Область техники
Заявленная группа изобретений относится к способам управления тяговыми двигателями транспортных средств и может быть использована в электромобилях.
Известен метод управления энергетической системой полноприводного автомобиля, включающий следующие этапы:
- в ответ на получение блоком управления двигателем (далее - БУД) команды на включение, включение БУД с низким напряжением;
- самотестирование БУД;
- в ответ на успешное прохождение самотестирования БУД, включение БУД с высоким напряжением, в противном случае – выдача ошибки и отключение БУД;
- получение БУД команды на управление крутящим моментом электродвигателя от блока управления автомобилем (далее – БУА) и управление крутящим моментом электродвигателя на основании полученного сигнала с обратной связью от токоизмерительного датчика электродвигателя;
- получение БУД команды на управление скоростью вращения электродвигателя от БУА и управление скоростью вращения электродвигателя на основании полученного сигнала с обратной связью от датчика скорости вращения электродвигателя;
- в ответ на получение БУД команды от БУА на торможение электродвигателя, переключение электродвигателя в режим генерации электроэнергии (пат. WO 2023082854, опубл. 19.05.2023).
Известен способ управления электродвигателем, реализуемый с помощью системы обеспечения безопасности транспортного средства и включающий следующие этапы:
- выключение электродвигателя модулем обеспечения безопасности или ограничение его выходной мощности во время текущего запуска по истечении заданного промежутка времени, если не был предоставлен правильный код безопасности;
- разрешение работы силовой установки в случае получения правильного кода безопасности (пат. RU 2509668, опубл. 20.03.2014. Бюл. №8).
Наиболее близким по совокупности существенных признаков – прототипом заявляемого изобретения в части способа управления электродвигателем – является способ управления электродвигателем, включающий следующие этапы:
- в ответ на получение БУД команды на включение, включение БУД с низким напряжением;
- самотестирование БУД;
- в ответ на успешное прохождение самотестирования БУД, включение БУД с высоким напряжением, в противном случае – выдача ошибки и отключение БУД;
- получение БУД сигналов от датчика скорости вращения электродвигателя и токоизмерительного датчика электродвигателя и переключение режима работы электродвигателя между потреблением и генерацией электроэнергии на основании полученных сигналов;
- получение БУД команды на управление крутящим моментом электродвигателя от БУА и управление крутящим моментом электродвигателя на основании полученного сигнала с обратной связью от токоизмерительного датчика электродвигателя;
- получение БУД команды на управление скоростью вращения электродвигателя от БУА и управление скоростью вращения электродвигателя на основании полученного сигнала с обратной связью от датчика скорости вращения электродвигателя;
- в ответ на получение БУД команды от БУА на торможение электродвигателя, переключение электродвигателя в режим генерации электроэнергии (пат. RU 2611592, опубл. 28.02.2017. Бюл. №7).
К общим недостаткам известных решений в части способа управления электродвигателем относится их ограниченные возможности, с точки зрения обеспечения безопасности БУД и контура высокого напряжения.
Известна силовая установка автомобиля, включающая аккумуляторную батарею, обогреватель аккумуляторов, устройство управления аккумуляторами, соединенную с аккумуляторами и обогревателем аккумуляторов посредством CAN шины, электрическую распределительную коробку, электродвигатель, контроллер двигателя и разграничительный индуктор (пат. RU 2611592, опубл. 28.02.2017. Бюл. 7).
Наиболее близким по совокупности существенных признаков – прототипом заявляемого изобретения в части устройства для осуществления способа управления электродвигателем – является устройство управления электродвигателем, включающее БУА, БУД, конденсатор, токоизмерительный датчик, датчик скорости вращения, электродвигатель (пат. RU 2657868, опубл. 18.06.2018. Бюл. №17).
К общим недостаткам известных решений относится отсутствие в них устройств для подавления электромагнитных помех. Между тем известно, что источником таких помех могут быть, в частности, транзисторы.
Раскрытие изобретения
В контексте настоящей заявки в качестве синонимов будут использованы следующие понятия:
- «электродвигатель электромобиля», «тяговый электродвигатель электромобиля», «двигатель»;
- «транспортное средство», «автомобиль», «электромобиль»;
- «контроллер», «блок управления двигателем».
Под низким напряжением будет пониматься напряжение ниже или равное 36 В, например, 12 В, а под высоким напряжением понимается напряжение выше 36 В.
Под включением элемента с высоким/низким напряжением будет пониматься подключение указанного элемента к контуру высокого или низкого напряжения.
Контур высокого напряжения может отличаться от контура низкого напряжения наличием повышающего преобразователя DC-DC и/или конденсатора высокого напряжения.
Группа заявленных изобретений включает способ управления электродвигателя электромобиля и устройство для осуществления такого способа управления. Технической задачей заявленных изобретений, составляющих группу, является дополнение алгоритмов управления тяговым электродвигателем электромобиля этапами дополнительного мониторинга параметров тягового электродвигателя. Второй технической задачей заявленных изобретений группы является повышение надежности электромобиля за счет введения в его конструкцию устройств, подавляющих электромагнитные помехи.
Технический результат осуществления предлагаемой группы изобретений заключается в повышении безопасности эксплуатации электромобиля.
Решение первой поставленной технической задачи достигается за счет осуществления способа управления тяговым электродвигателем электромобиля, включающего следующие этапы:
этап 1: в ответ на получение БУД команды на включение, включение БУД с низким напряжением;
этап 2: самотестирование БУД;
этап 3: в ответ на успешное прохождение самотестирования БУД, выполняется предварительная зарядка конденсатора высокого напряжения в контуре высокого напряжения, по ее окончании - переход в состояние «ГОТОВНОСТЬ»;
этап 4: аутентификация, включающая подэтапы:
подэтап 4.1: после получения сообщения об активации зажигания, направление БУА в БУД сигнала аутентификации, БУД ожидает от БУА указанный сигнал в течение предварительного заданного интервала времени;
подэтап 4.2: сравнение в БУД полученного сигнала с эталонным сигналом, который генерируется в БУД; если результат совпадает с эталонным сигналом, направление из БУД в БУА сигнала разблокирования электродвигателя; в случае несовпадения сигналов, ожидание БУД сигнала аутентификации до истечения предварительного заданного интервала времени; в случае неполучения сигнала аутентификации, совпадающего с эталонным сигналом, направление БУД в БУА сигнала блокирования электродвигателя;
подэтап 4.3: после получения БУА сигнала разблокирования двигателя, направление из БУА в БУД сигнала (статуса) «РАЗБЛОКИРОВАН» и инициирование выполнения следующих этапов. В случае получения БУА сигнала блокирования двигателя, направление БУА в БУД сигнала (статуса) «ЗАБЛОКИРОВАН» и инициирование активного разряда контура высокого напряжения.
этап 5: в случае разблокирования электродвигателя, включение БУД с высоким напряжением, в противном случае – выдача ошибки и отключение БУД;
этап 6: получение БУД сигналов от датчика скорости вращения электродвигателя и токоизмерительного датчика электродвигателя и переключение режима работы электродвигателя между потреблением и генерацией электроэнергии на основании полученных сигналов;
этап 7: получение БУД команды на управление крутящим моментом электродвигателя от БУА и управление крутящим моментом электродвигателя на основании полученного сигнала с обратной связью от токоизмерительного датчика электродвигателя;
этап 8: получение БУД команды на управление скоростью вращения электродвигателя от БУА и управление скоростью вращения электродвигателя на основании полученного сигнала с обратной связью от датчика скорости вращения электродвигателя;
этап 9: в ответ на получение БУД команды от БУА на торможение электродвигателя, переключение электродвигателя в режим генерации электроэнергии;
этап 10: в ответ на получение БУД от БУА команды на остановку или сигнала блокирования электродвигателя, уменьшение силы тока электродвигателя до нуля и отправка с БУА на БУД команды на активный разряд;
этап 11: в ответ на получение БУД от БУА команды на активный разряд, или в ответ на потерю сигнала от коммуникационной шины CAN в течение предварительно заданного промежутка времени и получение БУД от БУА сигнала о столкновении, уменьшение напряжения в контуре высокого напряжения посредством осуществления активного межфазного короткого замыкания;
этап 12: в ответ на успешное завершение активного разряда и/или в ответ на неполучение сигнала работы сети высокого напряжения в течение предварительно заданного времени, отключение БУД.
Данные для сигнала аутентификации могут храниться в памяти БУА или генерироваться в БУА на основании даты, времени, введенных пользователем данных и/или хранящегося в памяти БУА криптографического ключа. Данные для эталонного сигнала могут храниться в памяти БУД или генерироваться в БУА на основании даты, времени и хранящегося в памяти БУД криптографического ключа.
Очередность и повторяемость этапов 6, 7, 8, 9, 10, 11, 12 определяется текущей дорожной обстановкой и/или конкретной ситуацией и не является предметом охраны по настоящей заявке. Порядок перечисления этапов 6, 7, 8, 9, 10, 11, 12 в настоящей заявке не должен служить для указания единственно возможного способа осуществления предлагаемого изобретения.
Новизной предлагаемого технического решения, в части способа, является введение в способ управления электродвигателем электромобиля трех дополнительных этапов, указанных выше под номерами «10», «11», «12», а именно:
этап 10: в ответ на получение БУД от БУА команды на остановку или сигнала блокирования электродвигателя, уменьшение силы тока электродвигателя до нуля и отправка с БУА на БУД команды на активный разряд;
этап 11: в ответ на получение БУД от БУА команды на активный разряд, или в ответ на потерю сигнала от коммуникационной шины CAN в течение предварительно заданного промежутка времени и получение БУД от БУА сигнала о столкновении, уменьшение напряжения в контуре высокого напряжения посредством осуществления активного межфазного короткого замыкания;
этап 12: в ответ на успешное завершение активного разряда и/или в ответ на неполучение сигнала работы сети высокого напряжения в течение предварительно заданного времени, отключение БУД.
Решение второй поставленной технической задачи достигается за счет введения в конструкцию электромобиля электромагнитного фильтра перед конденсатором высокого напряжения.
Новизной, в части заявленного устройства для осуществления способа управления электродвигателем электромобиля, является установка перед конденсаторами высокого напряжения электромагнитного фильтра, сглаживающего (подавляющего) электромагнитные помехи в системе.
Указанные признаки являются новыми, существенными, с точки зрения достижения заявленного технического результата, и промышленно применимыми, так как основаны на известных технологиях.
Краткое описание чертежей
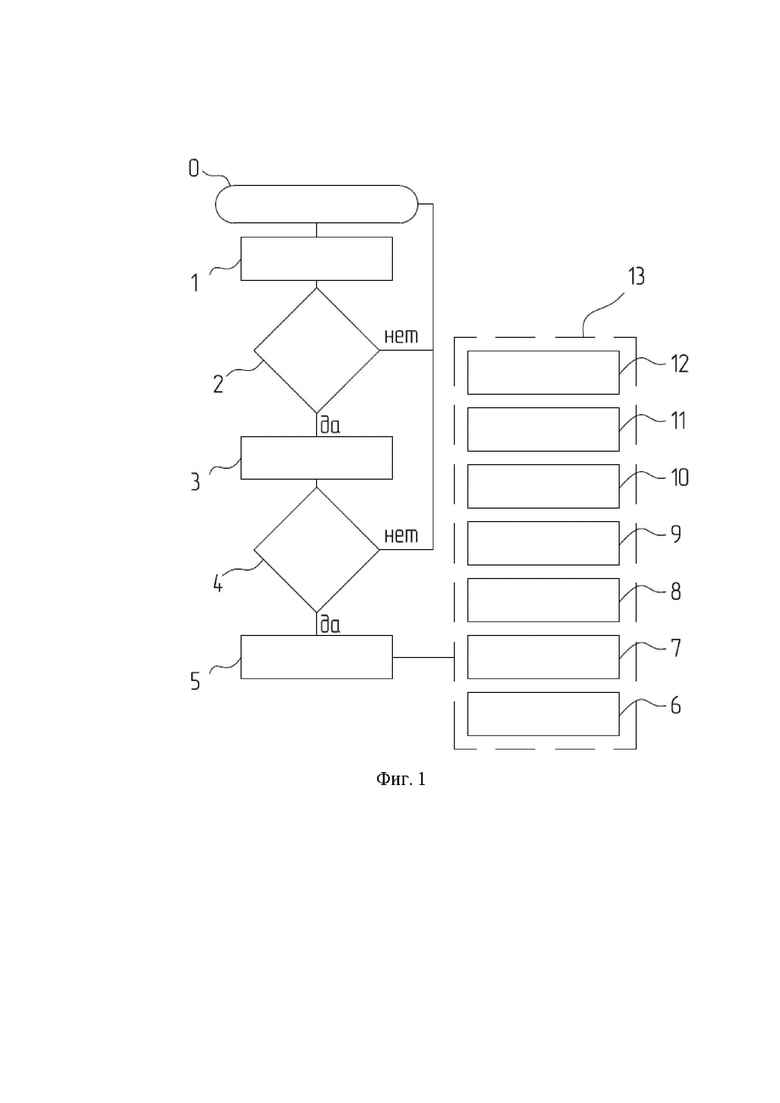
На Фиг. 1 представлена блок-схема этапов предлагаемого способа управления электродвигателем электромобиля.
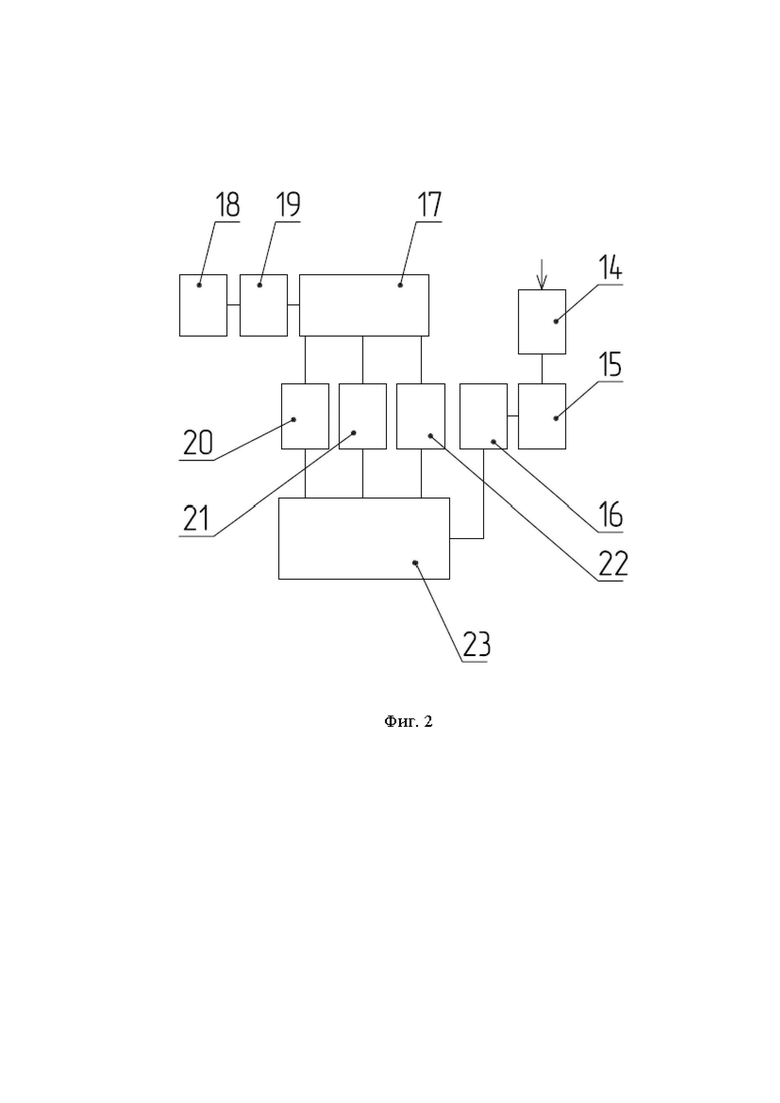
На Фиг. 2 схематично показано устройство для осуществления предлагаемого способа. Стрелкой показан ввод высокого напряжения.
Осуществления изобретения
Осуществление предлагаемого способа управления электродвигателем электромобиля иллюстрируется блок-схемой, на которой обозначены основные этапы осуществления способа. Начало осуществления показано в виде условного – нулевого – этапа (обозначен «0»).
Этапы управления электродвигателем электромобиля, применяемые в технических решениях, использованных в качестве аналогов, и обозначенные на Фиг. 1 номерами от 1 до 9, известны из уровня техники.
На этапе 1 происходит включение БУД 17 с низким напряжением (Фиг. 1, 2).
На этапе 2 БУД 17 осуществляет самотестирование (Фиг. 1, 2).
Как показано на Фиг. 2, самотестирование БУД 17 включает в себя прием сигналов пробуждения от входящих в состав БУД 17 модулей, в частности модуля памяти, и биполярных транзисторов с изолированным затвором (далее - БТИЗ) 16, сравнение сигналов с эталонными сигналами и при их совпадении – отправку сообщения о состоянии БУД 17 в БУА 18. При получении ответного сообщения, считают, что самотестирование завершено успешно и переходят к следующему этапу включения БУД 17 с высоким напряжением.
Указанный этап самотестирования позволяет обеспечить безопасность БУД 17 и системы управления работой электродвигателя 23 в целом, поскольку исключает сценарий включения неисправного БУД 17 с высоким напряжением.
На этапе 3 после завершения включения питания БУД 17 с низким напряжением и установления отсутствия ошибок БУД 17, начинают предварительную зарядку конденсатора 15 высокого напряжения в контуре высокого напряжения. При этом подача высокого напряжения к конденсатору 15 происходит через электромагнитный фильтр 14. Это позволяет подавить электромагнитные помехи и повысить, за счет этого, надежность устройства в целом. После завершения зарядки, БУД 17 переходит в состояние «ГОТОВНОСТЬ» для завершения включения питания БУД 17 с высоким напряжением.
На этапе 4 выполняется аутентификация. БУА 18 направляет в БУД 17 сигнал аутентификации, и БУД 17 ожидает от БУА 18 указанный сигнал в течение предварительного заданного интервала времени. В качестве примера, не исключающего иные настройки системы управления, БУА 18 направляет указанный сигнал через 250 мс после получения сообщения об активации зажигания, а БУД 17 ожидает указанный сигнал в течение 600 мс.
После получения сигнала аутентификации от БУА 18, БУД 17 сравнивает его с эталонным сигналом. Если результат совпадает, отправляет в БУА 18 сигнал разблокирования электродвигателя 23. Если сигналы не совпадают, БУД 17 снова ожидает сигнал аутентификации до истечения предварительного заданного интервала времени, и, ели не получает сигнал аутентификации, совпадающий с эталонным сигналом, направляет в БУА 18 сигнал блокирования электродвигателя 23.
На этапе 5 в случае разблокирования электродвигателя происходит включение БУД 17 с высоким напряжением, в противном случае – выдача ошибки и отключение БУД 17.
Как отмечено выше, очередность и повторяемость этапов 6, 7, 8, 9, 10, 11, 12 определяется текущей дорожной обстановкой и/или конкретной ситуацией и не является предметом охраны по настоящей заявке (Фиг. 1). Порядок перечисления этапов 6, 7, 8, 9, 10, 11, 12 в настоящей заявке не должен служить для указания единственно возможного способа осуществления предлагаемого изобретения. Упомянутые этапы относятся к работающему двигателю электромобиля, поэтому они условно объединены на блок-схеме в набор этапов, заключенный в пунктирную рамку и обозначенный позицией 13 (Фиг. 1).
На этапе 6 происходит получение БУД 17 сигналов от датчика 21 скорости вращения электродвигателя 23 и токоизмерительного датчика 20 электродвигателя 23 и переключение режима работы электродвигателя 23 между потреблением и генерацией электроэнергии на основании полученных сигналов (Фиг. 1, 2).
На этапе 7 БУД 17 получает команду на управление крутящим моментом электродвигателя 23 от БУА 18 и управление крутящим моментом электродвигателя 23 на основании полученного сигнала с обратной связью от токоизмерительного датчика 20 электродвигателя 23.
На этапе 8 происходит получение БУД 17 команды на управление скоростью вращения электродвигателя 23 от БУА 18 и управление скоростью вращения электродвигателя 23 на основании полученного сигнала с обратной связью от датчика 21 скорости вращения электродвигателя 23. При получении БУД 17 команды на управление скоростью, БУД 17 преобразует ее в команду управления крутящим моментом посредством пропорционально-интегрального регулирования и осуществляет управление крутящим моментом с обратной связью от токоизмерительного датчика 20 электродвигателя 23.
Управление крутящим моментом и скоростью вращения с обратной связью от токоизмерительного датчика 20 электродвигателя 23 позволяет создать замкнутую систему автоматического управления, непрерывно и в реальном времени управляющую скоростью вращения и/или крутящим моментом.
На этапе 9 после получения БУД 17 команды от БУА 18 на торможение электродвигателя 23, БУД 17 переключает электродвигатель 23 в режим генерации электроэнергии.
На этапе 10 после получения БУД 17 от БУА 18 команды на остановку или сигнала блокирования электродвигателя 23, БУД 17 уменьшает силу тока электродвигателя 23 до нуля; БУА 18 отправляет на БУД 17 команду на активный разряд.
На этапе 11 после получения БУД 17 от БУА 18 команды на активный разряд, или в ответ на потерю сигнала от коммуникационной шины CAN в течение предварительно заданного промежутка времени и получение БУД 17 от БУА 18 сигнала о столкновении, БУД 17 выполняет уменьшение напряжения в контуре высокого напряжения посредством осуществления активного межфазного короткого замыкания.
На этапе 12 в ответ на успешное завершение активного разряда и/или в ответ на неполучение сигнала работы сети высокого напряжения в течение предварительно заданного времени, выполняется отключение БУД 17.
БУД 17 в процессе нормальной работы осуществляет мониторинг параметров работы двигателя 23, БТИЗ 16 и контура высокого напряжения и управления на их основе крутящим моментом электродвигателя 23.
БУД 17 принимает сигналы от температурных датчиков 22 в системе, в том числе датчиков температуры электродвигателя 23 и датчиков температуры БТИЗ 16, и в случае превышения какой-либо из температур предварительно заданного порогового значения, снижает крутящий момент электродвигателя 23 до достижения безопасного состояния, в котором температура ниже указанного порогового значения.
БУД 17 также осуществляет мониторинг силы тока в контуре высокого напряжения и напряжения на клеммах шины высокого напряжения постоянного тока и в случае превышения какого-либо из указанных значений предварительно заданных пороговых значений, осуществляет защиту для предохранения БУД 17 от повреждения, например, размыкает контур БУД 17 и/или подключает шунтирующее сопротивление и направляет сообщение об ошибке в БУА 18. Кроме того, в случае превышения какого-либо из указанных значений предварительно заданных пороговых значений БУД 17 может уменьшить крутящий момент электродвигателя вплоть до нуля.
БУД 17 также осуществляет мониторинг скорости вращения электродвигателя 23. При обнаружении превышения текущей скорости вращения предварительно заданного порогового значения, БУД 17 уменьшает крутящий момент электродвигателя 23.
За счет предлагаемых дополнительных этапов управления БУД 17 обеспечивает защиту электродвигателя 23 и БТИЗ 16 от перегрева, перегрузки по току и/или напряжению, удерживает крутящий момент в безопасных границах, а также защищает электродвигатель 23 от превышения скорости.
В ответ на получение БУД 17 команды от БУА 18 на торможение, БУД 17 переключает работу двигателя 23 на режим, на котором скорость вращения больше нуля, а крутящий момент меньше нуля.
В ответ на получение БУД 17 от БУА 18 команды на остановку или сигнала блокирования электродвигателя 23, БУД 17 уменьшает силу тока электрического двигателя 23 до нуля и отправляет на БУА 18 сообщение об остановке электродвигателя 23.
Для выключения БУД 17, которое требуется при выключении питания автомобиля или при возникновении аварийной ситуации, например, столкновении, необходимо предварительно отключить его от контура высокого напряжения или понизить напряжение в его контуре, для чего используется активный разряд. При активном разряде происходит разряд энергии конденсаторов высокого напряжения и/или разряд излишней энергии, генерируемой электродвигателем 23, например, при торможении с высокой скоростью вращения электродвигателя 23, и ее рассеивание на тормозном резисторе и/или обмотке электродвигателя 23, в частности, после отключения высоковольтного контактора. Активный разряд обеспечивает безопасное состояние низкого напряжения в соединительной линии высокого напряжения, с которой могут контактировать неизолированные компоненты БУД 17, что особенно предпочтительно в случае столкновения или другой аварийной ситуации, а также может предварять процесс отключения силового контура электродвигателя 23. Кроме того, система активного разряда может быть активирована БУА 17 в ответ на обнаружение превышения скорости вращения электродвигателя 23 в режиме генерирования энергии предварительно установленного порогового значения скорости вращения и, следовательно, превышения напряжения в контуре высокого напряжения предварительно установленного порогового значения напряжения.
Таким образом, активный разряд может быть инициирован БУД 17 в случае получения от БУД 17 соответствующей команды на активный разряд (сценарий отключения питания) или в случае потери связи с коммуникационной шиной CAN в течении предварительно заданного интервала времени и получения сигнала о столкновении от БУА 18 или напрямую от датчиков столкновения, например, акселерометров (на Фиг. 2 не показаны).
В режиме активного разряда БУД 17 направляет в БУА или в блок управления батареей сигнал на отключение главного контура аккумуляторной батареи (на Фиг. 2 не показана), отключение главного реле и запуск активного межфазного короткого замыкания (Active Short Circuit). Предпочтительно, если скорость вращения двигателя 23 превышает 100 мин-1, до тех пор, пока напряжение шины постоянного тока (на Фиг. 2 не показана) не опустится до низкого напряжения.
В процессе отключения питания, когда БУД 17 получает команду на остановку двигателя, то есть команду на придание ему нулевого крутящего момента, или ошибку аутентификации, крутящий момент двигателя 17 уменьшается до нуля, и БУД 17 переходит в режим работы «ЗАВЕРШЕНИЕ РАБОТЫ». Также БУД 17 переходит в указанный режим работы при падении напряжения на шине постоянного тока до значений низкого напряжения в течение предварительно заданного интервала времени, например. Переход БУД 17 в режим «ЗАВЕРШЕНИЕ РАБОТЫ» после успешного завершения активного разряда означает успешное завершение отключение БУД 17 от контура высокого напряжения.
После успешного отключения БУД 17 от контура высокого напряжения может быть осуществлено отключение БУД 17 от контура низкого напряжения и, соответственно, выключение БУД 17.
Таким образом, заявленный способ и устройство для его реализации обеспечивают расширение функционала управления электродвигателем, в частности, обеспечение безопасности электродвигателя и электрических компонентов системы.
Предлагаемый способ управления электродвигателем электромобиля и устройство для его осуществления ориентирован на использование существующих серийных технологий производства электродвигателей, электромобилей и управляющих устройств, что позволяет говорить о промышленной применимости предлагаемого изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления электродвигателем электромобиля | 2024 |
|
RU2828633C1 |
| СИСТЕМА ЭЛЕКТРОПРИВОДА | 2006 |
|
RU2379821C1 |
| СИЛОВАЯ УСТАНОВКА ЭЛЕКТРОМОБИЛЯ, ЭЛЕКТРОМОБИЛЬ И СПОСОБ ОБОГРЕВА АККУМУЛЯТОРНОЙ БАТАРЕИ ЭЛЕКТРОМОБИЛЯ | 2013 |
|
RU2589530C1 |
| СИЛОВАЯ УСТАНОВКА ЭЛЕКТРОМОБИЛЯ, ЭЛЕКТРОМОБИЛЬ И СПОСОБ ОБОГРЕВА АККУМУЛЯТОРНОЙ БАТАРЕИ ЭЛЕКТРОМОБИЛЯ | 2013 |
|
RU2600558C2 |
| СИСТЕМА УПРАВЛЕНИЯ ПОЛНОПРИВОДНЫМ ЭЛЕКТРОМОБИЛЕМ | 2019 |
|
RU2707429C1 |
| СПОСОБ ПРИВЕДЕНИЯ В ДВИЖЕНИЕ ЭЛЕКТРИЧЕСКОГО ТРАНСПОРТНОГО СРЕДСТВА, СНАБЖЕННОГО СУПЕРКОНДЕНСАТОРНОЙ ИЛИ ИОНИСТОРНОЙ БАТАРЕЕЙ | 2018 |
|
RU2704459C1 |
| КАТУШКА ЗАЖИГАНИЯ | 1996 |
|
RU2123132C1 |
| ЭЛЕКТРОПРИВОД | 1994 |
|
RU2074505C1 |
| КАТУШКА ЗАЖИГАНИЯ | 1996 |
|
RU2117820C1 |
| СПОСОБ УПРАВЛЕНИЯ ТЯГОВЫМ ПРИВОДОМ ПЕРЕМЕННОГО ТОКА | 2006 |
|
RU2314940C1 |
Группа изобретений относится к способу управления электродвигателем электромобиля и устройству для его осуществления. Способ включает этапы: включение и самотестирование блока управления двигателем с низким напряжением; последующее включение блока управления двигателем с высоким напряжением; отключение блока управления двигателем в случае непрохождения самотестирования; получение сигналов от датчика скорости вращения электродвигателя и токоизмерительного датчика электродвигателя; управление режимами потребления и генерации электроэнергии; управление крутящим моментом и скоростью вращения электродвигателя; управление крутящим моментом электродвигателя на основе параметров работы электродвигателя, биполярных транзисторов с изолированным затвором и контура высокого напряжения. Достигается повышение безопасности эксплуатации электромобиля. 2 н. и 2 з.п. ф-лы, 2 ил.
1. Способ управления электродвигателем электромобиля, включающий этапы включения блока управления двигателем с низким напряжением по команде блока управления электромобилем; самотестирование блока управления двигателем; включение, в случае успешного прохождения самотестирования, блока управления двигателем с высоким напряжением; выдачу, в случае непрохождения самотестирования, ошибки и отключение блока управления двигателем; получение блоком управления двигателем сигналов от датчика скорости вращения электродвигателя и токоизмерительного датчика электродвигателя и переключение режима работы электродвигателя между потреблением и генерацией электроэнергии на основании полученных сигналов; получение блоком управления двигателя от блока управления электромобилем команды на управление крутящим моментом электродвигателя и управление крутящим моментом электродвигателя на основании полученного сигнала с обратной связью от токоизмерительного датчика электродвигателя; получение блоком управления двигателем от блока управления электромобилем команды на управление скоростью вращения электродвигателя и управление скоростью вращения электродвигателя на основании полученного сигнала с обратной связью от датчика скорости вращения электродвигателя; переключение блоком управления двигателем, по команде блока управления электромобилем на торможение электродвигателя, переключение электродвигателя в режим генерации электроэнергии, отличающийся тем, что включает мониторинг параметров работы электродвигателя, биполярных транзисторов с изолированным затвором и контура высокого напряжения; управление на их основе крутящим моментом электродвигателя и дополнительно содержит этапы аутентификации, выполняемой перед включением блоком управления двигателем высокого напряжения; блокирование электродвигателя после получения команды блока управления электромобилем на остановку или сигнала блокирования электродвигателя; уменьшение силы тока в электродвигателе до нуля и подачу на блок управления двигателем команды на активный разряд; уменьшение по команде на активный разряд от блока управления электромобилем или в ответ на потерю сигнала от коммуникационной шины CAN в течение предварительно заданного промежутка времени и получение блоком управления двигателем от блока управления электромобилем сигнала о столкновении напряжения в контуре высокого напряжения посредством осуществления активного межфазного короткого замыкания; отключение блока управления двигателем в ответ на успешное завершение активного разряда и/или в ответ на неполучение сигнала работы сети высокого напряжения в течение предварительно заданного времени.
2. Способ по п. 1, отличающийся тем, что параметры работы электродвигателя, биполярных транзисторов с изолированным затвором и контура высокого напряжения включают температуру электродвигателя и биполярных транзисторов с изолированным затвором, крутящий момент электродвигателя, скорость вращения электродвигателя, силу тока и напряжение контура высокого напряжения.
3. Способ по пп. 1, 2, отличающийся тем, что данные для сигнала аутентификации сохраняют в памяти блока управлением электромобилем или генерируются в нем на основании даты, времени, введенных пользователем данных и/или хранящегося в памяти блока управления электромобилем криптографического ключа, а данные для эталонного сигнала могут быть сохранены в памяти блока управления двигателем или генерируются в блоке управления электромобилем на основании даты, времени и хранящегося в памяти блока управления двигателем криптографического ключа.
4. Устройство для осуществления способа управления электродвигателем электромобиля по п.1, включающее блок управления электромобилем, блок управления двигателем, конденсатор, токоизмерительный датчик, датчик скорости вращения, электродвигатель, отличающееся тем, что дополнительно включает электромагнитный фильтр, установленный перед конденсаторами высокого напряжения.
| CN 103419659 A, 04.12.2013 | |||
| JP 2007104768 A, 19.04.2007 | |||
| WO 2016185601 A1, 24.11.2016 | |||
| JP H11252990 A, 17.09.1999 | |||
| МОНОХРОМАТОР | 0 |
|
SU175680A1 |

