 5, а последняя – внутри ведущей кольцеобразной платформы 4 на одном уровне с ней или со смещением относительно нее по вертикали - при горизонтально расположенных лопастях 6. В примере конкретного выполнения при горизонтально расположенных лопастях 6 эти платформы расположены на одном уровне (фиг. 6).
Сравнение заявленного технического решения с уровнем техники, известным из научно-технической и патентной документации на дату приоритета, не выявило средство, которому присущи признаки, идентичные всем признакам, содержащимся в заявленной формуле изобретения, т.е., совокупность существенных признаков заявленного решения ранее не была известна и не тождественна каким-либо известным техническим решениям, следовательно, оно соответствует условию патентоспособности "новизна".
Анализ известных технических решений в данной области техники показал, что предложенное техническое решение не следует для специалиста явным образом из уровня техники, поскольку не выявлены решения, имеющие признаки, совпадающие с его отличительными признаками. Т.е. заявленное решение имеет признаки, которые отсутствуют в известных технических решениях, а использование этих признаков в заявленной совокупности существенных признаков дает возможность получить новый технический результат , заключающийся в улучшении эксплуатационных характеристик вертолета с кольцеобразным устройством для управления лопастями. Следовательно, предложенное техническое решение получено путем творческого подхода и неочевидно для среднего специалиста в этой области, т.е. имеет изобретательский уровень по сравнению с существующим уровнем техники.
Данное техническое решение промышленно применимо, поскольку в описании к заявке и названии изобретения указано его назначение, оно может быть изготовлено промышленным способом, работоспособно, осуществимо и воспроизводимо, следовательно, оно соответствует условию патентоспособности "промышленная применимость".
Работает устройство следующим образом.
При вращении в горизонтальной плоскости от силовой установки вертолета, ведущая кольцеобразная платформа 4 приводит во вращение ведомую кольцеобразную платформу 5 через шарнирно-рычажные крепежи 9,10, соединенные с лопастями 6 и с обеими платформами. Вращающиеся платформы 4,5 с закрепленными на них лопастями 6 создают тягу, направленную вверх, выполняя роль подъёмной силы. Когда тяга будет больше веса вертолета, вертолет без разбега оторвется от земли и начнет вертикальный набор высоты.
Поворот лопастей 6 в полете происходит при вертикальном перемещении ведомой кольцеобразной платформы 5 относительно ведущей кольцеобразной платформы 4 посредством рулевого привода, управляемого из кабины пилота, на величину равную h²-h¹. При этом при вращении нижней втулки 16 вокруг цилиндра 14, верхняя втулка 17 перемещается по вертикали по соединяющей их резьбе. Вместе с верхней втулкой 17 по вертикали перемещается присоединенная к ней ведомая платформа 5, воздействуя при перемещении на шарнирно-рычажные крепежи 9,10, обеспечивая поворот лопастей 6 на расчетную величину α.
При возникновении аварийной ситуации, например, при отказе двигателя, парашют 15, размещенный в корпусе, приводится в рабочее положение вручную пилотом. При этом парашют как бы выстреливает из корпуса, выбивая легкосъемную крышку 21. Поскольку верхняя часть корпуса расположена над лопастями 6, вероятность зацепления парашюта за лопасти маловероятна. При критической скорости снижения вертолетом высоты, парашютная система безопасности сработает автоматически.
В заявленной конструкции вертолета с кольцеобразным устройством для управления лопастями, корпус в виде цилиндра выполняет двойную функцию, являясь одним из элементов рулевого привода и емкостью для размещения парашюта, что улучшает эксплуатационные качества и упрощает технологию изготовления.
Расположение корпуса соосно кольцеобразным платформам в освобожденном пространстве внутри них, без выхода за габариты, позволит произвести аварийное приземление вертолета без ухудшения летных характеристик, при горизонтальном его положении, без крена.
Использование заявленного технического решения позволит улучшить эксплуатационные характеристики вертолета с кольцеобразным устройством для управления лопастями путем обеспечения безопасного приземления при аварийной ситуации, без травмирования пилота и пассажиров и без повреждения конструкции вертолета.
Кроме того, расширяется арсенал средств определенного назначения, альтернативного известным решениям.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления лопастями вертолета | 2023 |
|
RU2799165C1 |
| УСТРОЙСТВО СПАСЕНИЯ ВЕРТОЛЕТА | 2003 |
|
RU2246428C2 |
| Летательный аппарат | 1989 |
|
SU1827363A1 |
| АВАРИЙНО-СПАСАТЕЛЬНАЯ СИСТЕМА ВЕРТОЛЕТА | 1998 |
|
RU2162810C2 |
| БЕСПИЛОТНЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ, ДЕСАНТИРУЕМЫЙ С САМОЛЕТА-НОСИТЕЛЯ | 2016 |
|
RU2627975C2 |
| ВЕРТОЛЕТ | 2003 |
|
RU2247680C1 |
| Система безопасного приземления винтокрылого летательного аппарата при остановившемся двигателе | 2023 |
|
RU2823617C1 |
| ВЕРТОЛЕТ | 2000 |
|
RU2213026C2 |
| ПИЛОТИРУЕМЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ С ДОПОЛНИТЕЛЬНЫМ ВОДОРОДНЫМ МОДУЛЕМ | 2014 |
|
RU2571153C1 |
| ВЕРТОЛЕТ | 2000 |
|
RU2213027C2 |
Изобретение относится к области вертолетостроения, а именно к конструкциям спасательных устройств вертолетов. Вертолет оборудован парашютным средством безопасности, которое встроено в рулевой привод в пространство внутри кольцеобразных платформ (4,5) и включает в себя жестко закрепленный на основании корпус в виде полого цилиндра (14), ось которого совпадает с осью вращения кольцеобразных платформ (4,5), размещенный в полости цилиндра парашют (15), раскрывающийся при аварийной ситуации автоматически или вручную из кабины пилота. При этом наружная боковая поверхность цилиндра (14) сопряжена с рулевым приводом посредством нижней (16) и верхней (17) втулок, соединенных между собой с помощью резьбы. Нижняя втулка (16) установлена на цилиндре (14) с возможностью вращения относительно него. Верхняя втулка (17) установлена с возможностью ограниченного возвратно-поступательного перемещения относительно нижней втулки (16) вдоль цилиндра (14), а ведомая платформа 5 прикреплена к верхней втулке 17 с возможностью вращения относительно нее в подшипниковой опоре. Обеспечивается безопасное приземление при аварийной ситуации без травмирования пилота и пассажиров, без повреждения конструкции вертолета. 7 з.п. ф-лы, 11 ил. 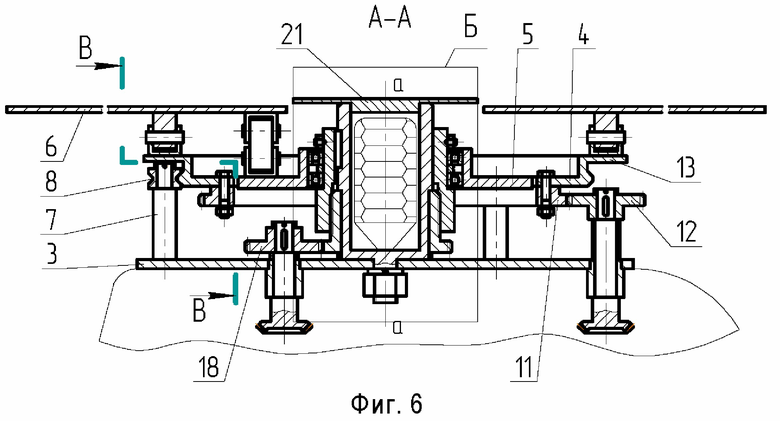
1. Вертолет, содержащий смонтированное на фюзеляже кольцеобразное устройство для управления лопастями вертолета, включающее в себя:
- жестко закрепленное на фюзеляже основание,
- соосно установленные ведущую и ведомую кольцеобразные платформы, на которых закреплены лопасти, и
- жестко закрепленные на основании вертикальные стойки с направляющими роликами, в которых установлена ведущая кольцеобразная платформа с возможностью вращения от силовой установки вертолета, при этом
ведомая кольцеобразная платформа установлена с возможностью ограниченного вертикального перемещения ведомой кольцеобразной платформы относительно ведущей посредством рулевого привода и с возможностью совместного синхронного вращения с ведущей кольцеобразной платформой,
лопасти разнесены друг от друга от оси вращения, а
каждая лопасть прикреплена к ведущей и ведомой кольцеобразным платформам посредством шарнирно-рычажных крепежей, разнесенных друг от друга по горизонтали, относительно оси вращения кольцеобразных платформ, и по вертикали, с возможностью поворота в вертикальной плоскости лопастей при вертикальном перемещении ведомой кольцеобразной платформы относительно ведущей кольцеобразной платформы,
отличающийся тем, что вертолет оборудован парашютным средством безопасности, которое встроено в рулевой привод в пространство внутри кольцеобразных платформ и включает в себя жестко закрепленный на основании корпус в виде полого цилиндра, ось которого совпадает с осью вращения кольцеобразных платформ, и размещенный в полости цилиндра парашют, раскрывающийся при аварийной ситуации автоматически или вручную из кабины пилота, при этом наружная боковая поверхность цилиндра сопряжена с рулевым приводом посредством двух втулок - нижней и верхней, соединенных между собой с помощью резьбы, причем нижняя втулка установлена на цилиндре с возможностью вращения относительно него посредством шестеренчатого привода, управляемого из кабины пилота, верхняя втулка установлена с возможностью ограниченного возвратно-поступательного перемещения относительно нижней втулки вдоль цилиндра, а ведомая платформа прикреплена к верхней втулке с возможностью вращения относительно нее в подшипниковой опоре.
2. Вертолет по п. 1, отличающийся тем, что шарнирно-рычажные крепежи лопастей к ведущей кольцеобразной платформе и шарнирно-рычажные крепежи лопастей к ведомой кольцеобразной платформе расположены в разных вертикальных плоскостях, проходящих через ось вращения платформ, а расстояние от шарнирно-рычажных крепежей лопастей к ведомой кольцеобразной платформе до оси вращения платформ меньше расстояния от шарнирно-рычажных крепежей лопастей к ведущей кольцеобразной платформе до указанной оси вращения.
3. Вертолет по п. 1, отличающийся тем, что основание и верхняя и нижняя кольцеобразные платформы расположены в параллельных плоскостях.
4. Вертолет по п. 1, отличающийся тем, что к ведущей кольцеобразной платформе жестко прикреплена шестерня с наружными зубьями, кинематически связанная с силовой установкой вертолета.
5. Вертолет по п. 1, отличающийся тем, что ведущая кольцеобразная платформа выполнена с расположенной над стойками консольной частью, на которой закреплены шарнирно-рычажные крепежи лопастей.
6. Вертолет по п. 1, отличающийся тем, что на цилиндре выполнены вертикальные направляющие с возможностью перемещения по ним верхней втулки.
7. Вертолет по п. 1, отличающийся тем, что корпус имеет съемную крышку.
8. Вертолет по п. 1, отличающийся тем, что верхняя часть корпуса расположена над лопастями.
| Устройство для управления лопастями вертолета | 2023 |
|
RU2799165C1 |
| НЕСУЩИЙ ВИНТ ВЕРТОЛЕТА | 2015 |
|
RU2616771C2 |
| US 4709881 A1, 01.12.1987 | |||
| "Безопасный Zefhir: вертолет с парашютной системой спасения", найдено в интернет онлайн, https://strangernn.livejournal.com/1948325.html, опубликовано 12.07.2019 | |||
| CN 204096089 U, 14.01.2015 | |||
| БЕСПИЛОТНЫЙ ВЫСОКОСКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2653953C1 |

