Изобретение относится к сельскому хозяйству, в частности к сельскохозяйственным беспилотным летательным аппаратам с интегрированной автоматизированной системой определения влажности почвы по глубине корневой системы агроценозов.
Известно устройство для определения влажности почвы, содержащее датчик влажности и блок управления, соединенные между собой кабелем через штепсельные разъемы. Датчик влажности состоит из заостренного конусного наконечника, закрепленного на полой трубке, на которой с помощью изоляционных колец на определенном расстоянии друг от друга располагаются два кольцевых электрода, другой конец трубки крепится с помощью переходника к основной трубе, оканчивающейся рукоятками и штепсельным разъемом. Блок управления включает регистрирующий блок с тумблером приведение в действие устройства, две печатные платы (управляемого мультивибратора и частотомера) и источники питания. Кольцевые электроды подсоединяются к штепсельному разъему и далее через кабель подсоединяются к управляющему входу мультивибратора, выход которого подсоединяется ко входу частотомера, а выход частотомера подсоединяется ко входу цифрового мультиметра, проградуированного в значениях влажности почвы (Патент RU №185072, МПК G01N 33/24, G01N 27/22, 2018).
Недостатком известного устройства является то, что для измерения влажности почвы по горизонтам формирования корневой системы растений на больших площадях требует значительных затраты времени и ручного труда, поскольку для программирования продуктивности агроценозов необходимы значения запасов влаги, не менее чем в однометровом слое почвы.
Известен беспилотный летательный аппарат (БЛА) для отбора проб почвы, содержащий основной корпус, двигатели, пропеллеры, посадочное шасси, бортовую систему автоматического управления пилотированием, навигацией и полезной нагрузкой, модуль дистанционной передачи изображения исследуемого грунта, прикрепленный к основному корпусу технологический модуль, включающий линейный сервопривод, конический бур, электродвигатель для приведение в движение бура (Патент КР № 10-1845395,29.03.2018).
Недостатком известного устройства является то, что для определения влажности почвы по горизонтам бур с образцами почвы необходимо периодический вынимать из скважины и почву пересыпать алюминиевые бюксы для дальнейшего измерения влажности термостатно-весовым методом в лабораторных условиях, что требует больших затрат времени и ручного труда.
Изобретение поясняется чертежами.
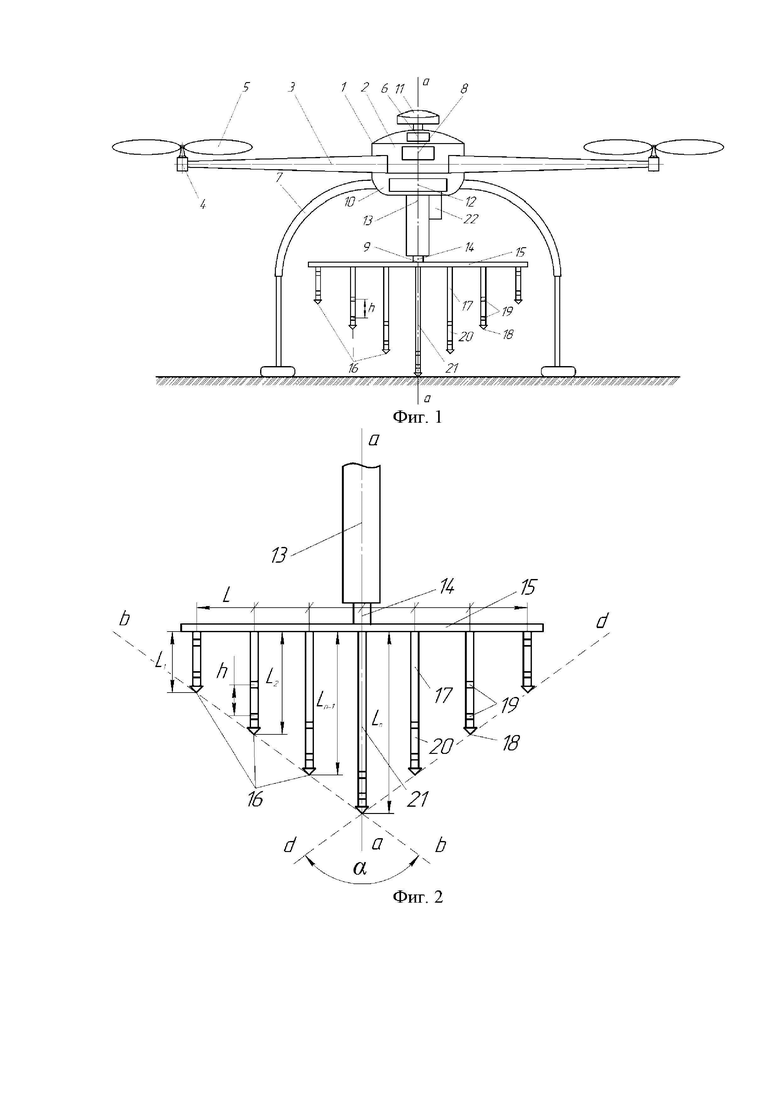
На фиг. 1 изображен беспилотный летательный аппарат для определения влажности почвы, вид спереди; на фиг. 2 показана схема размещения датчиков влажности почвы.
Технической задачей изобретения, является одновременное определение параметров влажности почвы по всей глубине корневой системы растений, получение полной информации о количестве влаги в зоне корневой системы растений, повышение производительности и качества выполнения технологического процесса определения влажности почвы.
Поставленная техническая задача достигается тем, что в беспилотном летательном аппаратедля определения влажности почвы содержащем корпус, радиальные кронштейны, двигатели, винты, аккумулятор, посадочное шасси, бортовую систему автоматического управления пилотированием, навигацией и полезной нагрузкой с полетным контроллером и центральным процессором, связанным с модулем программного обеспечения управления полетом и модулем программного обеспечения управления работой технологического модуля, интегрированную навигационную систему, технологический модуль определения влажности почвы с линейным сервоприводом с интегрированным датчиком линейного перемещения штока, датчиками влажности, подвешенный к корпусу посредством кронштейна, согласно изобретению на конце вертикального штока линейного сервопривода перпендикулярно к вертикальной оси симметрии беспилотного летательного аппарата установлена горизонтальная штанга с закрепленными на равных расстояниях друг от друга датчиками влажности, установленными симметрично по обе стороны относительно центрального датчика, который установленсоосно с вертикальной осьюсимметрии беспилотного летательного аппарата, при этом условные прямые линии, проходящие через концы конусных наконечников и пересекающиеся на конце конусного наконечника центрального датчика образуют угол меньше 180°, идлина каждого датчика равна заданной глубине корнеобитаемой зоны растений,причем расстояние между кольцевыми электродами на каждом из датчиков равны между собой и не превышают глубины каждого слоя почвы, а электроды соединены электролинией линией связи с блоком управления технологического модуля , который в свою очередь соединен с контроллером технологического модуля, комплексированным с центральным процессором полетного контроллера бортовой системы автоматического управления полетом беспилотного летательного аппарата.
Беспилотный летательный аппарат 1 для определения влажности почвы содержит корпус 2, радиальные кронштейны 3, двигатели 4, винты 5, аккумулятор 6, посадочное шасси 7, бортовую систему автоматического управления 8 пилотированием, навигацией и полезной нагрузкой, технологический модуль 9 определения влажности почвы, подвешенный к корпусу 2 посредством кронштейна 10. Бортовая система автоматического управления 8 содержит полетный контроллер с центральным процессором, связанным с модулем программного обеспечения управления полетом БЛА 1 и модулем программного обеспечения управления работой технологического модуля 9, комплексированную с процессором контроллера, интегрированную навигационную систему, включающую модуль инерциальной навигационной системы, объединенный с модулем спутниковой навигационной системы в виде приемника ГЛОНАСС (не показано) с антенной 11. Полетный контроллер комплексирован с блоками автоматического управления исполнительными механизмами двигателей 4, блоком 12 управления работой технологического модуля 9, с модулями датчиков внешней среды и измерения высоты полета (не показано).
Линейный сервопривод 13, работающий в режиме линейного актуатора с интегрированным датчиком линейного перемещения штока 14, установлен по вертикальной оси симметрии а-а БЛА1. На конце вертикального штока 14 линейного сервопривода 13 перпендикулярно к оси а-а закреплена горизонтальная штанга 15. На штанге 15 закреплены на равных расстояниях l друг от друга датчики влажности 16, выполненные в виде вертикальных полых штоков 17 с длиной L1, L2, ...Ln-1, Ln с конусными наконечниками 18 и с кольцевыми электродами 19 изолированными друг от друга диэлектрическими втулками 20. Датчики влажности 16 установлены симметрично по обе стороны относительно центрального датчика 21, который установленсоосно с вертикальной осьюсимметрииа-а БЛА 1. Длина L1, L2, ...Ln-1, Ln каждого датчика 16 равна заданной глубине корнеобитаемой зоны растений. При этом расстояние h между кольцевыми электродами 19 на каждом из датчиков 16, 17 равны между собой и не превышают глубины каждого слоя почвы. Датчики 16 при прочих равных условиях установлены таким образом, что условные прямые линии b-b и d-d проходящие через концы конусных наконечников18 и пересекающиеся на конце конусного наконечника центрального датчика 21 образуют угол α меньше 180°. Электроды 19 соединены электролинией линией связи (не показано) с блоком управления 12 работой технологического модуля 9, который в свою очередь соединен с контроллером 22 технологического модуля 9 комплексированным с полетным контроллером бортовой системы автоматического управления полетом беспилотного летательного аппарата.
Установка на конце вертикального штока 14 линейного сервопривода 13 перпендикулярно к вертикальной оси симметрии a-a БЛА 1 горизонтальной штанги 15 с закрепленными на равных расстояниях друг от друга датчиками влажности 16, размещенными симметрично по обе стороны относительно центрального датчика 21, который установлен соосно с вертикальной осью симметрии a-a БЛА1 значительно увеличивает зону оценки влажности почвы по сравнению с измерением влажности одиночным датчиком, повышает точность измерения влажности почвы с одной стороны, с другой стороны обеспечивает равномерное распределения нагрузки на горизонтальную штангу 15 и, как следствие, на БЛА1.
Установка датчиков 16 при прочих равных условиях таким образом, что условные прямые линии b-b и d-d, проходящие через концы конусных наконечников18 и пересекающиеся на конце конусного наконечника центрального датчика 21 образуют угол α меньше 180° обеспечивает дифференциацию глубины определения влажности.
Выполнение каждого датчика 16, 21 с длиной равной заданной глубине корнеобитаемой зоны растений с равным расстоянием h между кольцевыми электродами 19 на каждом из датчиков 16, 21, не превышающим глубины каждого слоя почвы, позволяет дифференцированно по глубине определять влажность почвы.
Соединение электродов 19 электролинией линией связи с блоком управления технологического модуля 12, который в свою очередь соединен с контроллером 22 технологического модуля 9, комплексированным c центральны процессором полетного контроллера бортовой системы автоматического управления полетом БЛА1 позволяет фиксировать, получать, обрабатывать и хранить информацию в режиме on-line.
Работает беспилотный летательный аппарат для определения влажности почвы следующим образом.
В процессор полетного контроллера БЛА 1 загружают полетное задание, в котором отображают в электронном виде параметры маршрута полета и электронную карту-задание, являющиеся программой определения влажности почвы на сельскохозяйственном поле. Для обработки устанавливают границы площадь поля, длину гона, координаты точек определения влажности почвы, координаты начальной точки и координаты точки окончания определения влажности, рабочую скорость и высоту полета, наименьшую рабочую траекторию полета, координаты посадочной площадки для замены аккумуляторной батареи.
От контроллера сигнал передаётся в блок системы автоматического управления полетом, запускаются двигатели 4, производится раскрутка несущих винтов 5 и двигатели 4 переводятся во взлетный режим. Производится вертикальный взлет БЛА 1. БЛА 1 в соответствии с программой полета, подлетает к точке стартовых координат рабочей траектории полета, при этом координаты, определяемые интегрированной навигационной системой, сравниваются с заданными координатами, введенными в программу траекторного полета.
Модуль датчиков внешней среды передает информацию в процессор контроллера о параметрах внешней среды (скорости и направлении ветра, атмосферном давлении, температуре и влажности воздуха). Модуль измерения высоты полета передает на процессор контроллера текущее значение высоты полета БЛА 1.
При подлете БЛА 1 к заданной точке отбора пробы БЛА 1 зависает и осуществляет посадку на грунт. Блок управления 12 передает управляющие сигналы на контроллер 22 линейного сервопривода 13, который преобразует сигналы управления сервоприводом 13, определяет требуемую длину выдвижения штока 14 со штангой 15. Включается сервопривод 13 и шток 14 начинает выдвигаться с заглублением датчиков 16 и датчика 21 в почву. С каждого датчиков 16 и датчика 21 снимается информация о параметрах влажности почвы, которые передаются в блок 12 и далее в центральным процессор бортовой системы автоматического управления 8. Далее включается сервопривод 13 и шток 14 поднимается ивыводит датчики16 и 21из почвы. БЛА 1 перелетает по заданной траектории к заданной точке определения влажности почвы, находящейся на рабочей траектории полета БЛА1.
Применение беспилотного летательного аппарата обеспечит определение влажности почвы по всей глубине корневой системы растений, повышение производительности и качества технологического процесса определения влажности почвы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Беспилотный летательный аппарат для определения pH почвы | 2024 |
|
RU2829672C1 |
| Беспилотный летательный аппарат для определения электропроводности почвы | 2024 |
|
RU2829829C1 |
| Беспилотный летательный аппарат для определения твердости почвы | 2024 |
|
RU2828501C1 |
| Беспилотный летательный аппарат для отбора почвенных образцов | 2024 |
|
RU2828894C1 |
| Беспилотный летательный аппарат для определения содержания питательных веществ растений в почве | 2024 |
|
RU2827242C1 |
| Беспилотный летательный аппарат для обработки пестицидами садовых деревьев и кустарников | 2023 |
|
RU2808292C1 |
| Беспилотный летательный аппарат для внесения пестицидов в точном садоводстве | 2023 |
|
RU2793020C1 |
| Беспилотный летательный аппарат для внесения пестицидов в промышленном садоводстве и питомниководстве | 2023 |
|
RU2811604C1 |
| Беспилотный летательный аппарат для внесения пестицидов в промышленном садоводстве и питомниководстве | 2023 |
|
RU2808008C1 |
| Беспилотный летательный аппарат для обработки пестицидами пропашных культур | 2023 |
|
RU2808295C1 |
Беспилотный летательный аппарат для определения влажности почвы содержит корпус, радиальные кронштейны, двигатели, винты, аккумулятор, посадочное шасси, технологический модуль определения влажности почвы, бортовую систему автоматического управления пилотированием, навигацией и полезной нагрузкой с полетным контроллером и центральным процессором, связанным с модулем программного обеспечения управления полетом и модулем программного обеспечения управления работой технологического модуля. Технологический модуль закреплен к корпусу беспилотного летательного аппарата посредством кронштейна и содержит шток, перемещаемый линейным сервоприводом с интегрированным датчиком перемещения штока, при этом на конце штока установлена горизонтальная штанга с установленными на ней определенным образом датчиками влажности. Обеспечивается повышение производительности и качества выполнения технологического процесса определения влажности почвы. 2 ил.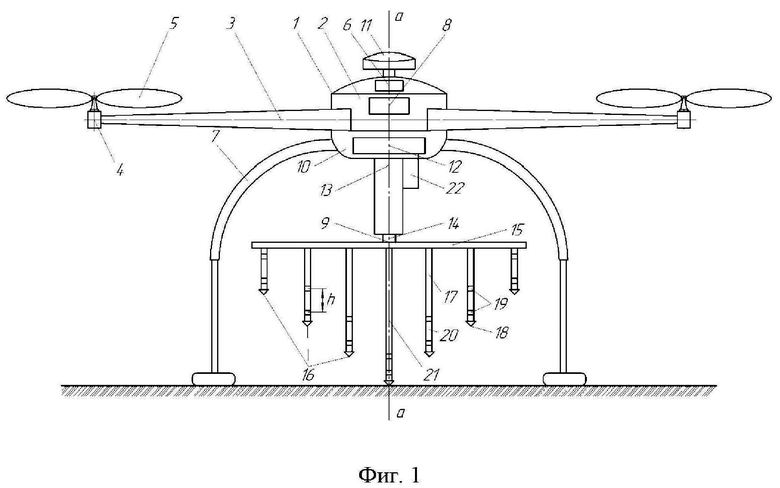
Беспилотный летательный аппарат для определения влажности почвы, содержащий корпус, радиальные кронштейны, двигатели, винты, аккумулятор, посадочное шасси, бортовую систему автоматического управления пилотированием, навигацией и полезной нагрузкой с полетным контроллером и центральным процессором, связанным с модулем программного обеспечения управления полетом и модулем программного обеспечения управления работой технологического модуля, интегрированную навигационную систему, технологический модуль определения влажности почвы с линейным сервоприводом с интегрированным датчиком линейного перемещения штока, датчиками влажности, подвешенный к корпусу посредством кронштейна, отличающийся тем, что на конце вертикального штока линейного сервопривода перпендикулярно к вертикальной оси симметрии беспилотного летательного аппарата установлена горизонтальная штанга с закрепленными на равных расстояниях друг от друга датчиками влажности, установленными симметрично по обе стороны относительно центрального датчика, который установлен соосно с вертикальной осью симметрии беспилотного летательного аппарата, при этом условные прямые линии, проходящие через концы конусных наконечников и пересекающиеся на конце конусного наконечника центрального датчика, образуют угол меньше 180°, и длина каждого датчика равна заданной глубине корнеобитаемой зоны растений, причем расстояние между кольцевыми электродами на каждом из датчиков равны между собой и не превышают глубины каждого слоя почвы, а электроды соединены электролинией линией связи с блоком управления технологического модуля, который в свою очередь соединен с контроллером технологического модуля, комплексированным с центральным процессором полетного контроллера бортовой системы автоматического управления полетом беспилотного летательного аппарата.
| Способ дистанционного отбора проб грунта, снега с использованием беспилотного летательного аппарата коптерного типа | 2021 |
|
RU2758808C1 |
| ПЫЛЕОТДЕЛИТЕЛЬ | 0 |
|
SU210641A1 |
| БЕСПИЛОТНЫЙ КОМПЛЕКС ХИМИЧЕСКОЙ РАЗВЕДКИ ГРУНТА | 2020 |
|
RU2766308C1 |
| ДИСТАНЦИОННЫЙ РАДИОФИЗИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ ВЛАЖНОСТИ ПОЧВЫ | 2006 |
|
RU2348924C2 |
| US 20200225207 A1, 16.07.2020. | |||

