Изобретение относится к беспилотным летательным аппаратам (БПЛА) вертолётного типа с вертикальным взлетом и посадкой, используемым для доставки грузов, аэрофотосъемки и видеонаблюдения с возможностью передачи информации на станцию управления в режиме реального времени, в том числе для автономного выполнения полетного задания по заданной программе.
Были выбраны следующие аналоги заявляемого технического решения, которые относится к БПЛА вертолётного типа.
Известна конструкция беспилотного летательного аппарата, описанная в патенте РФ на изобретение № 2666493, опубл. 07.09.2018, МПК В64С 27/08, В64С 39/02.
Известный беспилотный летательный аппарат содержит центральную платформу, на концах осей, вторые концы которых жёстко закреплены на ней и ориентированы относительно ее центра, жёстко закреплены по крайней мере восемь электродвигателей с соосными воздушными винтами с контролируемой частотой вращения. Рядом расположенные двигатели имеют встречное направление вращения, электродвигатели связаны с аккумуляторной батареей и маршрутной вычислительной системой – полетным контроллером и контроллерами моторов, мобильным пультом управления и контроля, системой видеонаблюдения и приемником GPS навигации. Кроме того, электродвигатели с винтами установлены внутри колец, аэродинамический профиль которых обращён к концевым частям винтов, которые вращаются в кольце с относительным зазором 0,45 – 1,5% от диаметра кольца.
За счёт такой конструкции обеспечивается повышение грузоподъемности БПЛА при одинаковой затраченной мощности на осуществление полета, а также увеличение продолжительности и дальности полета при одинаковой затраченной энергии.
Также известна конструкция многоцелевого беспилотного летательного аппарата вертикального взлёта и посадки, описанная в патенте РФ на полезную модель № 157424, опубл. 10.12.2015, МПК В64С 39/02, В64С 27/08.
Известный многоцелевой беспилотный летательный аппарат, содержит несущий каркас и шесть электродвигателей с воздушными винтами, связанных с аккумуляторной батареей и маршрутным вычислительным устройством, при этом на несущем каркасе в вершинах воображаемого равностороннего треугольника жестко зафиксированы три несущих системы «винт в кольце», с установленными в них двумя соосными несущими воздушными винтами противоположного вращения, с электронной регулировкой числа оборотов.
Такая конструкция позволяет максимально повысить аэродинамическую эффективность, подъемную силу, а также обеспечить высокую маневренность многоцелевого беспилотного летательного аппарата вертикального взлёта и посадки.
Также известна конструкция складного квадрокоптера, описанная в патенте РФ на изобретение № 2665123, опубл. 28.08.2018, МПК В64С 27/08.
В соответствии с описанием к патенту квадрокоптер имеет корпус квадратовидной формы, состоящий из двух параллельных пластин, между которыми втулками на осях установлены внутренние концы четырех лучей – держателей винтов с двигателями. Внешние концы лучей с винтами размещены по углам квадрата вокруг корпуса, причем крепление лучей с корпусом выполнено с возможностью их сложения для хранения и переноски. Лучи квадрокоптера в положении хранения и транспортировки сложены в горизонтальной плоскости, для чего втулки внутренних концов лучей выполнены вертикально. Лучи надеты втулками на вертикальные оси, установленные между пластинами корпуса вблизи его центра. Две пары вертикальных осей размещены на пластинах корпуса симметрично относительно продольной оси корпуса. На всех четырех углах обеих пластин корпуса установлены выступы, перед внешними концами которых установлены стопоры с резьбой.
За счёт такой конструкции обеспечивается повышение прочности скрепления лучей квадрокоптера с его корпусом при сохранении компактности квадрокоптера в нерабочем положении.
При этом все известные конструкции БПЛА квадрокоптерного типа, включая указанные выше аналоги, обладают следующими недостатками:
- избыточное энергопотребление БПЛА, необходимое для работы по меньшей мере трех электродвигателей;
- низкая устойчивость БПЛА известных конструкций к порывам ветра во время их полёта;
- невозможность запуска БПЛА различными способами в зависимости от условий их применения;
- громоздкость конструкций БПЛА, в том числе обусловленная широким расположением их несущих винтов в горизонтальной плоскости в нерабочем положении, что требует осторожного обращения с БПЛА во время их хранения и транспортировки;
- низкий коэффициент конструктивной унификации.
В качестве прототипа заявляемого изобретения выбрана конструкция беспилотного летательного аппарата вертолётного типа, описанная в заявке на изобретение РФ №2022127636 от 25.10.2022, МПК В64С 29/00.
В заявке на изобретение описана конструкция беспилотного летательного аппарата вертолётного типа, который включает в себя фюзеляж, состоящий из нескольких цилиндрических модулей, включая два электродвигателя, оснащённых складывающимися пропеллерными лопастями, вращающимися в противоположных направлениях, модуль приёмников, модуль аккумуляторной батареи, модуль автомата перекоса, изменяющий плоскость вращения лопастей пропеллера нижнего электродвигателя для изменения направления полета, и модуль блока управления полётом, при этом все модули установлены по их центральной оси на полом стержне, внутри которого расположены провода связи и электропитания, соединяющие их между собой.
Однако данная конструкция имеет следующий недостаток: применение в конструкции двух электродвигателей, оснащённых складывающимися пропеллерными лопастями в сочетании с модулем автомата перекоса, не всегда обеспечивает необходимую грузоподъёмность БПЛА, которую обычно обеспечивают традиционные конструкции БПЛА квадрокоптерного типа.
Технической проблемой, решаемой с помощью заявляемой конструкции, является невозможность обеспечения достаточно высокой грузоподъёмности БПЛА при сохранении унификации БПЛА, состоящего из нескольких съёмных модулей, предназначенных для выполнения различных задач, стоящих перед БПЛА.
Техническим результатом заявляемого изобретения является расширение области применения и повышение степени конструктивной унификации БПЛА вертолётного типа различных конструктивных исполнений, как соосных, так и квадрокоптерных.
Указанный технический результат достигается за счёт конструкции беспилотного летательного аппарата вертолётного типа с фюзеляжем, состоящим из нескольких цилиндрических модулей, включая модуль винтомоторной группы, модуль приёмников, модуль аккумуляторной батареи и модуль блока управления полётом, причем все модули установлены по их центральной оси на полом стержне, внутри которого расположены провода связи и электропитания, соединяющие модули между собой, при этом модуль винтомоторной группы содержит держатели, на которых установлены электродвигатели, оснащённые пропеллерными лопастями.
При этом, количество держателей модуля винтомоторной группы может быть различным (от трех и более) в зависимости от необходимости обеспечения требуемой грузоподъёмности БПЛА.
Дополнительно, кроме указанных модулей, фюзеляж беспилотного летательного аппарата вертолётного типа также может включать в себя и другие модули, необходимые для выполнения задач, стоящих перед БПЛА, например, модуль полезной нагрузки, предназначенный для транспортировки грузов, модуль с видеокамерой, модуль дополнительной аккумуляторной батареи для увеличения полетного времени и т.п.
В модуле приёмников в БПЛА вертолётного типа с целью обеспечения спутниковой навигации может быть использован, например, навигационный приёмник МНП-М9.1 производства Ижевского радиозавода с антенной 2J433, а в качестве приёмника управления полетом может быть использован приёмник с рабочей частотой 915 МГц, применяемый в системе радиоуправления на больших расстояниях с открытым исходным кодом по протоколу ExpressLRS.
В одном или нескольких модулях аккумуляторных батарей могут быть использованы Li-Po аккумуляторные батареи ёмкостью не менее 10 А/ч напряжением не менее 25.2 В.
Модуль блока управления полетом может быть выполнен на базе, например, контроллера «Цинк-20» производства компании ООО «Атри» или контроллера 1892ВА018 «СКИФ» производства компании «Элвис».
Сущность заявляемой конструкции БПЛА вертолётного типа поясняется изображениями.
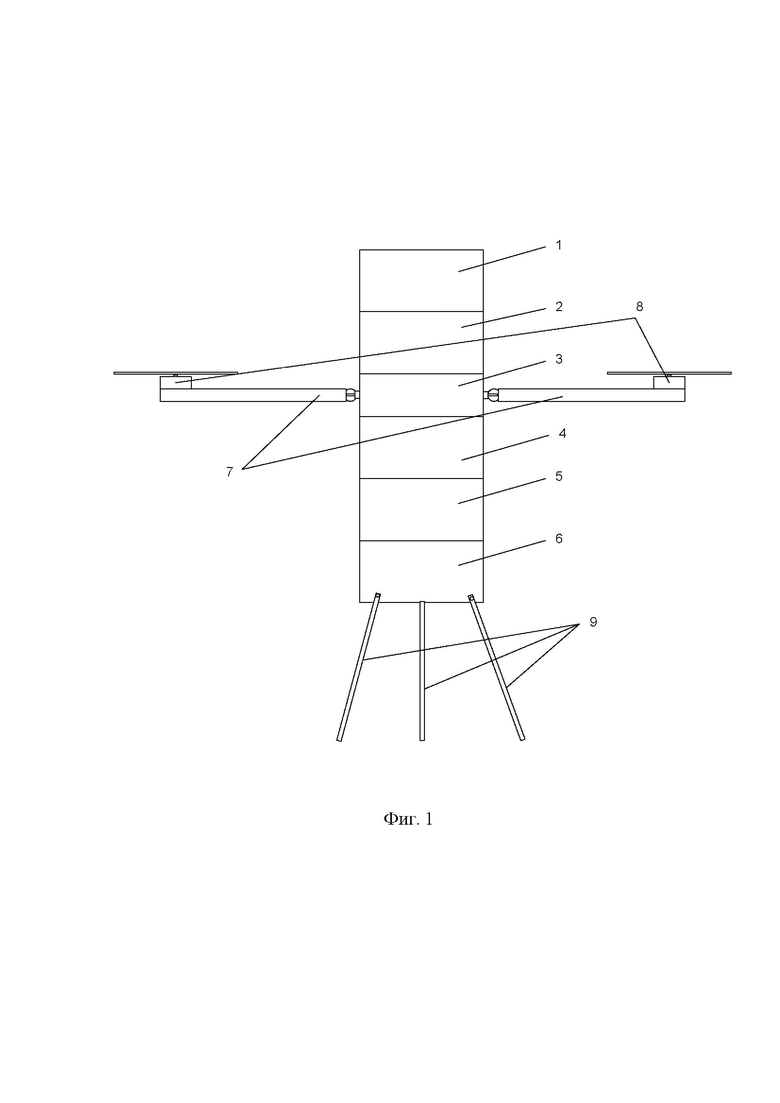
На Фиг. 1 показан один из примеров реализации БПЛА вертолётного типа «квадрокоптер», то есть выполненный с модулем винтомоторной группы, содержащим четыре держателя, на которых установлены электродвигатели, оснащённые пропеллерными лопастями.
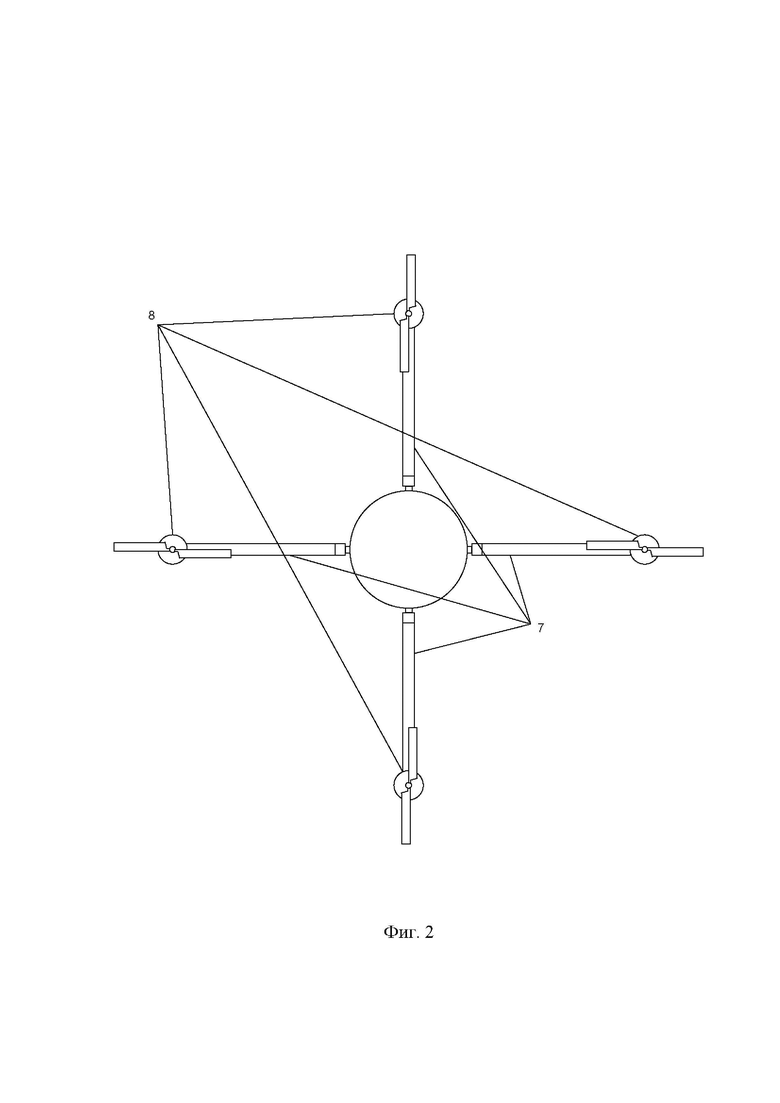
На Фиг. 2 показан вид сверху БПЛА вертолётного типа «квадрокоптер».
Конструкция БПЛА вертолётного типа включает в себя несколько функциональных модулей цилиндрической формы, последовательно соединенных между собой:
- модуль приемника (1);
- модуль первой аккумуляторной батареи (2);
- модуль винтомоторной группы типа «квадрокоптер» (3);
- модуль второй аккумуляторной батареи (4);
- модуль блока управления полетом (5);
- модуль полезной нагрузки (6).
Модуль винтомоторной группы (3) содержит четыре держателя (7), на которых установлены электродвигатели, оснащённые пропеллерными лопастями (8).
БПЛА вертолётного типа непосредственно перед его применением устанавливают на шасси, например, на треножную опору (9).
Заявляемая конструкция БПЛА вертолётного типа работает следующим образом.
Фюзеляж БПЛА непосредственно перед применением собирают в нужной конфигурации из модулей, необходимых для выполнения поставленной задачи, включая, например, следующие модули: модуль приемника (1), модуль первой аккумуляторной батареи (2), модуль винтомоторной группы (3), модуль второй аккумуляторной батареи (4), модуль блока управления полётом (5), к которым дополнительно также могут быть присоединены и другие модули, например, модуль полезной нагрузки (6), дополнительный модуль аккумуляторной батареи и т.п.
Модули хранят и транспортируют к месту применения БПЛА в разобранном виде в специальной упаковке.
Для выполнения запуска БПЛА вертолётного типа его размещают на шасси, например, на треножной опоре (9). Затем оператор БПЛА с помощью управляющих команд, которые он передаёт на приёмник управления полетом, который установлен в модуле приёмников (1) управляет движением БПЛА, отслеживая его перемещения с помощью приёмника GPS/ГЛОНАСС, а также визуально с помощью видеокамеры (в случае её установки на БПЛА).
Причем для осуществления изменения направления полёта БПЛА оператор с помощью блока управления полётом, находящимся в модуле (5) воздействует на исполнительный механизм модуля винтомоторной группы (3), создавая разность скоростей вращения лопастей пропеллеров соответствующих электродвигателей, что приводит к наклону БПЛА в горизонтальной плоскости и, соответственно, к изменению направления полета.
Работа всех модулей БПЛА обеспечивается за счёт электроэнергии, поступающей от одной или нескольких аккумуляторных батарей (2, 4), включённых в фюзеляж БПЛА.
Таким образом, за счёт заявляемой модульной конструкции БПЛА вертолётного типа, которая включает модуль винтомоторной группы, который содержит держатели, на которых установлены электродвигатели, оснащённые пропеллерными лопастями, достигается указанный технический результат – расширение области применения и повышение степени конструктивной унификации БПЛА.
| название | год | авторы | номер документа |
|---|---|---|---|
| Беспилотный летательный аппарат вертолетного типа | 2022 |
|
RU2792460C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2024 |
|
RU2838699C1 |
| СПОСОБ МОНИТОРИНГА СОСТОЯНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ ПРИ ДВИЖЕНИИ ПОЕЗДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2829561C2 |
| Устройство перехвата беспилотных летательных аппаратов | 2020 |
|
RU2738383C2 |
| Беспилотная летательная платформа вертолётного типа с пневмомеханическим устройством для тушения пожаров | 2023 |
|
RU2814718C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПРИ ДВИЖЕНИИ ПОЕЗДА МЕТРОПОЛИТЕНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ С ПРИМЕНЕНИЕМ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2022 |
|
RU2829794C2 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2024 |
|
RU2836773C1 |
| БЕСПИЛОТНЫЙ КОНВЕРТОПЛАН КРИШТОПА (БКК), СПОСОБ ФУНКЦИОНИРОВАНИЯ БКК И СПОСОБ ФУНКЦИОНИРОВАНИЯ УСТРОЙСТВА ВЕРТИКАЛЬНОГО ЗАПУСКА ПРИ ИСПОЛЬЗОВАНИИ С БКК | 2022 |
|
RU2809067C1 |
| Беспилотный летательный аппарат вертикального взлета и посадки | 2021 |
|
RU2767390C1 |
| Беспилотный летательный аппарат вертикального взлета и посадки | 2017 |
|
RU2716391C2 |
Изобретение относится к области авиации, в частности к конструкциям беспилотных летательных аппаратов (БПЛА) вертолётного типа. БПЛА вертолётного типа содержит фюзеляж, состоящий из нескольких цилиндрических модулей, включающих модуль винтомоторной группы, модуль приёмников, модуль аккумуляторной батареи и модуль блока управления полётом. Все модули установлены по их центральной оси на полом стержне, внутри которого расположены провода связи и электропитания, соединяющие модули между собой. Модуль винтомоторной группы содержит держатели, на которых установлены электродвигатели, оснащённые пропеллерными лопастями. Количество держателей модуля винтомоторной группы может быть от трех и более в зависимости от необходимости обеспечения требуемой грузоподъёмности БПЛА. Обеспечивается расширение области применения и повышение степени конструктивной унификации БПЛА вертолётного типа различных конструктивных исполнений как соосных, так и мультикоптерных. 2 ил.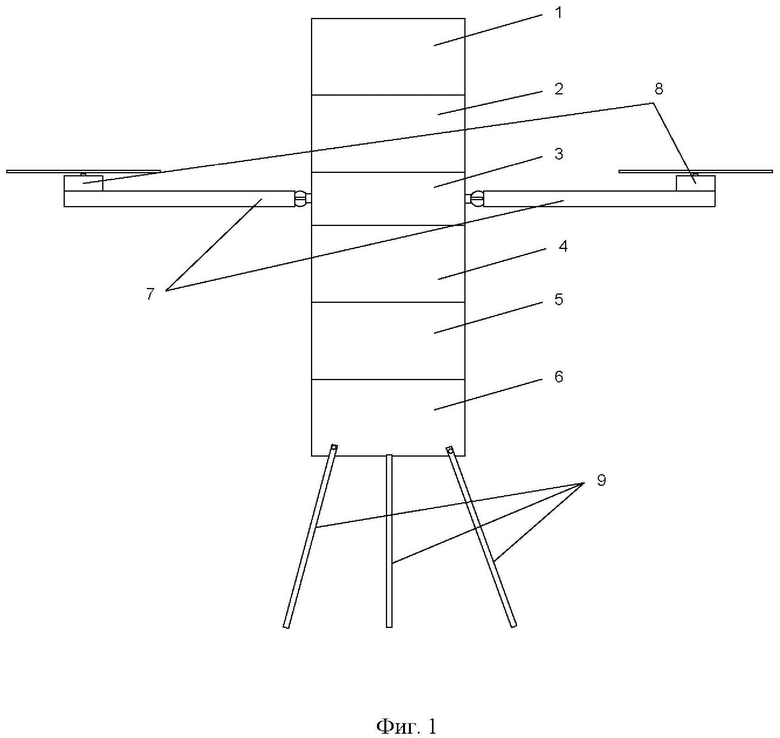
Беспилотный летательный аппарат вертолётного типа с фюзеляжем, состоящим из нескольких цилиндрических модулей, включая модуль винтомоторной группы, модуль приёмников, модуль аккумуляторной батареи и модуль блока управления полётом, причем все модули установлены по их центральной оси на полом стержне, внутри которого расположены провода связи и электропитания, соединяющие модули между собой, отличающийся тем, что модуль винтомоторной группы содержит держатели, на которых установлены электродвигатели, оснащённые пропеллерными лопастями.
| WO 2005099415 A2, 27.10.2005 | |||
| МНОГОВИНТОВОЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2009 |
|
RU2403183C2 |
| US 20170320565 A1, 09.11.2017 | |||
| US 20220219820 A1, 14.07.2022 | |||
| УСТАНОВКА ДЛЯ ИЗГОТОВЛЕНИЯ ДВУСЛОЙНЫХ ПУСТОТЕЛЫХ ИЗДЕЛИЙ ИЗ ТЕРМОПЛАСТОВ | 0 |
|
SU179906A1 |

