Область техники
Изобретение относится к способам управления тяговыми двигателями транспортных средств и может быть использовано в электромобилях.
Предшествующий уровень техники
Известен метод управления энергетической системой полноприводного автомобиля, включающий получение блоком управления двигателем (далее – БУД) команды на управление крутящим моментом электродвигателя от блока управления автомобилем (далее – БУА) и управление крутящим моментом электродвигателя на основании полученного сигнала с обратной связью от токоизмерительного датчика электродвигателя (пат. WO 2023082854, опубл. 19.05.2023).
К недостаткам известного решения относится неудовлетворительная безопасность работы электродвигателя и БУД ввиду отсутствия мониторинга крутящего момента и температуры.
Наиболее близким по совокупности существенных признаков – прототипом заявляемого изобретения – является способ управления электродвигателем, включающий мониторинг в режиме реального времени силы тока и температуры БУД и принятие решения об изменении режима работы в зависимости от величины отслеживаемых параметров (пат. №
RU 2657868, опубл. 18.06.2018. Бюл. №17). По известному решению, критериями могут являться события чрезмерного увеличения фазных токов и/или скорости вращения электродвигателя, и/или равенства или превышения фактической температуры порогового значения.
К недостаткам известного решения относится его ограниченные возможности по контролю крутящего момента электродвигателя.
Раскрытие изобретения
В контексте настоящей заявки в качестве синонимов будут использованы следующие понятия:
- «электродвигатель электромобиля», «тяговый электродвигатель электромобиля»;
- «крутящий момент», «крутящий момент электродвигателя».
Технической задачей, на решение которой было направлено создание настоящего изобретения является обеспечение дополнительного контроля крутящего момента тягового электродвигателя электромобиля.
Технический результат осуществления предлагаемого изобретения заключается в повышении безопасности электромобиля.
Решение поставленной технической задачи достигается за счет осуществления трехуровневого контроля крутящего момента электродвигателя следующим образом: на первом уровне состояние электродвигателя определяют, как безопасное, при достижении крутящим моментом предварительно заданного нижнего порогового значения крутящего момента; на втором уровне текущее фактическое значение крутящего момента электродвигателя сравнивают с требуемой величиной крутящего момента электродвигателя и состояние электродвигателя определяют, как безопасно, если разница между фактической и требуемой величинами не превышает предварительно заданную величину; на третьем уровне осуществляют мониторинг в режиме реального времени напряжения, силы тока и температуры БУД и состояние электродвигателя определяют, как безопасное, если упомянутые параметры находятся в пределах предварительно заданных безопасных граничных значений, причем если состояние электродвигателя не определено безопасным, управляют крутящим моментом электродвигателя так, чтобы обеспечить безопасное состояние, и, если безопасное состояние электродвигателя не достигается в течение предварительно заданного времени, БУД направляет в БУА сообщение об ошибке и команду на остановку электродвигателя.
Новизной предлагаемого технического решения является введение в способ управления электродвигателем электромобиля двух дополнительных уровней контроля крутящего момента, а именно, определения на первом уровне состояния электродвигателя, как безопасного, при достижении крутящим моментом предварительно заданного нижнего порогового значения крутящего момента, сравнения на втором уровне текущей фактической величины крутящего момента с требуемой величиной крутящего момента электродвигателя и определение состояния, как безопасного в том случае, если разница между фактическим и заданным значениями крутящего момента не превышает предварительно заданную величину, и введение мониторинга в режиме реального времени напряжения тока на электродвигателе.
Крутящий момент определяется силой тока на электродвигателе в двигательном режиме работы, тогда как в режиме генерирования энергии, то есть, в режиме генератора, сила тока на электродвигателе зависит от сопротивления контура, в который подключён электродвигатель, внутреннего сопротивления обмоток электродвигателя и скорости вращения ротора электродвигателя. Таким образом, крутящий момент напрямую влияет на силу тока в контуре высокого напряжения и температуру электродвигателя и БУД. В результате трехуровневая система контроля крутящего момента в заявленном способе обеспечивает температурную, электрическую и механическую безопасность электродвигателя и БУД.
В нормальном режиме работы БУА получает сигналы от педали акселератора электромобиля, преобразует их в команды управления крутящим моментом и в команды управления скоростью вращения и направляет в БУД.
При получении БУД команды на управление крутящим моментом, БУД преобразует ее в команду управления током на электродвигателе и осуществляет управление крутящим моментом электродвигателя с обратной связью от токоизмерительного датчика электродвигателя, то есть, по замкнутому контуру с токоизмерительным датчиком. Управление крутящим моментом и скоростью вращения с обратной связью от токоизмерительного датчика электродвигателя позволяет создать замкнутую систему автоматического управления, непрерывно и в реальном времени управляющую скоростью вращения и/или крутящим моментом.
Кроме того, БУД принимает сигналы от температурных датчиков в системе, в том числе датчиков температуры электродвигателя и датчиков температуры, и в случае превышения какой-либо из температур предварительно заданного порогового значения, снижает крутящий момент электродвигателя до достижения безопасного состояния, в котором температура ниже указанного порогового значения.
Кроме того, БУД осуществляет мониторинг силы тока в контуре высокого напряжения и напряжения на клеммах шины высокого напряжения постоянного тока и в случае превышения какого-либо из указанных значений предварительно заданных пороговых значений, осуществляет защиту для предохранения БУД от повреждения, например, размыкает контур БУД и/или подключает шунтирующее сопротивление и направляет сообщение об ошибке в БУА. Кроме того, в случае превышения какого-либо из указанных значений предварительно заданных пороговых значений БУД может уменьшить крутящий момент вплоть до нуля.
Кроме того, БУД осуществляет мониторинг скорости вращения электродвигателя и при обнаружении превышения текущей скорости вращения предварительно заданного порогового значения, уменьшает крутящий момент.
Упомянутые предварительно заданные безопасные нижнее пороговое значение, величина разницы между фактическим и требуемым значением крутящего момента, граничные значения напряжения, силы тока и температуры БУД определяют так, чтобы указанные значения обеспечивали безопасную безаварийную работу электродвигателя и БУД согласно проведенным испытаниям или согласно рекомендациям производителя электродвигателя и БУД. Конкретные значения указанных величин не являются предметом охраны по настоящей заявке.
Указанный признак является новым, существенным, с точки зрения достижения заявленного технического результата, и промышленно применимым, так как основан на известных технологиях.
Краткое описание чертежей
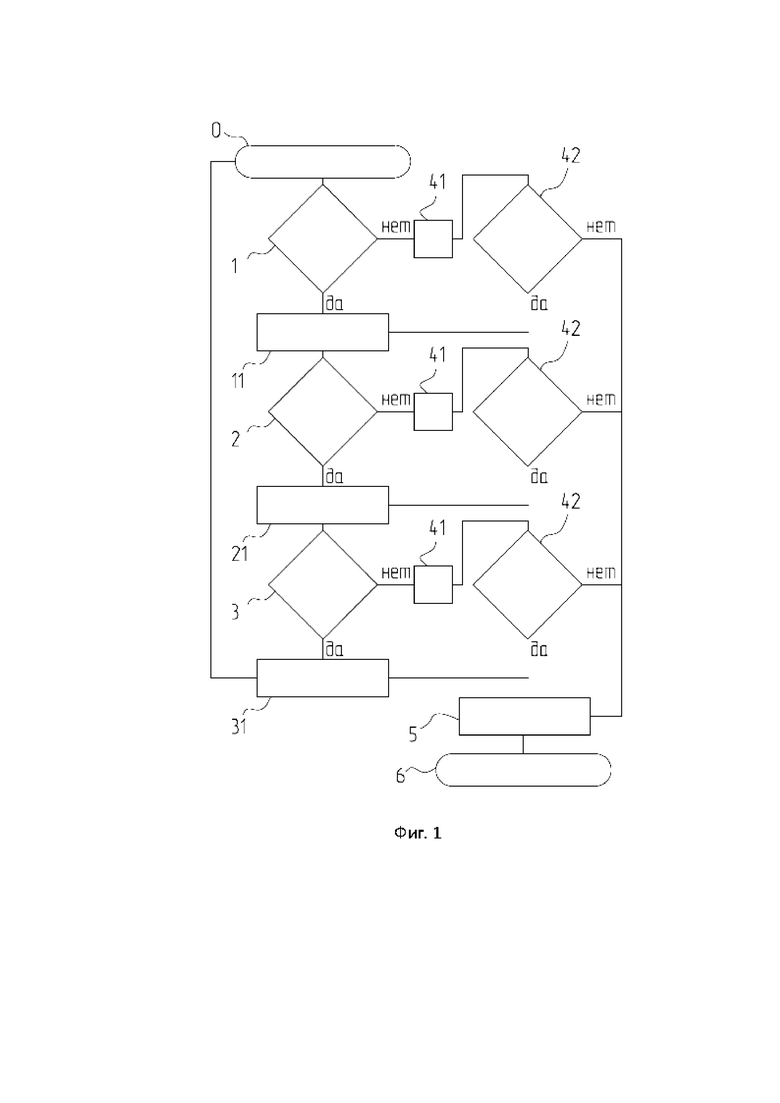
На Фиг. 1 представлена блок-схема предлагаемого способа управления электродвигателем электромобиля.
Осуществления изобретения
Осуществление предлагаемого способа управления электродвигателем электромобиля иллюстрируется блок-схемой, на которой обозначены основные этапы осуществления способа (Фиг. 1). Начало осуществления показано в виде условного – нулевого – этапа (обозначен «0»).
Позициями 1, 2, 3 обозначены уровни контроля крутящего момента.
На уровне 1 контроля крутящего момента происходит определение фактической величины крутящего момента. Если фактическая величина достигла безопасного предварительно заданного нижнего порогового значения крутящего момента, состояние электродвигателя определяют как безопасное, при достижении крутящим моментом включение БУД с низким напряжением (событие принятия такой оценки на блок-схеме обозначено позицией 11).
На уровне 2 выполняют сравнение текущей фактической величины крутящего момента с требуемым значением. Если разница между этими величинами не превышает заданной величины, состояние электродвигателя определяют как безопасное (событие принятия такой оценки на блок-схеме обозначено позицией 21).
На уровне 3 контроля крутящего момента осуществляют мониторинг в режиме реального времени напряжения, силы тока и температуры БУД. Состояние электродвигателя определяют как безопасное, если упомянутые параметры находятся в пределах предварительно заданных безопасных граничных значений (событие принятия такой оценки на блок-схеме обозначено позицией 21).
На каждом уровне контроля возможно непринятие оценки состояния электродвигателя как безопасное. В этих случаях управляют с помощью БУД крутящим моментом электродвигателя так, чтобы обеспечить безопасное состояние (этапы 41 на блок-схеме). При этом выполняют мониторинг состояния электродвигателя для проверки достижения электродвигателем в течение предварительно заданного времени состояния, которое будет оценено, как безопасное (этапы 42 на блок-схеме). В том случае, если безопасное состояние электродвигателя не будет достигнуто, вне зависимости от причин этого события, БУД направляет в БУА сообщение об ошибке и команду на остановку электродвигателя (этап 5 на блок-схеме). На этом управление крутящим моментом двигателя прекращается (этап 6 на блок-схеме).
Как отмечено выше, за счет предлагаемых дополнительных этапов управления БУД обеспечивает защиту электродвигателя и БУД от перегрева, перегрузки по току и/или напряжению, удерживает крутящий момент в безопасных границах, а также защищает электродвигателя от превышения скорости.
Таким образом, предлагаемый способ управления электродвигателем электромобиля обеспечивает достижение заявленного технического результата, а именно, повышение безопасности эксплуатации электромобиля.
Предлагаемый способ управления электродвигателем электромобиля ориентирован на использование существующих серийных технологий производства электродвигателей, электромобилей и управляющих устройств. Это позволяет говорить о промышленной применимости предлагаемого изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления электродвигателем электромобиля и устройство для его осуществления | 2024 |
|
RU2828632C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ В ПОЛЕТЕ ИЗГИБНЫХ НАПРЯЖЕНИЙ НА ВАЛУ НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА С ТОРСИОННОЙ ВТУЛКОЙ НЕСУЩЕГО ВИНТА | 2016 |
|
RU2631557C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОЛНОПРИВОДНЫМ ЭЛЕКТРОМОБИЛЕМ | 2019 |
|
RU2707429C1 |
| СИСТЕМА И СПОСОБ ДИНАМИЧЕСКОГО РЕГУЛИРОВАНИЯ АКТИВНОЙ МОЩНОСТИ НА НАГРУЗКЕ | 2010 |
|
RU2528621C2 |
| Устройство управления аппаратами для перемешивания жидкости в резервуарах | 2022 |
|
RU2795334C1 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ И КОНТРОЛЯ ЗАРЯДНЫМ КОМПЛЕКСОМ ЭЛЕКТРОМОБИЛЕЙ | 2016 |
|
RU2608387C1 |
| СИЛОВАЯ УСТАНОВКА ЭЛЕКТРОМОБИЛЯ, ЭЛЕКТРОМОБИЛЬ И СПОСОБ ОБОГРЕВА АККУМУЛЯТОРНОЙ БАТАРЕИ ЭЛЕКТРОМОБИЛЯ | 2013 |
|
RU2589530C1 |
| ЭЛЕКТРОМОБИЛЬ | 2001 |
|
RU2205115C2 |
| Способ управления ускорением и замедлением транспортного средства с тяговым электрическим приводом с помощью одной педали хода | 2023 |
|
RU2799275C1 |
| Система предзаряда для электрического высокоавтоматизированного транспортного средства категории N3 | 2023 |
|
RU2817426C1 |
Изобретение относится к способу управления электродвигателем электромобиля. Способ включает мониторинг в режиме реального времени силы тока и температуры блока управления двигателем и принятие решения об изменении режима работы в зависимости от величины отслеживаемых параметров. Способ включает уровни контроля крутящего момента. На первом уровне, состояние электродвигателя определяют, как безопасное, при достижении крутящим моментом предварительно заданного нижнего порогового значения крутящего момента. На втором уровне определяют текущее фактическое значение крутящего момента электродвигателя, сравнивают с требуемой величиной крутящего момента электродвигателя. На третьем уровне осуществляют мониторинг напряжения, силы тока и температуры блока управления двигателем. Если состояние электродвигателя не определено безопасным, управляют крутящим моментом электродвигателя так, чтобы обеспечить безопасное состояние. Если безопасное состояние электродвигателя не достигается в течение заданного времени, блок управления двигателем направляет в блок управления электромобилем сообщение об ошибке и команду на остановку электродвигателя. Достигается повышение безопасности электромобиля. 1 ил.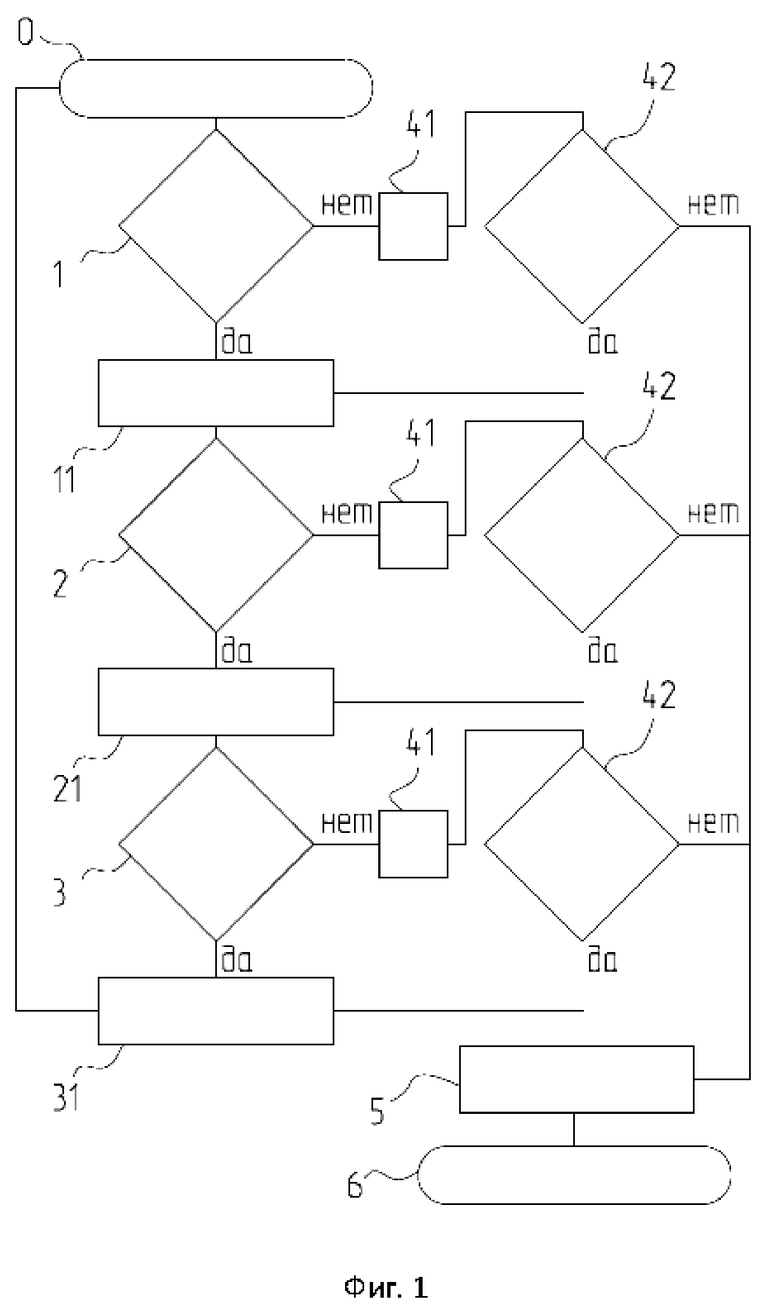
Способ управления электродвигателем электромобиля, включающий мониторинг в режиме реального времени силы тока и температуры блока управления двигателем и принятие решения об изменении режима работы в зависимости от величины отслеживаемых параметров, отличающийся тем, что включает дополнительные уровни контроля крутящего момента, на первом из которых состояние электродвигателя определяют, как безопасное, при достижении крутящим моментом предварительно заданного нижнего порогового значения крутящего момента, на втором уровне контроля текущее фактическое значение крутящего момента электродвигателя сравнивают с требуемой величиной крутящего момента электродвигателя и состояние электродвигателя определяют, как безопасное, если разница между фактической и требуемой величинами не превышает предварительно заданную величину, на третьем уровне осуществляют мониторинг в режиме реального времени напряжения, силы тока и температуры блока управления двигателем и состояние электродвигателя определяют, как безопасное, если упомянутые параметры находятся в пределах предварительно заданных безопасных граничных значений, причем если состояние электродвигателя не определено безопасным, управляют с помощью блока управления двигателем крутящим моментом электродвигателя так, чтобы обеспечить безопасное состояние, и, если безопасное состояние электродвигателя не достигается в течение предварительно заданного времени, блок управления двигателем направляет в блок управления электромобилем сообщение об ошибке и команду на остановку электродвигателя.
| CN 103419659 A, 04.12.2013 | |||
| JP 2007104768 A, 19.04.2007 | |||
| WO 2016185601 A1, 24.11.2016 | |||
| JP H11252990 A, 17.09.1999 | |||
| МОНОХРОМАТОР | 0 |
|
SU175680A1 |

