Предлагаемое изобретение относится к грузовым технологическим транспортным системам, а именно к грузовым монорельсовым системам с тягово-левитационными устройствами. Оно может быть использовано для решения широкого круга логистических задач, требующих высоких скоростей движения.
Известна [1] транспортная система [патент РФ №2123946, МПК B60L 13/10, опубл. 27.12.1998 г.] содержащая транспортное средство с магнитом, путепровод с запитанной током обмоткой в виде наклонной спирали и ограничитель перемещений транспортного средства. Технический результат заключается в возможности перемещения транспортного средства вдоль пути только за счет его магнитного взаимодействия с обмоткой путепровода, т.е. без использования специального линейного двигателя, а также в уменьшении отклонения транспортного средства от заданного направления движения и предотвращения перевертывания. Недостатками [1] являются невозможность снижения величины технического коэффициента тары транспортного средства из-за установки магнитов на транспортном средстве и требование увеличенного зазора из-за наклона катушек.
Известен [2] ограничитель перемещений транспортного средства [патент РФ №2199451, МПК В60 13/00, опубл. 27.02.2003 г.], содержащий запитанные током статорные обмотки в виде винтовых спиралей, витки которых расположены параллельно направлению движения транспортного средства, и источники магнитного поля, установленные на транспортном средстве таким образом, что при взаимодействии с ними статорных обмоток обеспечивается непрерывная последовательность поясов стабилизации положения транспортного средства при движении. Технический результат получаемый от использования предлагаемого изобретения заключается в обеспечении условий поперечной стабилизации положения транспортного средства с установленными на нем источниками магнитного поля при помощи эффекта "магнитной потенциальной ямы" как функции расстояния между электропроводящими витками ограничителя перемещений и магнитными источниками транспортного средства. 2 ил. Недостатком [2] является существенное увеличение массы тары при введении постоянных магнитов в систему позиционирования транспортного средства.
Наиболее близким по существу заявляемого изобретения прототипом является [3] базовый элемент транспортной системы [патент РФ №2247040, МПК B60L 13/10, опубл. 27.02.2005 г.] содержащий путепровод с электромагнитом, обмотка которого размещена вдоль путепровода. Витки обмотки расположены в плоскостях, наклоненных относительно направления движения транспортного средства. Имеются ограничитель перемещения транспортного средства и транспортное средство с установленными на нем источниками магнитного поля. Обмотка электромагнита разделена на секции, образующие последовательность поясов ускорения транспортного средства по мере его перемещения относительно путепровода. Недостатком прототипа [3] является возможность движения транспортного средства только в одном направлении, определяемом наклоном витков обмотки.
Целью предполагаемого изобретения является создание скоростных грузопроводных монорельсовых транспортных систем с унитарным тягово-левитационным линейным электроприводом для использования в качестве эффективного технологического транспортного средства, способствующего решению логистических задач с высокими скоростями движения и защищенностью перевозимых грузов от внешних воздействий различного вида.
Достижение цели осуществляется тем, что грузопроводная транспортная система содержит трассу, выполненную в виде соединенных цилиндрических трубчатых секций с установленными в них активными элементами унитарных тягово-левитационных линейных электроприводов (УТЛЭП). Активные элементы УТЛЭП, выполненные виде четырехблочных эллипсообразных сборок линейных двигателей, расположены на внутренней поверхности цилиндрических трубчатых секций трассы под острым углом к продольной оси и взаимодействуют с цилиндрическими корпусами автономных транспортных модулей, выполненными двухслойными из стали и алюминия, осуществляя левитацию, позиционирование и перемещение транспортных модулей по трассе с высокой скоростью. Для позиционирования транспортных модулей относительно продольной оси трассы в алюминиевом слое покрытия транспортного модуля имеются три продольные зоны электродинамического позиционирования (две верхних и одна нижняя). Их взаимодействие с концевыми линейными асинхронными двигателями УТЛЭП автоматически создает силы и моменты стабилизации.
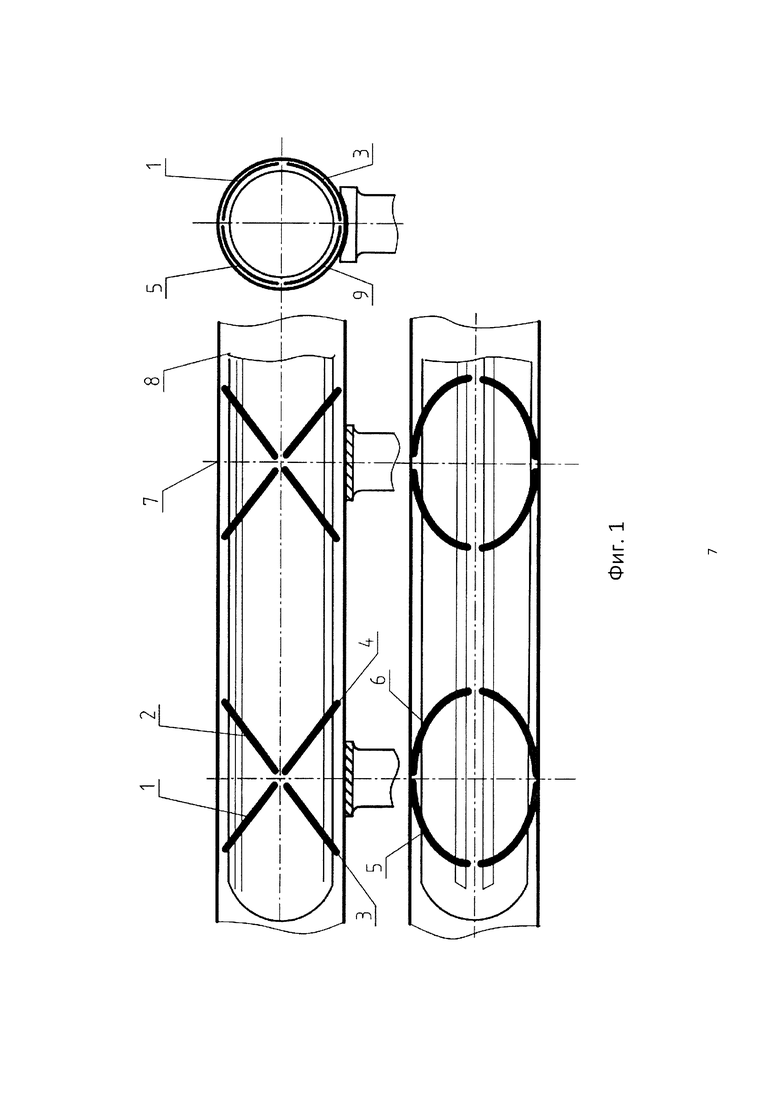
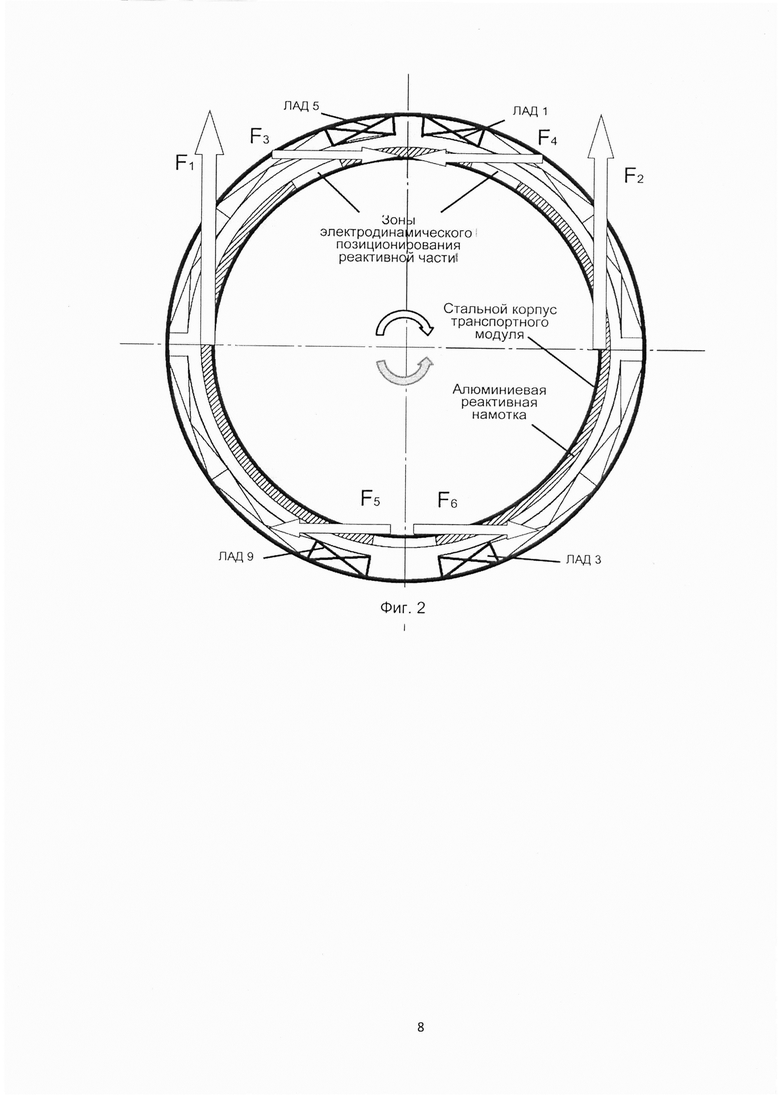
Сущность заявляемого изобретения поясняется чертежами, на которых показан пример выполнения грузопроводной транспортной системы с УТЛЭП. На Фиг. 1 представлена трасса с УТЛЭП и автономный транспортный модуль. На Фиг. 2 показано поперечное сечение трассы со схемой формирования и взаимодействия сил УТЛЭП.
На фигурах обозначены: 1 - верхний правый блок привода (левый вектор тяги), 2 - верхний правый блок привода (правый вектор тяги), 3 - нижний правый блок привода (правый вектор тяги), 4 - нижний правый блок привода (левый вектор тяги), 5 - верхний левый блок привода (левый вектор тяги), 6 - верхний левый блок привода (правый вектор тяги), 7 - трасса, 8 - автономный транспортный модуль, 9 - нижний левый блок привода (правый вектор тяги), F1 - левитационная сила левого борта, F2 - левитационная сила правого борта, F3, F4, F5, F6 - позиционирующие силы, ЛАД 1, ЛАД 3, ЛАД 5, ЛАД 9 - индукторы с вектором силы, перпендикулярным продольной оси транспортного модуля.
Система работает следующим образом. По трассе 7, выполненной в виде соединенных цилиндрических трубчатых секций, лежащих на путевых опорах, с установленными в них активными элементами УТЛЭП, представляющими собой две четырехсекционные эллиптические сборки индукторов, общая малая ось эллипсов которых лежит в горизонтальной плоскости перпендикулярно продольной оси, а большие - в вертикальной плоскости, образуя острый угол с продольной осью трассы. При подаче трехфазного питания в фазы обмотки индукторов УТЛЭП формируется бегущая волна магнитного поля, создавая силовое взаимодействие с биметаллическим корпусом (сталь, алюминий) автономного транспортного модуля. Направление бегущей волны на всех режимах работы УТЛЭП - «снизу-вверх». Стартовый режим - «левитация» - осуществляется включением в работу всех восьми ЛАД, образующих сборку УТЛЭП. При этом силы тяги, направленные вдоль ЛАД, можно рассматривать как сумму сил, направленных вдоль оси трассы (тяговая) и перпендикулярно оси трассы (левитационная). При одновременной работе всех ЛАД суммарная сила тяги будет равна нулю, а левитационная - сумме всех восьми вертикальных составляющих сил ЛАД. Движение транспортного модуля осуществляется путем нарушения баланса тяговых сил в одну либо другую сторону при сохранении постоянной суммы левитационных сил. Позиционирование транспортного модуля относительно вертикальной оси трассы и ограничение угла поворота относительно продольной оси выполняют ЛАД 5 и ЛАД 1, формирующие стабилизирующие силы F3 и F4, взаимодействующие с верхней зоной электродинамического позиционирования реактивной части транспортного модуля, а также ЛАД 9 и ЛАД 3, взаимодействующие с нижней зоной электродинамического позиционирования реактивной части транспортного модуля и формирующие стабилизирующие силы F5 и F6. Боковое смещение или поворот транспортного модуля относительно продольной оси приводит к изменению площади взаимодействия ЛАД и зонами электродинамического позиционирования реактивной части, вызывая изменение величин сил взаимодействия F3, F4, F5, F6 и возвращая систему в положение их баланса.
Грузопроводные транспортные системы с УТЛЭП обладают рядом существенных преимуществ перед другими видами транспорта. К этим преимуществам можно отнести следующее: отсутствие механического взаимодействия между трассой и транспортным модулем позволяет развивать скорости, ограниченные только силами аэродинамического сопротивления. Трасса не требует строительства бетонного или грунтового полотна, собирается в цилиндрических трубчатых секциях в надземном, эстакадном, подвесном, подземном, подводном, закрытом и герметически закрытом исполнении. При этом надземная прокладка трассы может быть выполнена при помощи стандартных опор трубопроводных систем, балочных систем, специальных эстакад и мостов, висячей на канатах, вантах, цепях и т.д., а подземная - с применением в т.ч. технологии бесканальной прокладки. Грузопроводная транспортная система с УТЛЭП в большинстве случаев обеспечивает непрерывную, надежную и безопасную эксплуатацию при самых неблагоприятных погодных условиях в любых климатических зонах.
Других известных технических решений с подобной совокупностью существенных признаков при проведении поиска по научно-технической литературе и патентной документации заявителями не обнаружено. Трасса грузопроводной транспортой системы с УТЛЭП может быть изготовлена на оборудовании и собрана с использованием стандартных стальных труб и технологий монтажа газопроводов. Поэтому она соответствует критерию «промышленная применимость».
ИСПОЛЬЗОВАННЫЕ ИСТОЧНИКИ
1. Патент РФ RU №2123946, МПК B60L 13/10, опубл. 27.12.1998 года. Транспортная система, содержащая транспортное средство с магнитом, путепровод с запитанной током обмоткой в виде наклонной спирали и ограничитель перемещений транспортного средства.
2. Патент РФ RU №2199451, МПК B60L 13/00, опубл. 27.02.2003 года. Ограничитель перемещений транспортного средства, содержащий запитанные током статорные обмотки в виде винтовых спиралей, витки которых расположены параллельно направлению движения транспортного средства, и источники магнитного поля, установленные на транспортном средстве таким образом, что при взаимодействии с ними статорных обмоток обеспечивается непрерывная последовательность поясов стабилизации положения транспортного средства при движении.
3. Патент РФ RU №2247040, МПК B60L 13/10, опубл. 27.02.2005 года. Базовый элемент транспортной системы, содержащий путепровод с электромагнитом, обмотка которого размещена вдоль путепровода. Витки обмотки расположены в плоскостях, наклоненных относительно направления движения транспортного средства. Имеются ограничитель перемещения транспортного средства и транспортное средство с установленными на нем источниками магнитного поля. Обмотка электромагнита разделена на секции, образующие последовательность поясов ускорения транспортного средства по мере его перемещения относительно путепровода.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая грузопроводная транспортная система с автономными транспортными модулями с тяговым линейным электроприводом | 2017 |
|
RU2678917C2 |
| Монорельсовая транспортная система | 2023 |
|
RU2826677C1 |
| Транспортная система | 2016 |
|
RU2643900C1 |
| МАГНИТНЫЙ ПОДВЕС ТРАНСПОРТНОГО СРЕДСТВА ДЛЯ КОМБИНИРОВАННОГО ПУТЕПРОВОДА | 2014 |
|
RU2573135C1 |
| СПОСОБ ПЕРЕМЕЩЕНИЯ ТРАНСПОРТНОГО ОБЪЕКТА И ТРАНСПОРТНЫЙ ОБЪЕКТ | 2003 |
|
RU2239571C1 |
| ГРУЗОВАЯ МАГНИТОЛЕВИТАЦИОННАЯ ТРАНСПОРТНАЯ СИСТЕМА | 2018 |
|
RU2755552C2 |
| Подвижной состав монорельсовой транспортной системы | 2021 |
|
RU2762708C1 |
| РЕГУЛИРУЕМЫЙ МАГНИТНЫЙ ПОДВЕС ТРАНСПОРТНОГО СРЕДСТВА С КОРРЕКЦИЕЙ ПОДЪЕМНОЙ СИЛЫ | 2015 |
|
RU2611858C1 |
| КОМБИНИРОВАННЫЙ МАГНИТНЫЙ ПОДВЕС ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2573524C1 |
| Подъемно-тяговое устройство для транспортной системы на магнитной подвеске | 1990 |
|
SU1788933A3 |
Изобретение относится к транспортной системе. Грузопроводная транспортная система с унитарным тягово-левитационным линейным электроприводом содержит трассу 7 с автономными транспортными модулями 8, выполненную в виде соединенных цилиндрических трубчатых секций с установленными в них активными элементами 1, 2, 3, 4, 5, 6, 9 унитарных тягово-левитационных линейных электроприводов (УТЛЭП). Активные элементы УТЛЭП выполнены в виде четырехблочных эллипсообразных сборок линейных двигателей, расположены на внутренней поверхности цилиндрических трубчатых секций трассы под острым углом к продольной оси и взаимодействуют с цилиндрическими корпусами автономных транспортных модулей 8. Корпуса автономных транспортных модулей 8 выполнены двухслойными из стали и алюминия и осуществляют левитацию, позиционирование и перемещение транспортных модулей по трассе. Для позиционирования транспортных модулей относительно продольной оси трассы в алюминиевом слое покрытия транспортного модуля имеются три продольные зоны электродинамического позиционирования (две верхние и одна нижняя). В результате отсутствует механическое взаимодействие между трассой и транспортным модулем, что позволяет последнему развивать высокие скорости. 5 з.п. ф-лы, 2 ил.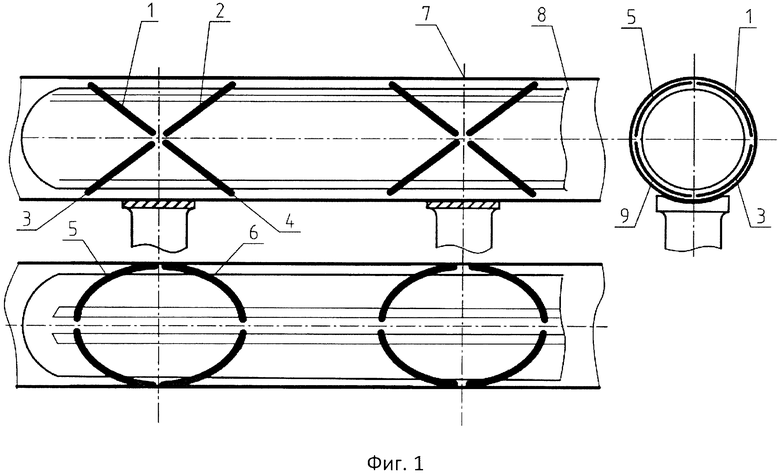
1. Грузопроводная транспортная система с унитарным тягово-левитационным линейным электроприводом, автономными транспортными модулями, содержащая трассу, выполненную в виде соединенных цилиндрических трубчатых секций с установленными в них активными элементами унитарных тягово-левитационных линейных электроприводов (УТЛЭП), выполненными в виде четырехблочных эллипсообразных сборок линейных двигателей, расположенных на внутренней поверхности цилиндрических трубчатых секций трассы под острым углом к продольной оси и взаимодействующих с цилиндрическими корпусами автономных транспортных модулей, выполненными двухслойными из стали и алюминия, осуществляющими левитацию, позиционирование и перемещение транспортных модулей по трассе с высокой скоростью и имеющими, для позиционирования транспортных модулей относительно продольной оси трассы, в алюминиевом слое покрытия транспортного модуля три продольные зоны электродинамического позиционирования (две верхние и одна нижняя), взаимодействие которых с концевыми линейными асинхронными двигателями УТЛЭП автоматически создает силы и моменты стабилизации.
2. Грузопроводная транспортная система с унитарным тягово-левитационным линейным электроприводом (УТЛЭП) по п. 1, отличающаяся тем, что индукторы УТЛЭП объединены в четырехблочные эллипсообразные сборки и расположены на внутренней поверхности цилиндрических секций трассы под острым углом к продольной оси.
3. Грузопроводная транспортная система с унитарным тягово-левитационным линейным электроприводом (УТЛЭП) по п. 1, отличающаяся тем, что величины левитационной и тяговой сил УТЛЭП формируются алгоритмом включения и совместной работы всех индукторов.
4. Грузопроводная транспортная система с унитарным тягово-левитационным линейным электроприводом (УТЛЭП) по п. 1, отличающаяся тем, что пассивным элементом УТЛЭП является биметаллический корпус транспортного модуля.
5. Грузопроводная транспортная система с унитарным тягово-левитационным линейным электроприводом (УТЛЭП) по п. 1, отличающаяся тем, что векторы сил верхних и нижних концевых линейных двигателей направлены перпендикулярно к продольной оси системы и во взаимодействии с зонами электродинамического позиционирования реактивной части осуществляют позиционирование транспортного модуля.
6. Грузопроводная транспортная система с унитарным тягово-левитационным линейным электроприводом (УТЛЭП) по п. 1, отличающаяся тем, что корпуса транспортных модулей, выполненные двухслойными из стали и алюминиевой навивки, осуществляют левитацию, позиционирование и перемещение транспортных модулей по трассе с высокой скоростью.
| БАЗОВЫЙ ЭЛЕМЕНТ ТРАНСПОРТНОЙ СИСТЕМЫ | 2003 |
|
RU2247040C1 |
| Асинхронная тягово-левитационная система для транспортного средства | 1990 |
|
SU1809581A1 |
| US 5433155 A, 18.07.1995 | |||
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| US 4138260 A, 10.04.1976. | |||

