Изобретение относится к области машиностроения, точнее к манипуляторам, и может быть использовано в лесной промышленности, сельском и лесном хозяйствах.
Известен манипулятор гибкий, включающий каретку с приводами, гибкие элементы, крестовину, приводные барабаны, формообразующие и формостабилизирующие элементы (Патент РФ №2250818, кл. B25J 01/02, 2003).
Известный манипулятор гибкий имеет только четыре гибких элемента, что влияет на их нагруженность и высокие требования по их жесткости, длина манипулятора зависит от допустимого растяжения лент, манипулятор не имеет возможности изменять угол наклона отдельной секции.
Наиболее близким к предлагаемому манипулятору гибкому известен манипулятор, включающий основание секции, коленчатый вал, исполнительные звенья, соединенный с соответствующим коленом коленчатого вала и гибкие, предварительно нагруженные связи (патент СССР №1696303, кл. B25J 18/06, 1991).
Недостатком данного манипулятора гибкого являются невысокие воспринимаемые нагрузки, сложное техническое обслуживание, небольшая рабочая область.
Технический результат в предлагаемом решении заключается в повышении жесткости и грузоподъемности манипулятора гибкого при сохранении его гибкости и расширении зоны действия.
Технический результат достигается тем, что манипулятор гибкий, содержащий секции с основаниями, соединенными центральной осью и гибкими предварительно напряженными связями, согласно изобретению, он снабжен управляющими тросами, натянутыми вдоль манипулятора, а ось каждой секции снабжена карданом, при этом гибкие связи выполнены в виде лент, один конец которых шарнирно связан с основанием секции, а другой - закреплен на основании секции посредством фиксаторов.
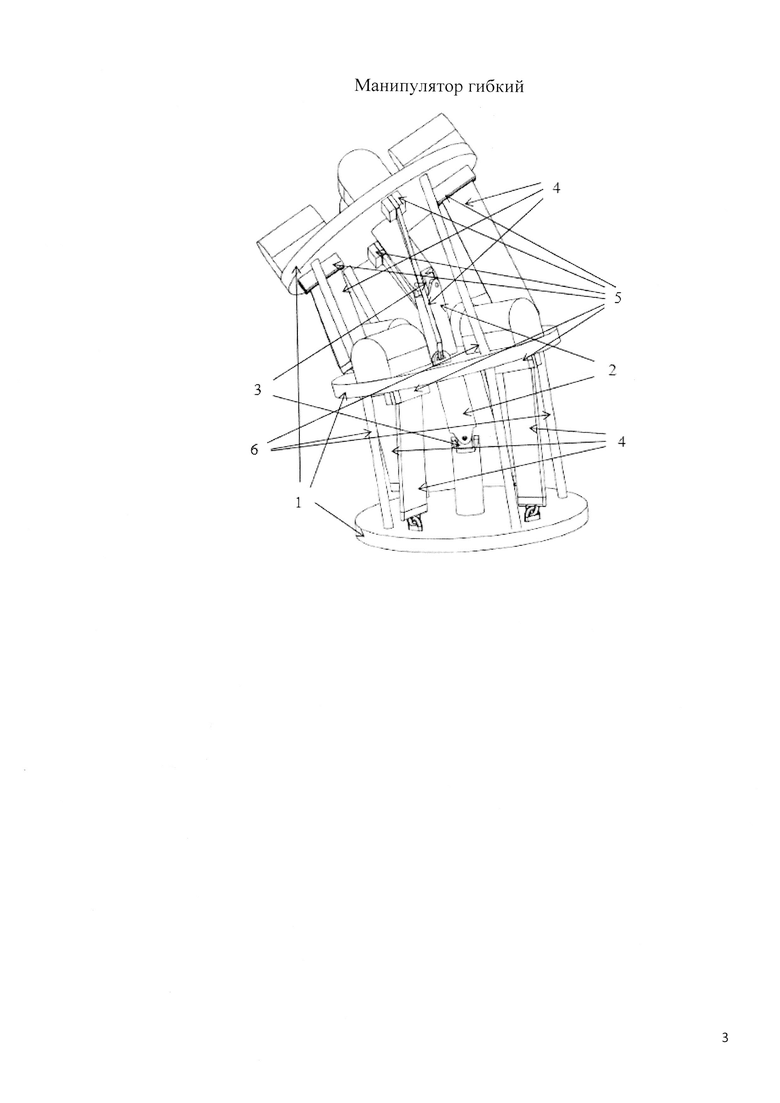
Манипулятор гибкий включает основания секции 1, связанные центральной осью 2, в которой между основаниями 1 вмонтированы карданы 3. Основания 1 соединены гибкими лентами 4, одними концами шарнирно-связанными с основанием 1, а другим - посредством фиксаторов 5. Манипулятор гибкий снабжен управляющими тросами 6, натянутыми вдоль всей длины манипулятора гибкого.
Манипулятор гибкий работает следующим образом.
Для изменения вылета и радиуса кривизны манипулятора гибкого необходимо изменить длину гибких лент 4 с помощью управляющих тросов 6. С этой целью снимаем фиксаторы 5 с гибких лент 4 посредством известных конструкций электроприводов и передаточных механизмов (не показаны), изменением расстояния между точками крепления гибких лент 4 с основаниями 1 в необходимом направлении и в нужной отдельной секции или всего манипулятора гибкого. В результате этих действий центральная ось 2 изменяет положение своих частей благодаря карданам 3. В результате выше описанных действий изменяет положение основания 1 относительно друг друга, и как результат изменится радиус манипулятора гибкого. После этого фиксаторами 5 закрепляем полученное положение гибких лент 4.
Предлагаемый манипулятор гибкий позволяет повысить грузоподъемность при сохранении гибкости и увеличении жесткости, расширить рабочую зону и применение манипулятора в ограниченном пространстве.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор лесохозяйственной машины | 2022 |
|
RU2780834C1 |
| ЗАХВАТ | 2014 |
|
RU2570597C1 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ | 1998 |
|
RU2140367C1 |
| Ведущий манипулятор роботохирургического комплекса | 2022 |
|
RU2803231C1 |
| Устройство управления манипуляторами роботохирургического комплекса | 2020 |
|
RU2757969C1 |
| Исполнительное устройство промышленного робота | 1985 |
|
SU1301701A1 |
| Устройство для перекрытия проема | 1990 |
|
SU1738988A1 |
| СИСТЕМА ПЕРЕДАЧИ ТЕКУЧЕЙ СРЕДЫ ПОСРЕДСТВОМ ПОДВЕШЕННОГО ТРУБОПРОВОДА | 2000 |
|
RU2246443C2 |
| УНИВЕРСАЛЬНЫЙ КОМПЛЕКС ДОЛИНСКОГО УКД, СЕКЦИЯ КРЕПИ (ВАРИАНТЫ), ПЕРЕКРЫТИЕ КРЕПИ, ВЫДВИЖНОЙ КОЗЫРЕК, СТАВ, ЛЕНТОЧНЫЙ КОНВЕЙЕР, МЕХАНИЗМ ЦЕНТРИРОВАНИЯ ЛЕНТЫ, УСТРОЙСТВО УПРАВЛЕНИЯ КОНВЕЙЕРА, КОМБАЙН ОЧИСТНОЙ (ВАРИАНТЫ), УСТРОЙСТВО ПОДЪЕМА БАРАБАНА КОМБАЙНА, ПРИВОД ОТБОЙНОГО БАРАБАНА КОМБАЙНА, СПОСОБ ОБЕСПЫЛИВАНИЯ РАБОЧЕГО ПРОСТРАНСТВА, УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ, МАНИПУЛЯТОР ОЧИСТНОГО КОМПЛЕКСА, ЛЕСТНИЦА СТОЕЧНАЯ | 1997 |
|
RU2130554C1 |
| Установка для разработки вертикальных скважин большого диаметра | 1978 |
|
SU737578A1 |
Изобретение относится к области машиностроения, а именно к манипуляторам, и может быть использовано в лесной промышленности, сельском и лесном хозяйствах. Манипулятор гибкий содержит секции с основаниями, соединенными центральной осью и гибкими предварительно напряженными связями, и управляющие тросы, натянутые вдоль манипулятора. Ось каждой секции снабжена карданом, а гибкие связи выполнены в виде лент, один конец которых шарнирно связан с основанием секции, а другой - закреплен на основании секции посредством фиксаторов. Изобретение обеспечивает повышение жесткости и грузоподъемности манипулятора при сохранении его гибкости и расширении рабочей зоны. 1 ил.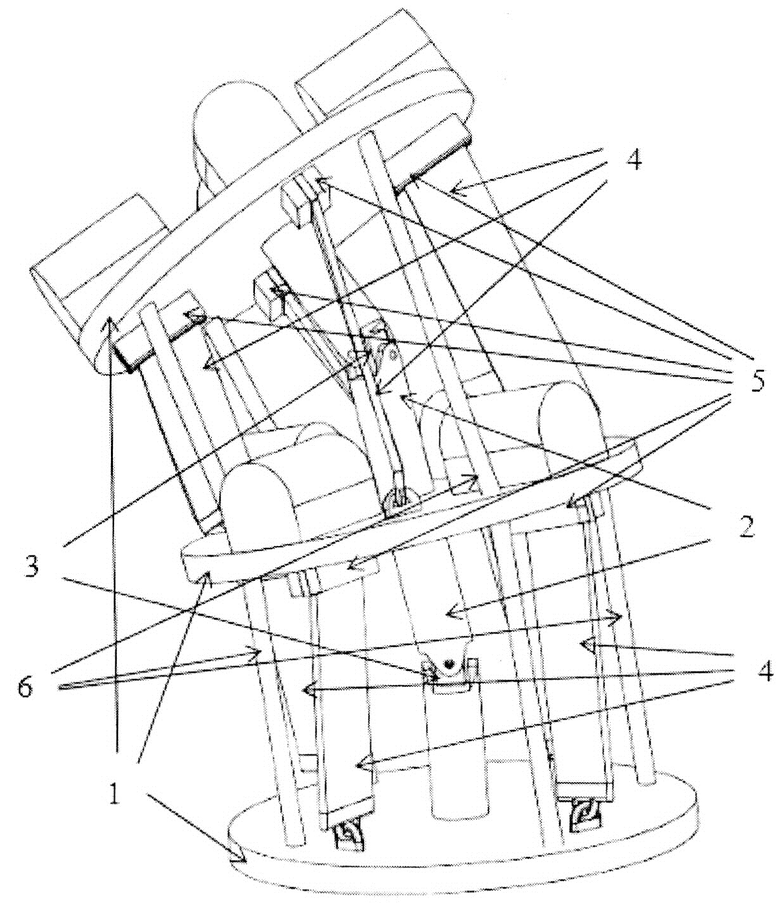
Манипулятор гибкий, содержащий секции с основаниями, соединенными центральной осью и гибкими предварительно напряженными связями, отличающийся тем, что он снабжен управляющими тросами, натянутыми вдоль манипулятора, а ось каждой секции снабжена карданом, при этом гибкие связи выполнены в виде лент, один конец которых шарнирно связан с основанием секции, а другой - закреплен на основании секции посредством фиксаторов.
| Кассета для бутыломоечных машин с цепным конвейером | 1956 |
|
SU107090A1 |
| РОБОТОТЕХНИЧЕСКАЯ СИСТЕМА | 2013 |
|
RU2535837C2 |
| Исполнительное устройство промышленного робота | 1985 |
|
SU1301701A1 |
| US 4393728 A1, 19.07.1983 | |||
| Устройство для подачи оправки трубопрокатного стана | 1986 |
|
SU1395398A1 |

