ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к робототехнике и может быть использовано при проектировании тросовых систем крупногабаритных тросовых параллельных роботов.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Из уровня техники известны подобные механизмы, однако, назначение их отличается от назначения заявленного устройства, например механический предохранитель для шейного шнура (см. US2013025099A1, опубл 31.01.2013). Механический предохранитель размыкает шейный шнур, когда составляющая тянущей силы в заданном направлении превышает заданное усилие предохранителя, при котором разрывной элемент, включенный в механический предохранитель, предназначен для разрушения. Разрывной элемент имеет плоскость разрыва, в которой произойдет разрушение, когда составляющая тянущей силы приводит к тому, что напряжение в плоскости разрыва превышает значение, определяемое указанной силой плавления. Механический предохранитель дополнительно содержит корпус, который предназначен для направления компонента тянущей силы в указанном заданном направлении к плоскости разрыва, тогда как передача компонента силы, имеющего другое направление, подавляется.
Наиболее близким аналогом заявленного устройства может быть выбран механический (см. US7080572B2, опубл. 25.07.2006-07-25) предохранитель для рычажного механизма передачи усилия, содержащий: первый компонент, имеющий фиксатор и седло, приспособленные для приема первого сжимающего элемента; второй компонент, имеющий бобышку и седло, приспособленные для приема второго сжимающего элемента; пружину, расположенную между указанным первым компонентом и указанным вторым компонентом, причем указанная пружина выбрана из группы, состоящей из пружины расширения и пружины сжатия; и фрикционная посадка, оперативно зацепляющая указанный выступ с указанным фиксатором, причем указанный первый компонент и указанный второй компонент скреплены вместе в относительном положении по отношению друг к другу; при этом указанная фрикционная посадка освобождает указанную бобышку из указанного фиксатора, когда осевая сжимающая сила достигает предварительно заданного порога, и при этом указанный первый компонент и указанный второй компонент перемещаются относительно друг друга из указанного относительного положения в сжатое положение.
Предложенный аналог имеет сходные цели с заявленным устройством, однако поскольку назначение данных устройств не совпадает.
При анализе уровня техники не выявлены средства аналогичного назначения с заявленным устройством, были выявлены только подобные, которые и были приведены.
КРАТКОЕ ИЗЛОЖЕНИЕ ИЗОБРЕТЕНИЯ
В наиболее распространенных конфигурациях тросовых систем обрыв тросов возможен в двух случаях: износ материала троса, в результате которого образуются механические дефекты, или программный сбой, в результате которого нарушается заданное распределение сил натяжения. В случае износа материала тросов обрывам подвержены в первую очередь тросы верхней группы, при этом для избыточных систем обрыв одного любого троса верхней группы не приводит к падению мобильной платформы робота. При обрыве троса верхней группы, в силу специфики наиболее распространенных конфигураций тросовых систем, непременно последует обрыв одного или нескольких тросов нижней группы. Механическое устройство аварийного отсоединения тросового привода предполагается к использованию для аварийного отсоединения тросов нижней группы при резком увеличении усилия натяжения, способного вызвать обрыв тросов.
Технической задачей изобретения является экстренное отсоединение тросов нижней группы в аварийном режиме, тем самым избегая обрыва тросов нижней группы и дорогостоящего ремонта системы тросового робота.
Технический результат изобретения заключается в сохранении целостности элементов нижней группы тросов при обрыве какого-либо из тросов верхней группы: сохранность самих тросов, системы обводных роликов, а также электроприводов в случае резкого увеличения силы натяжения в группе нижних тросов.
Технический результат достигается посредством включения в кинематическую цепь группы нижних тросов механических предохранителей, в аварийном режиме осуществляющих разрыв кинематических цепей группы нижних тросов, при этом разрыв кинематических цепей происходит не вследствие разрушающих деформаций элементов системы тросов, а вследствие открытия фрикционно-инерционного замка механического предохранителя при резком рывке троса.
Механизм отсоединения тросового привода в аварийном режиме, содержит корпус замка, в котором размещен замок, выполненный в виде двух подвижных симметричных частей, закреплённых на оси, на котором также выполнена канавка для петли-проушины троса
Механизм отсоединения характеризуется тем, что отверстие корпуса замка, выполнено ступенчатым, при этом диаметр отверстия верхней части больше диаметра отверстия нижней части, которая выполнена таким образом, чтобы замок в сомкнутом состоянии мог пройти через отверстие, внутри подвижных симметричных частей замка размещен фрикционно-инерционный клин, нижняя часть которого по форме соответствует нижней части внутренних поверхностей подвижных симметричных частей замка при смыкании.
В одном из вариантов выполнения фрикционно-инерционный клин выполнен в виде пятиугольной пирамиды.
В одном из вариантов выполнения узел фрикционно-инерционного замка механического предохранителя выполняется в виде составного цилиндра, собранного из двух подвижных симметричных частей с выбранными пазами и фрикционно-инерционным клином, открывающим и закрывающим замок.
В одном из вариантов выполнения срабатывание механического предохранителя и открытие замка задается характеристиками шероховатости поверхностей контакта фрикционно-инерционного клина и подвижных симметричных частей замка.
В одном из вариантов выполнения срабатывание механического предохранителя и открытие замка задается геометрическими характеристиками поверхностей контакта фрикционно-инерционного клина и подвижных симметричных частей замка, а именно углом сектора клина, и углом раствора подвижных симметричных частей замка.
В одном из вариантов выполнения срабатывание механического предохранителя и открытие замка задается геометрическими характеристиками выпуклой поверхности фрикционно-инерционного клина, а именно радиусом кривизны и высотой купола внешней части клина.
В одном из вариантов выполнения срабатывание механического предохранителя и открытие замка задается инерционными характеристиками фрикционно-инерционного клина и подвижных симметричных частей замка, а именно моментами инерции, определяемыми на этапе проектирования указанных деталей замка.
В одном из вариантов выполнения механизм замка может изготавливаться полностью из конструкционных сталей, фрикционно-инерционный клин может изготавливаться из бронзы либо иных цветных металлов.
КРАТКОЕ ОПИСАНИЕ РИСУНКОВ
Заявляемое изобретение иллюстрируется чертежами, где:
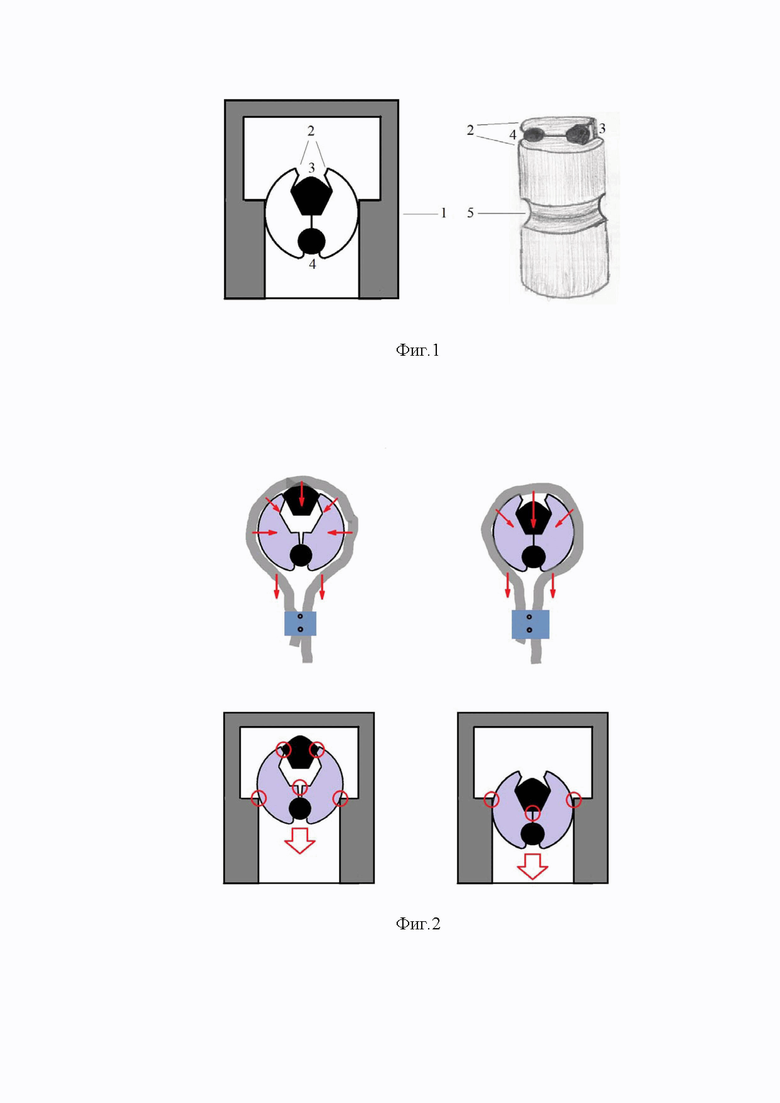
фиг. 1 – схематичное обобщенное изображение фрикционно-инерционного замка механизма отсоединения тросового привода крупногабаритного параллельного тросового робота в аварийном режиме (замок открыт):
1 – корпус замка;
2 – подвижные симметричные части замка;
3 – фрикционно-инерционный клин;
4 – ось подвижных частей замка;
5 – канавка для петли-проушины троса;
фиг. 2 – схема срабатывания механизма фрикционно-инерционного замка;
Эти чертежи не охватывают и, кроме того, не ограничивают весь объем вариантов реализации данного технического решения, а представляют собой только иллюстративный материал частного случая его реализации.
ВАРИАНТ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Механизмы отсоединения тросового привода крупногабаритного параллельного тросового робота в аварийном режиме включаются в кинематическую цепь группы нижних тросов, в петлю-проушину троса со стороны крепления к мобильной платформе, и в аварийном режиме осуществляют разрыв кинематических цепей группы нижних тросов, при этом разрыв кинематических цепей происходит не вследствие разрушающих деформаций элементов системы тросов, а вследствие открытия фрикционно-инерционного замка механического предохранителя при резком рывке троса.
Основным узлом механизма отсоединения тросового привода крупногабаритного параллельного тросового робота в аварийном режиме является фрикционно-инерционный замок механического предохранителя, открывающийся при резком рывке троса.
Механизм отсоединения тросового привода в аварийном режиме, содержащий корпус замка (1), в котором размещен замок, выполненный в виде двух подвижных симметричных частей (2), закреплённых на оси (4), на котором также выполнена канавка (5) для петли-проушины троса. Отверстие корпуса замка, выполнено ступенчатым, при этом диаметр отверстия верхней части больше диаметра отверстия нижней части, которая выполнена таким образом, чтобы замок в сомкнутом состоянии мог пройти через отверстие. Внутри подвижных симметричных частей замка размещен фрикционно-инерционный клин (3), нижняя часть которого по форме соответствует нижней части внутренних поверхностей подвижных симметричных частей (2) замка при смыкании. Фрикционно-инерционный клин может быть выполнен в виде пятиугольной пирамиды.
При штатном режиме работы крупногабаритного параллельного тросового робота замок находится в закрытом состоянии. Замок плотно охватывается петлей-проушиной троса, которая под действием силы натяжения троса одновременно сдавливает две подвижные симметричные части с выбранными пазами, которые выдавливают фрикционно-инерционный клин, и вдавливает фрикционно-инерционный клин между двумя подвижными симметричными частями с выбранными пазами, которые раздвигаются фрикционно-инерционным клином. Силы сухого трения, с одной стороны, между тросом и двумя подвижными симметричными частями, и, с другой стороны, между фрикционно-инерционным клином и двумя подвижными симметричными частями, обеспечивают статическое равновесие системы сил, и, таким образом замок находится в закрытом состоянии.
При аварийном режиме работы крупногабаритного параллельного тросового робота замок открывается. При резком и сильном рывке какого-либо из тросов нижней группы петля-проушина троса передает импульс на купол внешней части фрикционно-инерционного клина, который преодолевая силу сухого трения между фрикционно-инерционным клином и двумя подвижными симметричными частями входит в паз между двумя подвижными симметричными частями замка, под действием силы натяжения троса две подвижные симметричные части с выбранными пазами смыкаются и замок открывается.
Механизм замка может изготавливаться полностью из конструкционных сталей, также фрикционно-инерционный клин может изготавливаться из бронзы либо иных цветных металлов.
Предложенный механизм отсоединения тросового привода крупногабаритного параллельного тросового робота в аварийном режиме для нижней группы тросов не имеет аналогов среди известных методов, применимых к тросовым параллельным роботам.
Полностью механическое устройство с минимальным количество элементов обеспечивает высокую надежность фрикционно-инерционного замка механизма отсоединения тросового привода крупногабаритного параллельного тросового робота.
Предложенный механизм вместе со страховочным тросом способствует повышению эксплуатационной безопасности крупногабаритного параллельного тросового робота, поскольку исключает обрыв и последующий неконтролируемый хлыстовой удар конца троса.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство аварийного отсоединения нагруженного троса тросового робота | 2023 |
|
RU2832264C1 |
| Платформа с механизмом погрузки для перевозки миномета | 2024 |
|
RU2841415C1 |
| СПОСОБ РАЗГРУЗКИ ДВУХКОЛЕЙНОГО СЕКЦИОННОГО МЕХАНИЗИРОВАННОГО МОСТА С ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2111874C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ БУКСИРОВКИ АВАРИЙНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 1992 |
|
RU2081765C1 |
| ЗАМОК ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2229007C1 |
| КОМПЛЕКТ УНИВЕРСАЛЬНОГО ДОВОДЧИКА АВТОМОБИЛЬНОЙ ДВЕРИ И СПОСОБ ЕГО УСТАНОВКИ | 2021 |
|
RU2765660C1 |
| СИСТЕМА Ю.Н.КУНГУРЦЕВА ДЛЯ ПОДЪЕМА ЗАТОНУВШЕГО ОБЪЕКТА | 1991 |
|
RU2033371C1 |
| АНКЕРНЫЙ ЗАМОК ДЛЯ ЗАКРЕПЛЕНИЯ ТРОСА В СКВАЖИНЕ | 2005 |
|
RU2287690C1 |
| Вертолетная внешняя подвеска | 2015 |
|
RU2608824C1 |
| УСТРОЙСТВО ДЛЯ КРЕПЛЕНИЯ ГРУЗОВОГО КОНТЕЙНЕРА К ПОДВЕСНОЙ СИСТЕМЕ ПАРАШЮТА | 2015 |
|
RU2587381C1 |
Изобретение относится к робототехнике и может быть использовано при проектировании тросовых систем крупногабаритных тросовых параллельных роботов. Механизм отсоединения тросового привода в аварийном режиме содержит корпус замка с отверстием, в котором размещен замок, причем замок выполнен в виде двух подвижных симметричных частей, закреплённых на оси, на которых выполнена канавка для петли-проушины троса, отверстие корпуса замка выполнено ступенчатым, при этом диаметр отверстия верхней части больше диаметра отверстия нижней части, которая выполнена таким образом, что замок в сомкнутом состоянии имеет возможность прохождения через отверстие корпуса замка, внутри подвижных симметричных частей замка размещен фрикционно-инерционный клин, нижняя часть которого по форме соответствует нижней части внутренних поверхностей подвижных симметричных частей замка при смыкании. Технический результат заключается в сохранении целостности элементов нижней группы тросов при обрыве какого-либо из тросов верхней группы: сохранность самих тросов, системы обводных роликов, а также электроприводов в случае резкого увеличения силы натяжения в группе нижних тросов. 2 з.п. ф-лы, 2 ил.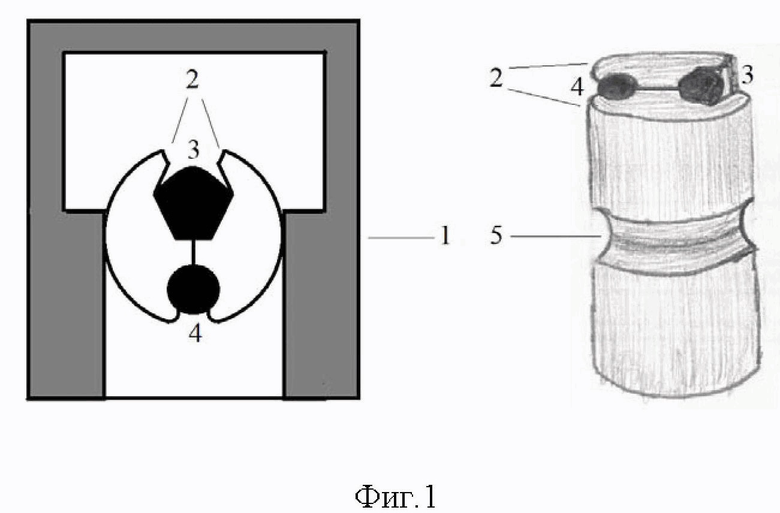
1. Механизм отсоединения тросового привода в аварийном режиме, содержащий корпус замка с отверстием, в котором размещен замок, отличающийся тем, что замок выполнен в виде двух подвижных симметричных частей, закреплённых на оси, на которых выполнена канавка для петли-проушины троса, отверстие корпуса замка выполнено ступенчатым, при этом диаметр отверстия верхней части больше диаметра отверстия нижней части, которая выполнена таким образом, что замок в сомкнутом состоянии имеет возможность прохождения через отверстие корпуса замка, внутри подвижных симметричных частей замка размещен фрикционно-инерционный клин, нижняя часть которого по форме соответствует нижней части внутренних поверхностей подвижных симметричных частей замка при смыкании.
2. Механизм отсоединения по п.1, отличающийся тем, что фрикционно-инерционный клин выполнен в виде пятиугольной пирамиды.
3. Механизм отсоединения по п.1, отличающийся тем, что механизм замка изготовлен полностью из конструкционных сталей, а фрикционно-инерционный клин изготовлен из бронзы или цветных металлов.
| DE 1225451 B, 22.09.1966 | |||
| US 8936290 B1, 20.01.2015 | |||
| WO 2011125019 A1, 13.10.2011 | |||
| US 7080572 B2, 25.07.2006 | |||
| US 3205716 A, 14.09.1965 | |||
| CN 108150608 A, 12.06.2018 | |||
| US 6776116 B2, 17.08.2004 | |||
| Манипулятор гибкий | 2016 |
|
RU2641602C2 |

