Изобретение относится к сельскому хозяйству, в частности к сельскохозяйственным беспилотным летательным аппаратам для определения твердости почвы.
Известно устройство для измерения твердости почвы, содержащее корпус с основанием, реверсивный электродвигатель с редуктором, шестерню с зубчатой рейкой, тензометрический датчик, шток с плунжером, инкрементальный энкодер, электронный блок с энергозависимой памятью, закрепленные на корпусе устройства, модуль GPS/ ГЛОНАСС (патент RU №199862, МПК G01N 9/00, 2020).
Недостатком известного устройства является преимущественно наземный способ перемещения устройства для определения твердости почвы в системе координатного земледелия на разных агрофонах сельскохозяйственного поля, что снижает производительность технологического процесса оценки почвы.
Известен беспилотный летательный аппарат (БЛА), содержащий основной корпус, множество пропеллеров, прикрепленных к основному корпусу, буроподобный коллектор, расположенный от основного корпуса по направлению к земле для сбора почвы, приводное устройство для приведение в движение буроподобного коллектора (Патент КР 10-1845395, 2018). Недостатком известного устройства является невозможность определения сопротивления пенетрации почвы.
Изобретение поясняется чертежами.
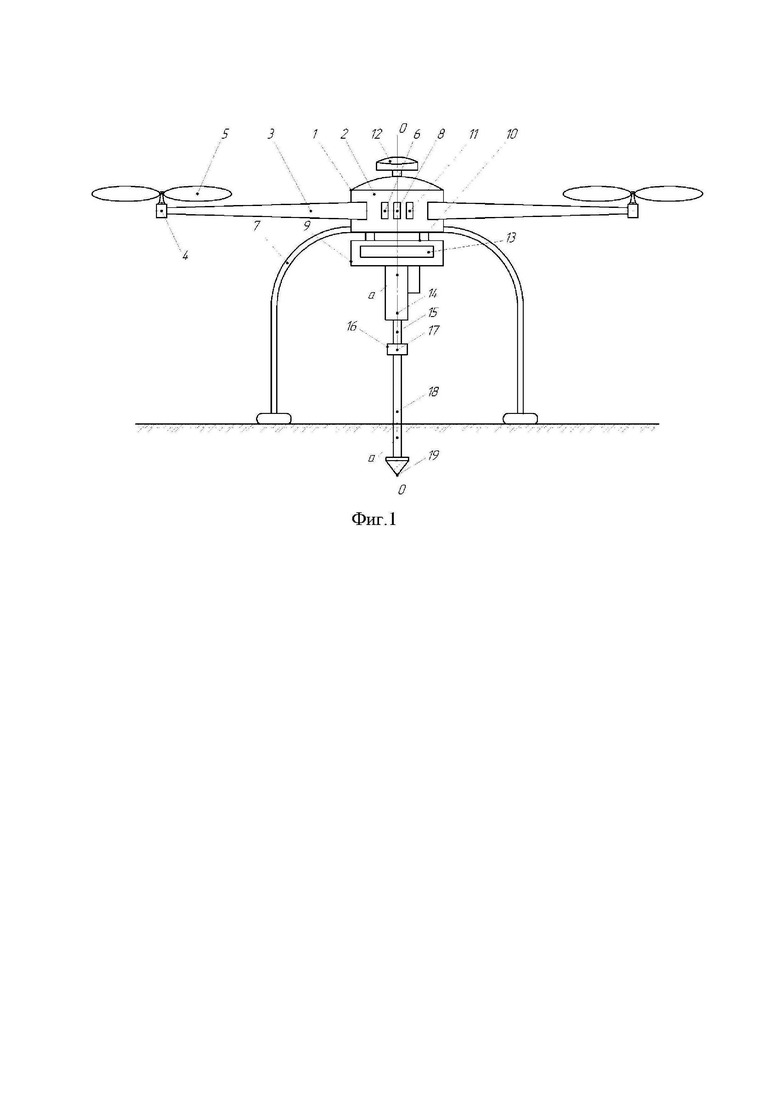
На фиг.1 изображен беспилотный летательный аппарат для определения твердости почвы, вид спереди.
Технической задачей изобретения является повышение производительности технологической операции и снижение затрат труда за счет создания беспилотного летательного аппарата для определения твердости почвы в течение всего периода возделывания сельскохозяйственных культур, в любой точке сельскохозяйственного поля, независимо от его рельефа.
Поставленная техническая задача достигается тем, что в беспилотном летательном аппарате для определения твердости почвы, содержащем радиальные кронштейны, двигатели, винты, аккумулятор, посадочное шасси, бортовую систему автоматического управления пилотированием, навигацией и полезной нагрузкой с полетным контроллером и процессором, связанным с модулем программного обеспечения управления полетом и модулем программного обеспечения управления работой технологического модуля, интегрированную навигационную систему, технологический модуль с линейным сервоприводом и интегрированным контроллером линейного перемещения штока, согласно изобретению, что технологический модуль беспилотного летательного аппарата снабжен электронным измерителем твердости почвы с регистрирующим блоком и почвенным штоком с плунжером, при этом регистрирующий блок с одной стороны закреплен на конце штока линейного сервопривода, а с другой стороны соединен с почвенным штоком с плунжером с осью симметрии, совпадающей с осью симметрии беспилотного летательного аппарата, причем контроллер линейного сервопривода и регистрирующий блок электронного измерителя твердости почвы соединены линией связи с электронным блоком управления работой технологического модуля, а электронный блоком управления работой технологического модуля комплексирован с полетным контроллером беспилотного летательного аппарата.
Устройство поясняется чертежом, на котором представлена принципиальная схема беспилотного летательного аппарата для определения твердости почвы.
Беспилотный летательный аппарат 1 (БЛА) для определения содержания питательных веществ растений в почве содержит корпус 2, соединенные с ним радиальные кронштейны 3, двигатели 4, винты 5, систему электроснабжения с аккумулятором 6, посадочное шасси 7, бортовую систему автоматического управления 8 пилотированием, навигацией и полезной нагрузкой, технологический модуль 9, прикрепленный к корпусу 2 посредством кронштейнов 10.
Система автоматического управления 8 содержит полетный контроллер с процессором, блок датчиков, интегрированную навигационную систему с приемником ГЛОНАСС 11 и антенной 12, блок 13 управления работой технологического модуля 9. Полетный контроллер комплексирован с блоками автоматического управления исполнительными механизмами двигателей 4 и электронным блоком 13 управления работой технологического модуля 9. Система управления БЛА позволяет производить автоматический взлет и посадку летательного аппарата и выполнять полет по заданной траектории с привязкой к географическим координатам.
Технологический модуль 9 содержит линейный сервопривод 14, закрепленный в нижней части БЛА1по вертикальной его оси симметрии o-o, работающий в режиме линейного актуатора с интегрированным контроллером линейного реверсивного перемещения штока 15,электронный измеритель16 твердости почвы с регистрирующим блоком 17 и почвенным штоком 18 с плунжером 19 с осью симметрии a-a, совпадающей с осью симметрии o-о. Регистрирующий блок 17 с одной стороны закреплен на конце штока 15 линейного сервопривода 14, а с другой стороны соединен с почвенным штоком 18 с плунжером 19. Контроллер линейного сервопривода 14 и регистрирующий блок 17 электронного измерителя 16 твердости почвы соединены линией связи с электронным блоком 13 управления работой технологического модуля 9, а электронный блок 13 комплексирован с полетным контроллером (не показано) системы автоматического управления 8 БЛА1.
Работает беспилотный летательный аппарат для определения твердости почвы следующим образом.
В процессор полетного контроллера БЛА 1 загружают полетное задание, в котором отображают в электронном виде параметры маршрута полета и электронную карту-задание, являющиеся программой определения на каждом элементарном участке сельскохозяйственного поля точек измерения твердости почвы. Для этого устанавливают границы и площадь поля, длину гона, координаты точек измерения твердости почвы по маршруту, координаты начальной точки и координаты точки окончания полета, рабочую скорость и высоту полета, наименьшую рабочую траекторию полета, координаты посадочной площадки для замены или подзарядки аккумуляторной батареи.
От контроллера БЛА1 сигнал передаётся в блок системы автоматического управления полетом, запускаются двигатели 4, производится раскрутка несущих винтов 5 и двигатели 4 переводятся во взлетный режим. Производится вертикальный взлет БЛА 1, который, в соответствии с программой полета, подлетает к точке стартовых координат рабочей траектории полета, при этом координаты, определяемые интегрированной навигационной системой, сравниваются с заданными координатами, введенными в программу траекторного полета.
При подлете к заданной точке БЛА 1 зависает и осуществляет посадку на грунт. Блок управления 13 передает управляющие сигналы на контроллер линейного сервопривода 14 с реверсивным линейным электроприводом, шток 15 которого начинает выдвигаться на расстояние равное глубине погружения плунжера 19 в почву. Шток 15 воздействует на почвенный шток 18, который вместе с плунжером 19 погружается в почву.
В результате действия силы сопротивления почвы на плунжер 19 давление через шток 18 передается на силоизмерительный датчик блока 17, который формирует сигналы пропорционально твердости почвы на заданных уровнях пахотного и подпахотного слоя. Сигналы от датчика блока 17 передаются в блок 13 и далее в процессор полетного контроллера, который записывает координаты точки определения твердости почвы и показатели, отображающие твердость почвы. Контроллер БЛА1 передает сигнал в блок 13 о фиксировании показателей твердости почвы в заданной точке с заданными координатами. От блока 13 передается сигнал на контроллер линейного сервопривода 14. В результате шток 15 получает реверсивное движение и поднимает почвенный шток 18 с плунжером 19, устанавливая его в исходное для полета БЛА 1 положение. Контроллер БЛА1 передаётся сигнал в блок системы автоматического управления полетом на взлет и перелет БЛА 1к следующей заданной точки определения твердости почвы.
Применение беспилотного летательного аппарата обеспечит определение твердости почвы в любой точке сельскохозяйственного поля, независимо от его рельефа, повысит производительность технологической операции и снижение затрат труда.
| название | год | авторы | номер документа |
|---|---|---|---|
| Беспилотный летательный аппарат для определения электропроводности почвы | 2024 |
|
RU2829829C1 |
| Беспилотный летательный аппарат для определения влажности почвы | 2024 |
|
RU2827261C1 |
| Беспилотный летательный аппарат для отбора почвенных образцов | 2024 |
|
RU2828894C1 |
| Беспилотный летательный аппарат для определения содержания питательных веществ растений в почве | 2024 |
|
RU2827242C1 |
| Беспилотный летательный аппарат для определения pH почвы | 2024 |
|
RU2829672C1 |
| Беспилотный летательный аппарат для обработки пестицидами садовых деревьев и кустарников | 2023 |
|
RU2808292C1 |
| Беспилотный летательный аппарат для внесения пестицидов в точном садоводстве | 2023 |
|
RU2793020C1 |
| Беспилотный летательный аппарат для внесения пестицидов в промышленном садоводстве и питомниководстве | 2023 |
|
RU2811604C1 |
| Беспилотный летательный аппарат для внесения пестицидов в промышленном садоводстве и питомниководстве | 2023 |
|
RU2808008C1 |
| Беспилотный летательный аппарат для обработки пестицидами пропашных культур | 2023 |
|
RU2808295C1 |
Беспилотный летательный аппарат для определения твердости почвы содержит корпус, радиальные кронштейны, двигатели, винты, аккумулятор, посадочное шасси, бортовую систему автоматического управления пилотированием, навигацией и полезной нагрузкой с полетным контроллером и процессором, связанным с модулем программного обеспечения управления полетом и модулем программного обеспечения управления работой технологического модуля, интегрированную навигационную систему, технологический модуль с линейным сервоприводом и интегрированным контроллером линейного перемещения штока. Технологический модуль содержит измеритель твердости почвы с регистрирующим блоком и почвенным штоком с плунжером, соединенные определенным образом. Обеспечивается повышение производительности технологической операции определения твердости почвы в любой точке сельскохозяйственного поля, независимо от его рельефа. 1 ил.
Беспилотный летательный аппарат для определения твердости почвы, содержащий корпус, радиальные кронштейны, двигатели, винты, аккумулятор, посадочное шасси, бортовую систему автоматического управления пилотированием, навигацией и полезной нагрузкой с полетным контроллером и процессором, связанным с модулем программного обеспечения управления полетом и модулем программного обеспечения управления работой технологического модуля, интегрированную навигационную систему, технологический модуль с линейным сервоприводом и интегрированным контроллером линейного перемещения штока, отличающийся тем, что технологический модуль беспилотного летательного аппарата снабжен электронным измерителем твердости почвы с регистрирующим блоком и почвенным штоком с плунжером, при этом регистрирующий блок с одной стороны закреплен на конце штока линейного сервопривода, а с другой стороны соединен с почвенным штоком с плунжером с осью симметрии, совпадающей с осью симметрии беспилотного летательного аппарата, причем контроллер линейного сервопривода и регистрирующий блок электронного измерителя твердости почвы соединены линией связи с электронным блоком управления работой технологического модуля, а электронный блоком управления работой технологического модуля комплексирован с полетным контроллером беспилотного летательного аппарата.
| Способ дистанционного отбора проб грунта, снега с использованием беспилотного летательного аппарата коптерного типа | 2021 |
|
RU2758808C1 |
| ПРОБООТБОРНИК ГРУНТА ДЛЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА ВЕРТОЛЁТНОГО ТИПА | 2022 |
|
RU2790164C1 |
| US 20240060952 A1, 22.02.2024 | |||
| US 11713117 B2, 01.08.2023 | |||
| US 20220237912 A1, 28.07.2022. | |||

