Предлагаемое устройство относится к области измерительной техники и может быть использовано в автоматике, станкостроении, приборостроении, робототехнике, системах слежения и других областях техники.
Известны многочисленные прецизионные преобразователи угла, описанные, например, в кн.: Бабушкин С.Г. и др. «Оптико-механические приборы», 1963 г. Наиболее совершенными из них являются электромеханические приборы типа вращающегося трансформатора и оптические гониометры.
В оптических гониометрах использован коллимационный принцип измерений угла поворота вала, на котором жестко закреплены многогранные зеркальные призмы. Отечественные гониометры типа ГС-10, ГС-5 и ГС-2 имеют точность 10", 5" и 2" соответственно, в неограниченном диапазоне углов. Однако габариты этих приборов очень велики (более 0,5×0,5×0,5 м3).
Основными недостатками этих приборов, принятых за аналоги, являются:
- большие габариты и масса устройств;
- ограниченные точности измерений из-за влияния люфтов, зазоров, осей вращений и узлов сопряжения с осью вращения объекта;
- высокая стоимость приборов, которая для современных преобразователей класса точности 1÷3 угловых секунд достигает 3000 $ и более.
Известны также фотоэлектрические кодовые датчики вал-код (см., например, кн.: Мелькин Н.В. «Фотоэлектрические преобразователи угловой величины в цифровой код» // Судпромгиз, 1966 г.) и самые прецизионные из них - приборы с интерполяцией в последнем разряде (Вульбет Дж. Датчики в цифровых системах // М.: Энергоиздат, 1981 г., стр.201). Современные отечественные приборы, производимые СКБИС (г.Санкт-Петербург), обладают третьим классом погрешности измерений до 3,5 угл. сек, например, прибор ЛИР-ДА 190 (http://www.skbs.ru) при габаритах: диаметр 90 мм × 60 мм и массе 0,7 кг.
Известны устройства по патенту США №5018853 (28.05.1991), авт.св. СССР №1805287 (30.03.1993). Однако в этих устройствах применена ПЗС-линейка, а не двумерная ПЗС-матрица, что является принципиальным отличием заявленного устройства. Действительно, функционирование ПЗС-линейки с одной сигнальной щелью принципиально невозможно для построения полноценного преобразователя угла с диапазоном измерений 0÷360°. Поэтому устройство по патенту США №5018853 работоспособно только в диапазоне 0÷90° (описание к патенту США №5018853, Summary of the invention, столбец 2, строка 20). Для измерения угла в необходимом диапазоне 0÷360° требуется иметь две взаимно перпендикулярные щели со сложной системой волоконно-оптической связи между объектом и измерителем для переключения подсветки этих щелей (см., например, устройство по авт. св. СССР №1805287). Кроме того, за счет того, что число пикселов ПЗС-матрицы примерно в 103 раз превышает число пикселов ПЗС-линейки, имеется возможность построения осесимметричных измерительных схем измерения угла, что приводит к повышению точности измерений в 100 и более раз, по сравнению со схемами аналогов. Таким образом, устройства, описанные в этих патентах, решают узкие задачи с низкой точностью.
Известны также устройства, описанные в заявках DE 102007023993 (27.11.2008), JP 2069641 (08.03.1990). Эти устройства, наоборот, содержат приемную ПЗС-матрицу и не содержат сигнальную щель, необходимую для прецизионных измерений угла. В них производится грубое измерение угла совместно с измерением других линейных величин (Δх, Δу и т.п.). Поэтому размеры изображений сигнальных структур в плоскости приемных ПЗС-матриц вынужденно намного меньше размеров самих матриц, что приводит к резкому уменьшению точности определения измеряемых параметров (в том числе и угла разворота объекта).
Ближайшим аналогом (прототипом) выбирается устройство, описанное в кн.: Вульбет Дж. Датчики в цифровых системах // Москва, Энергоиздат, 1981, стр.201.
Схема прибора - аналога содержит механическую муфту связи контролируемого объекта с осью ротора преобразователя. На оси ротора жестко закреплен стеклянный диск с круговыми кадровыми дорожками (закодированными в коде Грея), а статор прибора содержит систему освещающих диодов и фотодетекторов, число которых равно числу кодовых дорожек.
В цепи приемных фотодетекторов формируются двухуровневые сигналы (0 и 1) двоичного кода Грея, преображающиеся приемной схемой прибора в двоичный код измеряемого угла поворота вала ротора.
Физическим ограничением точности этого преобразователя является линейный размер периода младшего разряда кода, который не может быть меньше длины волны света λ (≈0,5 мкм) из-за дифракции света.
Отсюда следуют основные недостатки прототипа:
- большие габариты и массы прибора;
- сложные механические узлы, обеспечивающие повороты кодового диска и сопряжения его с осью вращения объекта;
- высокая стоимость прибора.
Предлагаемое изобретение направлено на решение следующих задач:
- повышение точностных и эксплуатационных характеристик;
- уменьшение габаритов и масс преобразователей;
- уменьшение стоимости приборов.
Поставленные задачи решаются тем, что, во-первых, в преобразователях применен новый для этого типа приборов фотодетектор - многоэлементные устройства, ПЗС-матрицы, на которых возможно измерение линейных перемещений 0,01 мкм и выше, что, соответственно, приводит к снижению габаритов примерно в 10 раз по сравнению с прототипом. Кроме того, стоимость серийных образцов ПЗС-матриц составляет 100÷250 $, что и определяет низкую стоимость самого прибора.
Во-вторых, оптические схемы (как на просвет, так и на отражение) и контрольные элементы, устанавливаемые на измеряемом объекте, очень просты и дешевы, что также приводит к снижению стоимости преобразователя.
В-третьих, оптическая связь между прибором и объектом измерения (вместо механической связи в приборе-прототипе) приводит к тому, что конструкция преобразователя вообще не содержит подвижных элементов, а расстояние между прибором и объектом может принимать различные значения. Это приводит, в свою очередь, к увеличению реальной точности измерений и расширению функциональных возможностей преобразователя.
В-четвертых, в схеме прибора используется контроллер (ПК), осуществляющий программное обеспечение работы преобразователя и хранящий в памяти результаты метрологической калибровки, что также приводит к повышению точности измерений.
Сущность изобретения поясняется фиг.1, 2, 3.
На фиг.1 приведена принципиальная схема преобразователя с активным по энергии контрольным элементом.
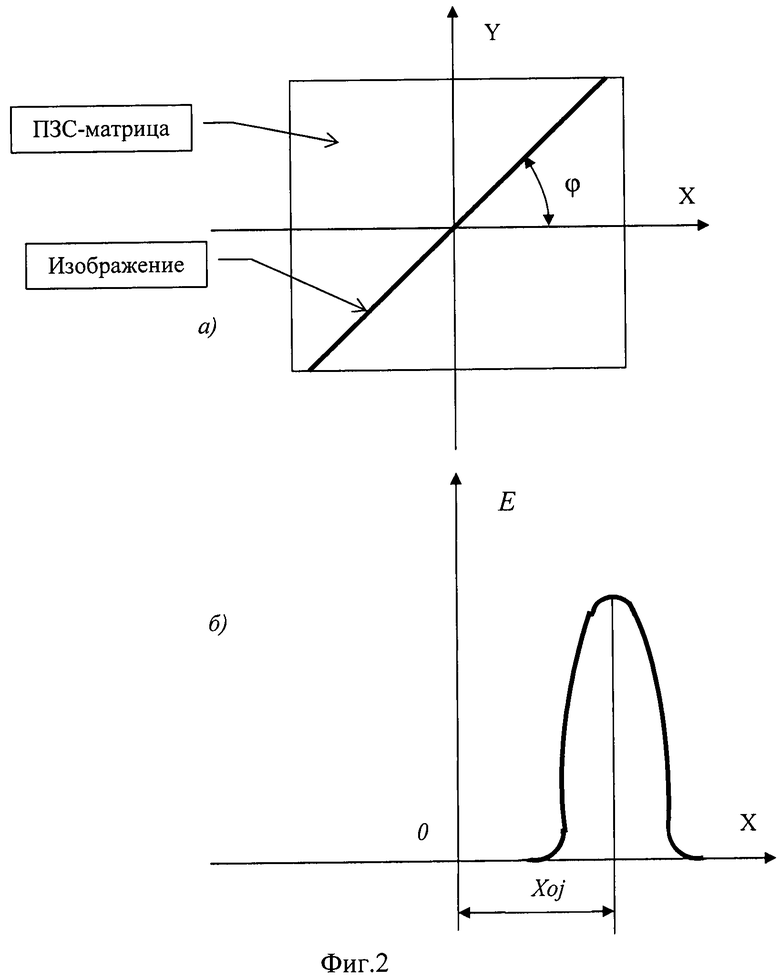
На фиг.2 приведено сигнальное оптическое изображение и его электрический эквивалент.
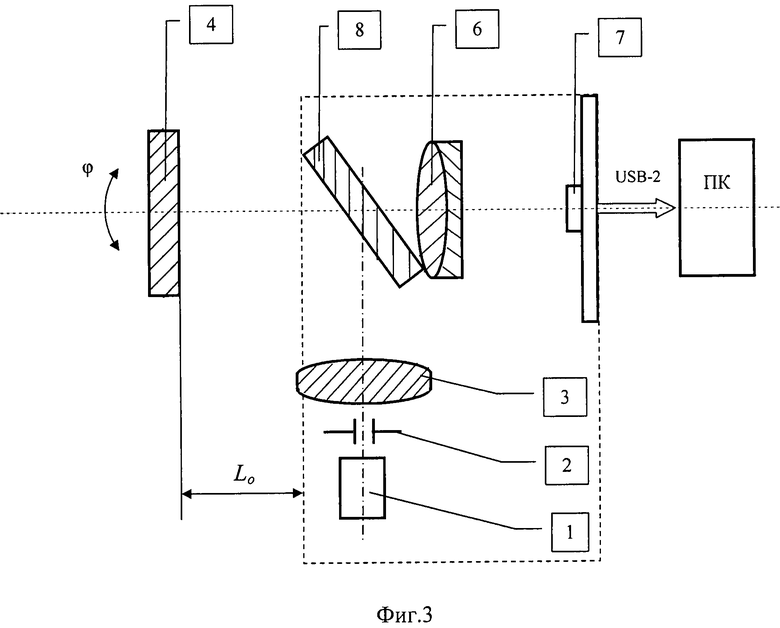
На фиг.3 приведена схема прибора с пассивным по энергии контрольным элементом.
На фиг.1 изображен контрольный элемент КЭ, жестко закрепленный на поворотном валу, и измерительный блок ИБ.
Контрольный элемент КЭ содержит светодиод 1, точечную диафрагму 2, конденсор 3, сигнальную маску 4, расположенную в фокальной плоскости объектива 5. Приемный узел содержит объектив 6 и приемную ПЗС - (КМОП) матрицу 7, сигнал с которой по USB-2.0 - порту поступает на персональный компьютер ПК или специализированный контроллер.
Устройство работает следующим образом.
Осветитель контрольного элемента (светодиод 1, точечная диафрагма 2 и конденсор 3) формирует равномерный параллельный световой поток, который освещает сигнальную маску 4. Сигнальная маска представляет собой прозрачную узкую щель на непрозрачной подложке (фиг.1б). Маска 4 может быть выполнена на стеклянной дисковой детали или в виде металлических ножей. Объектив 5, в фокальной плоскости которого расположена сигнальная маска 4, образует коллимационное изображение световой щели сигнальной маски 4, которое развернуто на измеряемый угол φ относительно измерительного блока.
Объектив 6 приемного узла строит в своей фокальной плоскости изображение светящейся маски 4 КЭ. Эта плоскость совмещена с приемной плоскостью приемной матрицы 7, которая и детектирует это изображение светящейся маски 4.
На фиг.2 представлено изображение светлого штриха маски 4 в плоскости приемной матрицы 7, а на фиг.2б приведен график электрического сигнала по отдельной строке матрицы.
С помощью приемной матрицы 7 оптическое изображение преобразуется в электронно-цифровой эквивалент и поступает на персональный компьютер ПК.
С помощью специализированных алгоритмов обработки информации в ПК производится вычисление по каждой строке j приемной матрицы координаты xoj энергетического центра точек изображения сигнального штриха (фиг.2а).
Угол φj определяется из очевидного соотношения
где Δуп - размер пикселя матрицы 7 (Δуп=3÷5 мкм),
j - номер строки матрицы 7.
При значениях φ>45° строки и столбцы транспонируются с заменой j→i, и вычисления производятся по каждому столбцу i матрицы 7.
Таким образом, производится определение измеряемого угла φ в диапазоне 0÷360°.
Вычисленный алгоритм угла φ равен

где М - число строк (столбцов) приемной матрицы (М=103).
Поэтому случайная погрешность δφ измерений

Экспериментально измеренное значение координаты xoj энергетического центра изображения штриха равно 0,03 Δxп (Δуп), где Δxп (Δуп) - х и у - размеры пикселя приемной матрицы 7.
Следовательно, по формулам (2) и (3) получаем

Все систематические ошибки прибора могут быть выявлены и исключены на этапе калибровки (с точностью используемого эталонного устройства). Поэтому реальная точность измерений прибора определяется величиной δφ.
На настоящий момент изготовлен и испытан макет устройства по схеме фиг.1. В макете использована ПЗС-матрица с разрядностью 640×480 пикселей. Случайная погрешность на макете составила δφ=0,3 угл. сек для всех углов в диапазоне 360°.
Световые диаметры прибора определяются размерами приемной матрицы и равны 6×6 мм. Однако размеры платы обвязки матрицы равны ≈30×30 мм2, что и определяет реальные габариты прибора, которые намного меньше габаритов фотоэлектрических кодовых датчиков сравнимой точности измерений.
Себестоимость прибора по схеме на фиг.1 определяется, в основном, стоимостью матрицы 7 вместе с объективом 6, которая равна 200÷250 $.
Общая себестоимость прибора не превышает 400÷500 $, что намного меньше цены современных приборов класса точности 0,2-0,3 угловых секунд.
Схема фиг.1 обладает также очень важным достоинством, которое заключается в том, что расстояние между КЭ и приемным модулем может быть переменным в достаточно широких пределах. Это объясняется тем, что схема прибора является коллимационной.
Кроме того, поскольку между КЭ и приемным модулем осуществляется оптическая связь, то в приборе отсутствуют подвижные части и любые переходные элементы (муфты) между КЭ и приемным узлом.
На фиг.3 приведена авторефлекторная модификация схемы преобразователя. Приемный узел этой схемы содержит осветительный узел (светодиод 1, диафрагму 2, конденсор 3, светоделительную пластину 8) и приемный узел (объектив 6 и матрицу 7). Контрольный элемент представлен маской 4 с узким зеркальным штрихом вместо прозрачной щели в схеме на фиг.1.
Изображение этого штриха, подсвеченное осветителем, строится объективом 6 в приемной плоскости матрицы 7.
Это изображение, его детектирование и алгоритмы обработки информации аналогичны тем, что были приведены при описании работы схемы на фиг.1.
Единственным существенным отличием схемы на фиг.2 от схемы на фиг.1 состоит в том, что расстояние между КЭ (п.4) и приемным модулем является постоянным, поскольку эта схема прибора не является (авто) коллимационной.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ПЛОСКОГО УГЛА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2451903C1 |
| СПОСОБ ИЗМЕРЕНИЯ СИСТЕМАТИЧЕСКИХ ПОГРЕШНОСТЕЙ УГЛОВЫХ ЭНКОДЕРОВ | 2014 |
|
RU2558000C1 |
| БЕСКОНТАКТНЫЙ ИЗМЕРИТЕЛЬ РАССТОЯНИЙ | 1996 |
|
RU2124700C1 |
| БЕСКОНТАКТНЫЙ ИЗМЕРИТЕЛЬ ПРОФИЛЯ | 2008 |
|
RU2399024C2 |
| БЕСКОНТАКТНЫЙ ТРЕХКООРДИНАТНЫЙ ИЗМЕРИТЕЛЬ | 2000 |
|
RU2191348C2 |
| ДАТЧИК УГЛА ПОВОРОТА | 2017 |
|
RU2644994C1 |
| ПРЕЦИЗИОННЫЙ ДАТЧИК РАССТОЯНИЙ | 2014 |
|
RU2567185C1 |
| ДАТЧИК УГЛА ПОВОРОТА | 2013 |
|
RU2569072C2 |
| ДАТЧИК УГЛА ПОВОРОТА | 2024 |
|
RU2829832C1 |
| Устройство для измерений мгновенных угловых перемещений качающейся платформы | 2016 |
|
RU2642975C2 |
Абсолютный преобразователь угла в соответствии с первым вариантом исполнения содержит контрольный элемент, закрепленный на контролируемом объекте, и приемный узел. Контрольный элемент состоит из источника света и сигнальной маски с прозрачной щелью, расположенной в фокальной плоскости объектива. Приемный узел состоит из объектива, в фокальной плоскости которого установлена приемная матрица. Выход приемной матрицы подключен к персональному компьютеру, осуществляющему определение угла разворота контрольного элемента по пространственному положению изображения светящейся щели относительно приемной матрицы. В соответствии со вторым вариантом исполнения контрольный элемент, закрепленный на контролируемом объекте, состоит из сигнальной маски с зеркальным штрихом. При этом приемный узел содержит осветитель с источником света для подсветки сигнальной маски и приемный объектив, строящий изображение зеркального штриха в плоскости приемной матрицы. Технический результат заключается в повышении точностных и эксплуатационных характеристик и в уменьшении габаритов и массы преобразователя. 2 н.п. ф-лы, 3 ил.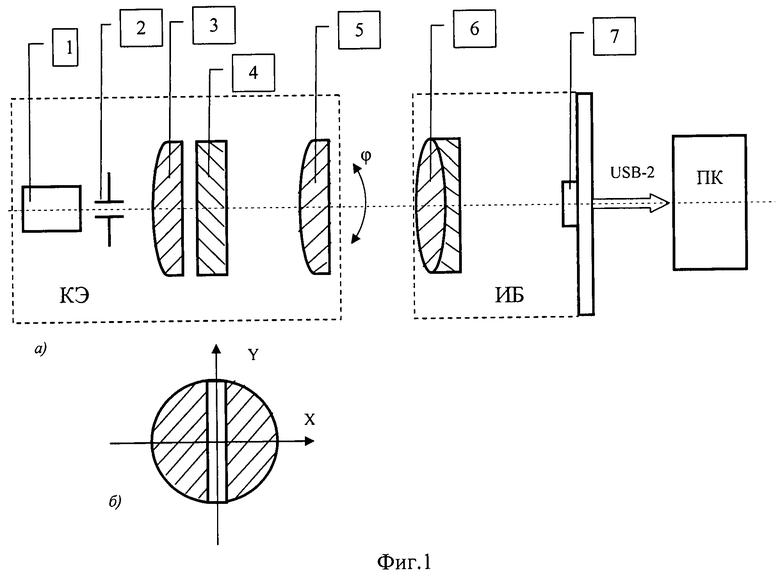
1. Абсолютный преобразователь угла, отличающийся тем, что он содержит контрольный элемент, закрепленный на контролируемом объекте и состоящий из источника света, сигнальной маски с прозрачной щелью, расположенной в фокальной плоскости объектива, и приемный узел, состоящий из объектива, в фокальной плоскости которого установлена приемная матрица (ПЗС или КМОП-матрица), выход которой подключен к персональному компьютеру (контроллеру), осуществляющему определение угла разворота контрольного элемента по пространственному положению изображения светящейся щели относительно приемной матрицы.
2. Абсолютный преобразователь угла, отличающийся тем, что он содержит контрольный элемент, закрепленный на контролируемом объекте и состоящий из сигнальной маски с зеркальным штрихом, и приемный узел, включающий осветитель с источником света для подсветки сигнальной маски, приемный объектив, строящий изображение зеркального штриха в плоскости ПЗС или КМОП-матрицы, выход которой подключен к персональному компьютеру (контроллеру), осуществляющему определение угла разворота контрольного элемента по пространственному положению изображения зеркального штриха относительно приемной матрицы.
| US 5018853 А, 28.05.1991 | |||
| Способ измерения угловых перемещений объекта и устройство для его осуществления | 1990 |
|
SU1805287A1 |
| DE 102007023993 A1, 27.11.2008 | |||
| СПОСОБ ОЧИСТКИ ПИТЬЕВОЙ ВОДЫ И СПОСОБ ПОЛУЧЕНИЯ БАКТЕРИЦИДНОГО СРЕДСТВА ДЛЯ ОЧИСТКИ ВОДЫ (ВАРИАНТЫ) | 1993 |
|
RU2069641C1 |

