Изобретение относится к области вертолетостроения, а именно, к конструкции приводов управления лопастями вертолета-вращения и поворота в вертикальной плоскости. Изобретение применимо не только к вертолетам, но и к другим винтокрылым аппаратам.
Из уровня техники известны многолопастные вертолеты с центральной несущей осью, на которой установлены лопасти, управляемые рулевым приводом (патенты на изобретения РФ № 2494013, МПК В64С27/04, 2013 г., № 2363620 МПК В64С27/54, 2009 г., № 2361780, МПК В64С27/605, 2009 г.).
В известных конструкциях центральная несущая ось испытывает большие нагрузки от центробежной силы, возникающей при его вращении, в связи с чем узлы, соединяющие несущую ось с лопастями имеют усложненную конструкцию. Лопасти, прикрепленные к несущей оси, при воздействии на них центробежной силы имеют отставание от вращения оси винта в своем крепеже, нагружая всю конструкцию вертолета, влияя на управляемость, вызывая повышенную вибрацию, снижая тем самым эксплуатационную надежность. Кроме того, у известных конструкций существует явление тангажа -серьезная разница сил на правой и левой стороне винта, создающая переворачивающий момент.
Техническое решение по патенту № 2363620 принято за прототип.
Задачей заявленного технического решения является устранение указанных недостатков за счет создания летательного аппарата без центральной несущей оси, в котором лопасти закреплены подвижными крепежами на кольцеобразных плоских платформах, соединенных друг с другом с возможностью синхронного вращения, одна их которых является приводной, а вторая - подвижная по вертикали относительно первой.
Предлагаемая кольцевидная конструкция разгружает машину от увеличенных центробежных нагрузок при отсутствии центральной несущей оси, появляется возможность увеличения крыла-лопасти в своей площади; лопасти выполняют работу подъемной силы с меньшим числом оборотов от силовой установки вертолета. Таким образом, явление тангажа будет иметь меньшее (сниженное) значение и машина в полете будет легче управляема, снизится аварийность и при увеличенном количестве лопастей.
Технический результат заявленного конструктивного решения заключается в улучшении эксплуатационных характеристик вертолета.
Указанный технический результат достигается за счет того, что устройство для управления лопастями вертолета, содержащее привод вращения лопастей и привод поворота лопастей в вертикальной плоскости, включает в себя жестко закрепленное на фюзеляже основание, две соосно размещенные кольцеобразные платформы - верхняя и нижняя, на которых закреплены лопасти, и жестко закрепленные на основании вертикальные стойки с направляющими роликами, в которых установлена с возможностью вращения нижняя кольцеобразная платформа. Последняя выполнена в виде шестерни с внутренними зубьями, находящимися в постоянном зацеплении с шестерней, кинематически связанной с силовой установкой вертолета. Верхняя кольцеобразная платформа соединена с нижней кольцеобразной платформой с возможностью совместного синхронного вращения от силовой установки вертолета, и с возможностью ограниченного вертикального перемещения относительно нижней кольцеобразной платформы посредством рулевого привода. Лопасти разнесены друг от друга от оси вращения, а каждая лопасть прикреплена к верхней и нижней платформам посредством двух шарнирно-рычажных крепежей, разнесенных друг от друга по горизонтали относительно оси вращения платформ и по вертикали, с возможностью поворота в вертикальной плоскости лопастей при перемещении верхней кольцеобразной платформы относительно нижней кольцеобразной платформы.
При этом, к нижней поверхности верхней кольцеобразной платформы жестко прикреплены вертикальные направляющие 14, размещенные с возможностью скольжения в отверстиях, выполненных в нижней кольцеобразной платформе, а основание выполнено кольцеобразным, с центральной подшипниковой опорой.
Крепежи лопастей к верхней кольцеобразной платформе и крепежи лопастей к нижней кольцеобразной платформе расположены в разных вертикальных плоскостях, проходящих через ось вращения платформ, а расстояние от крепежей лопастей к верхней кольцеобразной платформе до оси вращения платформ меньше расстояния от крепежей лопастей к нижней кольцеобразной платформе до указанной оси вращения.
Основание, верхняя и нижняя кольцеобразные платформы расположены в параллельных плоскостях, а верхняя кольцеобразная платформа выполнена с центральной подшипниковой опорой, расположенной соосно с центральной подшипниковой опорой основания.
Рулевой привод включает в себя управляемый из кабины пилота проходящий через подшипниковую опору основания винт, находящийся в постоянном зацеплении с ответной внутренней резьбой гайки, со стабилизирующими стержнями, которые установлены в отверстиях, выполненных в основании, при этом гайка сопряжена с центральной подшипниковой опорой верхней платформы.
При этом лопасти разнесены друг от друга от оси вращения на расстояние соразмерное с 1/3 длины одной лопасти, а все упомянутые центральные подшипниковые опоры выполнены в виде подшипников скольжения.
Устройство иллюстрируется чертежами, где:
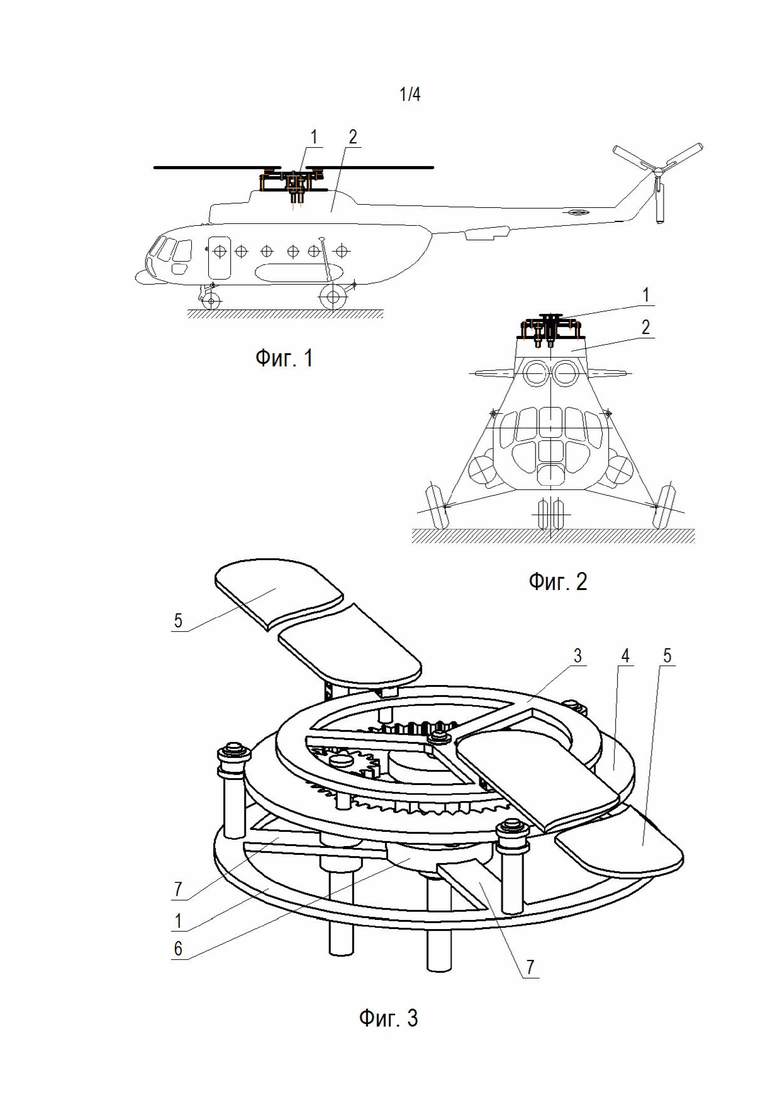
на фиг.1 схематично изображено устройство для управления лопастями вертолета, смонтированное на вертолете, вид сбоку;
на фиг.2 -то же, вид спереди;
на фиг.3 - устройство в изометрии;
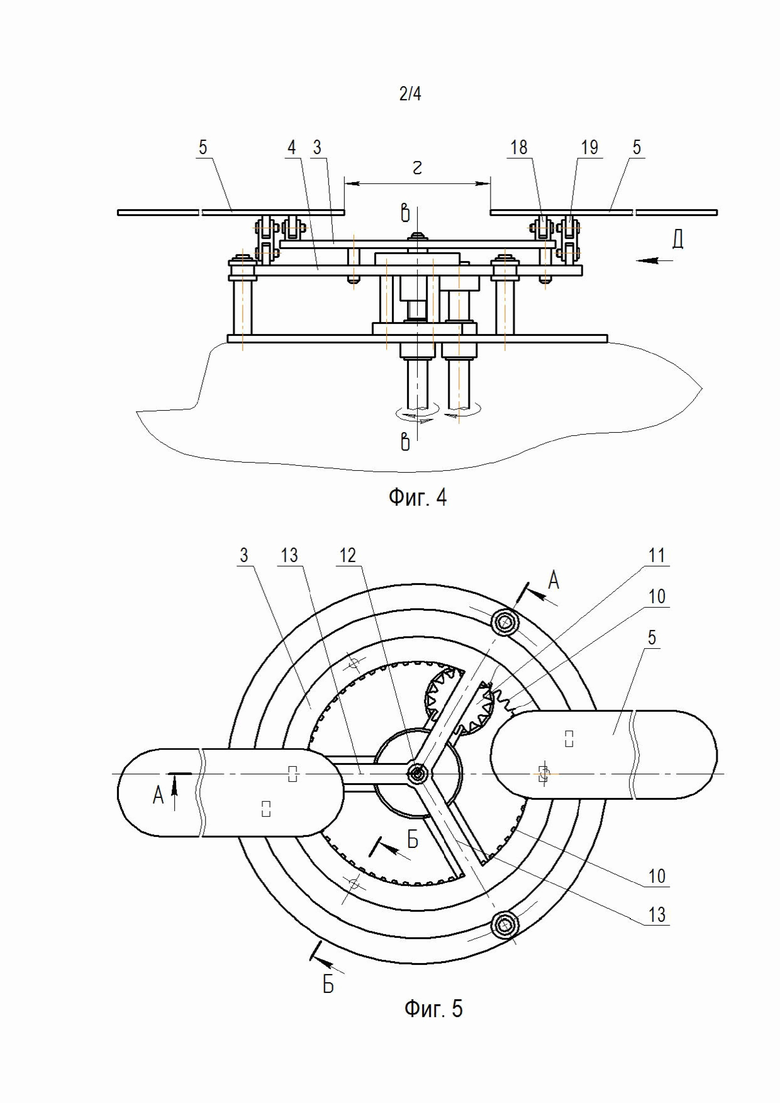
на фиг. 4 - то же, вид сбоку;
на фиг. 5 - то же, вид сверху;
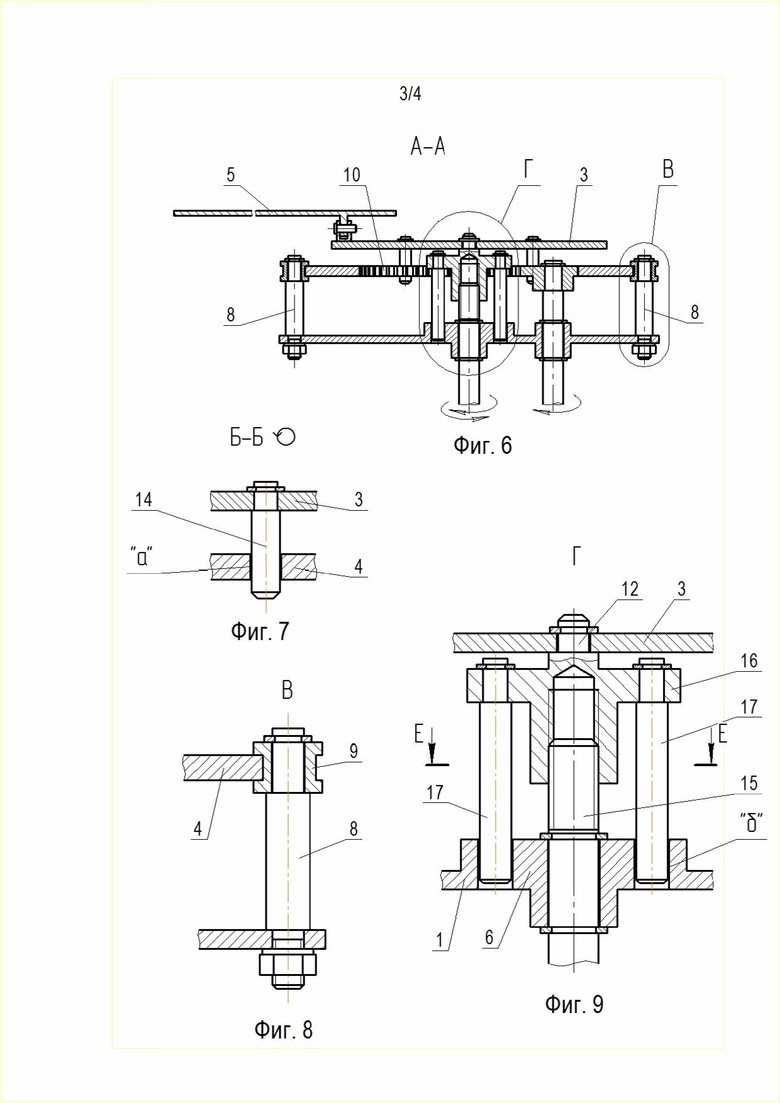
на фиг. 6 - разрез А- А на фиг. 5;
на фиг. 7 - разрез Б-Б на фиг. 5;
на фиг. 8 - вид В на фиг. 6;
на фиг. 9 - вид Г на фиг. 6;
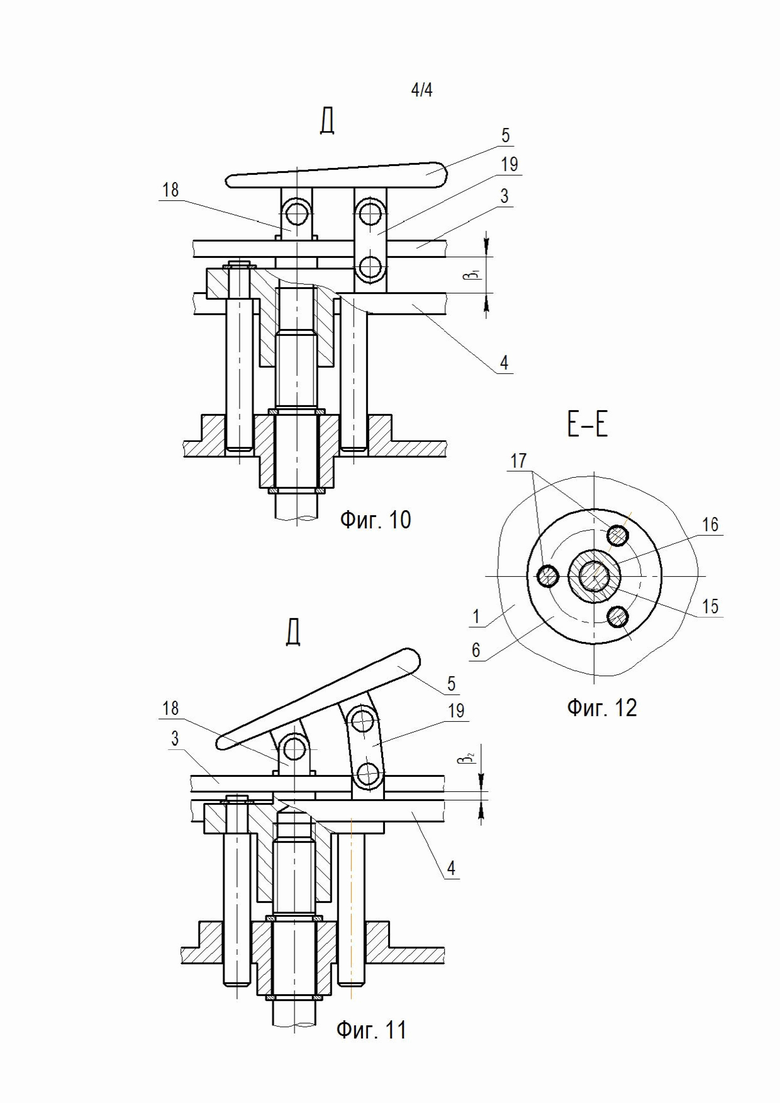
на фиг. 10 - вид Д на фиг. 4, с горизонтально расположенной лопастью;
на фиг. 11 - то же, с наклонно расположенной лопастью;
на фиг. 12 - разрез Е-Е на фиг. 9.
Устройство содержит основание 1, жестко закрепленное на фюзеляже 2, и две соосно размещенные кольцеобразные платформы - верхняя 3 и нижняя 4, с закрепленными на них лопастями 5. Основание 1 и платформы 3,4 расположены в параллельных плоскостях.
Основание 1 выполнено кольцеобразным с центральной подшипниковой опорой 6, жестко соединенной с основанием 1 жесткими связями 7.
На основании 1 жестко закреплены вертикальные стойки 8 с направляющими роликами 9, в которых установлена с возможностью вращения нижняя кольцеобразная платформа 4, выполненная в виде шестерни 10 с внутренними зубьями, находящимися в постоянном зацеплении с шестерней 11, которая кинематически связана с приводом ее вращения - силовой установкой вертолета (на чертежах не показано).
Верхняя кольцеобразная платформа 3 выполнена с центральной подшипниковой опорой 12, соединенной с верхней кольцеобразной платформой 3 жесткими связями 13. Центральная подшипниковая опора 12 расположена соосно с центральной подшипниковой опорой 6 основания 1.
Верхняя кольцеобразная платформа 3 соединена с нижней кольцеобразной платформой 4 с возможностью синхронного вращения от силовой установки вертолета (на чертежах не показана) посредством вертикальных направляющих 14, жестко прикрепленных к нижней поверхности верхней кольцеобразной платформы 3 и размещенных с возможностью скольжения в отверстиях «а», выполненных в нижней кольцеобразной платформе 4. Кроме того, верхняя кольцеобразная платформа 3 установлена с возможностью ограниченного вертикального перемещения относительно нижней кольцеобразной платформы 4 посредством рулевого привода по вертикальным направляющим 14.
Рулевой привод содержит управляемый из кабины пилота винт 15, установленный в центральной подшипниковой опоре 6 основания 1 и находящийся в постоянном зацеплении с ответной внутренней резьбой гайки 16 со стабилизирующими стержнями 17, которые установлены с возможностью ограниченного вертикального перемещения - скольжения - в ответных отверстиях «б», выполненных в основании 1. Гайка 16 сопряжена с центральной подшипниковой опорой 12 верхней кольцеобразной платформы 3.
Лопасти 5 разнесены друг от друга от оси в-в вращения платформ 3,4, преимущественно, на расстояние «г», соразмерное с 1/3 длины одной лопасти 5.
Каждая лопасть 5 крепится к верхней и нижней кольцеобразным платформам 3, 4 посредством двух шарнирно-рычажных крепежей 18,19, разнесенных друг от друга по горизонтали относительно оси в-в и по вертикали с возможностью поворота лопастей 5 при перемещении верхней кольцеобразной платформы 3 относительно нижней 4.
Крепежи 18, 19 лопастей 5 к верхней кольцеобразной платформе 3 и крепежи лопастей 5 к нижней кольцеобразной платформе 4 расположены в разных вертикальных плоскостях, проходящих через ось в-в вращения платформ 3, 4, а расстояние от крепежей 18, 19 лопастей 5 к верхней кольцеобразной платформе 3 до оси в-в меньше расстояния от крепежей 18, 19 лопастей 5 к нижней кольцеобразной платформе 4 до указанной оси в-в.
Подшипниковые опоры 6, 12 могут быть выполнены в виде подшипников скольжения.
Сравнение заявленного технического решения с уровнем техники, известным из научно-технической и патентной документации на дату приоритета, не выявило средство, которому присущи признаки, идентичные всем признакам, содержащимся в заявленной формуле изобретения, т.е., совокупность существенных признаков заявленного решения ранее не была известна и не тождественна каким-либо известным техническим решениям, следовательно, оно соответствует условию патентоспособности "новизна".
Анализ известных технических решений в данной области техники показал, что предложенное техническое решение не следует для специалиста явным образом из уровня техники, поскольку не выявлены решения, имеющие признаки, совпадающие с его отличительными признаками. Т.е. заявленное решение имеет признаки, которые отсутствуют в известных технических решениях, а использование этих признаков в заявленной совокупности существенных признаков дает возможность получить новый технический результат , заключающийся в улучшении эксплуатационных характеристик вертолета. Следовательно, предложенное техническое решение получено путем творческого подхода и неочевидно для среднего специалиста в этой области, т.е. имеет изобретательский уровень по сравнению с существующим уровнем техники.
Данное техническое решение промышленно применимо, поскольку в описании к заявке и названии изобретения указано его назначение, оно может быть изготовлено промышленным способом, работоспособно, осуществимо и воспроизводимо, следовательно, оно соответствует условию патентоспособности "промышленная применимость".
Работает устройство для управления лопастями вертолета следующим образом.
При вращении в горизонтальной плоскости от силовой установки вертолета, приводная нижняя кольцеобразная платформа 4 и сопряженная с ней верхняя кольцеобразная платформа 3 с закрепленными на них лопастями создают тягу, направленную вверх, выполняя роль подъёмной силы. Когда тяга будет больше веса вертолета, вертолет без разбега оторвется от земли и начнет вертикальный набор высоты.
Поворот лопастей 5 в полете происходит за счет их установки на шарнирных крепежах 18,19 при вертикальном перемещении верхней кольцеобразной платформы 3 посредством пары гайка 16 - винт 15 рулевого привода, управляемого из кабины пилота, на величину равную β1-β2. При этом винт 15 вращается в подшипниковой опоре 6 основания 1, опуская или поднимая гайку 16 вместе с верхней кольцеобразной платформой 3, которая вращается в центральной подшипниковой опоре 12 вместе с нижней кольцеобразной платформой 4.
Использование заявленного технического решения позволит улучшить эксплуатационные характеристики вертолета, повысив тем самым срок его службы и снизить аварийность за счет конструктивной особенности в расположении лопастей, которые разнесены от оси в-в вращения платформ 3,4, встречая воздушный поток по окружности в области полезной подъемной силы, которая смещена на середину длины лопасти и до ее края, где связка сил - центробежных, инерции, лобового сопротивления воздушного потока, кардинально меняют свои характеристики. Предложенная конструкция позволит разгрузить машину от увеличенных центробежных нагрузок при отсутствии центральной несущей оси, появляется возможность увеличения крыла-лопасти в своей площади, лопасти выполняют работу подъемной силы с меньшим числом оборотов от силовой установки вертолета, явление тангажа будет иметь меньшее значение и машина в полете будет легче управляема.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вертолет с парашютной системой безопасности | 2024 |
|
RU2826652C1 |
| ВЕРТОЛЕТ | 2018 |
|
RU2701076C1 |
| ОДНОВИНТОВОЙ ВЕРТОЛЕТ | 2015 |
|
RU2588277C1 |
| БЕСПИЛОТНЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ, ДЕСАНТИРУЕМЫЙ С САМОЛЕТА-НОСИТЕЛЯ | 2016 |
|
RU2627975C2 |
| СКОРОСТНОЙ ТУРБОВЕНТИЛЯТОРНЫЙ ВИНТОКРЫЛ | 2016 |
|
RU2629475C1 |
| ПАЛУБНЫЙ ВЕРТОЛЕТ-САМОЛЕТ-АМФИБИЯ | 2017 |
|
RU2658739C1 |
| БОЕВОЙ УДАРНЫЙ ВЕРТОЛЕТ И СИЛОВАЯ УСТАНОВКА ВЕРТОЛЕТА | 2019 |
|
RU2705545C1 |
| СТАНОК ДЛЯ ОБРАБОТКИ КИРПИЧА | 2001 |
|
RU2193967C1 |
| СКОРОСТНОЙ КОМБИНИРОВАННЫЙ ВИНТОКРЫЛ | 2016 |
|
RU2610326C1 |
| ЛЕТАЮЩИЙ ЗАВОДНОЙ ВЕРТОЛЕТ | 2014 |
|
RU2567695C1 |
Изобретение относится к области вертолетостроения, а именно к конструкции втулок воздушных винтов и механизмов управления шагом лопастей. Устройство для управления лопастями вертолета содержит привод вращения лопастей и привод поворота лопастей в вертикальной плоскости, жестко закрепленное на фюзеляже основание (1) с центральной подшипниковой опорой (6), две соосно размещенные кольцеобразные платформы - верхнюю (3) и нижнюю (4), на которых закреплены лопасти (5). На основании (1) жестко закреплены вертикальные стойки с направляющими роликами, в которых установлена с возможностью вращения нижняя кольцеобразная платформа (4). Нижняя платформа (4) выполнена в виде шестерни с внутренними зубьями, находящимися в постоянном зацеплении с шестерней, кинематически связанной с силовой установкой вертолета. Верхняя кольцеобразная платформа (3) соединена с нижней платформой с возможностью совместного синхронного вращения от силовой установки вертолета и с возможностью ограниченного вертикального перемещения относительно нижней кольцеобразной платформы (4) посредством рулевого привода. Обеспечивается снижение центробежных нагрузок, возможность увеличения площади крыла-лопасти, улучшение эксплуатационных характеристик вертолета. 8 з.п. ф-лы, 12 ил.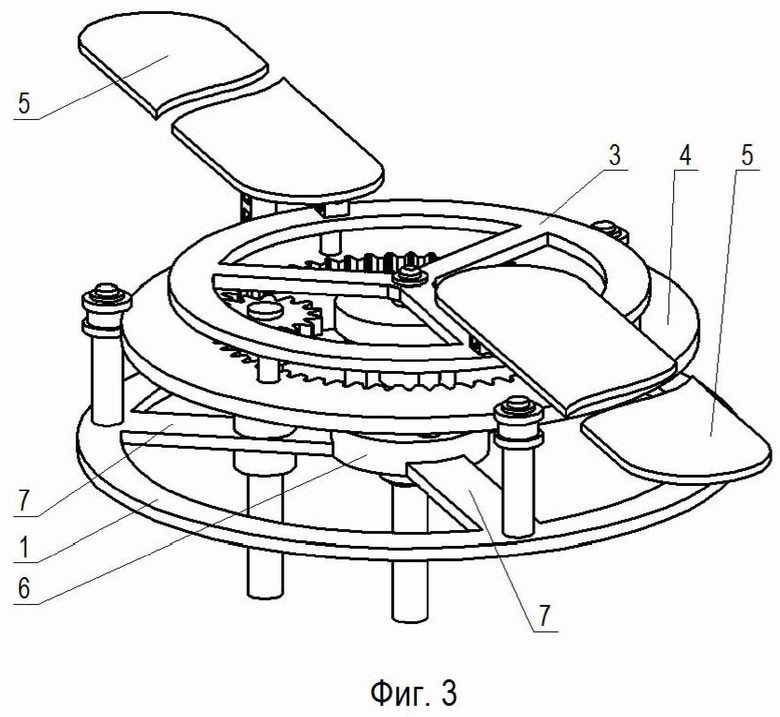
1. Устройство для управления лопастями вертолета, содержащее привод вращения лопастей и привод поворота лопастей в вертикальной плоскости, отличающееся тем, что устройство включает в себя:
- жестко закрепленное на фюзеляже основание,
- две соосно размещенные кольцеобразные платформы – верхнюю и нижнюю, на которых закреплены лопасти, и
- жестко закрепленные на основании вертикальные стойки с направляющими роликами, в которых установлена с возможностью вращения нижняя кольцеобразная платформа, выполненная в виде шестерни с внутренними зубьями, находящимися в постоянном зацеплении с шестерней, кинематически связанной с силовой установкой вертолета, при этом
- верхняя кольцеобразная платформа соединена с нижней платформой с возможностью совместного синхронного вращения от силовой установки вертолета и с возможностью ограниченного вертикального перемещения относительно нижней кольцеобразной платформы посредством рулевого привода,
- лопасти разнесены друг от друга и от оси вращения,
- каждая лопасть прикреплена к верхней и нижней платформам посредством двух шарнирно-рычажных крепежей, разнесенных друг от друга по горизонтали относительно оси вращения платформ и по вертикали, с возможностью поворота в вертикальной плоскости лопастей при перемещении верхней кольцеобразной платформы относительно нижней кольцеобразной платформы.
2. Устройство по п.1, отличающееся тем, что к нижней поверхности верхней кольцеобразной платформы жестко прикреплены вертикальные направляющие (14), размещенные с возможностью скольжения в отверстиях, выполненных в нижней кольцеобразной платформе.
3. Устройство по п.1, отличающееся тем, что основание выполнено кольцеобразным с центральной подшипниковой опорой (6).
4. Устройство по п.1, отличающееся тем, что крепежи лопастей к верхней кольцеобразной платформе и крепежи лопастей к нижней кольцеобразной платформе расположены в разных вертикальных плоскостях, проходящих через ось вращения платформ (в-в), а расстояние от крепежей лопастей к верхней кольцеобразной платформе до оси вращения платформ меньше расстояния от крепежей лопастей к нижней кольцеобразной платформе до указанной оси вращения.
5. Устройство по п.1, отличающееся тем, что основание и верхняя и нижняя кольцеобразные платформы расположены в параллельных плоскостях.
6. Устройство по п.1 или 3, отличающееся тем, что верхняя платформа выполнена с центральной подшипниковой опорой (12), расположенной соосно с центральной подшипниковой опорой (6) основания.
7. Устройство по п.1, отличающееся тем, что рулевой привод включает в себя управляемый из кабины пилота проходящий через центральную подшипниковую опору основания винт, находящийся в постоянном зацеплении с ответной внутренней резьбой гайки со стабилизирующими стержнями (17), которые установлены в отверстиях, выполненных в основании, при этом гайка сопряжена с центральной подшипниковой опорой верхней платформы.
8. Устройство по п.1, отличающееся тем, что лопасти разнесены друг от друга и от оси вращения на расстояние, соразмерное с 1/3 длины одной лопасти.
9. Устройство по п.3 или 6, отличающееся тем, что центральные подшипниковые опоры (6) и (12) выполнены в виде подшипников скольжения.
| ВЕРТОЛЕТ | 1999 |
|
RU2161580C2 |
| УПРОЩЕННАЯ СИСТЕМА РЕГУЛИРОВАНИЯ ШАГА ЛОПАСТИ ВОЗДУШНОГО ВИНТА В АВИАЦИОННОМ ГАЗОТУРБИННОМ ДВИГАТЕЛЕ | 2009 |
|
RU2490167C2 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ ШЛИФОВАНИЯ ПОЛОТНИЩ ПИЛ | 1927 |
|
SU18108A1 |
| Пропеллер с наружным обедом и поворотными лопастями | 1924 |
|
SU2490A1 |
| CN 206068136 U, 05.04.2017 | |||
| CA 2974257 A1, 09.07.2018. | |||
