ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к портативному устройству для обработки пищевых продуктов, содержащему камеру обработки пищевых продуктов, включающую в себя лезвийный блок, и кожух, содержащий двигатель для приведения в действие указанного лезвийного блока и микроконтроллер для управления указанным двигателем.
УРОВЕНЬ ТЕХНИКИ
Работой устройств для обработки пищевых продуктов, таких как блендеры, соковыжималки и т.п., обычно управляют посредством физических пользовательских интерфейсов, содержащих кнопки, ручки, циферблаты и т.д., при этом пользователи знакомятся с рабочими инструкциями таких устройств для обработки пищевых продуктов, включающими операции или последовательности операций таких пользовательских интерфейсов. Хотя такие пользовательские интерфейсы являются общепризнанными, тем не менее они имеют ряд недостатков. Во-первых, такие физические пользовательские интерфейсы требуют механической интеграции в устройства для обработки пищевых продуктов, что становится все более трудным с уменьшением размеров устройств для обработки пищевых продуктов. Во-вторых, многие пользователи с трудом запоминают, как управлять такими устройствами для обработки пищевых продуктов, в частности, когда такие операции включают в себя последовательность взаимодействий с пользовательскими интерфейсами таких устройств для обработки пищевых продуктов.
Эти недостатки становятся особенно распространенными в области портативных устройств для обработки пищевых продуктов, таких как портативные блендеры и т.п. Такие портативные устройства, как правило, относительно малы, что делает механическую интеграцию физического пользовательского интерфейса более сложной и дорогостоящей. В частности, если портативное устройство для обработки пищевых продуктов обладает широкими функциональными возможностями, может потребоваться механическая интеграция нескольких циферблатов, кнопок и т.п. в промышленную конструкцию портативного устройства для обработки пищевых продуктов, что ограничивает гибкость его промышленного проектирования и увеличивает сложность его сборки и стоимость.
В US 2018/0199761 A1 раскрыт кухонный прибор для обработки пищевых продуктов, в частности кухонный прибор такого типа, который содержит корпус, вмещающий в себя электродвигатель, вал для приведения в действие обрабатывающего инструмента и встроенную ручку, причем различные обрабатывающие инструменты соединены с корпусом при помощи рычага, который содержит приспособление, такое как приспособление для измельчения, взбивания или смешивания, при этом управление работой прибора (включением, выключением, частотой вращения приспособления и т. д.) осуществляют при помощи сенсорной системы, которая может обнаруживать характерное или заданное движение, выполняемое в отношении прибора, и может интерпретировать указанное движение как рабочую инструкцию, например, включение приспособления, его выключение, установление и управление его частотой вращения и т.д.
Кухонный прибор, включающий такое обнаружение заданного движения, облегчает пользователю управление работой прибора, например, за счет устранения необходимости использования обеих рук для вызова определенных функций кухонного прибора. В качестве примера такого заданного движения пользователь может поворачивать свое запястье по часовой стрелке или против часовой стрелки, удерживая при этом кухонный прибор в вертикальном положении, в качестве команды запуска двигателя кухонного прибора.
Хотя включение такого обнаружения заданного движения в кухонный прибор или устройство для обработки пищевых продуктов может уменьшить количество требуемых элементов физического пользовательского интерфейса, оно все же имеет некоторые недостатки. Например, во время его использования пользователь может непреднамеренно совершить движение с кухонным прибором, которое будет распознано как заданное движение, что может привести к нежелательному срабатыванию (изменению) рабочей функции кухонного прибора. Кроме того, если множество функций должны запускаться таким обнаружением заданного движения, пользователь все равно должен запоминать различные движения или повторять определенное движение множество раз для обеспечения требуемого режима работы кухонного прибора, например для осуществления поэтапных изменений режима работы, таких как настройка скорости.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Задачей настоящего изобретения является создание портативного устройства для обработки пищевых продуктов с усовершенствованным управлением движением.
Согласно одному аспекту предлагается портативное устройство для обработки пищевых продуктов, содержащее камеру обработки пищевых продуктов, включающую лезвийный блок, и кожух, содержащий двигатель для приведения в действие указанного лезвийного блока и микроконтроллер для управления указанным двигателем, и по меньшей мере один датчик движения, соединенный с возможностью передачи данных с указанным микроконтроллером, причем микроконтроллер выполнен с возможностью оценки датчиковых данных, выданных по меньшей мере одним датчиком движения, для обнаружения заданного шаблона движения в указанных датчиковых данных, причем указанный заданный шаблон движения соответствует рабочей настройке двигателя; и управления указанным двигателем в соответствии с указанной рабочей настройкой при обнаружении заданного шаблона движения.
За счет использования шаблонов движений, а не одиночных движений для управления таким портативным устройством для обработки пищевых продуктов можно избежать или по меньшей мере значительно снизить риск случайной активации конкретной рабочей настройки, такой как режим работы портативного устройства для обработки пищевых продуктов. Кроме того, распознавание шаблонов движения предлагает дополнительное измерение или параметр для управления движением портативного устройства для обработки пищевых продуктов, поскольку не только конкретный тип шаблона движения может быть распознан, но, кроме того, вариации в пределах шаблона могут быть использованы в качестве механизма управления.
Например, в обеспечивающем преимущество варианте осуществления микроконтроллер выполнен с возможностью определения среднего ускорения или частоты обнаруженного заданного шаблона движения в рамках оцененных датчиковых данных, и при этом указанная рабочая настройка является функцией определенного среднего ускорения или частоты. Это обеспечивает пользователю возможность управления работой портативного устройства для обработки пищевых продуктов скорее интуитивно понятным образом, например, при масштабировании рабочей настройки портативного устройства для обработки пищевых продуктов в соответствии с обнаруженным средним ускорением или частотой обнаруженного заданного шаблона движения.
В варианте осуществления микроконтроллер выполнен с возможностью включения двигателя на заданный период времени в ответ на обнаружение заданного шаблона движения, соответствующего команде активации для указанного двигателя. Преимущество этого заключается в том, что пользователю не нужно вводить отдельную команду завершения во избежание продолжительной работы портативного устройства для обработки пищевых продуктов, а также обеспечена надлежащая длительность обработки пищевых продуктов в портативном устройстве для обработки пищевых продуктов. Кроме того, это обеспечивает механизм защиты от случайного запуска рабочей настройки портативного устройства для обработки пищевых продуктов после его использования для обработки пищевых продуктов, например, за счет движений портативного устройства для обработки пищевых продуктов во время транспортировки, например при переноске портативного устройства для обработки пищевых продуктов.
Заданный шаблон движения, соответствующий указанной команде активации, может представлять собой повторяющееся встряхивание портативного устройства для обработки пищевых продуктов, поскольку это простой и интуитивно понятный шаблон движения для запуска такого включения двигателя.
Микроконтроллер может быть выполнен с возможностью продления указанного заданного периода времени при обнаружении заданного шаблона движения, соответствующего команде продления активации. Это обеспечивает пользователю возможность продления работы двигателя при необходимости, например, чтобы убедиться, что пищевой продукт внутри портативного устройства для обработки пищевых продуктов обрабатывается в соответствии с предпочтениями пользователя. Микроконтроллер может быть выполнен с возможностью ограничения количества продлений указанного заданного периода времени при обнаружении заданного шаблона движения, соответствующего команде продления активации, например, для предотвращения истощения источника питания, такого как батарея портативного устройства для обработки пищевых продуктов, предотвращения перегрева портативного устройства для обработки пищевых продуктов и т.д.
В варианте осуществления рабочая настройка представляет собой настройку частоты вращения или направления вращения лезвийного блока указанным двигателем. В дополнительном варианте осуществления микроконтроллер может быть выполнен с возможностью оценки датчиковых данных, выданных по меньшей мере одним датчиком движения, для обнаружения изменения угла наклона портативного устройства для обработки пищевых продуктов в указанных датчиковых данных и управления двигателем для регулировки частоты вращения лезвийного блока в соответствии с обнаруженным изменением указанного угла наклона. Преимущество этого состоит в том, что пользователь может очень тонко регулировать частоту вращения лезвийного блока.
Микроконтроллер может быть дополнительно выполнен с возможностью определения направления перемещения портативного устройства для обработки пищевых продуктов на основании датчиковых данных, принятых во время работы лезвийного блока, и управления двигателем для регулировки частоты вращения лезвийного блока в соответствии с определенным направлением перемещения. Это обеспечивает особенное преимущество, так как такое направление перемещения обычно влияет на концентрацию пищевых продуктов вокруг лезвийного блока; например, при движении вверх пищевые продукты будут подталкиваться к лезвийному блоку, так что частота вращения лезвийного блока может быть увеличена для поддержания надлежащей обработки пищевых продуктов, тогда как при движении вниз пищевые продукты будут отталкиваться от лезвийного блока, так что частота вращения лезвийного блока может быть уменьшена для поддержания надлежащей обработки пищевых продуктов.
Кроме того, микроконтроллер может быть выполнен с возможностью управления двигателем для прекращения работы лезвийного блока в ответ на датчиковые данные, указывающие на конкретную ориентацию или движение портативного устройства для обработки пищевых продуктов в течение заданного промежутка времени. Это обеспечивает пользователю возможность завершения работы двигателя посредством размещения портативного устройства для обработки пищевых продуктов в определенной ориентации, например вверх дном, что может привести к отделению пищевых продуктов от лезвийного блока, и/или обеспечивает механизм защиты от отказов в случае падения портативного устройства для обработки пищевых продуктов, так что обнаружение движения падения портативного устройства для обработки пищевых продуктов вызывает прекращение работы лезвийного блока.
Портативное устройство для обработки пищевых продуктов предпочтительно дополнительно содержит батарею, выполненную с возможностью питания по меньшей мере одного датчика движения, микроконтроллера и двигателя с тем, чтобы портативное устройство для обработки пищевых продуктов можно было использовать, например, во время путешествий.
Предпочтительно по меньшей мере один датчик движения содержит по меньшей мере одно из акселерометра и гироскопа.
В конкретном варианте осуществления портативное устройство для обработки пищевых продуктов представляет собой портативный блендер, поскольку такой портативный блендер особенно подходит для такого пользовательского управления на основании распознавания шаблона движения, но принципы и идеи настоящего изобретения могут быть применены к любому подходящему типу портативного устройства для обработки пищевых продуктов.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Далее более подробно описаны варианты осуществления настоящего изобретения в качестве неограничивающих примеров со ссылкой на сопроводительные чертежи, на которых:
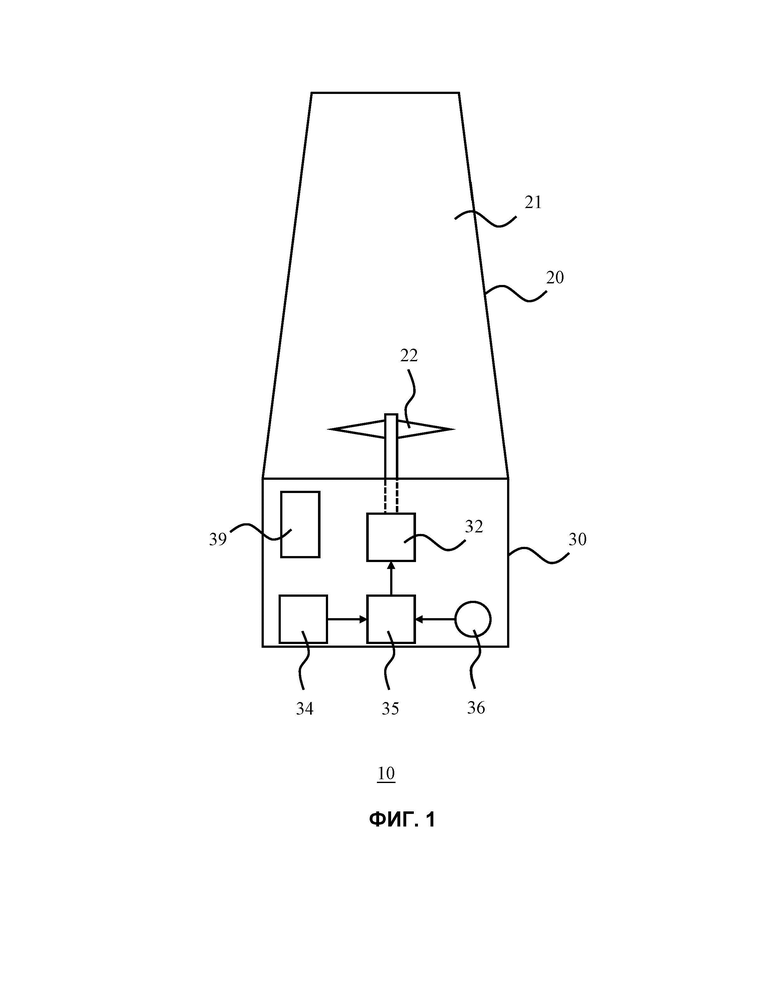
на ФИГ. 1 схематически изображен вид в разрезе портативного устройства для обработки пищевых продуктов в соответствии с вариантом осуществления;
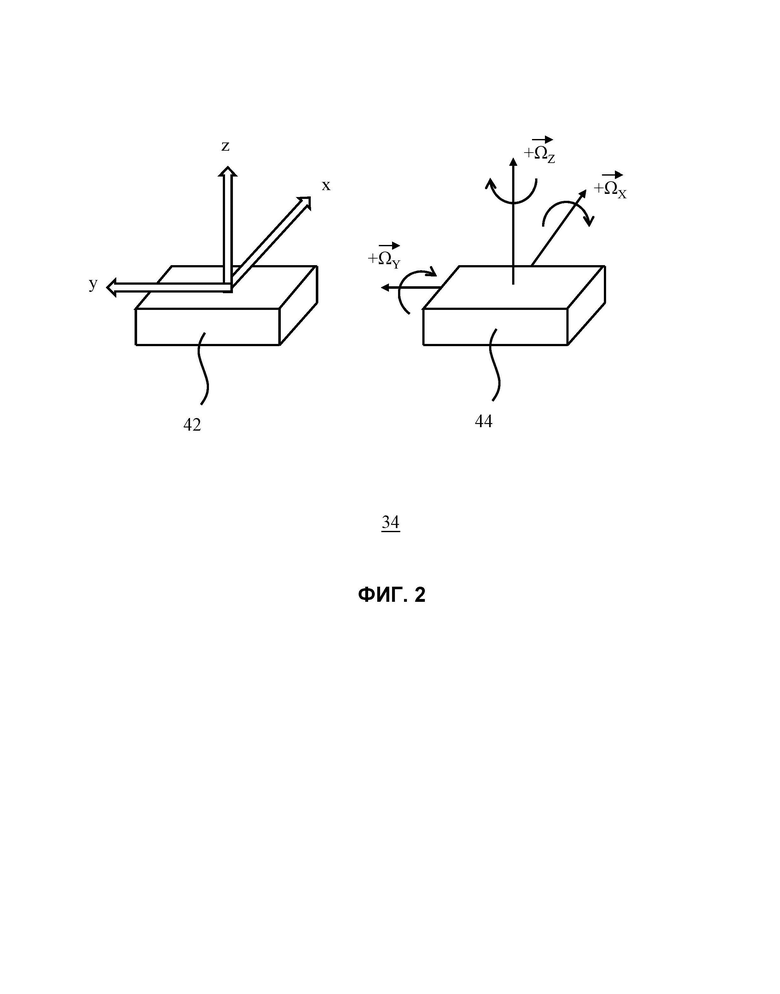
на ФИГ. 2 схематически изображен вид в перспективе аспекта такого портативного устройства для обработки пищевых продуктов;
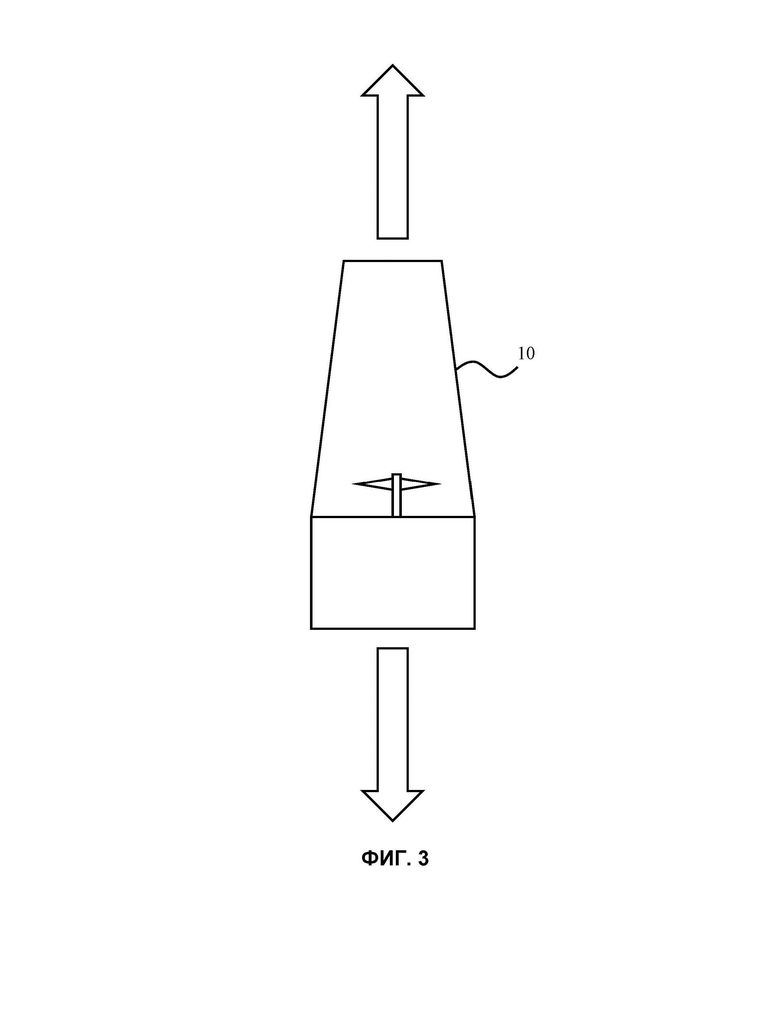
на ФИГ. 3 схематически изображен приведенный для примера шаблон движения для управления разработанным портативным устройством для обработки пищевых продуктов;
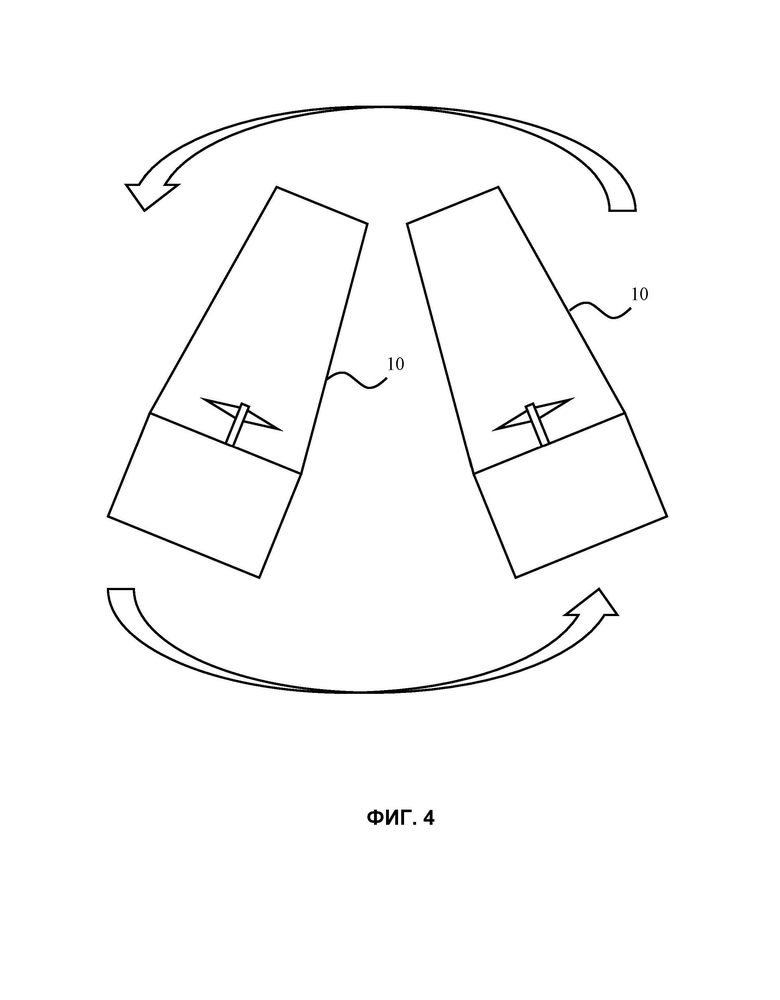
на ФИГ. 4 схематически изображен другой приведенный для примера шаблон движения для управления разработанным портативным устройством для обработки пищевых продуктов;
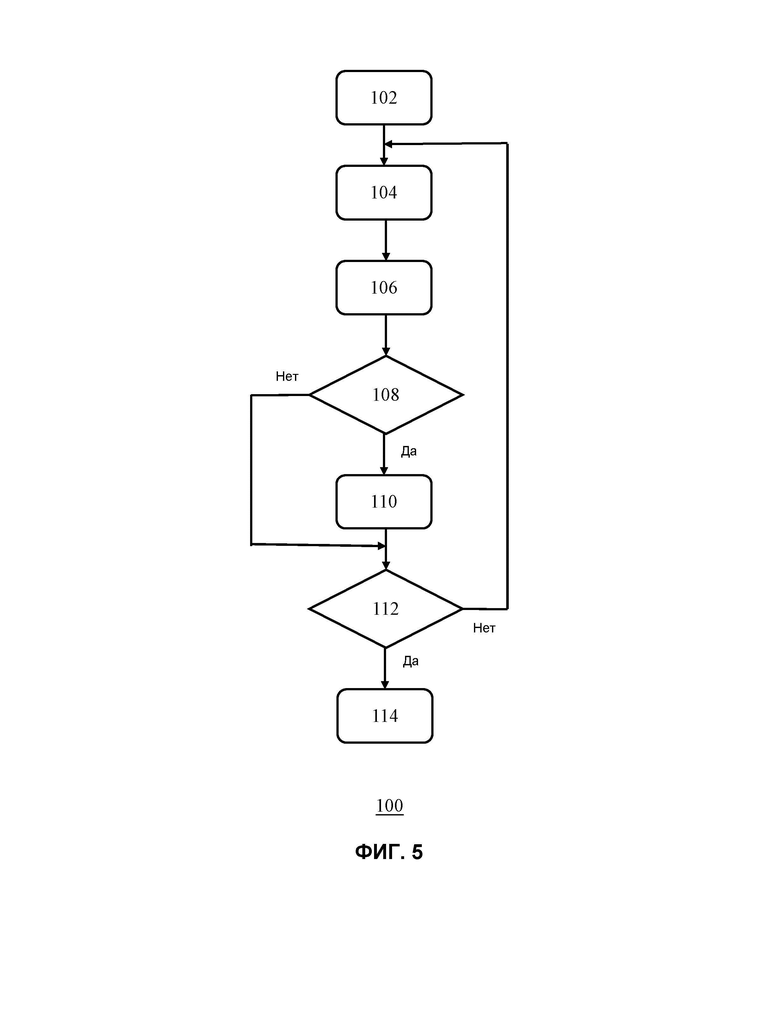
на ФИГ. 5 изображена блок-схема способа управления (портативным) устройством для обработки пищевых продуктов;
на ФИГ. 6 схематически изображено приведенное для примера движение для завершения работы разработанного портативного устройства для обработки пищевых продуктов; и
на ФИГ. 7 схематически изображено другое приведенное для примера движение для завершения работы разработанного портативного устройства для обработки пищевых продуктов.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Следует понимать, что Фигуры являются лишь схематическими и изображены без соблюдения масштаба. Кроме того, следует понимать, что одинаковые ссылочные позиции использованы на всех Фигурах для обозначения одинаковых или аналогичных деталей.
На ФИГ. 1 схематически изображен вид в разрезе портативного устройства 10 для обработки пищевых продуктов, в данном случае портативного блендера в качестве неограничивающего примера. Портативное устройство 10 для обработки пищевых продуктов содержит емкость 20, съемно установленную на кожухе 30 с использованием любого подходящего установочного механизма, такого как, например, резьбовое соединение или байонетное соединение, причем емкость 20 и кожух 30 ограничивают камеру 21 обработки пищевых продуктов портативного устройства 10 для обработки пищевых продуктов, когда емкость 20 установлена на кожухе 30. Емкость 20 и кожух 30 могут быть выполнены из любого подходящего материала или комбинации материалов. Например, емкость 20 может быть выполнена из пластика и может быть пригодна для посудомоечной машины, так что ее можно мыть в посудомоечной машине. Лезвийный блок 22, проходящий от кожуха 30, установлен внутри камеры 21 обработки пищевых продуктов. Лезвийный блок 22 может иметь любую подходящую форму, например содержать одно или более режущих лезвий, и может быть выполнен из любого подходящего материала или комбинации материалов.
Лезвийный блок 22 соединен с двигателем 32 внутри кожуха 30, например, по меньшей мере через одно из ведущей оси, коробки передач и т.п., причем двигатель 32 выполнен с возможностью приведения в действие лезвийного блока 22. Двигателем 32 управляет микроконтроллер 35 внутри кожуха 30, который может иметь любую подходящую форму. Поскольку такие микроконтроллеры по существу хорошо известны, они ради краткости дополнительно не описаны. Кожух 30 дополнительно содержит блок 34 с датчиком движения, соединенный с возможностью передачи данных с микроконтроллером 35. Блок 34 с датчиком движения может содержать по меньшей мере одно из акселерометра и гироскопа, а в некоторых вариантах осуществления может содержать и акселерометр, и гироскоп. Как объяснено более подробно ниже, микроконтроллер 35 выполнен с возможностью управления настройкой работы двигателя 32 в ответ на датчиковые данные, предоставляемые блоком 34 с датчиком движения. Портативное устройство 10 для обработки пищевых продуктов может дополнительно содержать датчик (не показан) для обнаружения правильной установки емкости 20 на кожухе 30. Микроконтроллер 35 может реагировать на этот датчик таким образом, что может активировать двигатель 32 только в том случае, если этот датчик указывает на надлежащую установку емкости 20 на кожухе 30, что, таким образом, предотвращает случайное и потенциально опасное воздействие вращающегося лезвийного блока 22 на пользователя портативного устройства 10 для обработки пищевых продуктов. Конечно, такой датчик можно не использовать, если предохранительный стопорный механизм обеспечивает надежную установку емкости 20 на кожухе 30.
Кожух 30 может дополнительно содержать пользовательский интерфейс 36, соединенный с возможностью передачи данных с микроконтроллером 35, при помощи которого может быть выбран режим работы портативного устройства 10 для обработки пищевых продуктов. Например, пользовательский интерфейс 36 может быть использован для включения или отключения управления движением рабочей настройки двигателя 32 при помощи микроконтроллера 35 в ответ на датчиковые данные, принятые от блока 34 с датчиком движения. Пользовательский интерфейс 36 может иметь любую подходящую форму или вид и может содержать по меньшей мере одно из одной или более кнопок, ручек, циферблатов и т.п. Пользовательский интерфейс 36 дополнительно может содержать сенсорное устройство вывода данных под управлением микроконтроллера 35, такое как зуммер, громкоговоритель, источник света, например светодиод и т.п., при помощи которого микроконтроллер 35 может информировать пользователя о конкретном состоянии портативного устройства 10 для обработки пищевых продуктов посредством соответствующего управления сенсорным устройством вывода данных.
Кожух 30 может дополнительно содержать источник питания постоянного тока, такой как батарея 39, выполненный с возможностью питания различных электрических компонентов портативного устройства 10 для обработки пищевых продуктов, таких как двигатель 32, микроконтроллер 35 и блок 34 с датчиком движения. Кожух 30 может содержать съемную крышку (не показана), обеспечивающую доступ к отсеку, в котором находится батарея 39, например, для обеспечения возможности замены батареи 39 и/или может иметь зарядный порт (не показан), через который можно заряжать батарею 39, например порт USB или т.п.
На ФИГ. 2 схематически изображен пример варианта осуществления блока 34 с датчиком движения. В этом приведенном для примера варианте осуществления блок 34 с датчиком движения содержит акселерометр 42 и гироскоп 44. Следует отметить, что датчик движения вместо этого может содержать только акселерометр 42 или гироскоп 44. Кроме того, могут быть предусмотрены другие типы датчиков движения и/или другие конфигурации блока 34 с датчиком движения. Акселерометр 42 выполнен с возможностью обнаружения линейного движения g(x, y, z) портативного устройства 10 для обработки пищевых продуктов, как схематически показано на ФИГ. 3, тогда как гироскоп 44 выполнен с возможностью обнаружения углового (вращательного) движения Ω(C, Y, Z) портативного устройства 10 для обработки пищевых продуктов, как схематически показано на ФИГ. 4.
Микроконтроллер 35, как правило, выполнен с возможностью оценки датчиковых данных, выданных блоком с датчиком движения, что может включать оценку величины данных линейного и/или углового ускорения, выданных акселерометром 42 и/или гироскопом 44 посредством сравнения каждого из этих значений с заданным пороговым значением, например g0 или Ω0. Пока обнаруженные значения линейного и/или углового ускорения не превышают эти пороговые значения, микроконтроллер 35 не начинает распознавание шаблонов движения. Это, например, обеспечивает предотвращение непреднамеренной активации распознавания шаблонов движения во время транспортировки портативного устройства 10 для обработки пищевых продуктов. Однако как только одно из обнаруженных значений линейного и/или углового ускорения превышает заданное пороговое значение, микроконтроллер 35 начинает оценивать датчиковые данные, предоставленные блоком 34 с датчиком движения, для обнаружения генерации датчиковых данных, соответствующих заданному шаблону движения. После распознавания такого заданного шаблона движения в оцененных датчиковых данных микроконтроллер 35 управляет двигателем 32 в соответствии с рабочей настройкой, соответствующей заданному шаблону движения.
Следует отметить, что распознавание такого шаблона движения в датчиковых данных микроконтроллером 35, как правило, требует обнаружения повторяющегося шаблона данных в датчиковых данных, поскольку такое повторение обычно вызвано повторением конкретного движения, например встряхивания и/или скручивания портативного устройства 10 для обработки пищевых продуктов. В дополнение или в качестве альтернативы оценке такого повторяющегося шаблона данных в целом характеристики повторения могут быть использованы для вызова рабочей настройки двигателя 32 при помощи микроконтроллера 35. Например, если шаблон движения представляет собой встряхивание, характер встряхивания, например медленное или быстрое встряхивание, спокойное или энергичное встряхивание, как правило, приводит к разному среднему ускорению портативного устройства 10 для обработки пищевых продуктов, измеренному при помощи блока 34 с датчиком движения, и/или к разной частоте повторений шаблонов данных, принятых при помощи блока 34 с датчиком движения, что можно выгодно использовать для точной настройки работы двигателя 32 при помощи микроконтроллера 35. Например, встряхивание может привести к тому, что микроконтроллер 35 активирует двигатель 32, тогда как интенсивность встряхивания, определяемая количественно средним ускорением портативного устройства 10 для обработки пищевых продуктов и/или частотой встряхивания, может быть использована для установки частоты вращения лезвийного блока 22 двигателем 32, т.е. легкое встряхивание портативного устройства 10 для обработки пищевых продуктов приведет к установке частоты вращения лезвийного блока 22, составляющей долю от значения его полной частоты вращения, т.е. 50%, 80% и т.д., в то время как сильное встряхивание портативного устройства 10 для обработки пищевых продуктов приведет к установке частоты вращения лезвийного блока 22 на значение полной частоты вращения. Как будет понятно специалисту в данной области техники, это, например, может быть реализовано посредством управления величиной мощности, подаваемой на двигатель 32, при помощи микроконтроллера 35. Аналогичным образом, установкой длительности работы двигателя можно управлять посредством таких шаблонов движения.
В приведенном для примерам варианте осуществления микроконтроллер 35 может сравнивать определенное среднее ускорение портативного устройства 10 для обработки пищевых продуктов и/или частоту встряхивания портативного устройства 10 для обработки пищевых продуктов с нижним и верхним пороговыми значениями. Если среднее ускорение портативного устройства 10 для обработки пищевых продуктов и/или частота встряхивания портативного устройства 10 для обработки пищевых продуктов меньше нижнего порогового значения, в принятых датчиковых данных не было распознано заданного шаблона движения. Если среднее ускорение портативного устройства 10 для обработки пищевых продуктов и/или частота встряхивания портативного устройства 10 для обработки пищевых продуктов больше верхнего порогового значения, двигатель 32 будет включен на полную мощность для обеспечения максимальной частоты вращения лезвийного блока 22. Наконец, если среднее ускорение портативного устройства 10 для обработки пищевых продуктов и/или частота встряхивания портативного устройства 10 для обработки пищевых продуктов находится между нижним пороговым значением и верхним пороговым значением, двигатель 32 будет включен на пониженной мощности для обеспечения уменьшенной частоты вращения лезвийного блока 22. Эта уменьшенная частота вращения лезвийного блока 22 может быть фиксированной частотой или может быть пропорциональна определенному среднему ускорению портативного устройства 10 для обработки пищевых продуктов и/или частоте встряхивания портативного устройства 10 для обработки пищевых продуктов. Следовательно, такой шаблон движения может быть использован для активации двигателя 32 и одновременной установки его мощности. Аналогичным образом, такая информация о шаблоне движения может быть использована для управления, например регулировки, мощностью, подаваемой на двигатель 32 после его активации, любым подходящим способом. Например, после того как двигатель 32 активирован, т.е. в течение заданного периода времени, как более подробно описано ниже, обнаружение заданного шаблона движения, в частности среднего ускорения портативного устройства 10 для обработки пищевых продуктов и/или частоты встряхивания портативного устройства 10 для обработки пищевых продуктов, может быть использовано для регулировки частоты вращения (уже вращающегося) лезвийного блока 22.
Микроконтроллер 35 дополнительно может быть выполнен с возможностью определения изменения частоты вращения лезвийного блока 22, т.е. мощности, подаваемой на двигатель 32, на основании изменения между ранее определенным средним ускорением портативного устройства 10 для обработки пищевых продуктов и/или частотой встряхивания портативного устройства 10 для обработки пищевых продуктов и последним определенным средним ускорением портативного устройства 10 для обработки пищевых продуктов и/или частотой встряхивания портативного устройства 10 для обработки пищевых продуктов. Если это изменение отрицательное, т.е. последнее определенное среднее ускорение портативного устройства 10 для обработки пищевых продуктов и/или частота встряхивания портативного устройства 10 для обработки пищевых продуктов меньше, чем ранее определенное среднее ускорение портативного устройства 10 для обработки пищевых продуктов и/или частота встряхивания портативного устройства 10 для обработки пищевых продуктов, такое отрицательное изменение, например, вызванное менее сильным встряхиванием, может быть интерпретировано микроконтроллером 35 как инструкция уменьшить частоту вращения лезвийного блока 22, тогда как положительное изменение может быть интерпретировано микроконтроллером 35 как инструкция увеличить частоту вращения лезвийного блока 22.
В альтернативном варианте осуществления частотой вращения лезвийного блока 22, т.е. величиной мощности, подаваемой на двигатель 32, можно управлять посредством обнаружения изменения ориентации портативного устройства 10 для обработки пищевых продуктов, в частности его угла наклона. Как будет понятно специалисту в данной области техники, такие изменения угла наклона могут быть обнаружены, например, при помощи акселерометра 42 или гироскопа 44. Например, если принять угол Q наклона вертикальной оси (когда Q = 0°) портативного устройства 10 для обработки пищевых продуктов относительно горизонтальной плоскости, изменения этого угла наклона могут быть использованы для регулировки частоты вращения лезвийного блока 22 соответственно. Например, увеличение угла Q наклона может привести к соответствующему уменьшению частоты вращения лезвийного блока 22. Такое изменение частоты вращения лезвийного блока 22 может быть пропорциональным величине угла Q наклона или может быть ступенчатым, например частота вращения лезвийного блока 22 может быть изменена, когда угол Q наклона принимает значение в пределах диапазона значений, соответствующих конкретной настройке частоты вращения лезвийного блока 22. В одном из вариантов частота вращения двигателя 32 может быть отрегулирована посредством микроконтроллера 35 при обнаружении микроконтроллером 35 крутящего движения в датчиковых данных от блока 34 с датчиком движения, например от гироскопа 44. Например, это может быть крутящее движение вокруг горизонтальной или вертикальной оси. В альтернативном варианте такое крутящее движение может быть использовано для изменения направления вращения двигателя 32, т.е. с направления по часовой стрелке на направление против часовой стрелки или наоборот, в случае бесщеточного двигателя 32.
На ФИГ. 5 представлена блок-схема способа 100 управления портативным устройством 10 для обработки пищевых продуктов в соответствии с вариантами осуществления настоящего изобретения. Способ 100 начинается с операции 102, на которой пользователь активирует режим выбора рабочих настроек посредством распознавания заданного шаблона движения, как описано ранее. Эта активация, например, может быть выполнена при помощи пользовательского интерфейса 36, т.е. посредством нажатия соответствующей кнопки или переключателя и т.п., или посредством обнаружения емкости 20, прикрепляемой к кожуху 30, при помощи микроконтроллера 35. Это запускает поиск микроконтроллером 35 шаблонов данных в выходном сигнале блока 34 с датчиком движения, которые вызваны заданными шаблонами движения, соответствующими заданным инструкциям управления портативного устройства 10 для обработки пищевых продуктов, т.е. инструкциям на инициирование или изменение рабочей настройки двигателя 32. В альтернативном варианте микропроцессор 35 может начать поиск таких шаблонов данных в выходном сигнале блока 34 с датчиком движения при обнаружении портативного устройства 10 для обработки пищевых продуктов, помещаемого или удерживаемого в определенной ориентации, что, таким образом, устраняет необходимость в инструкции активации с использованием пользовательского интерфейса 36.
При выполнении операции 104 микроконтроллер 35 принимает датчиковые данные от блока 34 с датчиком движения и оценивает датчиковые данные при выполнении операции 106. Следует отметить, что операции 104 и 106 могут быть выполнены по существу одновременно, т.е. методом "скользящего" окна с использованием обработки в реальном времени. Если эта оценка выявляет совпадение между шаблоном датчиковых данных в фактических датчиковых данных и заданным шаблоном датчиковых данных, соответствующим заданному шаблону движения, как указано операцией 108 проверки, например, с использованием алгоритма, в который включены определения датчиковых данных для выполнения этой оценки, микроконтроллер 35 переходит к операции 110, на которой микроконтроллер активизирует рабочую настройку двигателя 32, соответствующую этому заданному шаблону движения, перед переходом к операции 112. С другой стороны, если результат операции 108 проверки является отрицательным, т.е. принятые датчиковые данные не совпадают ни с каким шаблоном датчиковых данных, соответствующим заданному шаблону движения, т.е. как определено в вышеупомянутом алгоритме, или датчиковые данные, превышающие пороговое значение g0 и/или Ω0, не были приняты при выполнении операции 104, микроконтроллер 35 может немедленно перейти к операции 112, поскольку в принятых датчиковых данных не было распознано никакой инструкции управления.
При выполнении операции 112 микроконтроллер 35 определяет, может ли быть завершен режим работы портативного устройства 10 для обработки пищевых продуктов, в котором портативное устройство 10 для обработки пищевых продуктов может управляться с использованием шаблонов движения. В варианте осуществления при активации двигателя 32 при выполнении операции 110 двигатель 32 может быть активирован на установленный начальный период Ti времени, например период около 10-30 секунд или любой другой подходящий период времени. Микроконтроллер может проверять при выполнении операции 112, истек ли период Ti времени, и, если это так, отключить двигатель 32 портативного устройства 10 для обработки пищевых продуктов при выполнении операции 114 или, если это не так, вернуться к операции 104 для продолжения приема и оценки датчиковых данных, например для определения того, следует ли изменить рабочую настройку двигателя 32 в соответствии с распознанным движением или шаблоном движения.
В течение периода Ti пользователь может перемещать портативное устройство 10 для обработки пищевых продуктов заданным образом для продления периода Ti времени на заданную величину D, т.е. фактическая продолжительность Ta режима управления шаблоном движения портативного устройства 10 для обработки пищевых продуктов становится равной Та = Ti + Д. С этой целью микроконтроллер 35 может распознавать датчиковые данные, соответствующие этому конкретному движению или шаблону движения, для увеличения продолжительности работы двигателя при выполнении операции 108 с Ti до Ta. Микроконтроллер может дополнительно подсчитывать, сколько раз пользователь продлевал время работы двигателя 32 таким образом, и ограничивать количество раз, когда будет выполняться такая инструкция продления, например ограничивать количество таких продлений в течение одного периода работы двигателя 32, например, до десяти. Таким образом, двигатель 32, например, может быть защищен от перегрева, вызванного попытками пользователя поддерживать работу двигателя 32 в течение слишком долгого времени. Кроме того, это защищает батарею 39 от быстрого истощения, а также защищает пищевой продукт в камере 21 обработки пищевых продуктов от чрезмерной обработки.
Более того, пока начальный период Ti активации еще не истек, микроконтроллер 35 может продолжать реагировать на датчиковые данные, выданные блоком 34 с датчиком, даже если двигатель 32 по какой-то причине был отключен, до тех пор, пока емкость 20 остается установленной на кожухе 30. Например, микроконтроллер 35 может оставаться в состоянии реагирования в течение оставшейся части начального периода Ti активации или в течение фиксированного периода времени, например 10 с или другой подходящей фиксированной продолжительности. Таким образом, двигатель 32 может быть повторно включен микроконтроллером 32 при распознавании заданного шаблона движения в датчиковых данных, соответствующих рабочей настройке двигателя 32. Следует отметить, что режим управления движением портативного устройства 10 для обработки пищевых продуктов также может быть активен в течение заданного периода времени, начиная с его активации и/или приема датчиковых данных, соответствующих действительному заданному шаблону движения, и что этот режим управления движением деактивируют, когда микроконтроллер 35 не принимает (дальнейший) шаблон датчиковых данных, соответствующий заданному шаблону движения, в течение этого периода времени. Это обеспечивает отсутствие случайного включения двигателя 32 микроконтроллером 35 по истечении этого периода времени, например, при транспортировке портативного устройства 10 для обработки пищевых продуктов.
В дополнительном варианте осуществления микроконтроллер 35 во время работы двигателя 32 может быть выполнен с возможностью определения направления движения портативного устройства 10 для обработки пищевых продуктов на основании датчиковых данных, предоставляемых блоком 34 с датчиком движения, и управления соответствующим образом настройкой работы двигателя 32 после того, как двигатель 32 был активирован. Например, когда портативное устройство 10 для обработки пищевых продуктов перемещается вниз, т.е. к земле, силы, действующие на пищевой(-ые) продукт(-ты) внутри камеры 21 обработки пищевых продуктов, могут толкать пищевой продукт вверх и в направлении от лезвийного блока 20, тогда как при перемещении портативного устройства 10 для обработки пищевых продуктов вверх, т.е. от земли, силы, действующие на пищевой(-ые) продукт(-ты) внутри камеры 21 обработки пищевых продуктов, могут толкать пищевой продукт вниз и в направлении к лезвийному блоку 20.
Следовательно, при обнаружении движения портативного устройства 10 для обработки пищевых продуктов в датчиковых данных, предоставленных блоком 34 с датчиком, т.е. акселерометром 42 и/или гироскопом 44, указывающего на то, что пищевой продукт отталкивают от лезвийного блока 22, микроконтроллер 35 может соответствующим образом регулировать рабочую настройку двигателя 32, например, посредством уменьшения мощности, подаваемой на двигатель 32, и тем самым уменьшать частоту вращения лезвийного блока 22 для компенсации этого эффекта. Аналогичным образом, при обнаружении движения портативного устройства 10 для обработки пищевых продуктов в датчиковых данных, предоставленных блоком 34 с датчиком, т.е. акселерометром 42 и/или гироскопом 44, указывающего на то, что пищевой продукт подталкивают к лезвийному блоку 22, микроконтроллер 35 может соответствующим образом регулировать рабочую настройку двигателя 32, например, посредством увеличения мощности, подаваемой на двигатель 32, например восстановления полной мощности двигателя 32, и тем самым увеличивать частоту вращения лезвийного блока 22 для компенсации этого эффекта. Таким образом, частота вращения лезвийного блока 22 может быть автоматически согласована с количеством пищевого продукта вблизи лезвийного блока, что обеспечивает надлежащее управление обработкой пищевого(-ых) продукта(-тов) в целом.
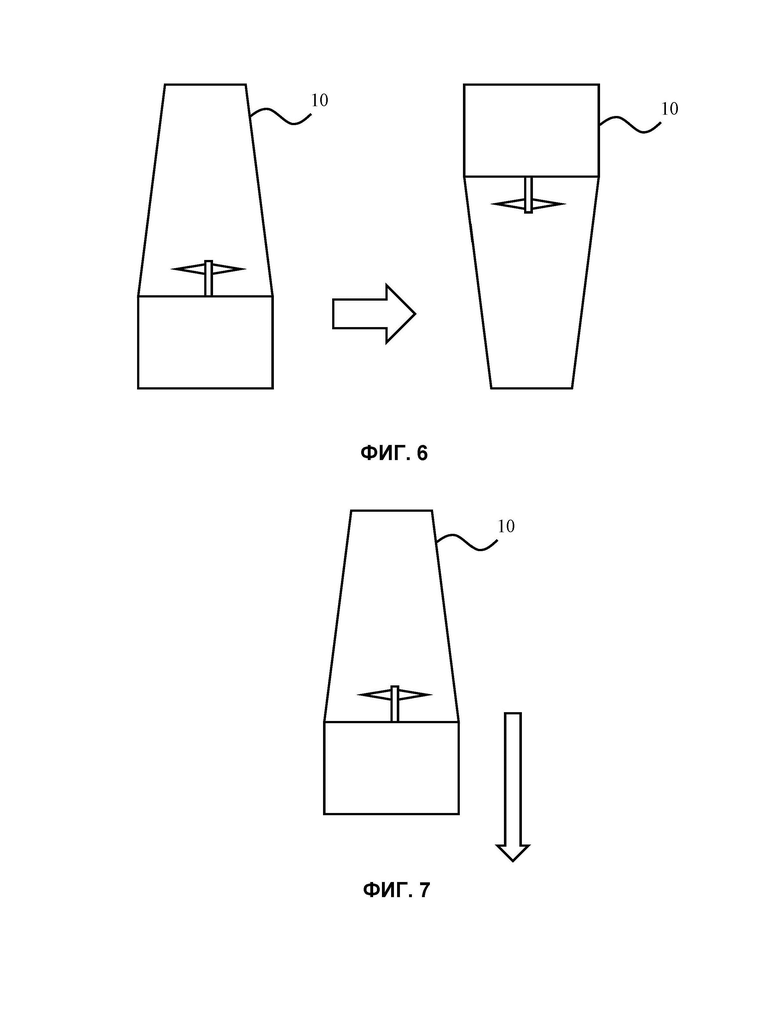
В одном варианте осуществления микропроцессор 35 портативного устройства 10 для обработки пищевых продуктов дополнительно выполнен с возможностью прекращения подачи мощности на двигатель 32, т.е. выключения двигателя 32, при выполнении определенных условий. На ФИГ. 6 схематически изображено управляемое пользователем движение портативного устройства 10 для обработки пищевых продуктов, при котором пользователь переворачивает портативное устройство 10 для обработки пищевых продуктов вверх дном для прекращения обработки пищевого продукта в камере 21 обработки пищевых продуктов посредством выключения двигателя 32. Перевернутая ориентация портативного устройства 10 для обработки пищевых продуктов может быть обнаружена микроконтроллером 35 в датчиковых данных, предоставленных блоком 34 с датчиком движения, и распознана как заданное движение для прекращения работы двигателя 32. Конечно, для этой цели может быть использовано любое различимое заданное движение. Например, микроконтроллер 35 может приостановить или прекратить работу двигателя 32 при обнаружении удержания портативного устройства 10 для обработки пищевых продуктов в наклонной ориентации, превышающей критический угол наклона.
На ФИГ. 7 схематически изображено портативное устройство 10 для обработки пищевых продуктов в свободном падении, например, из-за того, что пользователь случайно уронил портативное устройство 10 для обработки пищевых продуктов. Такое свободное падение может быть обнаружено микроконтроллером 35 в датчиковых данных, предоставленных блоком 22 с датчиком движения, например, путем установления непрерывного движения вниз, превышающего заданный порог продолжительности, после чего микроконтроллер 35 выключает двигатель 32. В таком сценарии портативное устройство 10 для обработки пищевых продуктов может быть выполнено таким образом, что двигатель 32 может быть повторно включен только с использованием пользовательского интерфейса 36 или переключателя или датчика, указывающего на то, что емкость 20 установлена на кожухе 30.
Следует отметить, что вышеописанные варианты осуществления иллюстрируют, а не ограничивают изобретение, и специалисты в данной области техники могут разработать много альтернативных вариантов осуществления в пределах объема прилагаемой формулы изобретения. В формуле изобретения никакие ссылочные позиции, заключенные в скобки, не должны рассматриваться как ограничивающие формулу изобретения. Слово "содержащий" не исключает наличия элементов или этапов, отличных от перечисленных в пункте формулы изобретения. Элемент в единственном числе не исключает наличия множества таких элементов. Изобретение может быть осуществлено посредством оборудования, содержащего несколько отдельных элементов. В пункте формулы изобретения, перечисляющем несколько устройств, некоторые из этих устройств могут быть реализованы одним и тем же элементом оборудования. Сам факт того, что определенные меры изложены в отличающихся друг от друга зависимых пунктах формулы изобретения, не означает, что сочетание этих мер не может быть использовано с выгодой.
Раскрыто портативное устройство (10) для обработки пищевых продуктов, содержащее камеру (20) обработки пищевых продуктов, включающую в себя лезвийный блок (22), и кожух (30), содержащий двигатель (32) для приведения в действие указанного лезвийного блока, микроконтроллер (35) для управления указанным двигателем и по меньшей мере один датчик (34) движения, соединенный с возможностью передачи данных с указанным микроконтроллером. Микроконтроллер выполнен с возможностью оценки датчиковых данных, выданных по меньшей мере одним датчиком движения, для обнаружения заданного шаблона движения в указанных датчиковых данных, причем указанный заданный шаблон движения соответствует рабочей настройке двигателя; и управления указанным двигателем в соответствии с указанной рабочей настройкой при обнаружении заданного шаблона движения. Задачей настоящего изобретения является создание портативного устройства для обработки пищевых продуктов с усовершенствованным управлением движением. 12 з.п. ф-лы, 7 ил.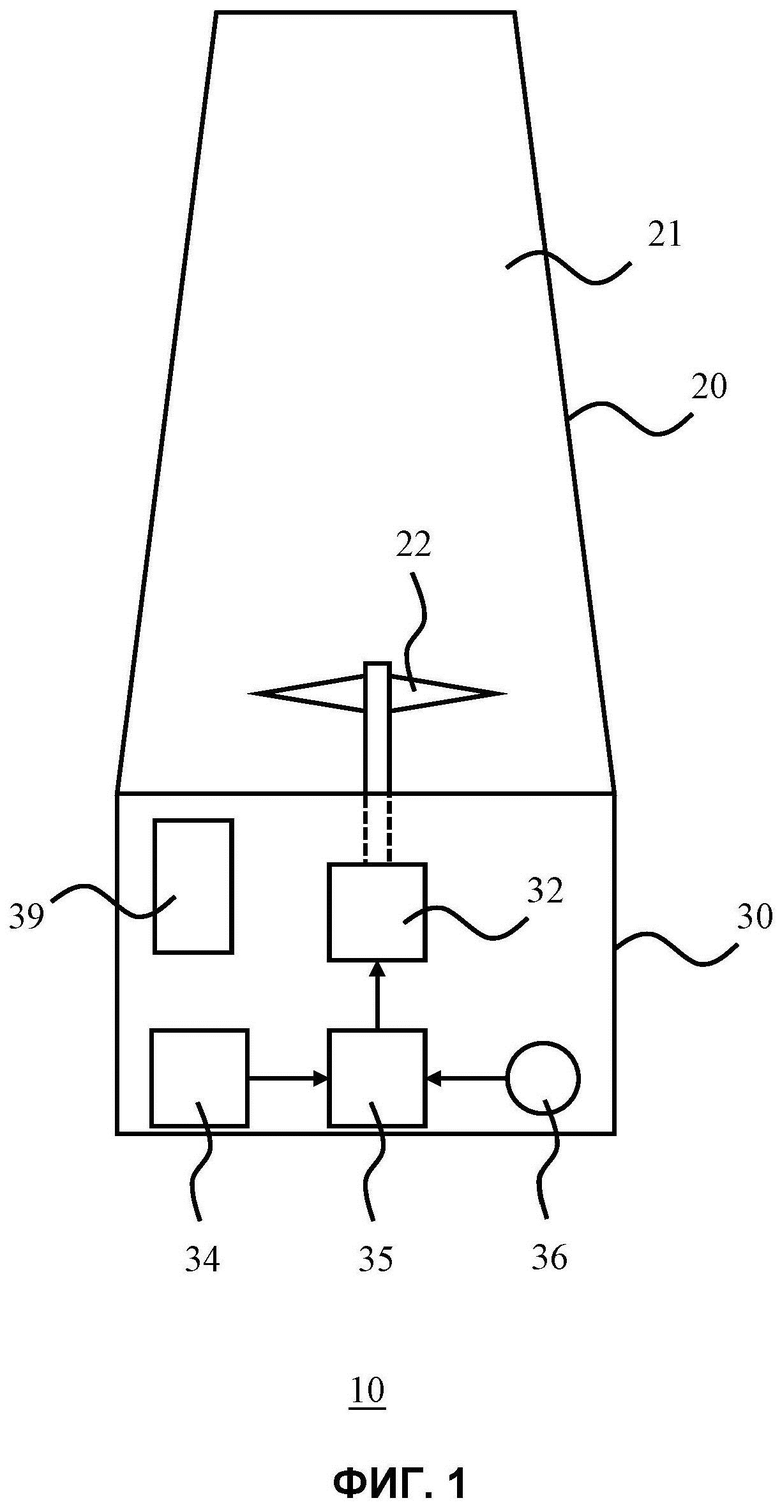
1. Портативное устройство (10) для обработки пищевых продуктов, содержащее:
камеру (20) обработки пищевых продуктов, включающую в себя лезвийный блок (22), и кожух (30), содержащий двигатель (32) для приведения в действие указанного лезвийного блока, микроконтроллер (35) для управления указанным двигателем и по меньшей мере один датчик (34) движения, соединенный с возможностью передачи данных с указанным микроконтроллером;
причем микроконтроллер выполнен с возможностью:
оценки датчиковых данных, выданных по меньшей мере одним датчиком движения, для обнаружения заданного шаблона движения в указанных датчиковых данных, причем указанный заданный шаблон движения соответствует рабочей настройке двигателя; и
управления указанным двигателем в соответствии с указанной рабочей настройкой при обнаружении заданного шаблона движения.
2. Портативное устройство (10) для обработки пищевых продуктов по п. 1, в котором микроконтроллер (35) выполнен с возможностью определения среднего ускорения или частоты обнаруженного заданного шаблона движения в рамках оцененных датчиковых данных, и указанная рабочая настройка является функцией определенного среднего ускорения или частоты.
3. Портативное устройство (10) для обработки пищевых продуктов по п. 1 или 2, в котором микроконтроллер (35) выполнен с возможностью включения двигателя (32) на заданный период времени в ответ на обнаружение заданного шаблона движения, соответствующего команде активации для указанного двигателя.
4. Портативное устройство (10) для обработки пищевых продуктов по п. 3, в котором заданный шаблон движения, соответствующий указанной команде активации, представляет собой повторяющееся встряхивание портативного устройства для обработки пищевых продуктов.
5. Портативное устройство (10) для обработки пищевых продуктов по п. 3 или 4, в котором микроконтроллер (35) выполнен с возможностью продления указанного заданного периода времени при обнаружении заданного шаблона движения, соответствующего команде продления активации.
6. Портативное устройство (10) для обработки пищевых продуктов по п. 5, в котором микроконтроллер (35) выполнен с возможностью ограничения количества продлений указанного заданного периода времени при обнаружении заданного шаблона движения, соответствующего команде продления активации.
7. Портативное устройство (10) для обработки пищевых продуктов по любому из пп. 1-6, в котором рабочая настройка представляет собой настройку частоты вращения или направления вращения лезвийного блока (22) указанным двигателем (32).
8. Портативное устройство (10) для обработки пищевых продуктов по п. 7, в котором микроконтроллер (35) выполнен с возможностью:
оценки датчиковых данных, выданных по меньшей мере одним датчиком (34) движения, для обнаружения изменения угла наклона портативного устройства для обработки пищевых продуктов в указанных датчиковых данных; и
управления двигателем (32) для регулировки частоты вращения лезвийного блока (22) в соответствии с обнаруженным изменением указанного угла наклона.
9. Портативное устройство (10) для обработки пищевых продуктов по п. 7 или 8, в котором микроконтроллер (35) выполнен с возможностью:
определения направления перемещения портативного устройства для обработки пищевых продуктов на основании датчиковых данных, принятых во время работы лезвийного блока (22); и
управления двигателем (32) для регулировки частоты вращения лезвийного блока в соответствии с определенным направлением перемещения.
10. Портативное устройство (10) для обработки пищевых продуктов по любому из пп. 1-9, в котором микроконтроллер (35) дополнительно выполнен с возможностью управления двигателем (32) для прекращения работы лезвийного блока (22) в ответ на датчиковые данные, указывающие на конкретную ориентацию или движение портативного устройства для обработки пищевых продуктов в течение заданного промежутка времени.
11. Портативное устройство (10) для обработки пищевых продуктов по любому из пп. 1-10, дополнительно содержащее батарею (39), выполненную с возможностью питания по меньшей мере одного датчика (34) движения, микроконтроллера (35) и двигателя (32).
12. Портативное устройство (10) для обработки пищевых продуктов по любому из пп. 1-11, в котором по меньшей мере один датчик (34) движения содержит по меньшей мере одно из акселерометра (42) и гироскопа (44).
13. Портативное устройство (10) для обработки пищевых продуктов по любому из пп. 1-12, причем портативное устройство для обработки пищевых продуктов представляет собой портативный блендер.
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |
| EP 3329816 A1, 06.06.2018 | |||
| УЗЕЛ КУВШИНА ДЛЯ БЛЕНДЕРА | 2013 |
|
RU2611984C2 |

