Изобретение относится к сельскому хозяйству, в частности к сельскохозяйственным беспилотным летательным аппаратам для определения электропроводности почвы.
Известен способ определения удельной электропроводности почвы, заключающийся в том, что электропроводность почвы определяют непосредственно в почвенном образце без использования водной вытяжки, для чего из почвенного образца готовят почвенную пробу путем его высушивания до воздушно-сухого состояния, полученную пробу измельчают и просеивают через сито с диаметром ячеек 2 мм, затем часть почвенной пробы помещают в кювету кондуктометрического прибора, изготовленную из диэлектрической пластмассы, причем масса почвенной пробы равна объему кюветы, далее пробу в кювете увлажняют до влажности, равной 30% и соответствующей наименьшей влагоемкости, размещают в почвенной пробе по торцам кюветы два электрода, равных по площади торцевым сторонам этой кюветы, и подсоединяют их к клеммам кондуктометрического прибора для измерения электропроводности почвы, а удельную электропроводность рассчитывают путем деления показателя электропроводности на объем почвенной пробы (патент RU 2331070, МПК G01N 33/24, 2008 ).
Недостатком известного способа является то, что для определения электропроводности почвы необходимо отобрать почвенный образец и переправить его в агрохимическую лабораторию для изготовления почвенной пробы, а это требует значительных затрат времени и ручного труда.
Для отбора проб почвы известен беспилотный летательный аппарат (БЛА), содержащий основной корпус, множество пропеллеров, прикрепленных к основному корпусу, бурободобный коллектор, расположенный от основного корпуса по направлению к земле для сбора почвы, приводное устройство для приведение в движение буроподобного коллектора (Патент КР № 10-1845395, 29.03.2018).
Известен метод и устройство для вертикального электрического зондирования грунта с двумя питающими крайними электродами A и B с расстоянием между ними AB и двумя центральными приемными электродам M и N с расстоянием между ними MN внедренными в землю, размещенными симметрично относительно общего центра O c разносом питающей линии AB/2 и измеряющие разности потенциалов между приемными (измерительными) электродами, вследствие прохождения тока через питающие электроды и с дальнейшим расчетом удельного кажущего электрического сопротивления (Поздняков А.И. Полевая электрофизика почв. М.: МАИК "Наука/Интерпериодика", 2001, Марченко Н.М. Вертикальное электрическое зондирование. М.: Издательство Московского университета. 2013, Позднякова А. Д., Поздняков Л. А., Анциферова О. Н. Универсальный прибор для измерений электрических свойств почв // Бюллетень науки и практики. 2018. Т. 4. №4).
Недостатком известного устройства является низкая производительность выполнения операции по определению электропроводности почвы.
Известно устройство для геоэлектрического профилирования почвенно-мерзлотного комплекса, почв, грунтов и иных минеральных образований содержащее корпус, батарею, блок памяти, средство записи электрических данных, средство обработки электрических сигналов в набор данных, выходы для питающих и измеряющих электродов в корпусе, электрические провода, соединяющие питающие и измеряющие электроды со средством записи электрических данных, при этом к корпусу устройства между отверстиями, выводящими питающие электроды, посредством пластикового профиля с электрическими проводами с помощью резьбовых соединений прикреплена пластиковая панель с размещенными на ней перфорированными отверстиями на расстоянии 10 см друг от друга с фиксаторами электродов (патент RU 2649030, МПК G01V 3/02, 2018).
Недостатком известного устройства является его низкая производительность и оперативность измерения динамики электрической активности почв при обследовании больших площадей сельскохозяйственных угодий в системе точного земледелия.
Известен беспилотный летательный аппарат (БЛА), содержащий основной корпус, множество пропеллеров, прикрепленных к основному корпусу, расположенный от основного корпуса по направлению к земле бур для сбора почвы, приводное устройство для приведение в движение бура (Патент КР № 10-1845395, 29.03.2018).
Недостатком известного устройства является то, что оно предназначено для отбора проб почвы с дальнейшим анализом почвенного образца на определение электропроводности.
Технической задачей изобретение является повышение производительности и качества выполнения технологического процесса измерения электропроводности почвы в системе точного земледелия.
Поставленная техническая задача достигается тем, что у беспилотного летательного аппарата для определения электропроводности, содержащем корпус, радиальные кронштейны, двигатели, винты, систему электроснабжения, посадочное шасси, бортовую систему автоматического управления пилотированием, навигацией и полезной нагрузкой с полетным контроллером и центральным процессором, связанным с модулем программного обеспечения управления полетом и модулем программного обеспечения управления работой технологического модуля, интегрированную навигационную систему, технологический модуль полезной нагрузки с линейным сервоприводом, согласно изобретению на конце вертикального штока линейного сервопривода перпендикулярно к вертикальной оси симметрии беспилотного летательного аппарата установлена горизонтальная пространственная штанга с закрепленными на ней симметрично относительно вертикальной оси беспилотного летательного аппарата горизонтальными и вертикальными центральными линейными актуаторами со штоками, выполненными в виде приемных электродов, а на концах штоков горизонтальных линейных актуаторов закреплены вертикальные линейные актуаторы, причем штоки крайних линейных актуаторов выполнены в виде питающих электродов, а штоки центральных линейных актуаторов выполнены в виде приемных электродов и все электроды подключенных к системе электроснабжения через блок управления технологического модуля, при этом каждый из контроллеров каждого линейного актуатора комплексирован с процессором контроллера беспилотного летательного аппарата.
Изобретение поясняется чертежами.
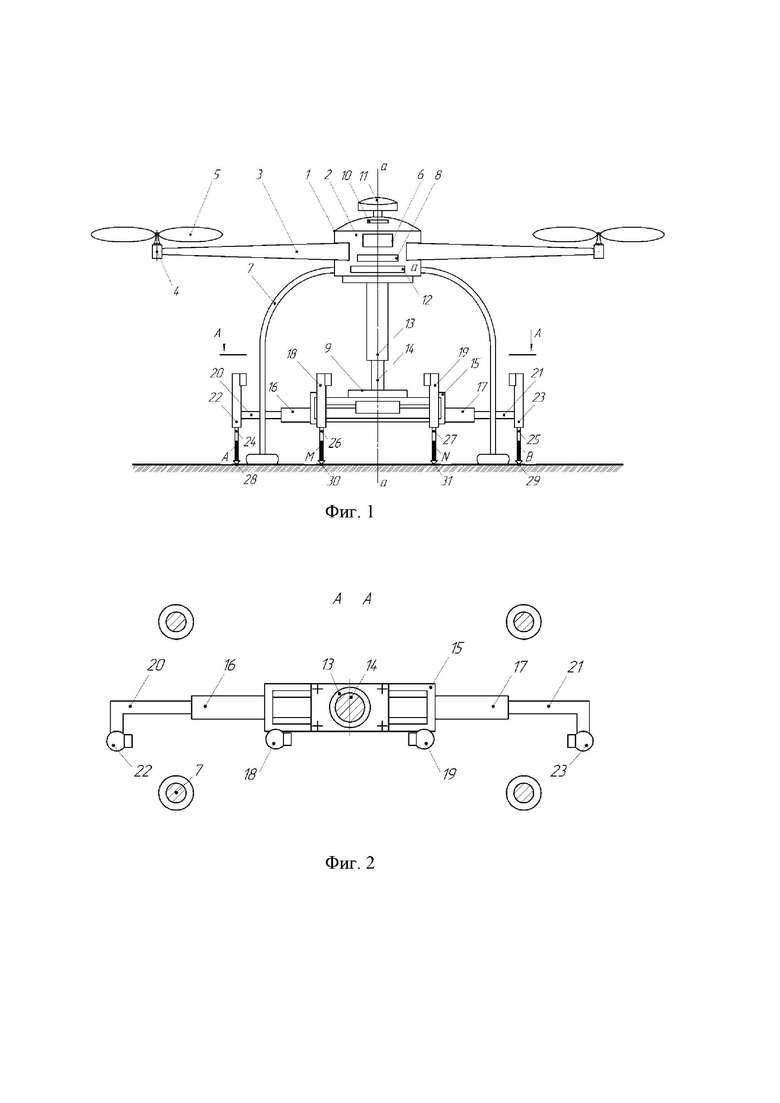
На фиг.1 представлен беспилотный летательный аппарат для определения электропроводности почвы, вид спереди; на фиг.2 технологический модуль полезной нагрузки.
Беспилотный летательный аппарат 1 (БЛА1) для определения электропроводности почвы содержит корпус 2, соединенные с ним радиальные кронштейны 3, двигатели 4, винты 5, систему электроснабжения с аккумулятором 6, посадочное шасси 7, бортовую систему автоматического управления 8 пилотированием, навигацией и полезной нагрузкой, технологический модуль 9 полезной нагрузки, прикрепленный к корпусу 2 посредством платформы 10.
Система автоматического управления 8 содержит полетный контроллер с процессором и датчиками ускорений, угловой скорости, магнитометрическим, барометрическим, измерения высоты полета, внешней среды и связанным с модулем программного обеспечения управления полетом БЛА1 и модулем программного обеспечения управления работой технологического модуля 9 полезной нагрузки, интегрированную навигационную систему, включающую модуль инерциальной навигационной системы, объединенный с модулем спутниковой навигационной системы в виде приемника ГЛОНАСС 9 (не показано) с антенной 11. Полетный контроллер комплексирован с блоками автоматического управления исполнительными механизмами двигателей 4, блоком 12 управления работой технологического модуля 9 полезной нагрузки.
Технологический модуль 9 полезной нагрузки содержит линейный сервопривод 13, закрепленный в нижней части БЛА1 по вертикальной оси симметрии а-а, работающий в режиме линейного актуатора с интегрированным контроллером линейного перемещения штока 14. На конце вертикального штока 14 линейного сервопривода 13 перпендикулярно к оси симметрии а-а БЛА1 установлена горизонтальная пространственная штанга 15. На штанге 15 закреплены симметрично оси а-а горизонтальные линейные актуаторы 16, 17 и вертикальные центральные линейные актуаторы 18, 19. На концах штоков 20, 21 горизонтальных актуаторов 16, 17 закреплены крайние вертикальные линейные актуаторы 22, 23. Все актуаторы выполнены с встроенными контроллерами (не показано) для управления и синхронной работы актуаторов 16,17, 18, 19, 22, 23. Штоки 24, 25 актуаторов 22, 23 выполнены в виде питающих электродов A и B, штоки 26, 27 актуаторов 18, 19 выполнены в виде приемных M и N электродов. Штоки 24, 25, 26, 27 имеют заостренные свободные концы 28, 29, 30, 31 и соединены другими концами с ходовыми винтами (не показано) соответствующих актуаторов 18,19, 22, 23. Ходовые винты актуаторов 18,19, 22, 23 изготовлены из диэлектрического материала.
К питающим электродам A и B подключен источник тока (не показано) системы электроснабжения БЛА 1 через блок управления 12 полезной нагрузкой 9 с измерением силы тока электронным амперметром, включенным в цепь АВ питающих электродов A и B. Электроды M и N подключены к электронному вольтметру системы электроснабжения БЛА 1 через блок управления 12 полезной нагрузкой. Контроллеры актуаторов 16,17, 18, 19, 22, 23 и контроллер линейного перемещения штока 14 сервопривода 13 комплексированы с процессором контроллера БЛА 1.
Установка на конце вертикального штока 14 линейного сервопривода 13 перпендикулярно к вертикальной оси симметрии а-а БЛА1 горизонтальной пространственная штанги 15 с закрепленными на ней симметрично относительно вертикальной оси а-а БЛА1 горизонтальными 16,17 и центральными вертикальными линейными актуаторами18,19 со штоками 26, 27, выполненными в виде приемных электродов M и N и закрепленными на концах штоков 20,21 горизонтальных линейных актуаторов 16,17 вертикальных линейных актуаторов 22, 23 с штоками 24, 25, выполненных в виде питающих электродов A и B, позволяет в автоматическом режиме регулировать процессе зондирования почвы, увеличивать расстояние AB между электродами A и B при постоянном межэлектродном расстоянии MN приемных электродов M и N, что обеспечивает дифференцированное измерение электропроводности почвы по глубине пахотного слоя. Подключение всех электродов к системе электроснабжения через блок управления 12 технологического модуля 9 и комплексирование каждый из контроллеров каждого линейного актуатора 16, 17, 18, 19, 22, 23 с процессором контроллера беспилотного летательного аппарата 1 позволяет адекватно управлять технологическим модулем 9 режиме реального времени.
Беспилотный летательный аппарат для определения электропроводности почвы работает следующим образом.
В процессор полетного контроллера БЛА1 загружают полетное задание, в котором отображают в электронном виде параметры маршрута полета и электронную карту-задание, являющиеся программой определения точек определения электропроводности почвы на сельскохозяйственном поле. Для обработки устанавливают границы и площадь поля, длину гона, координаты точек определения электропроводности почвы, координаты начальной точки и координаты точки окончания определения электропроводности, рабочую скорость и высоту полета, наименьшую рабочую траекторию полета, координаты посадочной площадки для замены или подзарядки аккумуляторной батареи.
От контроллера БЛА1 сигнал передаётся в блок системы автоматического управления полетом, запускаются двигатели 4, производится раскрутка несущих винтов 5 и двигатели 4 переводятся во взлетный режим. Производится вертикальный взлет БЛА 1. БЛА 1 в соответствии с программой полета, подлетает к точке стартовых координат рабочей траектории полета, при этом координаты, определяемые интегрированной навигационной системой, сравниваются с заданными координатами, введенными в программу траекторного полета.
При подлете БЛА 1 к заданной точке определения электропроводности БЛА 1 зависает и осуществляет посадку на грунт. Блок управления 12 передает управляющие сигналы на контроллеры горизонтальных актуаторов 16, 17, которые преобразуют сигналы управления актуаторами 16, 17, определяют требуемую длину выдвижения штоков 20,21 с вертикальными актуаторами 22, 23 с заданными полуразносами электродов AB/2 в соответствии с электронной картой-заданием. Одновременно блок 12 передает управляющие сигналы на контроллеры вертикальных актуаторов 18, 19, 22, 23, штоки которых выдвигаются на длину равную заданной глубине погружения электродов A, B, M, N в почву сельскохозяйственного поля в соответствии с электронной картой-заданием.
Блок управления 12 передает сигнал на контроллер линейного сервопривода 13, который включается в работу, шток 13 выдвигается с одновременным погружение электродов A, B, M, N в почву. К электродам A, B подается ток. С электродов MN снимается информация об электрических параметрах почвы в виде разности потенциалов на электродах, которые передаются в блок 12 и далее в центральным процессор бортовой системы автоматического управления 8. Далее включается сервопривод 13 и шток 14 поднимается и выводит электроды A, B, M, N из почвы. БЛА 1 перелетает по заданной траектории к заданной точке определения влажности почвы, находящейся на рабочей траектории полета БЛА1.
Применение беспилотного летательного аппарата обеспечивает определение электропроводности почвы как по глубине корневой системы растений, так и по площади корневого питания растений, позволит повысить производительность и качество технологического процесса определения электропроводности почвы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Беспилотный летательный аппарат для определения твердости почвы | 2024 |
|
RU2828501C1 |
| Беспилотный летательный аппарат для определения содержания питательных веществ растений в почве | 2024 |
|
RU2827242C1 |
| Беспилотный летательный аппарат для определения влажности почвы | 2024 |
|
RU2827261C1 |
| Беспилотный летательный аппарат для отбора почвенных образцов | 2024 |
|
RU2828894C1 |
| Беспилотный летательный аппарат для определения pH почвы | 2024 |
|
RU2829672C1 |
| Беспилотный летательный аппарат для обработки пестицидами садовых деревьев и кустарников | 2023 |
|
RU2808292C1 |
| Беспилотный летательный аппарат для внесения пестицидов в точном садоводстве | 2023 |
|
RU2793020C1 |
| Беспилотный летательный аппарат для внесения пестицидов в промышленном садоводстве и питомниководстве | 2023 |
|
RU2811604C1 |
| Беспилотный летательный аппарат для обработки пестицидами пропашных культур | 2023 |
|
RU2808295C1 |
| Беспилотный летательный аппарат для внесения пестицидов в промышленном садоводстве и питомниководстве | 2023 |
|
RU2808008C1 |
Беспилотный летательный аппарат для определения электропроводности почвы содержит корпус, радиальные кронштейны, двигатели, винты, систему электроснабжения, посадочное шасси, бортовую систему автоматического управления пилотированием, навигацией и полезной нагрузкой с полетным контроллером и центральным процессором, связанным с модулем программного обеспечения управления полетом и модулем программного обеспечения управления работой технологического модуля, интегрированную навигационную систему, технологический модуль полезной нагрузки с линейным сервоприводом. Технологический модуль содержит горизонтальную штангу с закрепленными на ней определенным образом линейными актуаторами со штоками, выполненными в виде электродов, подключенных к системе электроснабжения через блок управления работой технологического модуля, при этом крайние из электродов являются питающими, а центральные – приемными. Обеспечивается повышение производительности и качества выполнения технологического процесса измерения электропроводности почвы. 2 ил.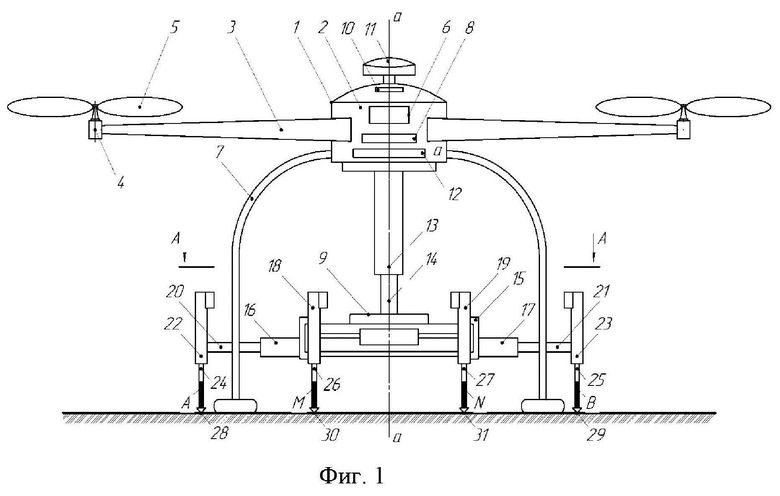
Беспилотный летательный аппарат для определения электропроводности почвы, содержащий корпус, радиальные кронштейны, двигатели, винты, систему электроснабжения, посадочное шасси, бортовую систему автоматического управления пилотированием, навигацией и полезной нагрузкой с полетным контроллером и центральным процессором, связанным с модулем программного обеспечения управления полетом и модулем программного обеспечения управления работой технологического модуля, интегрированную навигационную систему, технологический модуль полезной нагрузки с линейным сервоприводом, отличающийся тем, что на конце вертикального штока линейного сервопривода перпендикулярно вертикальной оси симметрии беспилотного летательного аппарата установлена горизонтальная пространственная штанга с закрепленными на ней симметрично относительно вертикальной оси беспилотного летательного аппарата горизонтальными и вертикальными центральными линейными актуаторами со штоками, выполненными в виде приемных электродов, а на концах штоков горизонтальных линейных актуаторов закреплены вертикальные линейные актуаторы, причем штоки крайних линейных актуаторов выполнены в виде питающих электродов, а штоки центральных линейных актуаторов выполнены в виде приемных электродов, и все электроды подключены к системе электроснабжения через блок управления работой технологического модуля, при этом каждый из контроллеров каждого линейного актуатора комплексирован с процессором контроллера беспилотного летательного аппарата.
| БОРТОВАЯ ЭЛЕКТРОМАГНИТНАЯ СИСТЕМА ПЕТЛИ ПЕРЕДАТЧИКА | 2009 |
|
RU2494420C2 |
| УСТРОЙСТВО ДЛЯ ВНУТРИПОЧВЕННОГО ИЗМЕРЕНИЯ АГРОТЕХНОЛОГИЧЕСКИХ ХАРАКТЕРИСТИК ПАХОТНОГО СЛОЯ ПОЧВЫ В ДВИЖЕНИИ | 2013 |
|
RU2537908C2 |
| Устройство для снятия со стенок реторт вакуумных печей давления | 1957 |
|
SU114166A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЭЛЕКТРОПРОВОДНОСТИ ГРУНТОВ | 1992 |
|
RU2044308C1 |
| US 20220237912 A1, 28.07.2022. | |||

