Изобретение относится к воздушному транспорту, к вертолетам.
Известны несущие винты, применяемые на отечественных и зарубежных вертолетах. (1. Пелишенко В.А. и др. Основы теории полета вертолета / Под ред. С.Х. Атабеняна и А.А. Касаткина. М.: Воениздат, 1967. - 206 с. 2. Вертолеты стран мира / Под ред. В.Г. Лебедя. - АО «Редакция журнала «Бумеранг» при участии фирмы «Апрель», 1994. - 224 с.).
Эти несущие винты ограничивают эксплуатационные характеристики вертолета (1. с. 12, рис. 0.14; 2. с. 12. рис. 12), так как лопасти несущего винта занимают большие габариты, не позволяющие транспортировать вертолеты другими видами транспорта, не обеспечивают возможность безопасного катапультирования экипажа вверх и защиту верхней сферы от нападения противника.
Наиболее близким к предлагаемому устройству является несущий винт вертолета, содержащий вал, втулку с лопастями и автомат перекоса угла установки лопастей.
Автомат перекоса имеет ползун, который может перемещаться вверх и вниз по валу привода. Для перемещения ползуна служит рычаг «шаг-газ», соединенный с ним при помощи тяг и качалки (1. рис. 1.69. с. 98). На ползуне устанавливается универсальный шарнир, который имеет два кольца: внутреннее и наружное. Универсальный шарнир (шарнир Гука) связан с ручкой управления (ручка циклического шага). При отклонении ручки летчик, воздействуя на внешнее кольцо, имеет возможность наклонять его относительно двух взаимно перпендикулярных осей «вперед-назад» и «влево-вправо». При помощи шарикового подшипника к внешнему кольцу шарнира крепится тарелка автомата перекоса. Тарелка состоит из вращающегося кольца с рычагами, к которым крепятся тяги, связанные с поводками осевых шарниров лопастей. Тарелка автомата перекоса приводится во вращение двухзвенником, одно звено которого связано с вращающимся кольцом, а второе - с валом несущего винта. Отклонение рычага «шаг-газ» вверх или вниз приводит соответственно к увеличению или уменьшению установочных углов всех лопастей на одинаковую величину, что изменяет величину силы тяги несущего винта. При наклоне тарелки автомата перекоса обеспечивается циклическое изменение шага, т.е. изменение угла установки лопастей в течение одного цикла (одного оборота) - лопасть начнет совершать маховые движения. Таким образом, наклон тарелки автомата перекоса вызывает наклон плоскости вращения несущего винта, а значит и наклон силы тяги несущего винта при сохранении его величины. Наклон плоскости вращения винта отстает от циклического изменения шага, поэтому необходим так называемый угол опережения автомата перекоса, который зависит от упругости и инерционности лопасти, определяемой массовой характеристикой, а также от угла характеристики компенсации взмаха и угла выноса (1. с. 98-102; рис. 1.69-1.72).
Недостаток описанной конструкции несущего винта заключается в том, что она ограничивает эксплуатационные характеристики вертолета - сложность условий транспортировки вертолета другими видами транспорта из-за больших габаритов лопастей несущего винта; снижает его живучесть, так как не обеспечивает защиту верхней сферы от нападения противника и возможность безопасного катапультирования экипажа вверх. При такой конструкции втулки несущего винта катапультирование экипажа возможно только вниз, что небезопасно при малой высоте полета.
Задача, на решение которой направлено заявляемое изобретение, заключается в расширении эксплуатационных характеристик вертолета.
Поставленная задача решается улучшением условий транспортировки вертолета другими видами транспорта за счет уменьшения поперечных размеров, повышения живучести вертолета путем защиты верхней сферы от нападения противника и возможности безопасного катапультирования экипажа вверх.
Сущность предлагаемого устройства заключается в том, что несущий винт вертолета содержит лопасти, втулку, автомат перекоса, при этом кольцевая втулка несущего винта с автоматом перекоса установлена на трубчатом люке, она имеет два противоположно развернутых кронштейна, в каждом кронштейне наконечники двух лопастей с общей опорой скольжения расположены соосно в цилиндрической опоре, наконечник третьей лопасти установлен подвижно на оси в торце цилиндрической опоры с ограничителем поворота этой лопасти.
Предлагаемое техническое решение позволяет обеспечить улучшение условий транспортировки вертолета другими видами транспорта за счет уменьшения поперечных размеров при повороте третьей лопасти каждого кронштейна в продольное положение; организовать трубчатый люк, который можно использовать для безопасного катапультирования экипажа вверх, в котором могут быть расположены аварийный парашют для вертолета в целом, средства защиты от нападения противника: ракеты «воздух-воздух», автоматическая пушка, пулемет, локатор и т.п.
На фиг. 1 изображена принципиальная схема расположения лопастей ведущего винта. Крышка люка и элементы фюзеляжа не показаны. Сплошными линиями обозначены продольные лопасти в рабочем и транспортном состояниях; третья лопасть - в транспортном состоянии, пунктирными линиями - положение третьей лопасти в рабочем состоянии.
На фиг. 2 показан вид сбоку на это устройство.
На фиг. 3 приведен фрагмент фиг. 1 - укрупненный вид втулки несущего винта с кронштейнами установки лопастей.
На фиг. 4 представлен поперечный разрез кронштейна фиг. 3 с осью фиксации третьей лопасти в цилиндрической опоре.
На фиг. 5 изображен продольный разрез кронштейна фиг. 3 с осью фиксации третьей лопасти. Сплошные линии - лопасть в рабочем состоянии, пунктирные - в транспортном. Также в разрезе показаны наконечники соосных лопастей в цилиндрической опоре.
На фиг. 6 приведен поперечный разрез кронштейна фиг. 3 с наконечниками соосных лопастей в цилиндрической опоре.
На фиг. 7 справа представлен разрез кронштейна фиг. 3. В левой части показан вертикальный паз фиг. 6, в правой - наконечник от фиг. 5, торцы оси наконечника расположены в пазах фиг. 4.
Трубчатый люк 1 несущей системы вертолета имеет кольцевую опору 2 (фиг. 1, 2 и др.). Кольцевая втулка 3 расположена под кольцевой опорой 2 и закреплена на трубчатом валу 4 с венцом 5 зубчатой передачи. На кольцевой втулке 3 закреплены два противоположно-развернутых кронштейна 6 с цилиндрическими опорами 7 (фиг. 4-7). Кронштейны 6 могут быть составными - например, корпус и нижняя или боковая крышка. В каждой цилиндрической опоре 7 расположены наконечники 8 и 9 соосных лопастей 10 и 11. В кронштейнах 6 выполнены вертикальные пазы для наконечников 8 и 9, которые имеют общую опору скольжения 12, наконечники оснащены буртиками 13 и фиксаторами 14, например гайками, и зафиксированы в продольном направлении в цилиндрической опоре 7 (фиг. 6). В пазу цилиндрической опоры 7 на оси 15 подвижно установлен наконечник 16 третьей лопасти 17 (фиг. 4, 5, 7). Торцы оси 15 расположены в пазах кронштейнов 6 (фиг. 4), которые оснащены ограничителями 18 поворота наконечников 16 (фиг. 1, 5). Рычаги 19 лопастей 17 тягами 20 связаны с автоматом перекоса 21 (органы управления автоматом не показаны). Рычаги 19 соосных лопастей 10, 11 тягами 20 соединяются балансиром 22, середина которого установлена в опоре качания 23 (фиг. 2, 3) дополнительной тягой 24 связаны с автоматом перекоса 21. Цилиндрические опоры 7 рычагами 25 и тягами 26 также связаны с автоматом перекоса 21 (фиг. 2, 4). Ведущая шестерня 27 зацеплена с венцом 5 зубчатой передачи, которая конической зубчатой передачей 28 (фиг. 2) соединена с ведущим валом 29 двигателя (двигатель не показан). Цилиндрическая (27-5) и коническая передачи 28 могут поменяться местами. Лопасти 11 и 17 могут иметь гибкую связь 30 с поводком 31.
Предлагаемое техническое устройство работает следующим образом.
В транспортном положении или для хранения в ангаре путем уменьшения поперечного размера вертолета лопасти 17 надо сместить к лопастям 11 (фиг. 1). Для этой операции можно поводками 31 сместить среднюю часть гибкой связи 30 к центру несущего винта, при этом лопасть 17 будет поворачиваться к лопасти 11 (от пунктирного изображения к сплошным линиям). Возможно перемещение лопастей 17 вручную. При вращении кольцевой втулки 3 несущего винта за счет аэродинамического сопротивления воздуха лопасти 17 с наконечниками 16 повернутся в цилиндрической опоре 7 на оси 15 и переместятся от соосных лопастей 11 перпендикулярно к ним (фиг. 1, 3, 5). Угол поворота лопасти 17 ограничивается фиксатором 18, а также гибкой связью 30. От двигателя, установленного на несущей системе с трубчатым люком 1, крутящий момент по ведущему валу 29 конической передачей 28 и ведущей шестерней 27 передается на венец 5 зубчатой передачи, трубчатый вал 4, кольцевую втулку 3, кронштейны 6, цилиндрические опоры 7, наконечники 8, 9, 16 и лопасти 10, 11, 17 несущего винта, вращая их (фиг. 1, 3). Фиксаторы 14 буртиками 13 удерживают наконечники 8 и 9 соосных лопастей 10 и 11 в цилиндрической опоре. Дополнительная фиксация обеспечивается боковыми поверхностями вертикальных пазов в кронштейнах 6 (фиг. 6, 7). Летчик отклонением рычага «шаг-газ» вверх или вниз (не показан) воздействует на автомат перекоса 21, который через тягу 24, балансиры 22, тяги 20 и рычаги 19 регулирует положение соосных лопастей 10 и 11 относительно кронштейнов 6 кольцевой втулки 3. Балансиры 22 поворачиваются относительно опоры качания 23 и обеспечивают изменение угла наклона лопастей на одинаковые углы, при этом соосные лопасти 10 и 11 с наконечниками 8 и 9 поворачиваются относительно друг друга в опоре скольжения 12 (фиг. 6). Лопасти 17 с наконечниками 16 и осями 15 вместе с цилиндрическими опорами 7 поворачиваются в кронштейнах 6 (фиг. 7) от автомата перекоса 21 тягами 20 и рычагами 19 (фиг. 2). Допускается совмещение поворота всех лопастей присоединением тяг 20 лопастей 17 непосредственно к балансирам 22, но рычаги 19 надо передвинуть вперед по ходу вращения лопасти 17. Поворот лопастей 10, 11 и 17 относительно их осей изменяет силу тяги несущего винта. Сила тяги от лопастей 10, 11, 17 и наконечников 8, 9, 16 несущего винта передается на кронштейны 6, кольцевую втулку 3, от нее на кольцевую опору 2 и трубчатый люк 1, который передает это усилие на несущую систему вертолета. При наклоне тарелки автомата перекоса 21 относительно трубчатого вала 4 привода кольцевой втулки 3 тягами 26 и рычагами 25 обеспечивается поворот цилиндрических опор 7 в кронштейнах 6 (фиг. 2, 4). При этом происходит наклон наконечников 8, 9, 16 и лопастей 10, 11, 17 несущего винта. При наклоне тарелки автомата перекоса обеспечивается циклическое изменение шага, т.е. изменение угла установки лопастей в течение одного цикла (одного оборота) - лопасть начнет совершать маховые движения. Таким образом, наклон тарелки автомата перекоса вызывает наклон плоскости вращения несущего винта, а значит и наклон силы тяги несущего винта при сохранении его величины.
Обозначения:
1 - трубчатый люк несущей системы (фюзеляжа) вертолета;
2 - кольцевая опора втулки несущего винта;
3 - кольцевая втулка лопастей несущего винта;
4 - трубчатый вал привода втулки 3;
5 - венец зубчатой передачи;
6 - кронштейн кольцевой втулки 3;
7 - цилиндрическая опора, расположенная в кронштейне 6;
8, 9 - наконечники соосных лопастей несущего винта;
10, 11 - соосные лопасти несущего винта;
12 - опора скольжения наконечников 8 и 9 лопастей 10 и 11;
13 - буртики наконечников 8 и 9;
14 - фиксаторы, например гайки, в цилиндрической опоре 7;
15 - ось в цилиндрической опоре 7;
16 - наконечник третьей лопасти;
17 - третья лопасть;
18 - ограничитель поворота наконечника 16;
19 - рычаги лопастей к тягам автомата перекоса;
20 - тяги от рычагов 19 к автомату перекоса;
21 - автомат перекоса (упрощенное изображение);
22 - балансир от тяг 20 соосных лопастей 10 и 11;
23 - опора качания балансира 22;
24 - дополнительная тяга от балансира 23 к автомату перекоса 21;
25 - рычаг цилиндрической опоры 7;
26 - тяга от рычага 25 к автомату перекоса 21;
27 - ведущая шестерня к венцу 5 зубчатой передачи;
28 - коническая зубчатая передача;
29 - ведущий вал двигателя;
30 - гибкая связь между лопастями 11 и 17;
31 - поводок от гибкой связи 30.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСМИССИЯ ВЕРТОЛЕТА | 2014 |
|
RU2580344C2 |
| НЕСУЩИЙ ВИНТ | 2005 |
|
RU2296697C1 |
| ВЕРТОЛЕТ | 2016 |
|
RU2629731C1 |
| ПРИВОДНАЯ СИСТЕМА НЕСУЩИХ ВИНТОВ | 2013 |
|
RU2641396C2 |
| Летательный аппарат | 1989 |
|
SU1827363A1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЕРТОЛЕТОМ СООСНОЙ СХЕМЫ | 2021 |
|
RU2763198C1 |
| СУММИРУЮЩИЙ МЕХАНИЗМ ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ОБЩИМ И ЦИКЛИЧЕСКИМ ШАГОМ ВЕРТОЛЕТОВ ТРЕХТОЧЕЧНОЙ СИСТЕМЫ УПРАВЛЕНИЯ С НАКЛОННЫМ РАСПОЛОЖЕНИЕМ ГИДРОПРИВОДОВ | 2014 |
|
RU2578706C1 |
| ВЕРТОЛЕТ С СООСНЫМИ НЕСУЩИМИ ВИНТАМИ | 2004 |
|
RU2265554C1 |
| СТЕНД ДЛЯ ИСПЫТАНИЙ ШЛИЦ-ШАРНИРА АВТОМАТА ПЕРЕКОСА ВЕРТОЛЕТА | 2021 |
|
RU2764324C1 |
| СКОРОСТНОЙ ВЕРТОЛЕТ | 1992 |
|
RU2005656C1 |

Изобретение относится к области авиации, в частности к конструкциям несущих винтов летательных аппаратов. Несущий винт вертолета содержит лопасти, втулку, автомат перекоса. Кольцевая втулка несущего винта с автоматом перекоса установлена на трубчатом люке, имеет два противоположно развернутых кронштейна. В каждом кронштейне наконечники двух лопастей с общей опорой скольжения расположены соосно в цилиндрической опоре. Наконечник третьей лопасти установлен подвижно на оси в торце цилиндрической опоры с ограничителем поворота этой лопасти. Достигается уменьшение поперечных размеров при повороте третьей лопасти каждого кронштейна в продольное положение. 7 ил.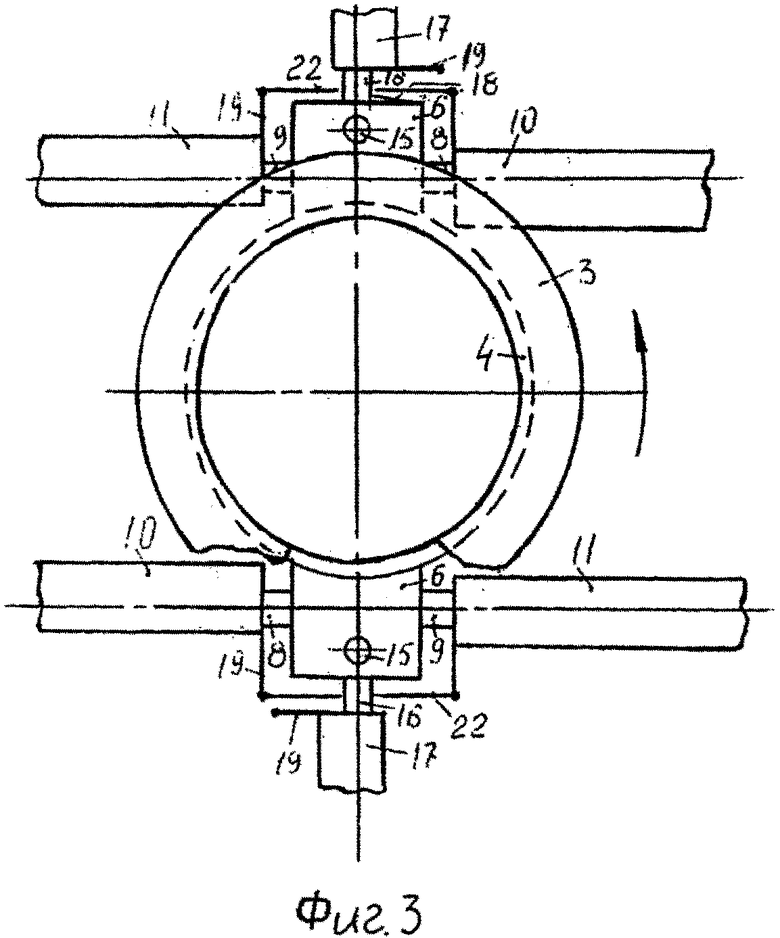
Несущий винт вертолета, содержащий лопасти, втулку, автомат перекоса, отличающийся тем, что кольцевая втулка несущего винта с автоматом перекоса установлена на трубчатом люке, она имеет два противоположно развернутых кронштейна, в каждом кронштейне наконечники двух лопастей с общей опорой скольжения расположены соосно в цилиндрической опоре, наконечник третьей лопасти установлен подвижно на оси в торце цилиндрической опоры с ограничителем поворота этой лопасти.
| CN 204096089 U, 14.01.2015 | |||
| Устройство для учета работы экскаватора | 1959 |
|
SU126679A1 |
| US 20072015749 A1, 20.09.2007 | |||
| US 4407633 A, 04.10.1983 | |||
| ВОЗДУШНЫЙ ВИНТ С АВТОМАТИЧЕСКИ РАСКЛАДЫВАЮЩИМИСЯ И ПОВОРОТНЫМИ ЛОПАСТЯМИ | 2010 |
|
RU2456206C2 |

