Изобретение относится к сельскому хозяйству, в частности к сельскохозяйственным беспилотным летательным аппаратам для определения водородного показателя почвы (pH), отражающего кислотно-щелочной баланс почвы и одновременно определение влажности и температуры почвы в системе точного земледелия.
Известно устройство для определения pH почвы, состоящее из измерительной ячейки, усилителя, вычислителя, аналого-цифрового преобразователя, коммутатора, связывающего выход измерительной ячейки со входом усилителя, выход которого через аналого-цифровой преобразователь по шине данных соединен с вычислителем, который по шине управления соединен с управляющим входом коммутатора, дополнительно содержит приемо-передающее устройство и источник питания, а вычислитель выполнен на базе микроконтроллера, при этом приемопередающее устройство имеет возможность соединения с микроконтроллером, который соединен с аналого-цифровым преобразователем, коммутатором и источником питания (патент RU 134654, G01N 27/00, 2013).
Недостатком известного устройства, является его стационарность, отображающая спящий режим работы с переводом в рабочий режим по сигналу, поступающему на приемо-передающее устройство, что предопределяет наличие по крайней мере одного устройства на каждом элементарном участке сельскохозяйственного поля в системе точного земледелии и множество данных устройств на всем поле, а это приводит к большим затратам на определения pH почвы, при этом измеряется только pH при наличии корреляционной связи кислотности и щелочности почвы с влажностью и температурой.
Известен детектор pH почвы для измерения кислотности или щелочности почвы, содержащий микрокомпьютер, дисплей с сенсорным экраном, металлический датчик - зонд, снабженный алюминиевым, цинковыми медным электродом, разделенные изоляторами, источник питания, накопитель, которые соединены с управляющей микросхемой, при этом схема коммутации, соединена со схемой усиления, а алюминиевый электрод соединен с коммутационной схемой и соответственно с медным электродом, цинковый электрод соединен с усилительной схемой (патент CN 205067417, 02.03.2006).
Недостатком известного устройства является фиксированная глубина погружения зонда, попеременное подключение электродов для pH и определения влажности почвы, отсутствие связи с GPS/ ГОНАСС, что затрудняет его использование в системе точного земледелия.
Известно сенсорное устройство для анализа почвы, содержащее узел датчика с двумя или большим количеством датчиков, которые сконфигурированы по отдельности или совокупно для измерения по меньшей мере двух из следующих свойств почвы, подлежащей анализу, и для предоставления соответствующих данных измерений: спектр импеданса, температура, спектр поглощения NIR-VIS-UV в спектральном диапазоне от NIR (ближняя инфракрасная область спектра) до UV (ультрафиолетовая область спектра), и кислотный или щелочной характер, в частности значение pH. В этом случае расстояние между, в каждом случае, двумя датчиками узла датчика, которое определяется по отношению к соответствующим датчикам измеряемой переменной величины, не превышает значение 10 см (патент RU 2759207, МПК G01N 21/31, G01N 27/22, G01N 33/24, 2021).
Недостатками известного устройства являются фиксированная глубина погружения зонда, преимущественно наземный способ перемещения устройства в виде ручного переноса его с одного обследуемого участка на другой , не представлена связь устройства управления датчиками с GPS/ ГОНАСС, что предопределяет невозможность проведения измерений в точках поля с одними и теми же координатами в течение всего полевого сезона, а это снижает производительность процесса анализа почвы.
Известен беспилотный летательный аппарат (БЛА) для отбора проб почвы, содержащий основной корпус, двигатели, пропеллеры, посадочное шасси, бортовую систему автоматического управления пилотированием, навигацией и полезной нагрузкой, модуль дистанционной передачи изображения исследуемого грунта, прикрепленный к основному корпусу технологический модуль, включающий линейный сервопривод, конический бур, электродвигатель для приведение в движение бура (патент КР № 10-1845395, 2018).
Недостатком известного устройства является то, что для определения значений показателей почвы по горизонтам бур с образцами почвы необходимо периодический вынимать из скважины и почву пересыпать алюминиевые бюксы для дальнейшего определения показателей почвы в лаборатории, а это требует значительных затрат времени, труда и средств.
Технической задачей изобретения является повышение производительности и качества выполнения технологического процесса определения установленных значений показателей почвы за счет одновременного определения значений показателей pH, влажности и температуры почвы по глубине и ширине корневой системы растений в режиме реального временив системе точного земледелия.
Поставленная техническая задача достигается тем, что в беспилотном летательном аппарате для определения pH почвы, содержащем корпус, радиальные кронштейны, двигатели, винты, аккумулятор, посадочное шасси, бортовую систему автоматического управления пилотированием, навигацией и полезной нагрузкой с полетным контроллером и центральным процессором, связанным с модулем программного обеспечения управления полетом и модулем программного обеспечения управления работой технологического модуля, интегрированную навигационную систему, технологический модуль определения показателей почвы с линейным сервоприводом и интегрированным датчиком линейного перемещения штока, измерительными зондами, подвешенный к корпусу посредством кронштейна, согласно изобретению, на конце вертикального штока линейного сервопривода перпендикулярно к вертикальной оси симметрии беспилотного летательного аппарата и соосно с этой осью закреплена горизонтальная платформа, на которой установлены, по крайней мере, три блока измерительных зондов с электродами на равных расстояниях между смежными электродами в ряду и между рядами электродов, причем совокупность длин электродов характеризуется арифметической прогрессией с разностью прогрессии равной длине наименьшего электрода, причем длина наибольшего электрода больше или равна глубине корнеобитаемой зоны растений, а рабочая ширина захвата платформы равна или больше диаметра корнеобитаемой зоны растений, при этом датчики связанны интерфейсом с контроллером технологического модуля, который соединен линией связи с блоком управления работой технологического модуля, комплексированным с полетным контроллером бортовой системы автоматического управления полетом беспилотного летательного аппарата.
Изобретение поясняется чертежами.
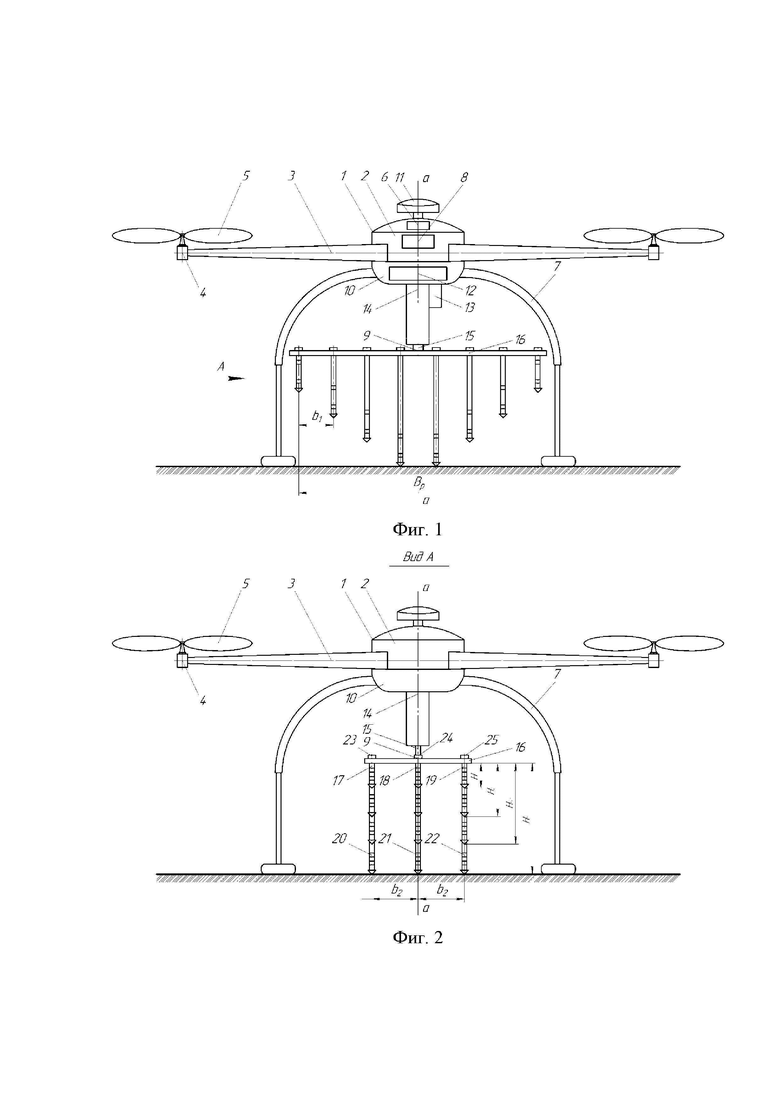
На фиг. 1 представлен беспилотный летательный аппарат, вид спереди; на фиг. 2 – то же, вид А.
Беспилотный летательный аппарат 1 для определения влажности почвы содержит корпус 2, радиальные кронштейны 3, двигатели 4, винты 5, аккумулятор 6, посадочное шасси 7, бортовую систему автоматического управления 8 пилотированием, навигацией и полезной нагрузкой, технологический модуль 9 определения pH, температуры и влажности почвы, подвешенный к корпусу 2 посредством кронштейна 10. Бортовая система автоматического управления 8 содержит полетный контроллер с центральным процессором, связанным с модулем программного обеспечения управления полетом БЛА 1 и модулем программного обеспечения управления работой технологического модуля 9, комплексированную с процессором контроллера, интегрированную навигационную систему, включающую модуль инерциальной навигационной системы, объединенный с модулем спутниковой навигационной системы в виде приемника ГЛОНАСС (не показано) с антенной 11. Полетный контроллер связан интерфейсом с блоками автоматического управления исполнительными механизмами двигателей 4, блоком 12 управления работой технологического модуля 9, с модулями датчиков внешней среды и измерения высоты полета (не показано).
Технологический модуль 9 содержит контроллер 13, линейный сервопривод 14, работающий в режиме линейного актуатора с интегрированным датчиком линейного перемещения штока 15 и установлен по вертикальной оси симметрии а-а БЛА1.На конце вертикального штока 15 линейного сервопривода 14 перпендикулярно к оси а-а и симметрично по оси а-а закреплена горизонтальная платформа 16. На платформе 16 установлены, по крайней мере, три блока измерительных зондов17, 18, 19 с электродами 20, 21, 22, соединенных с датчиками 23, 24, 25. Зонды 17, 18,19 установлены на равных расстояниях b1 между смежными электродами 20 и 21, 21 и 22 в ряду и между рядами b2 электродов 20, 21, 22 .Датчиками 23, 24, 25 содержат печатные электронные платы. Совокупность длин H1, H2,..., Hn-1,Hn электродов 20, 21, 22, характеризуется арифметической прогрессией H1, H1+d,H1+2d,...,H1+(n-1)d,H1+nd, где d- разность прогрессии, равная длине H1 наименьшего из электродов 20, 21, 22, а n представляет номер электрода и соответственно n-й член прогрессии. Длина Hn наибольшего электрода больше или равна глубине корнеобитаемой зоны растений, а рабочая ширина захвата Bр платформы 16 равна или больше диаметра (ширины) корнеобитаемой зоны растений.
Датчики 23, 24, 25 связанны интерфейсом с контроллером 13технологического модуля 9, который соединен линией связи (не показано) с блоком управления 12 работой технологического модуля 9, комплексированным с полетным контроллером бортовой системы автоматического управления полетом БЛА1.
Работает беспилотный летательный аппарат для определения влажности почвы следующим образом.
В процессор полетного контроллера БЛА 1 загружают полетное задание, в котором отображают в электронном виде параметры маршрута полета и электронную карту-задание, являющиеся программой определения pH, влажности и температуры почвы на каждом элементарном участке сельскохозяйственного поля. Для обработки устанавливают границы, площадь поля, длину гона, координаты точек определения установленных показателей почвы, координаты начальной точки и координаты точки окончания определения показателей на каждом элементарном участке поля, рабочую скорость и высоту полета, наименьшую рабочую траекторию полета, координаты посадочной площадки для замены аккумуляторной батареи.
От полетного контроллера сигнал передаётся в блок системы автоматического управления полетом, запускаются двигатели 4, производится раскрутка несущих винтов 5 и двигатели 4 переводятся во взлетный режим. Производится вертикальный взлет БЛА 1. БЛА 1 в соответствии с программой полета, подлетает к точке стартовых координат рабочей траектории полета, при этом координаты, определяемые интегрированной навигационной системой, сравниваются с заданными координатами, введенными в программу траекторного полета.
Модуль датчиков внешней среды передает информацию в процессор контроллера о параметрах внешней среды (скорости и направлении ветра, атмосферном давлении, температуре и влажности воздуха). Модуль измерения высоты полета передает на процессор контроллера текущее значение высоты полета БЛА 1.
При подлете БЛА 1 к заданной точке отбора пробы БЛА 1 зависает и осуществляет посадку на грунт. Блок управления 12 передает управляющие сигналы на контроллер 13 технологического модуля 9. Включается сервопривод 14 и шток 15 начинает выдвигаться с заглублением электродов 20, 21, 22 в почву. С каждого из датчиков 23, 24, 25 снимается информация о параметрах pH, влажности и температуры почвы, которые передаются в блок 12 и далее в центральным процессор бортовой системы автоматического управления 8. Далее включается сервопривод 14 и шток 15 поднимается и выводит электроды 20, 21, 22 почвы. БЛА 1 взлетает и перелетает по заданной траектории к заданным координатам элементарного участка сельскохозяйственного поля для определения показателей почвы.
Применение беспилотного летательного аппарата обеспечит повышение производительности и качества технологического процесса определения показателей почвы, определение значение показателей кислотности и щелочности, влажности и температуры почвы одновременно по всей глубине и ширине корневой системы растений.
| название | год | авторы | номер документа |
|---|---|---|---|
| Беспилотный летательный аппарат для определения влажности почвы | 2024 |
|
RU2827261C1 |
| Беспилотный летательный аппарат для определения электропроводности почвы | 2024 |
|
RU2829829C1 |
| Беспилотный летательный аппарат для определения твердости почвы | 2024 |
|
RU2828501C1 |
| Беспилотный летательный аппарат для определения содержания питательных веществ растений в почве | 2024 |
|
RU2827242C1 |
| Беспилотный летательный аппарат для отбора почвенных образцов | 2024 |
|
RU2828894C1 |
| Беспилотный летательный аппарат для обработки пестицидами пропашных культур | 2023 |
|
RU2808295C1 |
| Беспилотный летательный аппарат для обработки пестицидами садовых деревьев и кустарников | 2023 |
|
RU2808292C1 |
| Беспилотный летательный аппарат для внесения пестицидов в точном садоводстве | 2023 |
|
RU2793020C1 |
| Беспилотный летательный аппарат для внесения пестицидов в промышленном садоводстве и питомниководстве | 2023 |
|
RU2811604C1 |
| Беспилотный летательный аппарат для внесения пестицидов в промышленном садоводстве и питомниководстве | 2023 |
|
RU2808008C1 |
Беспилотный летательный аппарат содержит двигатели, корпус, винты, аккумулятор, посадочное шасси, бортовую систему автоматического управления пилотированием, навигацией и полезной нагрузкой, технологический модуль определения pH, температуры и влажности почвы, подвешенный к корпусу посредством кронштейна. Бортовая система автоматического управления содержит полетный контроллер, связанный с модулем программного обеспечения управления полетом БЛА и модулем управления работой технологического модуля, интегрированную навигационную систему, блок автоматического управления исполнительными механизмами, блок управления работой технологического модуля, модуль датчиков внешней среды и измерения высоты полета. Технологический модуль содержит контроллер, линейный сервопривод, горизонтальную платформу с не менее тремя блоками измерительных зондов определенной длины, расположенными на определенном расстоянии друг от друга и соединенными с датчиками. Обеспечивается повышение производительности и качества выполнения технологического процесса определения установленных значений показателей почвы в режиме реального времени. 2 ил.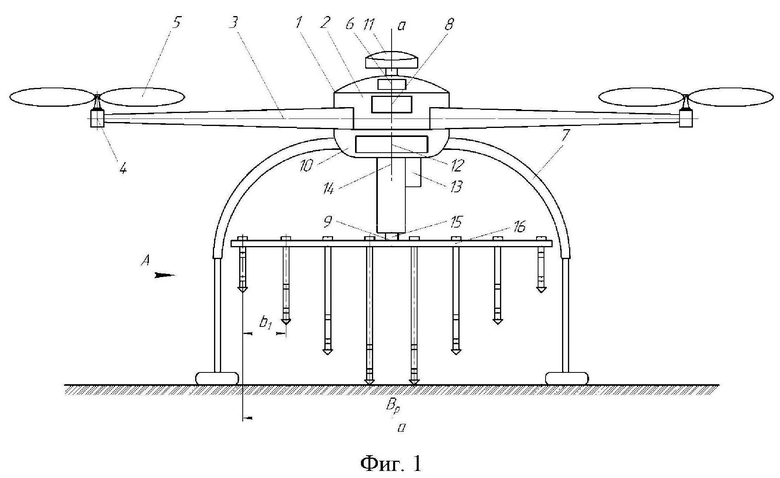
Беспилотный летательный аппарат для определения pH почвы, содержащий корпус, радиальные кронштейны, двигатели, винты, аккумулятор, посадочное шасси, бортовую систему автоматического управления пилотированием, навигацией и полезной нагрузкой с полетным контроллером и центральным процессором, связанным с модулем программного обеспечения управления полетом и модулем программного обеспечения управления работой технологического модуля, интегрированную навигационную систему, технологический модуль определения показателей почвы с линейным сервоприводом и интегрированным датчиком линейного перемещения штока, измерительными зондами, подвешенный к корпусу посредством кронштейна, отличающийся тем, что на конце вертикального штока линейного сервопривода перпендикулярно к вертикальной оси симметрии беспилотного летательного аппарата и соосно с этой осью закреплена горизонтальная платформа, на которой установлены, по крайней мере, три блока измерительных зондов с электродами на равных расстояниях между смежными электродами в ряду и между рядами электродов, причем совокупность длин электродов характеризуется арифметической прогрессией с разностью прогрессии, равной длине наименьшего электрода, причем длина наибольшего электрода больше или равна глубине корнеобитаемой зоны растений, а рабочая ширина захвата платформы равна или больше диаметра корнеобитаемой зоны растений, при этом датчики связаны интерфейсом с контроллером технологического модуля, который соединен линией связи с блоком управления работой технологического модуля, комплексированным с полетным контроллером бортовой системы автоматического управления полетом беспилотного летательного аппарата.
| Способ дистанционного отбора проб грунта, снега с использованием беспилотного летательного аппарата коптерного типа | 2021 |
|
RU2758808C1 |
| ПЫЛЕОТДЕЛИТЕЛЬ | 0 |
|
SU210641A1 |
| БЕСПИЛОТНЫЙ КОМПЛЕКС ХИМИЧЕСКОЙ РАЗВЕДКИ ГРУНТА | 2020 |
|
RU2766308C1 |
| Роторный кантователь | 1959 |
|
SU134654A1 |
| US 20200225207 A1, 16.07.2020. | |||

