[0001] Настоящая патентная заявка притязает на приоритет на основе китайской заявки № 202011461107.8, поданной 11 декабря 2020 года, и китайской заявки № 202110948745.0, поданной 18 августа 2021 года; все содержание этих двух заявок включено в данный документ путем ссылки.
Область техники
[0002] Настоящее изобретение относится к области техники интеллектуального управления, в частности, к способу и устройству управления очисткой, машиночитаемого носителя информации и электронного оборудования для уборочного оборудования или уборочной системы.
Уровень техники
[0003] С появлением умных домов в повседневную домашнюю жизнь людей постепенно вошли умные бытовые приборы, появилось разнообразное автоматическое уборочное оборудование, такое как автоматические роботы-подметальщики и автоматические роботы-полотеры. Обладая интеллектуальными функциями, такое уборочное оборудование может автоматически выполнять такие работы по уборке, как подметание, сбор пыли и мытье полов, став необходимым для многих семей.
[0004] Однако большинство существующих роботов-подметальщиков могут только выполнять уборку помещений, но после завершения уборки никто не занимается очисткой самого робота-пылесоса. Обычно пользователям приходится самим вручную мыть швабру, щетку и другие устройства робота-подметальщика; это сложно и доставляет пользователям много неудобств. Хотя известны системы, которые обеспечивают автоматическую очистку уборочных компонентов робота-пылесоса на базовой станции (см., например, WO 2018107465 А1 и CN 110916569 А), функция автоматической очистки уборочных компонентов усложняет выполнение зарядки уборочного оборудования на этой же базовой станции и требует усовершенствования.
[0005] Следует отметить, что информация, указанная выше в разделе выше "Уровень техники", используется только для улучшения понимания предпосылок изобретения и может включать информацию, которая не относится к предшествующему уровню техники, известному обычному техническому специалисту в данной области.
Раскрытие сущности изобретения
[0006] Целью настоящего изобретения является обеспечение способа и устройства управления очисткой компонентов уборочного оборудования, используемых для уборки, машиночитаемого носителя информации и электронного оборудования, а затем, по меньшей мере, в определенной степени преодолеть неудобства, вызванные неспособностью уборочного оборудования автоматически очищать свои компоненты, из-за ограничений и недостатков соответствующих технологий.
[0007] В одном из аспектов настоящего изобретения представлен способ управления очисткой компонентов уборочного оборудовании, который заключается в следующем: после того как уборочное оборудование возвращается на зарядную станцию в первом положении, уборочные компоненты на зарядной станции начинают выполнять задачи по очистке компонентов уборочного оборудования; если задача по очистке является последней в процессе текущей уборки, то после завершения этой задачи уборочное оборудование выходит с зарядной станции, а потом снова возвращается на нее во втором положении; при этом первое и второе положения отличаются друг от друга.
[0008] В другом аспекте настоящего изобретения представлено устройство управления очисткой компонентов уборочного оборудования, которое включает в себя модуль управления в первом положении и модуль управления во втором положении.
[0009] В частности, модуль управления в первом положении может использоваться для следующего: когда уборочное оборудование в первом положении возвращается на зарядную станцию, уборочные компоненты на зарядной станции начинают выполнять задачи по очистке компонентов на уборочном оборудовании; модуль управления во втором положении может использоваться для следующего: если задача по очистке является последней в процессе текущей уборки, после выполнения задачи уборочное оборудование покидает зарядную станцию и снова возвращается на нее во втором положении; при этом первое и второе положения отличаются друг от друга.
[0010] В другом аспекте настоящего изобретения представлен способ управления уборочной системой; уборочная система состоит из уборочного оборудования и зарядной станции; способ управления заключается в следующем: получаются данные о текущем рабочем состоянии уборочного оборудования; когда определяется, что уборочное оборудование находится в предустановленном рабочем состоянии, определяется положение уборочного оборудования и зарядной станции относительно друг друга; на основании этого относительного положения к ведущему колесу уборочного оборудования прилагается движущая сила, чтобы уборочное оборудование перемещалось относительно зарядной станции или оставалось на ней.
[0011] Еще в одном аспекте настоящего изобретения представлено устройство управления уборочной системой; уборочная система включает в себя уборочное оборудование и зарядную станцию; устройство управления включает в себя следующее: модуль сбора данных, предназначенный для получения данных текущего рабочего состояния уборочного оборудования; модуль определения, предназначенный для определения положения уборочного оборудования и зарядной станции относительно друг друга, когда уборочное оборудование находится в предустановленном рабочем состоянии; и приводной модуль, предназначенный для приведения в движение ведущего колеса уборочного оборудования в соответствии с положением уборочного оборудования и зарядной станции относительно друга, чтобы уборочное оборудование перемещалось только относительно зарядной станции или оставалось на ней.
[0012] Еще в одном аспекте настоящего изобретения представлен носитель информации, на котором хранится компьютерная программа, и когда она выполняется процессором, реализуется любой из перечисленных выше способов управления очисткой компонентов уборочного оборудования или любой из перечисленных выше способов управления уборочной системой.
[0013] Еще в одном аспекте настоящего изобретения представлено электронное устройство, которое содержит процессор и запоминающее устройство для хранения исполняемых команд процессора; при этом процессор предназначен для реализации любых из перечисленных выше способов управления очисткой компонентов уборочного оборудования посредством выполнения исполняемых команд.
[0014] Следует понимать, что приведенное выше общее описание и последующее подробное описание предназначены лишь для иллюстрации и пояснений и не могут ограничивать данное изобретение.
Описание прилагаемых чертежей
[0015] Прилагаемые чертежи, которые включены в настоящее описание и составляют его часть, иллюстрируют варианты реализации данного изобретения и вместе с описанием служат для пояснения принципов действия изобретения. Очевидно, что чертежи, представленные ниже, показывают лишь некоторые варианты реализации настоящего изобретения; специалисты в данной области техники могут на их основе получить другие чертежи, не прилагая усилий по изобретению. На чертежах:
[0016] На фиг. 1 показана технологическая схема способа управления очисткой компонентов уборочного оборудовании в варианте реализации настоящего изобретения;
[0017] На фиг. 2 показано схематическое изображение формы уборочного оборудования в варианте реализации настоящего изобретения;
[0018] На фиг. 3 показано схематическое изображение формы зарядной станции в варианте реализации настоящего изобретения;
[0019] На фиг. 4 показано схематическое изображение уборочного оборудования в первом положении после возврата на зарядную станцию в варианте реализации настоящего изобретения;
[0020] На фиг. 5 показано схематическое изображение контроля уровня воды в промывочной емкости в рамках настоящего изобретения;
[0021] На фиг. 6 показано схематическое изображение контроля уровня воды в промывочной емкости в рамках настоящего изобретения;
[0022] На фиг. 7 показано схематическое изображение уборочного оборудования во втором положении, когда оно возвращается на зарядную станцию в рамках настоящего изобретения;
[0023] На фиг. 8 показано схематическое изображение зарядки уборочного оборудования в рамках настоящего изобретения;
[0024] На фиг. 9 показано схематическое изображение зарядного контакта на зарядной станции в рамках настоящего изобретения;
[0025] На фиг. 10 показан вид сбоку уборочного оборудования в варианте реализации настоящего изобретения;
[0026] На фиг. 11 показана блок-схема устройства управления очисткой компонентов уборочного оборудовании в варианте реализации настоящего изобретения;
[0027] На фиг. 12 показана блок-схема электронного оборудования в варианте реализации настоящего изобретения;
[0028] На фиг. 13 показано схематическое изображение сценария применения уборочной системы, описанной в варианте реализации настоящего изобретения;
[0029] На фиг. 14 показана технологическая схема способа управления в уборочной системе в варианте реализации настоящего изобретения;
[0030] На фиг. 15 показано схематическое изображение управления уборочным оборудованием, когда оно стабильно находится в указанном месте на зарядной станции в варианте реализации настоящего изобретения;
[0031] На фиг. 16А и 16В показано схематическое изображение управления уборочным оборудованием согласно примеру реализации, когда оно отходит от заданного места на зарядной станции;
[0032] На фиг. 17 показано схематическое изображение смены позиции зарядной станции в варианте реализации настоящего изобретения;
[0033] На фиг. 18 показано схематическое изображение управления уборочным оборудованием, покидающим зарядную станцию в варианте реализации настоящего изобретения;
[0034] На фиг. 19 показана блок-схема устройства управления в уборочной системе в варианте реализации настоящего изобретения;
[0035] На фиг. 20 показана блок-схема электронного оборудования, используемого в варианте реализации настоящего изобретения.
Конкретные варианты реализации
[0036] Теперь варианты реализации будут описаны более подробно со ссылкой на прилагаемые чертежи. Однако, каждый вариант реализации может быть реализован во многих формах, и его не следует ограничивать лишь описанным здесь вариантом; напротив, эти варианты реализации делают изобретение более всеобъемлющим и полным, идея вариантов реализации полностью доведены до сведения технического персонала в данной области. Описанные здесь свойства, структуры или характеристики могут быть объединены в одном или нескольких вариантах реализации любым подходящим способом. В описании ниже приводится множество конкретных деталей, призванных дать полное понимание вариантов реализации этого изобретения. Тем не менее, специалисты в данной области поймут, что во время применения на практике технического решения в данном изобретении одна или несколько конкретных деталей могут быть опущены, или могут быть использованы другие способы, компоненты, устройства, этапы и т.д. В других случаях хорошо известные технические решения не показаны и не описаны подробно, чтобы не отходить от главного и не ухудшить понимание данного изобретения.
[0037] Кроме того, чертежи являются лишь схематическими иллюстрациями настоящего изобретения и не обязательно выполнены в масштабе. Одни и те же обозначения на чертежах указывают на одни и те же или похожие детали, поэтому они не будут описываться повторно. Некоторые из блок-схем, показанных на чертежах, являются функциональными объектами и не обязательно должны соответствовать физически или логически независимым объектам. Эти функциональные объекты могут быть реализованы в форме программного обеспечения, в одном или в нескольких аппаратных модулях, в интегрированных схемах, в разных сетях и/или процессорах и/или микроконтроллерах.
[0038] Технологическая схема, показанная на чертежах, является лишь примерным описанием и не обязательно должна включать все этапы. Например, одни этапы могут быть разложены на более мелкие, в то время как другие - объединены частично или полностью, поэтому фактический порядок выполнения может изменяться в соответствии с реальной ситуацией.
[0039] С постоянным повышением уровня жизни людей роботы-подметальщики постепенно входят в дома обычных людей и становятся все более популярными. В скором ближайшем они станут незаменимым помощником по уборке в каждой семье подобно обычным бытовым приборам, таким как телевизоры и кондиционеры; они разовьются от текущего начального до более высокого уровня интеллекта, постепенно заменив ручную уборку; робот-подметальщик оснащен щеткой или шваброй для уборки пыли и грязи, но после уборки эту щетку или швабру необходимо очищать вручную, что неудобно и требует много времени.
[0040] На фиг. 1 показана блок-схема способа управления очисткой компонентов уборочного оборудовании в варианте реализации настоящего изобретения. Как показано на фиг. 1, способ управления очисткой компонентов уборочного оборудовании может включать следующие этапы:
[0041] S12. После того как уборочное оборудование в первом положении возвращается на зарядную станцию, уборочные компоненты на станции начинаю выполнять задачи по очистке компонентов уборочного оборудования.
[0042] В данном варианте реализации уборочным оборудованием может быть оборудование, предназначенное для выполнения работ по уборке дома, такое как роботы-подметальщики и пылесосы; уборочное оборудование может представлять собой интегрированного робота с функциями подметальщика и полотера, который может выполнять отдельно функцию подметания или отдельно функцию мытья полов, а также сразу две функции - подметания и мытья полов; первое положение - это когда робот лицевой частью обращен к зарядной станции; после того как робот возвращается на зарядную станцию в первом положении, уборочный элемент с функцией мытья полов попадает на очистку в промывочную емкость.
[0043] На фиг. 2 показано схематичное изображение формы уборочного оборудования в варианте реализации настоящего изобретения; как показано на фиг. 2, передняя сторона уборочного оборудования 21 является стороной, обращенной к зарядной станции при возврате на станцию в первом положении, задняя сторона уборочного оборудования 22 является стороной, обращенной к зарядной станции при возврате на станцию во втором положении; кроме формы, показанной на фиг. 2, уборочное оборудование в данном изобретении также может иметь круглую, овальную и другую форму, не ограниченную данным изобретением.
[0044] Зарядная станция представляет собой оборудование, которое предназначено для зарядки уборочного оборудования, а также может выполнять очистку уборочного оборудования и другие функции; на фиг. 3 схематично показана форма зарядной станции в варианте реализации настоящего изобретения; как показано на фиг. 3, зарядная станция включает в себя корпус 31 и входное отверстие 32, при этом корпус 31 снабжен уборочным компонентом, а входное отверстие 32 предназначается для входа уборочного оборудования на станцию; форма зарядной станции в этом изобретении может отличаться от формы, приведенной на фиг. 3, и быть прямоугольной, кубической, эллипсоидной и другой формой, не ограниченной данным изобретением. Уборочный компонент на зарядной станции представляет собой один или несколько модулей для очистки уборочного оборудования; он может включать насос для чистой воды, резервуар для чистой воды, насос для грязной воды, резервуар для грязной воды, промывочную емкость и т.д.; уборочные компоненты на уборочном оборудовании включают в себя подметальные щетки, валики для мытья полов и другие устройства, используемые в уборочном оборудовании для уборки внутри и снаружи помещений.
[0045] На фиг. 4 схематично показано уборочное оборудование после возврата на зарядную станцию в первом положении в одном из вариантов реализации настоящего изобретения; как показано на фиг. 4, после того, как корпус 43 уборочного оборудования в первом положении входит на станцию зарядки через входное отверстие в корпусе 41 зарядной станции, обратная сторона 45 корпуса 43 уборочного оборудования обращена наружу входа на зарядную станцию; после того как уборочное оборудование возвращается на станцию зарядки в первом положении, уборочный компонент на зарядной станции начинает выполнять очистку таких уборочных компонентов на уборочном оборудовании, как подметальные щетки и швабры; уборочное оборудование может связываться с зарядной станции через такие средства связи, как беспроводная сеть, в частности, инфракрасный коммуникационный модуль или Wi-Fi.
[0046] В одном из вариантов реализации настоящего изобретения после того, как уборочное оборудование возвращается на зарядную станцию в первом положении, оно не заряжается; во время уборки в помещении уборочное оборудование может возвращаться на зарядную станцию после уборки одного участка, чтобы помыть швабру, но на уборку этого участка может потребоваться всего 2 или 3 минуты; например, уборочное оборудование можно установить только на мытье пола, которое не требует большого расхода мощности, и после завершения задачи по мытью пола оборудование может быть заряжено на 80% и более и не требовать подзарядки, а требуется только очистка швабры и щетки. Это может в определенной степени уменьшить разряд батареи и продлить срок службы батареи уборочного оборудования. Конечно, чтобы избежать намокания ковра при уборке ковровой зоны, уборочное оборудование можно настроить так, чтобы на входе в зону ковра включался только режим подметания. Уборочное оборудование может определять тип напольного покрытия с помощью различных режимов обнаружения, и в соответствии с результатами обнаружения система управления активирует на уборочном оборудовании тот или иной режим уборки; например, для определения напольного покрытия и/или мест стыков разных напольных покрытий могут использоваться гироскоп, ультразвуковой датчик, датчик изменения тока или скорости вращения валиков на уборочном оборудовании.
[0047] В варианте реализации настоящего изобретения уборочное оборудование может возвращаться на зарядную станцию в первом положении следующим образом: уборочное оборудование с помощью технологии лазерного формирования обнаруживает заданный рисунок высокой яркости на зарядной станции или местоположение зарядной станции в соответствии с предустановленной картой и автоматически перемещается к передней части зарядной станции; затем в соответствии с обнаруженным заданным рисунком на зарядной станции угол наклона уборочного оборудования регулируется таким образом, чтобы уборочное оборудование могло войти на зарядную станцию в первом положении; в процессе перемещения на зарядную станцию уборочное оборудование с помощью датчика на корпусе определяет свое положение, и когда оно достигает заданного положения, моющие валики уборочного оборудования помещаются в резервуар с водой на зарядной станции.
[0048] В одном из вариантов реализации данного изобретения управление очисткой компонентов уборочного оборудования уборочными компонентами на зарядной станции может осуществляться контроллером на уборочном оборудовании или контроллером на зарядной станции.
[0049] В одном из вариантов реализации данного изобретения, если это реализуется контроллером на уборочном оборудовании, после того как уборочное оборудование входит на зарядную станцию в первом положении, контроллер на уборочном оборудовании посылает сигнал очистки, и зарядная станция запускает процесс очистки таких уборочных компонентов, как щетки и швабры уборочного оборудования.
[0050] В другом варианте реализации настоящего изобретения, если это реализуется контроллером на зарядной станции, после того как уборочное оборудование входит на зарядную станцию в первом положении, контроллер на зарядной станции запускает процесс очистки уборочных компонентов на уборочном оборудовании компонентами на зарядной станции.
[0051] Следует отметить, что все операции в этом изобретении, которые касаются выполнения определенных действий зарядной станцией или уборочным оборудованием, могут выполняться под управлением контроллера на уборочном оборудовании или контроллера на зарядной станции, либо под управлением обоих контролеров; конкретный способ реализации аналогичен описанному выше способу работы. Данное изобретение не ограничивает, какой именно способ контроля использовать в практическом применении.
[0052] В варианте реализации данного изобретения способ ввода уборочного оборудования на зарядную станцию в первом положении включает в себя обнаружение метки индикатора на зарядной станции с помощью датчика на уборочном устройстве, и ввод уборочного оборудования в заданное место зарядной станции в первом положении в соответствии с этой меткой.
[0053] В частности, перед тем как уборочное оборудование войдет на зарядную станцию в первом положении, оно перемещается к зарядной станции в первом положении, то есть передней стороной к зарядной станции. Когда уборочное оборудование находит зарядную станцию, оно сначала определяет расстояние и местоположение от зарядной станции и заранее начинает выравнивание. При этом операции нахождения зарядной станции, определения расстояния и выравнивания могут выполняться с помощью инфракрасного датчика расстояния; выравнивание может выполняться, когда оборудование находится на расстоянии 30-50 см от зарядной станции.
[0054] После выравнивания уборочное оборудование движется к зарядной станции с заданной скоростью, например 10 см/с, и когда от оборудования до станции остается определенное расстояние, например 25-30 см, скорость меняется, например на 20 см/с, и оборудование входит на зарядную станцию. В процессе входа на зарядную станцию настенный датчик распознает канавку на боковой перегородке зарядной станции и замедляет движение до определенной скорости, например 10 см/с; когда моющий валик на уборочном оборудовании располагается непосредственно над промывочной емкостью на зарядной станции, уборочное оборудование прекращает движение, и начинается обычный процесс очистки уборочным компонентом. Конечно, для направления уборочного оборудования к зарядной станции можно использовать и другие способы, такие как лазерные дальномеры (LDS), инфракрасная связь и т.д., здесь в этом отношении нет ограничений.
[0055] Если получен сигнал о том, что уборочному оборудованию не удалось вернуться на зарядную станцию, уборочное оборудование отходит назад на определенное расстояние, например 30-50 см, а затем возвращается на зарядную станцию с определенной скоростью, например 20 см/с. Если сигнал подключения, полученный при возврате на зарядную станцию 3-5 раз подряд, нестабилен, уборочное оборудование отключается, выполняется очистка зоны контакта с зарядным устройством или сообщается об ошибке.
[0056] В частности, когда уборочное оборудование находит зарядную станцию, если общее время возврата оборудования на станцию превышает заданное время возврата, текущий возврат на станцию отменяется, оборудование отходит назад на 30 см, снова находит зарядную станцию и выполняет возврат на станцию. Если оборудованию не удается вернуться на зарядную станцию 3-5 раз подряд, включается голосовое сообщение о том, что пользователю необходимо устранить препятствия рядом с зарядной станцией.
[0057] В одном из вариантов реализации настоящего изобретения датчик может быть настенным, он может обнаруживать канавку на боковой перегородке зарядной станции, и затем в соответствии с канавкой определять изменение расстояния; индикатором может быть канавка на зарядной станции, которая предназначается для индикации местоположения уборочного оборудования на зарядной станции, целевое положение -это положение, в которое должно попасть уборочное оборудование и в котором выполняется его очистка.
[0058] В одном из вариантов реализации настоящего изобретения уборочный компонент на зарядной станции выполняет задачу по очистке компонентов уборочного оборудования, в том числе операции по подаче воды, очистке уборочных компонентов, отжиму воды из уборочных компонентов уборочного оборудования, спуску воды, сливу грязной воды; при этом после очистки компонентов уборочного оборудования образуется грязная вода.
[0059] В частности, операция подачи воды означает, что водяной насос на зарядной станции подает воду из резервуара для чистой воды в промывочную емкость на зарядной станции, чтобы очищать уборочные компоненты на уборочном оборудовании; отжим воды означает осушение уборочных компонентов уборочного оборудования, удаление воды с помощью скребка и т.д. Цель - сделать так, чтобы компоненты уборочного оборудования после очистки не содержали слишком много воды, а не чтобы они были полностью сухими, чтобы вода не разливалась повсюду в процессе уборки помещения; отвод воды означает, что насос для грязной воды на зарядной станции возвращает грязную воду из промывочной емкости и вспомогательного бака обратно в емкость для грязной воды; упомянутая выше промывочная емкость предназначена для очистки моющих компонентов уборочного оборудования, вспомогательный бак размещен рядом с промывочной емкостью, в него попадает вода, которая выливается во время выжимания моющих компонентов; этот бак предотвращает попадание воды на пол по наклонной поверхности внизу зарядной станции.
[0060] В одном из вариантов реализации настоящего изобретения водяной насос на зарядной станции подает воду из резервуара для чистой воды в промывочную емкость для промывки уборочных компонентов уборочного оборудования, после промывки уборочные компоненты отжимаются, а затем насос для грязной воды на зарядной станции возвращает грязную воду из промывочной емкости и вспомогательного бака в резервуар для грязной воды.
[0061] В одном из вариантов реализации настоящего изобретения перед тем, как уборочный компонент начнет подачу воды, зарядная станция подает воду в промывочную емкость; уровень воды в резервуаре для чистой воды проверяется с помощью модуля контроля уровня воды; когда вода в резервуаре для чистой воды достигает предварительно заданного уровня, зарядная станция прекращает подачу воды. При этом модуль определения уровня воды может быть датчиком уровня воды; когда измеренный уровень воды в резервуаре для чистой воды достигает заданного значения, подача воды в резервуар для чистой воды прекращается.
[0062] В одном из вариантов реализации настоящего изобретения, когда уборочное оборудование возвращается на зарядную станцию и достигает целевого местоположения, резервуар для чистой воды начинает подачу воды для очистки уборочных компонентов на уборочном оборудовании. В процессе подачи воды можно регулировать вращение моющих валиков на уборочном оборудовании на заданной скорости, например 60 об/мин (60 оборотов в минуту), чтобы моющий валик увлажнялся. После заполнения промывочной емкости на зарядной станции резервуар для чистой воды прекращает подачу воды, и моющий валик начинает автоматический процесс уборки.
[0063] Автоматический процесс уборки можно настроить таким образом, чтобы моющий валик вращался в промывочной емкости с заданной скоростью, например 350 об/мин (350 оборотов в минуту), а также можно настроить его на вращение по часовой стрелке в течение определенного периода времени, например 15 секунд, а затем против часовой стрелки в течение определенного периода времени, например 15 секунд, а также можно установить время автоматической очистки, например 30 секунд. После завершения промывки из промывочной емкости сливается грязная вода.
[0064] В одном из вариантов реализации уборочные компоненты включают в себя резервуар для чистой воды, промывочную емкость и модуль контроля уровня воды, который отличается тем, что управляет подачей воды уборочным компонентом, в том числе: резервуар для чистой воды в уборочном узле подает воду, которая попадает в промывочную емкость; уровень воды в промывочной емкости измеряется с помощью модуля контроля уровня воды; когда вода в промывочной емкости достигает заданного уровня, подача воды прекращается.
[0065] В частности, для определения того, заполнена ли водой промывочная емкость на зарядной станции, может использоваться поплавок и датчики фотопрерывания. На фиг. 5 показано схематическое изображение контроля уровня воды в промывочной емкости в рамках настоящего изобретения. Как показано на фиг. 5, когда в промывочной емкости 51 нет воды, поплавок 53 висит в естественном состоянии, а оптический сигнал между датчиками фотопрерывания 55 блокируется балансиром 57 на конце поплавка 53. На фиг. 6 показано схематическое изображение контроля уровня воды в промывочной емкости в рамках настоящего изобретения. Как показано на фиг. 6, когда начинается подача чистой воды в промывочную емкость 61, поплавок 63 начинает всплывать; в это время балансир 67 на конце поплавка 63 опускается вниз, оптический сигнал между датчиками фотопрерывания 65 не блокируется, и подача воды продолжается; когда поплавок 63 поднимается до заданного положения, балансир 67 на конце поплавка снова блокирует оптический сигнал между датчиками фотопрерывания 65, указывая на то, что промывочная емкость 61 заполнена водой.
[0066] В частности, в процессе подачи воды может возникнуть проблема колебания поверхности воды, когда фактический уровень воды в промывочной емкости еще не достиг целевого значения, но из-за колебаний поверхности воды поплавок опускается и поднимается, в результате чего балансир на конце поплавка блокирует оптический сигнал между датчиками фотопрерывания, что приводит к проблеме преждевременной остановки подачи воды. Для решения этой проблемы можно установить определенный интервал времени, например 0,1 с, чтобы когда время прерывания сигнала превышает 0,1 с, подача воды в промывочную емкость прекращалась.
[0067] В одном из вариантов реализации изобретения уборочное оборудование отжимает воду из уборочных компонентов, что включает в себя следующее: уборочный компонент поднимается на заданную высоту так, чтобы уборочные компоненты были изолированы друг от друга; затем уборочный компонент вращается с заданной скоростью, освобождаясь от излишков воды. В частности, моющий валик уборочного оборудования вращается с определенной скоростью, например 1100 об/мин (1100 оборотов в минуту), и для отжима воды с него также может использоваться скребок. Конечно, также можно сделать так, чтобы после слива грязной воды из промывочной емкости уборочный компонент и скребок вращались в течение определенного времени, затем уборочный компонент поднимался и начинал вращаться с более высокой скоростью для освобождения от излишков воды.
[0068] В одном из вариантов реализации настоящего изобретения, когда уборочный компонент сливает грязную воду, это выполняется следующим образом: грязная вода сливается описанным выше способом и хранится в резервуаре для грязной воды.
[0069] В одном из вариантов реализации настоящего изобретения после завершения очистки резервуар для чистой воды также может подавать чистую воду для промывки промывочной емкости. После выполнения задачи по очистке уборочного оборудования возможна самоочистка промывочной емкости; в частности, резервуар для чистой воды может подавать воду в промывочную емкость для промывки потоком воды следов грязи на нижней и боковых стенках промывочной емкости, а затем грязная вода после самоочистки промывочной емкости сливается и хранится в резервуаре для грязной воды. В то же время в резервуаре для грязной воды с торца промывочной емкости также может быть водовыпускное отверстие, через которое на высокой скорости отводится жидкость, образуя завихрение в резервуаре для грязной воды. Способ промывки и слива грязной воды может заключаться как в одновременной промывке и сливе воды, так и в том, что сперва в течение определенного времени выполняется промывка, а затем вода сливается; конкретный способ самоочистки промывочной емкости в данном изобретении не ограничивается. С помощью самоочистки промывочной емкости можно дополнительно повысить степень автоматизации очистки уборочного оборудования, сократить время на ручные операции, повысить удобство использования уборочного оборудования.
[0070] S14. Если задача по очистке является последней в процессе текущей уборки, то после завершения задачи по очистке и слива воды уборочное оборудованием выводится с зарядной станции и вводится обратно на станцию во втором положении; при этом второе положение отличается от первого.
[0071] В варианте реализации настоящего изобретения, если задача по очистке не является последней в процессе текущей уборки, после завершения задачи по очистке уборочное оборудование приступает к следующей задаче по уборке помещения.
[0072] При этом задача по очистке означает процесс очистки компонентов уборочного оборудования с помощью уборочных компонентов на зарядной станции; процесс уборки означает процесс полной уборки уборочным оборудованием заданной области; например, если робот должен убрать гостиную, то указанный выше процесс уборки будет процессом уборки уборочным оборудованием всей гостиной; если уборочное оборудование должно убрать все помещение, то процесс уборки - это процесс полной уборки уборочным оборудованием всего помещения.
[0073] Последняя задача по очистке означает последнюю очистку уборочных компонентов уборочного оборудования в процессе уборки, то есть после завершения очистки уборочное оборудование больше не будет выполнять уборку помещения; следующая задача по уборке помещения означает задачу, в которой уборочное оборудование продолжает убирать участок, который не был убран в процессе уборки. Если уборочные компоненты уборочного оборудования чистятся не в последний раз, это означает, что процесс уборки не завершен, то есть все еще сохраняются неубранные зоны, которые предстоит убрать; затем, после завершения очистки уборочных компонентов уборочное оборудование переходит к следующей задаче по уборке помещений, то есть продолжает убирать участки, которые не были убраны.
[0074] В варианте реализации настоящего изобретения, если задача по очистке является последней задачей в процессе текущей уборки, после завершения задачи по очистке уборочное оборудование выходит с зарядной станции и снова возвращается на станцию во втором положении. Особые случаи, связанные с выходом уборочного оборудованием с зарядной станции, будут описаны ниже. При этом задачи по очистке, процесс уборки, последняя задача по очистке соответствуют описанным выше; второе положение означает, что задняя часть уборочного оборудования обращена вперед, то есть второе положение - это первое положение после поворота на 180 градусов.
[0075] В варианте реализации настоящего изобретения после завершения задачи по очистке уборочное оборудование переключается в режим подметания. Когда уборочное оборудование покидает зарядную станцию, и одометр ведущего колеса определяет, что ведущее колесо отошло назад на определенное расстояние, датчик лазерного дальномера на уборочном оборудовании определяет, завершил ли робот выход с зарядной станции.
[0076] На фиг. 7 схематично показано, как уборочное оборудование настоящего изобретения входит на станцию зарядки во втором положении; как показано на фиг. 7, корпус 73 уборочного оборудования входит в корпус 71 зарядной станции во втором положении через входное отверстие, передняя часть 75 корпуса 73 уборочного оборудования обращена наружу входа на зарядную станцию. Следует отметить, что вторым положением также могут быть другие положения, которые отличаются от первого положения, то есть положение входа на зарядную станцию не передней стороной вперед, это может быть положение под определенным углом, например, второе положение может быть положением уборочного оборудования при входе на зарядную станцию, повернутого передней частью на 30 градусов или 60 градусов; поэтому данная категория включает вход на зарядную станцию в любом положении, отличном от первого положения.
[0077] В одном из вариантов реализации уборочное оборудование перемещается к передней части зарядной станции в первом положении; при этом передняя часть зарядной станции является стороной, где находится входное отверстие, через которое уборочное оборудование попадает на станцию; если расстояние между уборочным оборудованием и зарядной станцией меньше заданного, уборочное оборудование перемещается к передней части зарядной станции во втором положении и возвращается на станцию.
[0078] В одном из вариантов реализации до того, как уборочное оборудование вернется на зарядную станцию во втором положении, оно сперва перемещается передней стороной к зарядной станции, то есть перемещается к зарядной станции в первом положении. В это время боковые щетки и основная щетка уборочного оборудования продолжают вращаться на скорости возврата на зарядку, то есть поддерживают заданную фиксированную скорость вращения.
[0079] Когда уборочное оборудование находит зарядную станцию, оно сначала определяет расстояние и местоположение от зарядной станции и заранее начинает выравнивание. При этом операции нахождения зарядной станции, определения расстояния и выравнивания могут выполняться с помощью инфракрасного датчика расстояния; выравнивание может выполняться, когда оборудование находится на определенном расстоянии от зарядной станции, например 30-50 см. После выравнивания уборочное оборудование с заданной скоростью, например 10 см/с, перемещается на определенное расстояние перед зарядной станцией, например 25-30 см, для разворота на 180 градусов, так, чтобы задняя часть уборочного оборудования была обращена к зарядной станции. Развернувшись, оборудование возвращается на зарядную станцию с заданной скоростью, например 20 см/с.
[0080] В процессе возврата на зарядную станцию настенный датчик распознает канавку на боковой перегородке зарядной станции и замедляет движение до определенной скорости, например 10 см/с; после получения от зарядной станции сигнала о том, что зарядные контакты на зарядной станции соединились с зарядными контактами с обеих сторон уборочного оборудования, уборочное оборудование прекращает движение и ожидает получения следующей команды.
[0081] После получения сигнала о том, что соединение между зарядными контактами на зарядной станции и зарядными контактами с обеих сторон уборочного оборудования является стабильным, активируется модуль зарядки и начинается обычный процесс зарядки. Если получен сигнал о том, что соединение между зарядными контактами на зарядной станции и зарядными контактами с обеих сторон уборочного оборудования нестабилен, уборочное оборудование перемещается вперед на определенное расстояние, например 30-50 см, а затем снова возвращается на станцию с определенной скоростью, например 20 см/с, то есть уборочное оборудование сперва выходит со станции, а затем снова возвращается на станцию так, чтобы зарядные контакты могли хорошо состыковаться. Если сигнал подключения, полученный при возврате к зарядной станции 3-5 раз подряд, нестабилен, уборочное оборудование отключается, выполняется очистка зоны контакта с зарядным устройством или сообщается об ошибке.
[0082] В варианте реализации настоящего изобретения, если уборочное устройство не может вернуться на станцию в течение заданного времени, оно транслирует голосовое сообщение об ошибке. Когда уборочное оборудование находит зарядную станцию, если общее время возврата оборудования на станцию превышает заданное время возврата, текущий возврат на станцию отменяется, оборудование отходит назад на определенное расстояние, например 30 см, снова находит зарядную станцию и выполняет возврат. Если оборудованию не удается вернуться к зарядной станции 3-5 раз подряд, включается голосовое сообщение о том, что пользователю необходимо устранить препятствия рядом с зарядной станцией.
[0083] В варианте реализации изобретения зарядная станция включает в себя зарядный модуль, уборочное оборудование перемещается к передней части зарядной станции во втором положении, а после возврата на станцию модуль получает информацию о заряде уборочного оборудования; если заряд ниже заданного предельного значения, зарядный модуль выполняет зарядку уборочного оборудования. На фиг. 8 показано схематическое изображение зарядки уборочного оборудования в рамках настоящего изобретения. Как показано на фиг. 8, после того, как уборочное оборудование возвращается на зарядную станцию во втором положении, а зарядные контакты уборочного оборудования соединяются с зарядными контактами на станции, как показано на фиг. 81 и 83, начинается зарядка уборочного оборудования.
[0084] В варианте реализации настоящего изобретения, если во время выполнения уборки обнаруживается, что уборочное оборудование почти разряжено, например, осталось менее 10% или 20% заряда, уборочное оборудование возвращается на зарядную станцию во втором положении для зарядки. При этом предельное значение заряда для возврата на зарядную станцию для зарядки можно установить в соответствии с фактической ситуацией, чтобы избежать ситуации, когда уборочное оборудование при уборке помещения или других мест разрядилось и не может продолжать работать или не может вернуться на зарядную станцию. Конечно, перед зарядкой уборочное оборудование также может сначала очистить уборочные компоненты, а после очистки войти на зарядную станцию во втором положении для зарядки; это позволит избежать скопления мусора на уборочных компонентах из-за того, что они не были очищены вовремя, и последующих проблем с очисткой.
[0085] В варианте реализации изобретения после того, как уборочное оборудование возвращается на зарядную станцию во втором положении, на нем проверяется оставшийся заряд, и если заряд ниже заданного предельного значения, зарядная станция начинает зарядку оборудования. Например, когда уборочное оборудование выполняет задачу по уборке дома и завершает уборку, а затем возвращается на зарядную станцию во втором положении, если оставшийся заряд уборочного оборудования превышает 90%, зарядка не производится; если заряда меньше 90%, выполняется зарядка. Такой способ в определенной степени защищает батареи уборочного оборудования и продлевает срок их службы. В процессе зарядки система управления также может оценивать и рассчитывать оставшийся заряд уборочного оборудования на основе сохраненной карты и оставшейся площади уборки; если оставшегося заряда достаточно для уборки оставшейся площади, оборудование выходит со станции и выполняет задачи по уборке, что улучшает эффективность уборки.
[0086] В одном из вариантов реализации пользователь может вручную настроить действия уборочного оборудования через мобильный терминал, который взаимодействует с уборочным оборудованием посредством беспроводной связи; мобильным терминалом может быть пульт дистанционного управления или программа управления, установленная на смартфоне. В частности, с мобильного терминала можно вручную ввести такие настройки, как расписание уборки, время возврата на зарядную станцию для зарядки, время начала уборки, время возврата на станцию для пополнения запасов воды, время возврата на станцию для очистки уборочных компонентов и пр.
[0087] Как правило, во время уборки контроллер проверяет заряд в батарее, установленной на уборочном оборудовании, и когда в соответствии с заданными параметрами заряд падает ниже определенного уровня (например, 10%), уборка прекращается, и оборудование возвращается на зарядную станцию на зарядку; когда уровень заряда возрастает до определенного значения (например, 95%), оборудование покидает станцию и возвращается в то место и положение, где оно было до прекращения предыдущей уборки, и продолжает уборку; конечно, на более интеллектуальном оборудовании контроллер может с помощью карты рассчитывать как уже убранную площадь, так и оставшуюся площадь, а также рассчитывать приблизительный расход мощности для уборки оставшейся площади, а затем зарядить оборудование до уровня, необходимого для завершения уборки оставшейся площади и возврата на зарядную станцию, реализуя интеллектуальную функцию прерывания и продолжения уборки.
[0088] Однако, чтобы удовлетворить больше индивидуальных потребностей пользователей в уборочном оборудовании, а также чтобы определенное оборудование не имело вышеупомянутой интеллектуальной функции прерывания и продолжения уборки, на мобильном терминале можно установить соответствующие параметры. Например, пользователь может с мобильного терминала установить дату и время запланированной уборки, и когда заданное время наступит, уборочное оборудование выполнит уборку; пользователь может установить оставшийся уровень заряда для первого возврата на зарядку, и когда оставшийся заряд уборочного оборудования опустится до установленного значения, оборудование вернется на зарядку; пользователь может установить уровень заряда при первом возврате на зарядку, и когда заряд уборочного оборудования достигнет установленного значения, зарядка прекращается, и оборудование продолжает уборку, вернувшись на прежнее место, откуда оно вернулось на зарядку; пользователь может установить оставшийся уровень заряда для возврата на вторую зарядку, и когда заряд оборудования падает ниже установленного пользователем уровня, оборудование возвращается на вторую зарядку; пользователь может установить уровень заряда второй зарядки, когда заряд уборочного оборудования достигает установленного пользователем, зарядка прекращается, и продолжается уборка, и так далее. Конечно, пользователь также может установить оставшийся уровень заряда и уровень подзарядки для каждой подзарядки или установить оставшийся заряд и уровень подзарядки на уборочном оборудовании по умолчанию.
[0089] Чтобы избежать повреждения батареи из-за того, что она постоянно находится в полностью заряженном состоянии в течение длительного времени, управление зарядкой можно объединить с уборкой по расписанию; контроллер определяет входную мощность адаптера при зарядке уборочного оборудования и вычисляет время зарядки от текущего уровня заряда на момент возврата на зарядку до достижения установленного пользователем уровня заряда, например: текущий заряд составляет 5%, а пользователь установил уровень заряда как 80%, расчетное время зарядки составляет 3 часа, и пользователь установил время уборки по расписанию на 10:00, в этом случае система управления подаст команду на микросхему источника питания начать зарядку в 7:00, и в 10:00 начнет запланированную уборку. Конечно, уборочное оборудование также может вернуться на станцию на зарядку сразу после завершения уборки, и прекратить зарядку, когда уровень заряда достигнет установленного пользователем, а когда настанет время запланированной уборки, начать уборку.
[0090] Кроме того, что пользователь может вручную установить время уборки по расписанию и уровень заряда, когда уборочное оборудование моет полы, можно вручную установить время мытья полов по расписанию, время промывки тряпки, время возврата на станцию для пополнения запасов воды, объем пополнения воды и другие параметры, например: оборудование в 10:00 покидает станцию и начинает мытье полов по расписанию, время уборки составляет 10 минут, после чего необходима промывка тряпки, когда объем воды в промывочной емкости уменьшается до определенного уровня, оборудование возвращается на станцию за водой, и когда вода пополняется до определенного уровня, питание отключается, и продолжается уборка.
[0091] В варианте реализации настоящего изобретения, на фиг. 9 схематично показаны зарядные контакты зарядной станции. Как показано на фиг. 9, зарядные контакты 91 и 93 на зарядной станции расположены на левой боковой перегородке 95 и на правой боковой перегородке 97 зарядной станции. На фиг. 10 схематично показан вид сбоку уборочного оборудования в соответствии с вариантом реализации настоящего изобретения; как показано на фиг. 10, левая сторона уборочного оборудования 101 и правая сторона уборочного оборудования 103 являются видами сбоку с обеих сторон уборочного оборудования, зарядный контакт 105 уборочного оборудования находится на левой стороне 101 уборочного оборудования, а зарядный контакт 107 - на правой стороне 103 уборочного оборудования. За зарядным контактом 91 и зарядным контактом 93 зарядной станции, показанной на фиг. 9, добавлены магниты, за зарядными контактами 105 и 107 с обеих сторон уборочного оборудования добавлены магнитные металлические детали.
[0092] В варианте реализации изобретения, когда уборочное оборудование возвращается на зарядную станцию во втором положении, после того как зарядные контакты зарядной станции и уборочного оборудования приблизятся друг к другу, магниты притягивают к себе магнитные металлические детали, зарядные контакты с обеих сторон уборочного оборудования соединяются с зарядными контактами на боковых перегородках с обеих сторон зарядной станции, и зарядная станция начинает зарядку уборочного оборудования. Таким образом, когда зарядка не выполняется, зарядные контакты на зарядной станции плотно прижимаются к магниту, и когда уборочное оборудование входит на станцию или покидает ее, трения не возникает, а когда выполняется очистка уборочных компонентов уборочного оборудования, предотвращается попадание грязной воды на зарядные контакты, таким образом, способ зарядки, предусмотренный в данном изобретении, предотвращает загрязнение и электрическую коррозию зарядных контактов, а также предотвращает царапание основного устройства с обеих сторон и ухудшение его внешнего вида; использование магнитов увеличивает силу контакта между зарядными контактами на зарядной станции и зарядными контактами с обеих сторон уборочного оборудования, позволяя уборочному оборудованию нормально заряжаться.
[0093] Понятно, что в этой конфигурации зарядные контакты располагаются как можно дальше от промывочной емкости, чтобы избежать их загрязнения и повреждения грязной водой после уборки; в некоторых вариантах реализации зарядные контакты могут размещаться на уборочном оборудовании и на зарядной станции другими разумными способами с принятием необходимых мер по герметизации для достижения того же или схожего технического эффекта, никаких конкретных ограничений здесь не предусмотрено.
[0094] В одном из вариантов реализации настоящего изобретения, после того как уборочное оборудование возвращается на станцию во втором положении, также предусмотрено следующее: на зарядной станции включается вытяжной модуль для откачки воздуха с целью сушки уборочных компонентов. Вентилятор расположен в нижней части зарядной станции, непосредственно под уборочным оборудованием; выпускное отверстие расположено в передней части зарядной станции, напротив места, где находится моющий валик уборочного оборудования в состоянии зарядки; когда уборочное оборудование находится в состоянии зарядки, на зарядной станции включается вентилятор, который высушивает моющий валик уборочного оборудования. Когда уборочное оборудование не находится в состоянии зарядки, на зарядной станции также можно включить вентилятор для сушки моющего валика уборочного оборудования. Например, после того, как уборочное оборудование возвращается на зарядную станцию во втором положении, включается вентилятор для сушки моющего валика уборочного оборудования; при этом не учитывается, находится ли уборочное оборудование в состоянии зарядки.
[0095] Кроме того, в этом примере реализации также предусмотрено устройство управления очисткой компонентов уборочного оборудования.
[0096] На фиг. 11 показана блок-схема устройства управления 110 очисткой уборочных компонентов уборочного оборудовании в варианте реализации настоящего изобретения. Как показано на фиг. 11, устройство управления 110 очисткой компонентов уборочного оборудования согласно варианту реализации может включать в себя модуль управления 111 в первом положении и модуль управления 113 во втором положении.
[0097] В частности, модуль управления 111 в первом положении может использоваться для следующего: когда уборочное оборудование в первом положении возвращается на зарядную станцию, уборочные компоненты на зарядной станции начинают выполнять задачи по очистке компонентов на уборочном оборудовании; модуль управления 113 во втором положении может использоваться для следующего: если задача по очистке является последней в процессе текущей уборки, после выполнения задачи по очистке уборочное оборудование выходит с зарядной станции и снова возвращается на зарядную станцию во втором положении; при этом первое и второе положения отличаются друг от друга.
[0098] В одном из вариантов реализации настоящего изобретения модуль управления 111 в первом положении может быть настроен на выполнение следующих задач: обнаружение индикатора на зарядной станции с помощью датчика на уборочном оборудовании; индикатор указывает на положение уборочного оборудования на зарядной станции; индикатор используется для перемещения уборочного оборудования в первом положении в заданное положение на зарядной станции.
[0099] В одном из вариантов реализации настоящего изобретения модуль управления 111 в первом положении может быть настроен на выполнение следующих задач: подача воды уборочным компонентом, очистка уборочных компонентов, отжим воды с уборочных компонентов на уборочном оборудовании, слив воды из уборочного компонента, слив грязной воды, при этом после очистки уборочных компонентов образуется грязная вода.
[00100] В одном из вариантов реализации настоящего изобретения модуль управления 111 в первом положении может быть настроен на выполнение следующих задач: подача чистой воды из резервуара для чистой воды, подача воды в промывочную емкость, контроль уровня воды в промывочной емкости с помощью модуля контроля уровня воды; когда обнаруживается, что вода в промывочной емкости достигает заданного уровня, подача воды прекращается.
[00101] В одном из вариантов реализации настоящего изобретения модуль управления 111 в первом положении может быть настроен на выполнение следующих задач: подъем уборочного компонента на заданную высоту, чтобы уборочные компоненты были отделены друг от друга; вращение уборочного компонента с заданной скоростью для освобождения от излишков воды, или вращение уборочного компонента после слива грязной воды для избавления от излишков воды, а затем подъем уборочного компонента с другого уборочного компонента для сушки.
[00102] В одном из вариантов реализации настоящего изобретения модуль управления 111 в первом положении может быть настроен на выполнение следующих задач: слив грязной воды из уборочного компонента и ее хранение в резервуаре для грязной воды.
[00103] В одном из вариантов реализации настоящего изобретения модуль управления 111 в первом положении может быть настроен на выполнение следующих задач: подача воды из резервуара для чистой воды для промывки промывочной емкости.
[00104] В одном из вариантов реализации настоящего изобретения модуль управления 111 в первом положении может быть настроен на выполнение следующих задач: если задача по очистке не является последней в процессе текущей уборки, после завершения задачи по очистке уборочное оборудование приступает к следующей задаче по уборке помещения.
[00105] В одном из вариантов реализации модуль управления 113 во втором положении может быть настроен на выполнение следующих задач: уборочное оборудование перемещается к передней части зарядной станции в первом положении; при этом передняя часть зарядной станции является стороной, где находится входное отверстие, через которое уборочное оборудование попадает на станцию; если расстояние между уборочным оборудованием и зарядной станцией меньше заданного, уборочное оборудование перемещается к передней части зарядной станции во втором положении и возвращается на станцию.
[00106] В одном из вариантов реализации настоящего изобретения модуль управления 113 во втором положении может быть настроен на выполнение следующих задач: если уборочное оборудование в течение заданного периода времени не может вернуться на зарядную станцию, оно транслирует голосовое сообщение об ошибке.
[00107] В одном из вариантов реализации настоящего изобретения модуль управления 113 во втором положении может быть настроен на выполнение следующих задач: получение информации об уровне заряда уборочного оборудования; если уровень заряда ниже заданного предельного значения, модуль зарядки начинает зарядку уборочного оборудования.
[00108] В одном из вариантов реализации настоящего изобретения модуль управления 113 во втором положении может быть настроен на выполнение следующих задач: сушка уборочного компонента с помощью вытяжного модуля.
[00109] В варианте реализации настоящего изобретения также предусмотрен машиночитаемый носитель информации, на котором хранится программа, предназначенная для выполнения описанных здесь задач. В некоторых возможных вариантах реализации различные аспекты настоящего изобретения также могут быть реализованы в виде программы, которая включает программный код; когда программа запущена на оконечном устройстве, программный код позволяет оконечному устройству выполнять шаги, описанные в "варианте реализации" в соответствии с различными вариантами реализации настоящего изобретения.
[00110] Программа, используемая для выполнения вышеуказанных задач согласно вариантам реализации изобретения, может храниться на портативном постоянном ЗУ на компакт-диске (CD-ROM) и включать программный код, и может быть запущена на оконечном устройстве, таком как персональный компьютер. Однако программа в данном изобретении не ограничивается; в этой заявке читаемым носителем информации может быть любой материальный носитель, на котором содержится или хранится программа, которая может использоваться системой, устройством или компонентом для выполнения команд или их комбинацией.
[00111] Программа может храниться на одном читаемом носителе или на любой комбинации нескольких носителей. Считываемый носитель может быть считываемым носителем сигнала или считываемым носителем информации. Например, считываемый носитель информации может представлять собой, без ограничений, электрическую, магнитную, оптическую, электромагнитную, инфракрасную или полупроводниковую систему, устройство или компонент, или любую их комбинацию. Более конкретные примеры считываемых носителей информации (неполный список) включают: электрические соединения с помощью одного или нескольких проводов, портативные диски, жесткие диски, запоминающее устройство с произвольным доступом (ЗУПД), постоянное ЗУ (ПЗУ), стираемое ПЗУ (EPROM или флэш-память), оптические диски, портативное ПЗУ на компакт-диске (CD-ROM), оптические и магнитные запоминающие устройства или любая подходящая их комбинация.
[00112] Машиночитаемый носитель сигнала может включать в себя сигнал, распространяемый в основной полосе частот или как часть несущей частоты, которая несет считываемый программный код. Этот распространяемый сигнал может иметь множество форм, включая, без ограничений, электромагнитные сигналы, оптические сигналы или любую подходящую их комбинацию. Считываемый носитель сигнала также может быть любым считываемым носителем, отличным от считываемого носителя информации, который может передавать, распространять или отправлять программы, используемые системой, устройством или компонентом для выполнения команд или их комбинацией.
[00113] Программный код, содержащийся на считываемом носителе, может передаваться с помощью любого подходящего носителя, включая, без ограничений, беспроводной, проводной, оптический, радиочастотный кабель и т.д. или любую подходящую их комбинацию.
[00114] Написать программный код для выполнения операций в данном изобретении можно на любой комбинации одного или нескольких языков программирования, включая объектно-ориентированные языки программирования, такие как Java, С++ и т.д., а также обычные процедурные языки программирования, такие как язык "С" или аналогичные им. Программный код может быть полностью выполнен на вычислительном устройстве пользователя, частично выполнен на устройстве пользователя, выполнен как независимый программный пакет, частично выполнен на вычислительном устройстве пользователя, а частично на удаленном вычислительном устройстве или полностью на удаленном вычислительном устройстве или сервере. В случае удаленного вычислительного оборудования оно может быть подключено к вычислительному оборудованию пользователя через любой вид сети, включая локальную сеть (LAN) или глобальную сеть (WAN), или может быть подключено к внешнему вычислительному устройству (например, с помощью интернет-провайдера при подключении через интернет).
[00115] В варианте реализации настоящего изобретения также предусмотрено электронное оборудование для выполнения описанных выше задач.
[00116] Технический персонал в данной технической области сможет понять, что все аспекты этого изобретения могут быть реализованы в виде систем, способов или программ. Поэтому разные аспекты настоящего изобретения могут быть конкретно реализованы в следующих формах, а именно: полное аппаратное воплощение, полное программное воплощение (включая встроенное ПО, микрокод и т.д.) или комбинация аппаратного и программного воплощений, которые здесь могут совместно именоваться "схема", "модуль" или "система".
[00117] Описание электронного оборудования 1200 в соответствии с этим вариантом реализации настоящего изобретения показано на фиг. 12. Электронное оборудование 1200, показанное на фиг. 12, является лишь примером и не должно налагать никаких ограничений на функции и сферу применения варианта реализации данного изобретения.
[00118] Как показано на фиг. 12, электронное оборудование 1200 представлено в виде универсального вычислительного устройства. Компоненты электронного оборудования 1200 могут включать в себя, без ограничений, по меньшей мере один процессор 1210, по меньшей мере один модуль памяти 1220, шину 1230, соединяющую различные компоненты системы (включая модуль памяти 1220 и процессор 1210), и блок отображения 1240.
[00119] Модуль памяти 1220 может включать в себя считываемый носитель в виде энергозависимого блока памяти, такого как запоминающее устройство с произвольным доступом (ЗУПД) 12201 и/или кэш-память 12202, и может дополнительно включать в себя постоянное запоминающее устройство (ПЗУ) 12203.
[00120] Модуль памяти 1220 может также включать в себя программу/служебную программу 12204, имеющую набор (по меньшей мере, один) программных модулей 12205, такие программные модули 12205 включают в себя, без ограничений, операционную систему, одно или более приложений, другие программные модули и программные данные, каждый из которых или их комбинация в этих вариантах реализации может включать в себя реализацию сетевой среды.
[00121] Шина 1230 может быть шиной со структурой одного или нескольких типов, включая шину модуля памяти или контроллер запоминающего устройства, периферийную шину, ускоренный графический порт, процессор или локальную шину с любой из множества структур.
[00122] Электронное оборудование 1200 может также взаимодействовать с одним или несколькими внешними устройствами 1300 (такими как клавиатуры, сенсорные устройства, устройства Bluetooth и т.д.), а также с одним или несколькими устройствами связи, которые позволяют пользователю взаимодействовать с электронным устройством 1200, и/или с любым устройством, которое позволяет электронному устройству 1200 взаимодействовать с одним или несколькими другими вычислительными устройствами (такими как маршрутизаторы, модемы и т.д.). Эта связь может осуществляться через интерфейс ввода-вывода (I/O) 1250. Более того, электронное оборудование 1200 может также осуществлять связь с одной или несколькими сетями (такими как локальная сеть (LAN), глобальная сеть (WAN) и/или сеть общего пользования, такая как Интернет) через сетевой адаптер 1260. Как показано на рисунке, сетевой адаптер 1260 взаимодействует с другими модулями электронного оборудования 1200 через шину 1230. Следует понимать, что, хотя это и не показано на рисунке, с электронным оборудованием 1200 могут использоваться и другие аппаратные и/или программные модули, включая, без ограничений, микрокод, драйверы устройств, резервные процессоры, массивы внешних дисков, RAID-системы, ленточные накопители и системы резервного хранения данных.
[00123] В варианте реализации изобретения также предусмотрен способ управления уборочной системой, при этом уборочная система включает в себя уборочное оборудование и зарядную станцию. В качестве примера, в такой уборочной системе уборочное оборудование может быть уборочным оборудованием, описанным в любом из вариантов реализации, а зарядная станция может быть зарядной станцией, описанной в любом из вариантов реализации. Следовательно, специалисты в данной области могут легко представить, что конкретные конфигурации уборочного оборудования и/или зарядной станции в любом из вышеуказанных вариантов реализации также могут быть в равной степени применены к соответствующему уборочному оборудованию и/или зарядной станции в уборочной системе, которая будет описана ниже. Конечно, следует также отметить, что в других вариантах реализации настоящего изобретения уборочное оборудование и зарядная станция в уборочной системе также могут отличаться от указанных в вариантах реализации выше.
[00124] На фиг. 13 показано схематическое изображение сценария применения уборочной системы, описанной в варианте реализации настоящего изобретения. Как показано на фиг. 13, данная уборочная система 10 включает в себя зарядную станцию 11 и уборочное оборудование 13, уборочное оборудование 13 может входить на зарядную станцию 11 или покидать ее по наклонной направляющей 12, расположенной на зарядной станции 11. После того как уборочное оборудование 13 покидает зарядную станцию 11 по направляющей 12, оно начинает уборку пола в специально отведенном месте (например, в помещении). После того как уборочное оборудование 13 возвращается на зарядную станцию 11 по направляющей 12, оно может заряжаться, собирать пыль и производить другие действия по обслуживанию на зарядной станции 11. На фиг. 13 отдельно показаны соответственно состояние S, когда уборочное оборудование 13 заряжается на зарядной станции, и состояние S', когда уборочное оборудование 13 выполняет обслуживание на зарядной станции 11. Вышеупомянутый процесс может выполняться автоматически без участия человека; вариант реализации изобретения обеспечивает способ управления вышеупомянутым процессом на случай особых обстоятельств, делая уборочную систему 10 более надежной и умной.
[00125] Легко понять, что в примере, показанном на фиг. 13, уборочная система 10 показана в виде робота-подметальщика, но способ управления уборочной системой в этом варианте реализации также может быть применен к любой другой ситуации с уборочной системой.
[00126] На фиг. 14 показана технологическая схема способа управления 200 в уборочной системе в варианте реализации настоящего изобретения. Как показано на фиг. 14, способ управления 200 уборочной системой включает в себя следующие этапы:
[00127] На этапе S210 определяется текущее рабочее состояние уборочного оборудования.
[00128] На этапе S220, когда определено, что уборочное оборудование находится в предварительно заданном рабочем состоянии, определяется относительное положение между уборочным оборудованием и зарядной станцией.
[00129] На этапе S230 в соответствии с определенным ранее относительным положением ведущее колесо уборочного оборудования приводится в движение, и уборочное оборудование начинает двигаться относительно зарядной станции или остается на зарядной станции.
[00130] В частности, на этапе S210 сперва определяется текущее рабочее состояние уборочного оборудования. Согласно варианту реализации, если уборочное оборудование находится, по меньшей мере, в одном из следующих рабочих состояний, считается, что оно находится в заданном рабочем состоянии: мусор из пылесборника уборочного оборудования собирается в пылесборник на зарядной станции, или уборочные компоненты на зарядной станции очищают уборочные компоненты на уборочном оборудовании, или зарядная станция заряжает уборочное оборудование.
[00131] Уборочная система может использовать соответствующую ей зарядную станцию для очистки моющих валиков, установленных на уборочном оборудовании. В процессе очистки моющий валик должен вращаться с высокой скоростью и касаться выпуклости на зарядной станции для достижения эффекта очистки. Во время очистки вращающегося на высокой скорости моющего валика из-за вибрации машины и ответной реакции выпуклости на зарядной станции уборочное оборудование отходит от заданного места, а в серьезных случаях может соскользнуть с зарядной станции. Это приведет к тому, что валик не сможет эффективно контактировать с выпуклостью или чистящим скребком на зарядной станции, и эффект очистки не будет достигнут.
[00132] На этапе S220, если определено, что уборочное оборудование находится в заданном рабочем состоянии, описанном выше, дополнительно определяется относительное положение между уборочным оборудованием и зарядной станцией, чтобы определить степень удаленности уборочного оборудования от зарядной станции, это упростит поддержание устойчивого положения уборочного оборудования во время очистки на зарядной станции без соскальзывания.
[00133] На этапе S230 к ведущему колесу уборочного оборудования в соответствии с относительным положением прикладывается движущая сила. В конкретном варианте реализации можно управлять движением уборочного оборудования в соответствии со степенью его отклонения от указанного места на зарядной станции, например, в зависимости от расстоянии от заданного места.
[00134] В варианте реализации управление движением уборочного оборудования осуществляется на основе текущего рабочего состояния уборочного оборудования и относительного положения между уборочным оборудованием и зарядной станцией, а в случае особых обстоятельств и аварийных ситуаций движение уборочного оборудования корректируется, что обеспечивает более надежное и интеллектуальное управление, повышая удобство для пользователя.
[00135] Согласно варианту реализации, приведение в движение ведущего колеса уборочного оборудования в соответствии с относительным положением может включать в себя следующее: в случае перемещения уборочного оборудования к назначенному месту на зарядной станции ведущее колесо приводится в движение вдоль направления движения уборочного оборудования. Движущая сила - это сила, способная компенсировать уход уборочного оборудования в сторону от зарядной станции. Когда уборочное оборудование находится в заданном месте, к ведущему колесу уборочного оборудования продолжает прикладываться движущая сила с меньшим рабочим циклом, так что ведущее колесо сохраняет тенденцию движения вперед; в это время, поскольку уборочное оборудование уже находится в заданном месте, оно должно оставаться неподвижным относительно зарядной станции, и движущая сила не позволяет уборочному оборудованию скользить по наклонной поверхности зарядной станции под действием силы тяжести, или компенсирует реакцию уборочного оборудования во время очистки или сбора пыли на базовой станции, в результате которой оборудование может отклоняться от заданного положения.
[00136] Кроме того, согласно варианту реализации, перед тем как уборочное оборудование достигнет заданного места на зарядной станции, к ведущему колесу уборочного оборудования прикладывается движущая сила на начальной скорости в направлении движения уборочного устройства к зарядной станции. В процессе возврата уборочного оборудования на зарядную станцию ведущее колесо перемещается с начальной скоростью, которая может быть нормальной скоростью, выше или ниже нормальной скорости перемещения.
[00137] Кроме того, согласно варианту реализации, перед тем как уборочное оборудование достигнет заданного места на зарядной станции, к ведущему колесу уборочного оборудования прикладывается движущая сила на второй скорости в направлении движения уборочного устройства к зарядной станции. Вторая скорость - это скорость, скорректированная на основе заданного алгоритма.
[00138] На фиг. 15 показано схематическое изображение управления уборочным оборудованием, когда оно стабильно находится в заданном месте на зарядной станции в варианте реализации настоящего изобретения; последующее описание будет основываться на фиг. 15.
[00139] В этом варианте реализации уборочное оборудование может взаимодействовать с зарядной станцией различными способами, например, собирать мусор из пылесборника уборочного оборудования в большой пылесборник на зарядной станции, или уборочный компонент на зарядной станции может очищать моющий валик или тряпку на уборочном оборудовании. В процессе такого взаимодействия уборочное оборудование под действием силы тяжести отходит от зарядной станции и оптимального места взаимодействия. Как показано на фиг. 15, зарядная станция 151 имеет наклонную направляющую 152, и уборочное оборудование 153 перемещается по направляющей 152 к заданному месту на зарядной станции 151. В процессе вышеуказанного взаимодействия может создаваться сила N, направленная в сторону отталкивания уборочного оборудования 153 от зарядной станции 151, что может привести к тому, что уборочное оборудование 153 покинет заданное место на зарядной станции 31, тем самым воздействуя на описанный выше процесс взаимодействия.
[00140] В некоторых вариантах реализации для управления перемещением уборочного оборудования 153 может использоваться способ непрерывного управления. В частности, как только уборочное устройство 153 достигает заданного места на зарядной станции 151, к ведущему колесу уборочного оборудования 153 продолжает прикладываться сила с меньшим рабочим циклом до завершения взаимодействия для компенсации воздействия силы N.
[00141] Этот способ позволяет эффективно сохранять положение уборочного оборудования, но поскольку колесо непрерывно приводится в движение с более низким рабочим циклом, это не подходит для непрерывного приложения силы в случаях, отличных от специально указанных рабочих состояний; когда уборочное оборудование остается на зарядной станции и не находится в определенном рабочем состоянии, пользователю иногда необходимо вытягивать уборочное оборудование с зарядной станции; если в это время ведущее колесо все еще имеет тенденцию двигаться вперед, это затруднит операцию вытягивания пользователем.
[00142] В некоторых вариантах реализации для управления перемещением уборочного оборудования 153 может использоваться стационарный способ. В частности, в начале взаимодействия к двигателю ведущего колеса уборочного оборудования 153 сначала прикладывается сила с более высоким рабочим циклом, так что уборочное оборудование 153 перемещается к заданному месту или обратно. Затем с течением времени рабочий цикл приложения силы уменьшается до более низкого, достаточного для компенсации воздействия силы N, так что уборочное оборудование 153 может оставаться в заданном месте на зарядной станции 151.
[00143] Таким образом, поскольку для управления двигателем ведущего колеса уборочного оборудования в начале используется более высокий рабочий цикл, уборочное оборудование быстро перемещается к месту отклонения от заданного положения или обратно, но в то же время из-за высокой скорости это может привести к ударам уборочного оборудования о зарядную станцию, истиранию краев уборочного оборудования и поверхности зарядной станции, а также может привести к износу колес уборочного оборудования.
[00144] В некоторых вариантах реализации для управления перемещением уборочного оборудования 153 может использоваться способ управления с обратной связью. В частности, сначала определяют два состояния, состояние "на месте" и состояние "не на месте", и применяют разные режимы управления. Состояние "на месте" означает, что уборочное оборудование 153 находится в заданном месте на зарядной станции 151. Когда уборочное оборудование 153 достигает заданного места, приводной двигатель колеса уборочного оборудования 153 работает с меньшим рабочим циклом, достаточным для компенсации воздействия силы N. В состоянии "не на месте", то есть в состоянии, противоположном вышеупомянутому состоянию "на месте", приводной двигатель колеса уборочного оборудования 153 работает под управлением ПИД-регулятора. В некоторых вариантах реализации для лучшего управления, когда уборочное оборудование 153 переходит из состояния "не на месте" в состояние "на месте", к уборочному оборудованию 153 можно применять управление в состоянии "не на месте" в течение короткого периода времени (например, 1 с).
[00145] В конкретном варианте реализации для определения того, находится ли оборудование "на месте" или "не на месте", может использоваться датчик, например: когда уборочное оборудование 153 достигает заданного места, может срабатывать датчик бампера уборочного оборудования 153; лазерный датчик оборудования 153 может возвращать состояние рисунка; на уборочном оборудовании 153 может срабатывать концевой выключатель, может сообщаться о состоянии перегрузки по току колеса уборочного оборудования 153, состоянии наклона гироскопа уборочного оборудования 153; определение может выполняться с помощью одного или комбинации нескольких состояний датчиков, в данном варианте реализации это не ограничивается.
[00146] Таким образом, благодаря применению алгоритма регулирования скорости для управления приводным двигателем уборочного оборудования, уборочное оборудование может быстро возвращаться в заданное место без столкновений с зарядной станцией, истирания краев уборочного оборудования и поверхности зарядной станции.
[00147] Согласно варианту реализации, путем приложения установленного меньшего рабочего цикла к приводному двигателю колеса уборочного оборудования, когда оно находится в заданном месте на зарядной станции, как показано на фиг. 15, сила N', создаваемая приводом, может заставить колеса уборочного оборудования вращаться вперед, чтобы использовать это для компенсации возможного движения уборочного оборудования назад, чтобы оно надежно оставалось в заданном положении на зарядной станции и могло обмениваться с ней данными.
[00148] Согласно варианту реализации, приложение движущей силы к ведущему колесу уборочного оборудования в соответствии с относительным положением может также включать в себя следующее: когда расстояние между уборочным оборудованием и заданным местом на зарядной станции меньше или равно заданному предельному значению, уборочное оборудование перемещается по направлению к зарядной станции, пока не достигнет на ней заданного места, после чего движение уборочного оборудования прекращается.
[00149] В других вариантах реализации приложение движущей силы к ведущему колесу уборочного оборудования в соответствии с относительным положением также может включать в себя следующее: когда расстояние между уборочным оборудованием и заданным местом на зарядной станции больше заданного предельного значения, в течение заданного периода времени относительное положение между уборочным оборудованием и зарядной станцией будет сохраняться неизменным; через заданный промежуток времени определяется, изменилось ли состояние устройств, связанных с заданным рабочим состоянием уборочного оборудования, и если оно не изменилось, уборочное оборудование перемещается в направлении зарядной станции, пока не достигнет заданного положения на зарядной станции, после чего останавливается; если же состояние устройств, связанных с заданным положением уборочного оборудования, изменилось, относительное положение между уборочным оборудованием и зарядной станцией сохраняется неизменным.
[00150] На фиг. 16А и 16В показано схематическое изображение управления уборочным оборудованием, когда оно отходит от заданного места на зарядной станции. Последующее описание будет основано на фиг. 16А и фиг. 16 В.
[00151] При обслуживании уборочной системы пользователь может из соображения удобства вручную снять уборочное оборудование с зарядной станции вместо того, чтобы перенести зарядную станцию. Если при этом пользователь не поднимет зарядную станцию с пола, в уборочном оборудовании включится логика выхода со станции и возврата на нее, что повлияет на удобство для пользователя.
[00152] Как показано на фиг. 16А и 16 В, когда уборочное оборудование 163 включено, контроллер уборочного оборудования 163 непрерывно отслеживает движение одометра ведущего колеса уборочного оборудования 163. Одометр ведущего колеса имеет пороговое значение для измерения значения ODO, когда уборочное оборудование 163 естественным образом соскальзывает по наклонной направляющей 162 с зарядной станции 161. Когда контроллер уборочного оборудования 163 обнаруживает изменение значения ODO, управление осуществляется в соответствии с изменением значения ODO. Согласно варианту реализации, когда значение ODO D меньше или равно пороговому значению, на уборочном оборудовании 163 включается первая логика возврата, как показано на фиг. 16А. Когда значение ODO D' больше порогового значения, на уборочном оборудовании 163 включается вторая логика возврата, как показано на фиг. 16 В.
[00153] В первой логике возврата два колеса уборочного оборудования 163 продолжают синхронно вращаться в обратном направлении до тех пор, пока уборочное оборудование 163 не вернется в исходное состояние (например, в состояние зарядки или сбора пыли). Кроме того, в других вариантах реализации, когда срабатывает защита от сверхтока главного колеса уборочного оборудования 163, или при превышении предельного значения тока главного колеса уборочного оборудования 163 колесо прекращает вращение, и включается электромагнитный тормоз.
[00154] Во второй логике возврата уборочное оборудование 163 остается на месте в течение некоторого времени, например, нескольких минут. Если во время остановки не происходит никаких изменений состояния, таких как снятие и возврат пылесборника, срабатывание датчика обрыва, срабатывание датчика падения главного колеса, срабатывание передней балки и т.д., то по достижении заданного времени уборочное оборудование 163 возвращается в исходное состояние (например, состояние зарядки или сбора пыли). Если состояние изменяется, уборочное оборудование 163 остается на месте и не предпринимает никаких действий.
[00155] Согласно варианту реализации, возможно распознавание двух разных состояний: когда пользователь сам убирает уборочное оборудование, и когда уборочное оборудование само отходит от заданного места, и для каждого состояния осуществляется разное управление, что повышает интеллектуальность уборочной системы и улучшает удобство для пользователя.
[00156] Согласно варианту реализации, когда определено, что уборочное оборудование находится в заданном рабочем состоянии, отслеживается местоположение зарядной станции; если местоположение зарядной станции изменилось, уборочное оборудование снова находит ее, и в соответствии с результатами поиска обновляет ранее сохраненное местоположение зарядной станции.
[00157] На фиг. 17 показано схематическое изображение смены позиции зарядной станции в варианте реализации настоящего изобретения. Последующее описание будет основано на фиг. 17.
[00158] Как показано на фиг. 17, уборочная система имеет функцию "сохранения карты", для работы которой имеется предварительное условие, то есть местоположение зарядной станции 171 должно быть неизменным. Если уборочное оборудование 173 заряжается, местоположение зарядной станции 171 сильно меняется. Например, как показано на фиг. 17, зарядная станция перемещается из положения А в положение В, что приведет к тому, что если уборочное оборудование 173 после покидания зарядной станции 171 по наклонной направляющей 172 зарядной станции 171 не сможет в короткое время снова найти ее, появится ошибка поиска SLAM (одновременная локализация и картирование), в результате чего уборочное оборудование 173 не сможет завершить уборку. Однако если каждый раз после выхода со станции на ее повторный поиск требуется много времени, это увеличит время прогрева перед каждой уборкой и серьезно повлияет на удобство работы для пользователя.
[00159] Согласно варианту реализации, когда уборочное оборудование 173, находясь на зарядной станции 171, обнаруживает, что оно сдвинулось (на самом деле, уборочное оборудование 173 сдвинулось вместе с зарядной станцией 171), то начинается повторный поиск зарядной станции.
[00160] В конкретном варианте реализации, после того как уборочное оборудование 173 входит в заданное состояние, для постоянного мониторинга положения уборочного оборудования 173 используются гироскопы, датчики падения, одометры главного колеса и другие датчики. После того как любой из вышеуказанных датчиков обнаружит изменение в положении уборочного оборудования 173, то есть датчик обнаруживает, что положение уборочного оборудования 173 изменилось, и после того, как датчик обнаружит, что уборочное оборудование 173 прекратило движение, уборочное оборудование 173 начинает снова выполнять поиск зарядной станции.
[00161] Если уборочное оборудование 173 и зарядная станция 171 остаются неподвижными относительно друг друга, уборочное оборудование 173 снова определяет свое местоположение и подтверждает, что зарядная станция 171 находится в предварительно заданном на карте месте.
[00162] В конкретном варианте реализации уборочное оборудование 173 может выполнять повторный поиск зарядной станции с помощью LDS и/или камер, процесс повторного поиска выглядит примерно так: уборочное оборудование 173 поворачивается на месте и повторно находит станцию с помощью LDS и/или камер; в случае неудачи уборочное оборудование 173 перемещается на определенное расстояние и снова выполняет поиск. Повторный поиск выполняется только по положению уборочного оборудования 173 относительно препятствий/отметок, сохраненных на карте. Когда уборочное оборудование 173 снова определяет свое положение на зарядной станции 171, если в этом случае нет камеры и/или камера не обращена наружу зарядной станции 171, определение местоположения возможно только с помощью LDS.
[00163] В конкретном варианте реализации после включения логики "повторного поиска после перемещения вместе со станцией" уборочное оборудование 173 активирует лазерный датчик LDS на зарядной станции 171 для повторного определения своего местоположения на станции. При повторном определении местоположения на зарядной станции датчик LDS уборочного оборудования 173 сопоставляет текущую лазерную карту и карту до перемещения уборочного оборудования 173 (зарядной станции 171); если сходство карт ниже определенного порогового значения, считается, что уборочное оборудование 173 "переместилось вместе с зарядной станцией". При этом после успешного определения положения на станции уборочное оборудование 53 удаляет последнее сохраненное местоположение зарядной станции 171 и повторно отмечает текущее положение как новое положение зарядной станции 171. Если уборочному оборудованию 173 не удалось снова определить свое положение на станции, покинув зарядную станцию 171, на нем включается обычная логика локального определения местоположения; после успешного определения нового местоположения последнее сохраненное зарядной станцией 171 местоположение удаляется, и текущее местоположение помечается как новое положение зарядной станции 171. Уборочное оборудование распознает, что оно делает на зарядной станции - заряжается или выполняет другие задачи; в общем, это можно определить по тому, контактируют ли зарядный электрод уборочного оборудования и зарядный электрод зарядной станции. Конечно, также могут использоваться и другие способы, в данном варианте реализации настоящего изобретения это не ограничивается.
[00164] В данном варианте реализации оптимизирован процесс запуска уборки уборочным оборудованием после выхода со станции, если используется крупная зарядная станция.
[00165] В данном варианте реализации после того, как определено, что уборочное оборудование завершило заданное рабочее состояние и должно покинуть зарядную станцию, определяется относительное положение между уборочным оборудованием и зарядной станцией; если относительное положение между ними не изменилось, к ведущему колесу уборочного оборудования прикладывается движущая сила с третьей скоростью в направлении от зарядной станции. Эта третья скорость больше, чем обычная рабочая скорость уборочного оборудования.
[00166] На фиг. 18 показано схематическое изображение управления уборочным оборудованием, покидающим зарядную станцию в варианте реализации настоящего изобретения. Последующее описание будет основано на фиг. 18.
[00167] Как показано на фиг. 18, зарядная станция 181 имеет наклонную направляющую 182, после того как уборочное оборудование 183 возвращается на зарядную станцию 181 по направляющей 182, из-за необходимости удерживать уборочное оборудование 183, на зарядной станции 181 обычно предусмотрены прорези или ограничители для колес уборочного оборудования 183, которые предотвращают соскальзывание уборочного оборудования 183 вниз по направляющей 182 с зарядной станции 181.
[00168] Если уборочное оборудование 183 находится в заданном рабочем состоянии и после завершения заданной задачи, например, зарядки, собирается покинуть зарядную станцию 181 для выполнения других задач, оно сначала отъезжает назад или вперед, чтобы покинуть зону зарядки, в зависимости от того, в какую сторону оно было направлено в момент зарядки. Из-за характера напольного покрытия, помех между конструкцией зарядной станцией и конструкцией уборочного оборудования, скольжения колес или сопротивления других компонентов на уборочном оборудовании, контактирующих с полом, может возникнуть ситуация, когда колеса крутятся, но по факту движения нет.
[00169] В варианте реализации настоящего изобретения при таком явлении сначала необходимо определить, не покинуло ли уборочное оборудование 183 зарядную станцию 181. В частности, сначала рассматривалась возможность подсчета оборотов колес, но из-за возможности проскальзывания нет никакой гарантии, что это будет возможным. Здесь путем сравнения данных LDS до начала управления и данных через какое-то время можно определить, не покидало ли уборочное оборудование 183 зарядную станцию 181. Если определено, что уборочное оборудование 183 не покидало зарядную станцию 181, небольшое расстояние оно проезжает на более высокой скорости V, чтобы уменьшить вероятность застревания на зарядной станции 181.
[00170] В данном варианте реализации можно реализовать быстрый выход уборочного оборудования с зарядной станции, чтобы улучшить опыт использования уборочной системы.
[00171] Данный вариант реализации также предусматривает устройство управления уборочной системой. На фиг. 19 показана блок-схема устройства управления 190 уборочной системой в варианте реализации настоящего изобретения. Устройство управления 190 уборочной системой включает в себя модуль сбора данных 191, модуль определения 192 и приводной модуль 193.
[00172] В данном варианте реализации модуль сбора данных 191 предназначен для получения текущего рабочего состояния уборочного оборудования. Модуль определения 192, определив, что уборочное оборудование находится в предварительно заданном рабочем состоянии, определяет относительное положение между уборочным оборудованием и зарядной станцией. Приводной модуль 193 в соответствии с определенным ранее относительным положением приводит в движение ведущее колесо уборочного оборудования, и уборочное оборудование начинает двигаться относительно зарядной станции или остается на зарядной станции.
[00173] Конкретное описание работы вышеуказанных функциональных модулей можно посмотреть в разделе этапов управления уборочной системой 200 в вышеупомянутом варианте реализации, здесь это повторяться не будет.
[00174] Конкретное описание работы вышеуказанных функциональных модулей можно посмотреть в разделе этапов управления уборочной системой 200 в вышеупомянутом варианте реализации, здесь это повторяться не будет.
[00175] Данный вариант реализации также предусматривает электронное оборудование для выполнения описанных выше различных задач. На фиг. 20 показана блок-схема электронного оборудования 20, используемого в варианте реализации настоящего изобретения. Электронное оборудование означает цифровые вычислительные машины, мобильные устройства различных форм или другие подобные вычислительные устройства. Компоненты, указанные в данном описании, их соединения и взаимосвязи, а также их функции приводятся лишь в качестве примеров и не ограничивают реализацию настоящего изобретения в этой заявке.
[00176] Как показано на фиг. 20, оборудование 2 включает в себя вычислительный блок 201, который может выполнять различные операции и процессы на основе компьютерной программы, хранящейся в ПЗУ (ROM) 202, или компьютерной программы, загруженной из запоминающего устройства 208 в оперативную память (RAM) 203. В оперативной памяти 203 также могут храниться различные программы и данные, необходимые для работы оборудования 2. Вычислительный блок 201, ПЗУ 202 и оперативная память 203 соединяются друг с другом через шину 204. Интерфейс 205 ввода-вывода (I/O) также подключен к шине 204.
[00177] К интерфейсу 205 ввода-вывода подключено множество компонентов оборудования 2, включая блок ввода 206, такой как клавиатура, мышь и т.д., блок вывода 207, такой как различные типы дисплеев, динамиков и т.д., блок хранения 208, такой как магнитные диски, оптические диски, и т.д., и блок связи 209, такой как сетевые карты, модемы, беспроводные приемопередатчики и т.д. Блок связи 209 позволяет оборудованию 2 обмениваться информацией/данными с другими устройствами через компьютерную сеть, такую как Интернет и/или различные телекоммуникационные сети.
[00178] Вычислительный блок 201 может представлять собой универсальный и/или специализированный процессор с возможностями обработки и вычислений. Некоторые примеры вычислительного блока 201 включают, без ограничений, центральный процессор (CPU), графический процессор (GPU), различные специализированные микросхемы искусственного интеллекта (AI), различные вычислительные блоки, выполняющие алгоритмы модели машинного обучения, цифровые сигнальные процессоры (DSP) и любые соответствующие процессоры, контроллеры, микроконтроллеры и т.д. Вычислительный блок 201 выполняет различные задачи и процессы, описанные выше.
[00179] Различные варианты реализации систем и технологий, описанные выше в этом документе, могут быть реализованы в системах цифровых электронных схем, системах интегральных схем, программируемых логических интегральных схем (FPGA), специализированных интегральных схемах (ASIC), специализированных стандартных продуктах (ASSP), системах на микросхеме (SOC), сложных устройствах с программируемой логикой (CPLD), на компьютерном оборудовании, в микропрограммном обеспечении, программном обеспечении и/или на их комбинации. Эти различные варианты реализации могут включать в себя реализацию в одной или более компьютерных программах, которые могут выполняться и/или интерпретироваться в программируемой системе, включающей, по меньшей мере, один программируемый процессор, программируемый процессор может быть специализированным или универсальным программируемым процессором, может принимать данные и команды из системы хранения данных, по меньшей мере, одного устройства ввода и по меньшей мере одного устройства вывода, и передавать данные и команды в систему хранения, по меньшей мере, на одно устройство ввода и по меньшей мере одно устройство вывода.
[00180] Программный код, используемый для реализации описанного здесь варианта, может быть написан на любой комбинации одного или нескольких языков программирования. Эти программные коды могут быть предоставлены процессору или контроллеру универсального или специализированного компьютера или другого программируемого устройства обработки данных, чтобы программный код при выполнении процессором или контроллером позволял реализовать функции/операции, указанные в технологической схеме и/или блок-схеме. Программный код может быть выполнен полностью на компьютере, частично на компьютере, как автономный программный пакет частично на компьютере и частично на удаленной машине, или полностью на удаленной машине или сервере.
[00181] В контексте данного изобретения машиночитаемый носитель может быть материальным носителем, который может содержать или сохранять программы для использования системой, устройством или компонентом для выполнения команд или их комбинацией. Машиночитаемый носитель может быть машиночитаемым носителем сигнала или машиночитаемым носителем информации. Машиночитаемые носители могут включать, без ограничений, электронные, магнитные, оптические, электромагнитные, инфракрасные или полупроводниковые системы, устройства или оборудование, или любую подходящую их комбинацию. Более конкретные примеры машиночитаемых носителей информации включают электрические соединения на основе одного или нескольких проводов, портативные компьютерные диски, жесткие диски, оперативную память (RAM), постоянное запоминающее устройство (ПЗУ), стираемое программируемое постоянное запоминающее устройство (EPROM или флэш-память), оптоволокно, ПЗУ на компакт-диске (CD-ROM), оптические запоминающие устройства, магнитные запоминающие устройства или любую подходящую их комбинацию.
[00182] Компьютерная система может включать в себя клиент и сервер. Клиент и сервер, как правило, находятся далеко друг от друга и обычно взаимодействуют через телекоммуникационную сеть. Связь между клиентом и сервером обеспечивается компьютерными программами, которые выполняются на соответствующих компьютерах и сами имеют отношения клиент-сервер друг с другом.
[00183] На основе описания приведенного выше варианта реализации техническим специалистам в данной области техники легко понять, что описанный здесь вариант может быть реализован с помощью программного обеспечения или комбинации программного обеспечения и необходимого аппаратного обеспечения. Таким образом, техническое решение согласно вариантам реализации настоящего изобретения может быть воплощено в виде программного обеспечения, которое может храниться на энергонезависимом носителе информации (которым может быть CD-ROM, диск USB, мобильный жесткий диск и т.д.) или в сети, включая набор команд, позволяющих вычислительному устройству (которое может быть персональным компьютером, сервером, оконечным устройством, сетевым устройством и т.д.) выполнять задачи, описанные в варианте реализации данного изобретения.
[00184] Кроме того, приведенные выше чертежи предназначены лишь для схематического описания процессов, включенных в задачи, предусмотренные вариантом реализации настоящего изобретения, а не для ограничения изобретения. Легко понять, что процессы, показанные на приведенных выше чертежах, не выражают и не ограничивают хронологический порядок этих операций. Кроме того, легко понять, что эти процессы могут выполняться синхронно или асинхронно, например, в нескольких модулях.
[00185] Следует отметить, что, хотя в приведенном выше подробном описании упоминаются несколько модулей или блоков оборудования, используемого для выполнения разных операций, это разделение не является обязательным. Фактически, согласно варианту реализации настоящего изобретения, характеристики и функции двух или более модулей или блоков, описанных выше, могут быть воплощены в одном модуле или блоке. И наоборот, характеристики и функции одного модуля или блока, описанные выше, могут быть дальше при воплощении поделены между множеством модулей или блоков.
[00186] Данная заявка охватывает любые вариации, виды использования или адаптации настоящего изобретения; эти вариации, виды использования или адаптации соответствуют общим принципам действия настоящего изобретения и включают хорошо известные в данной области техники или привычные технические средства. Описание и варианты реализации считаются лишь иллюстративными, а подлинная область применения и сущность этого изобретения указаны в формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическое уборочное оборудование | 2021 |
|
RU2820188C1 |
| Автоматическое уборочное оборудование | 2024 |
|
RU2841299C2 |
| БАЗОВАЯ СТАНЦИЯ И СИСТЕМА РОБОТА-УБОРЩИКА | 2021 |
|
RU2833538C2 |
| БАЗОВАЯ СТАНЦИЯ И СИСТЕМА РОБОТА-УБОРЩИКА | 2021 |
|
RU2833996C2 |
| Способ и устройство для обхода препятствий роботом-уборщиком, носитель информации и электронное оборудование | 2021 |
|
RU2826126C1 |
| Уборочное оборудование и способы обнаружения загрязнений | 2021 |
|
RU2831217C2 |
| РОБОТ-ПЫЛЕСОС С ФУНКЦИЕЙ WI-FI | 2023 |
|
RU2831101C1 |
| РОБОТИЗИРОВАННАЯ СИСТЕМА ЧИСТКИ, БАЗОВАЯ СТАНЦИЯ И СПОСОБ ЕЕ УПРАВЛЕНИЯ | 2019 |
|
RU2777408C1 |
| Робот-уборщик и способ очистки | 2019 |
|
RU2775535C1 |
| МОБИЛЬНЫЙ УБОРОЧНЫЙ КОМПЛЕКС | 2014 |
|
RU2579137C1 |
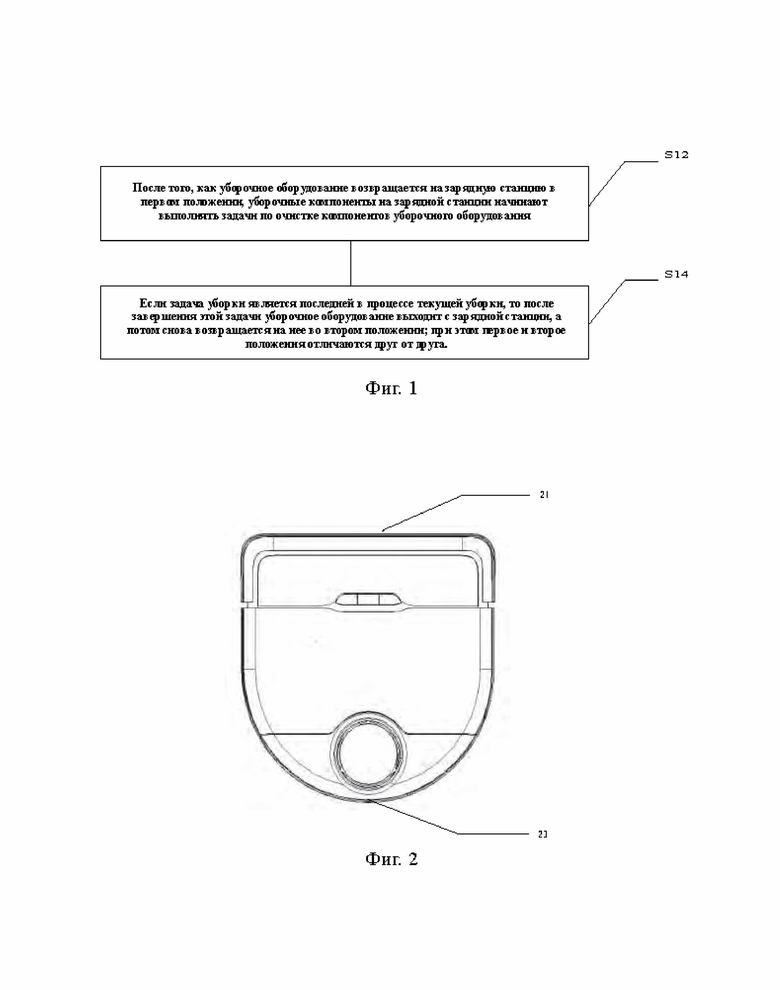
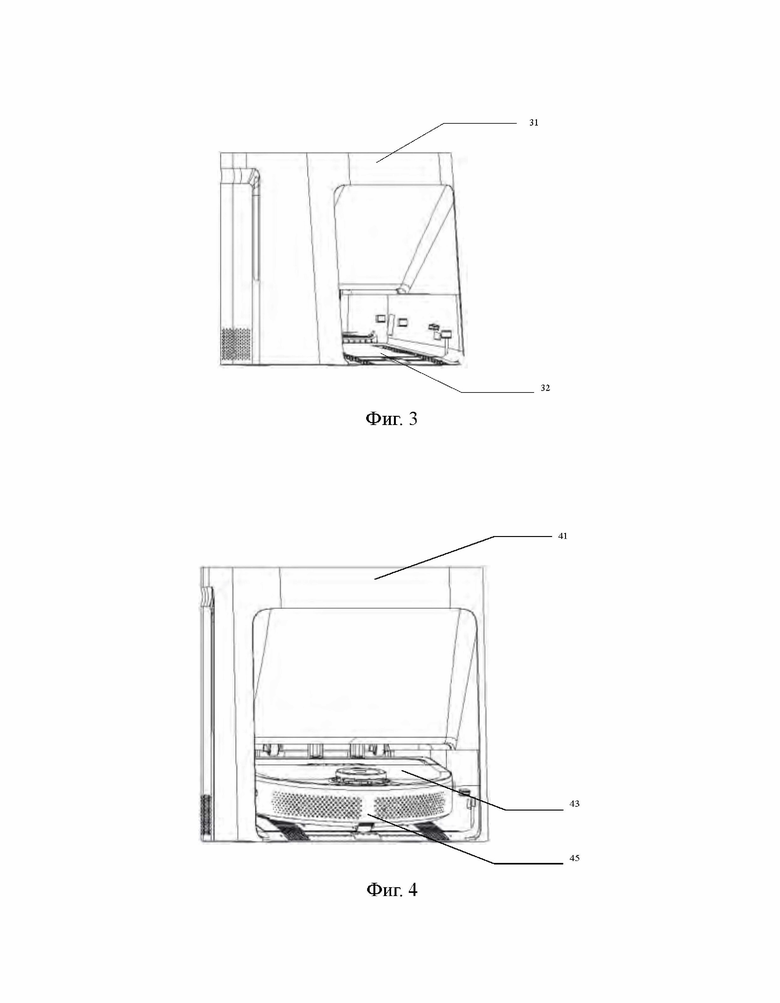
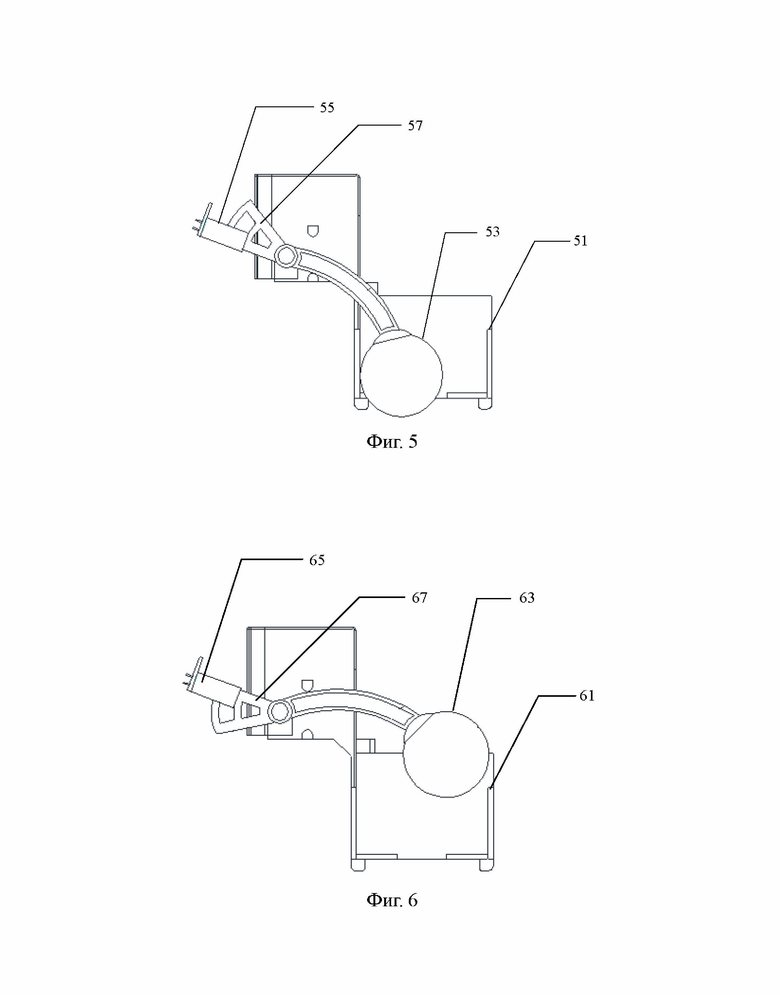
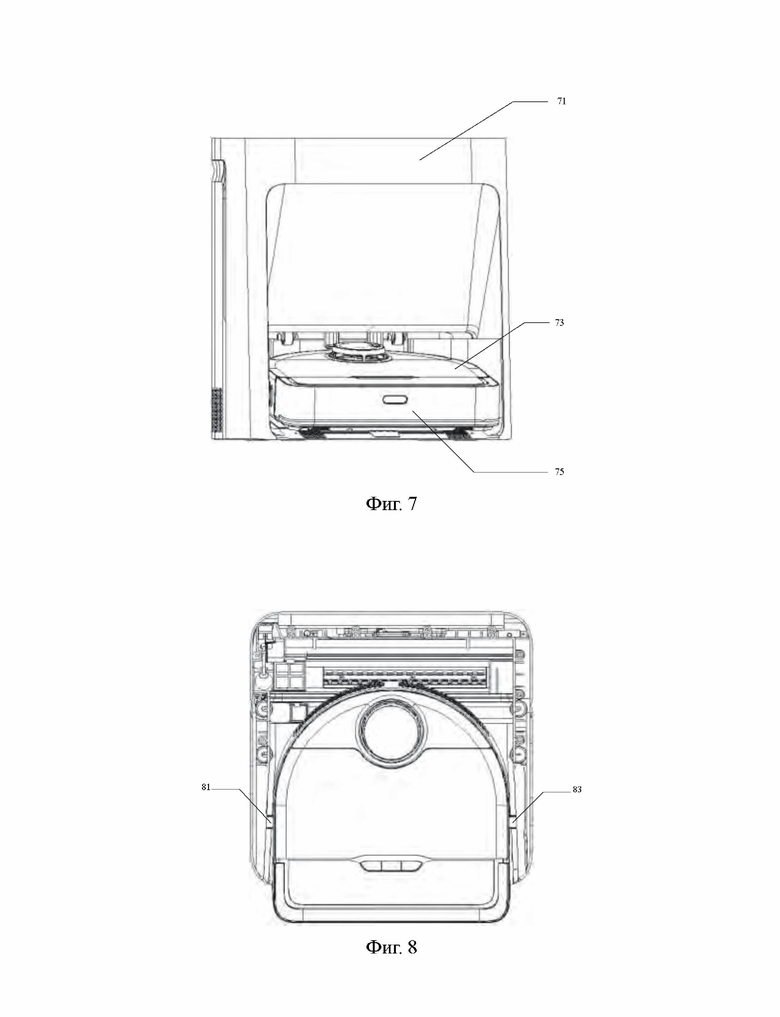
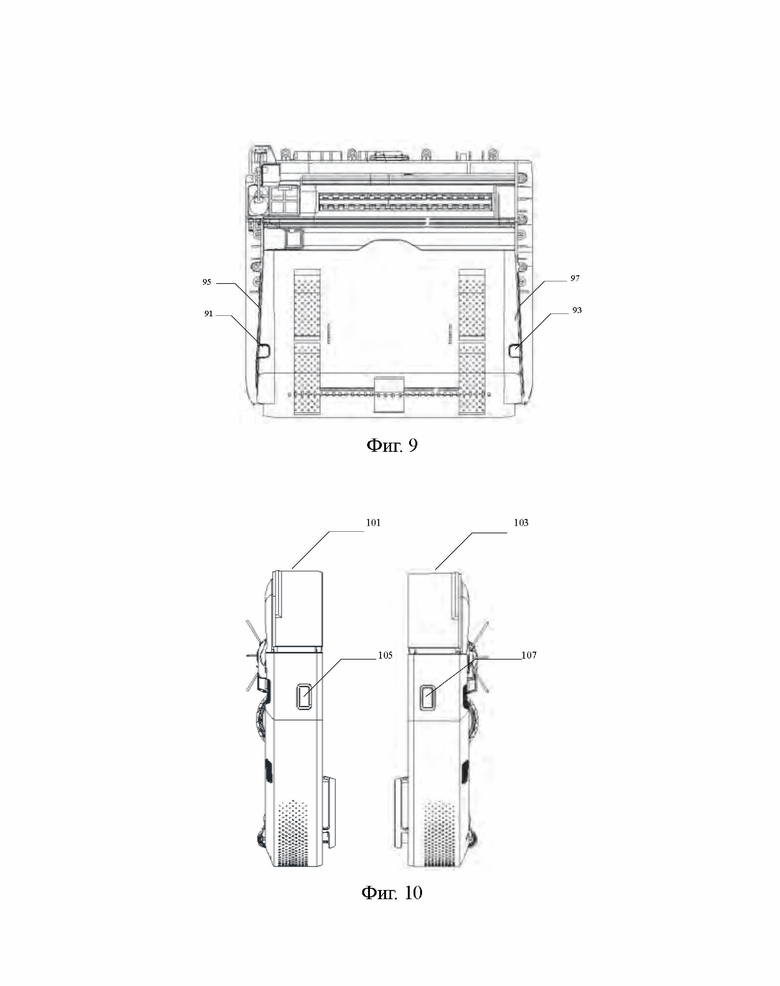
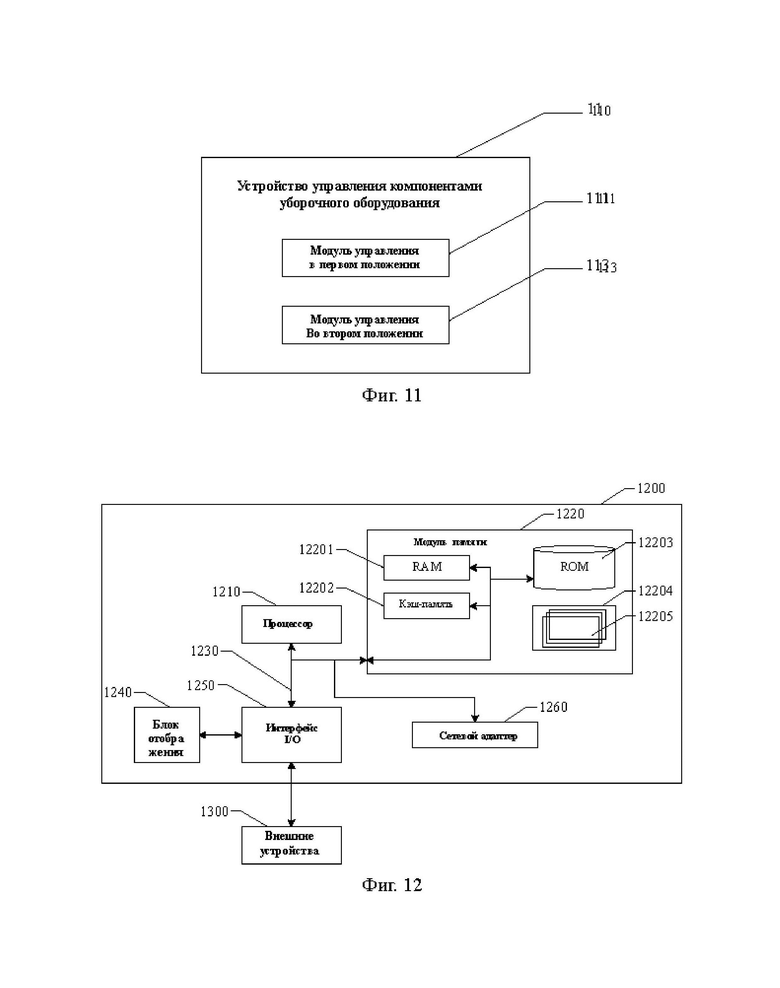
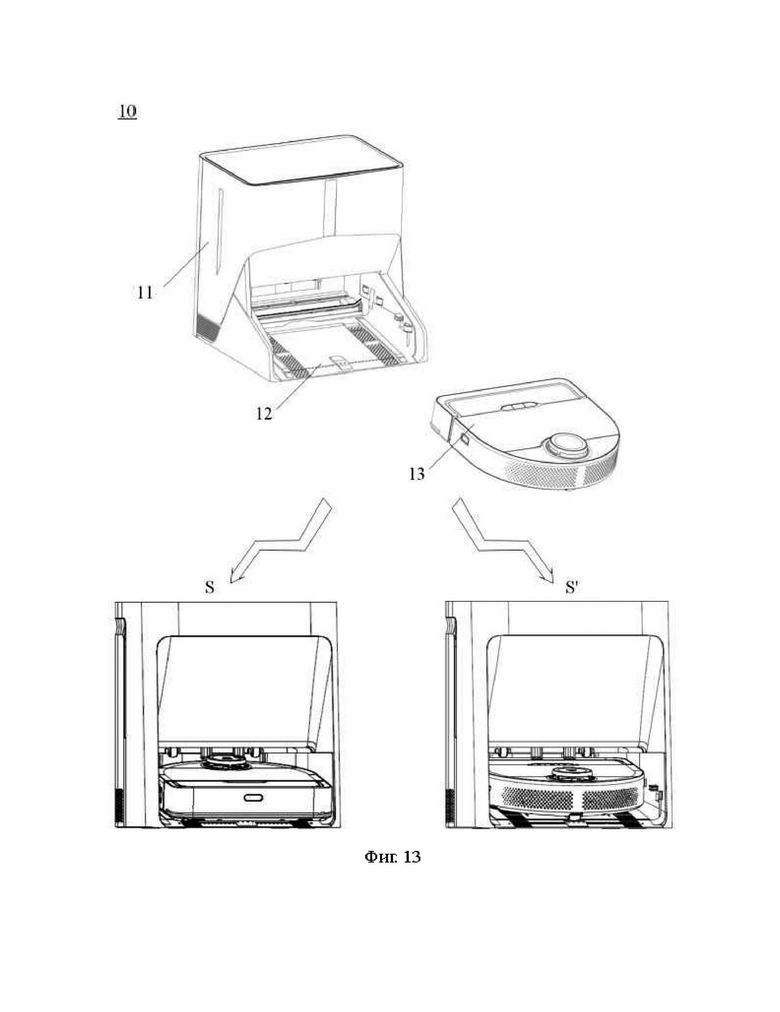
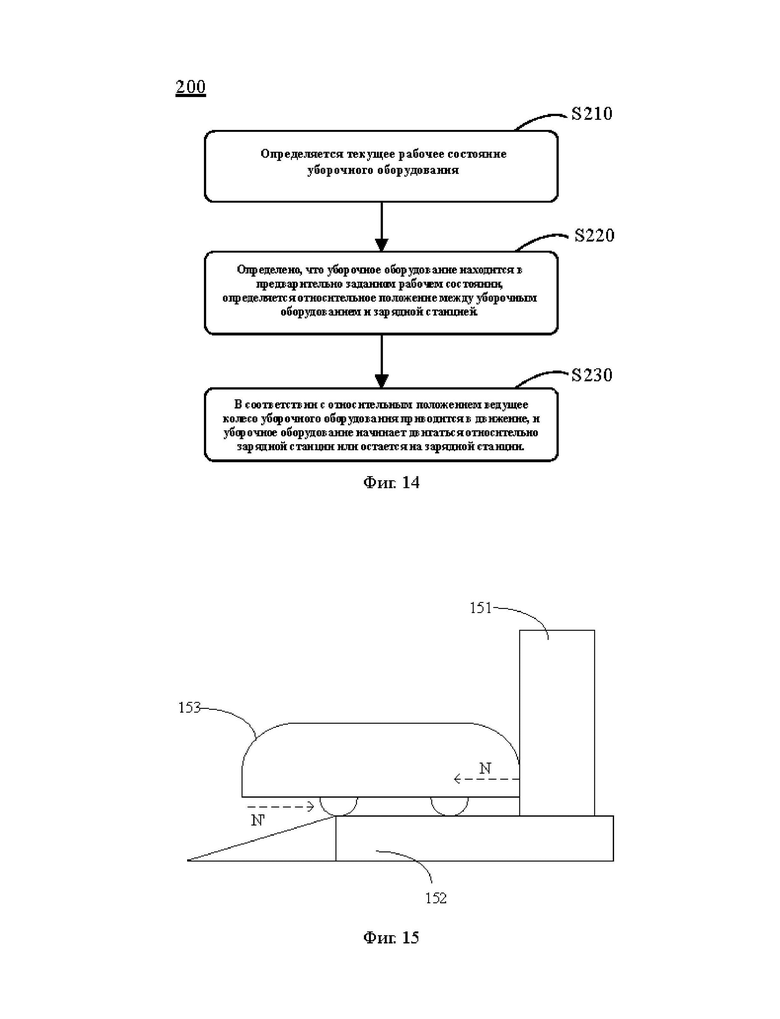
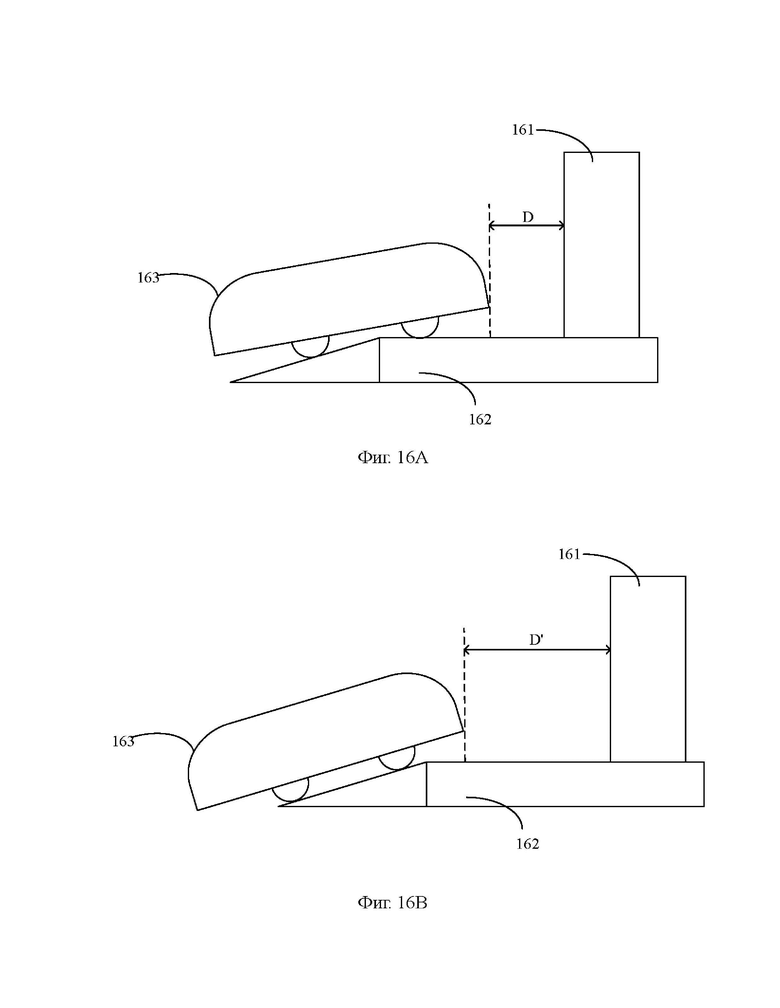
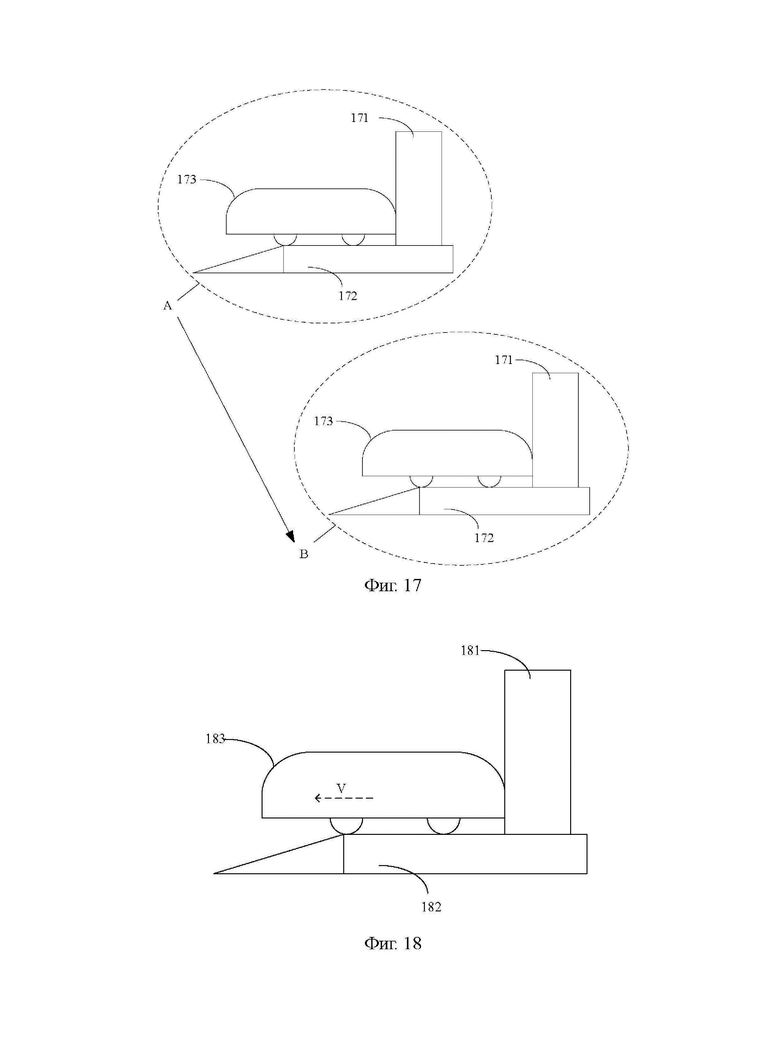
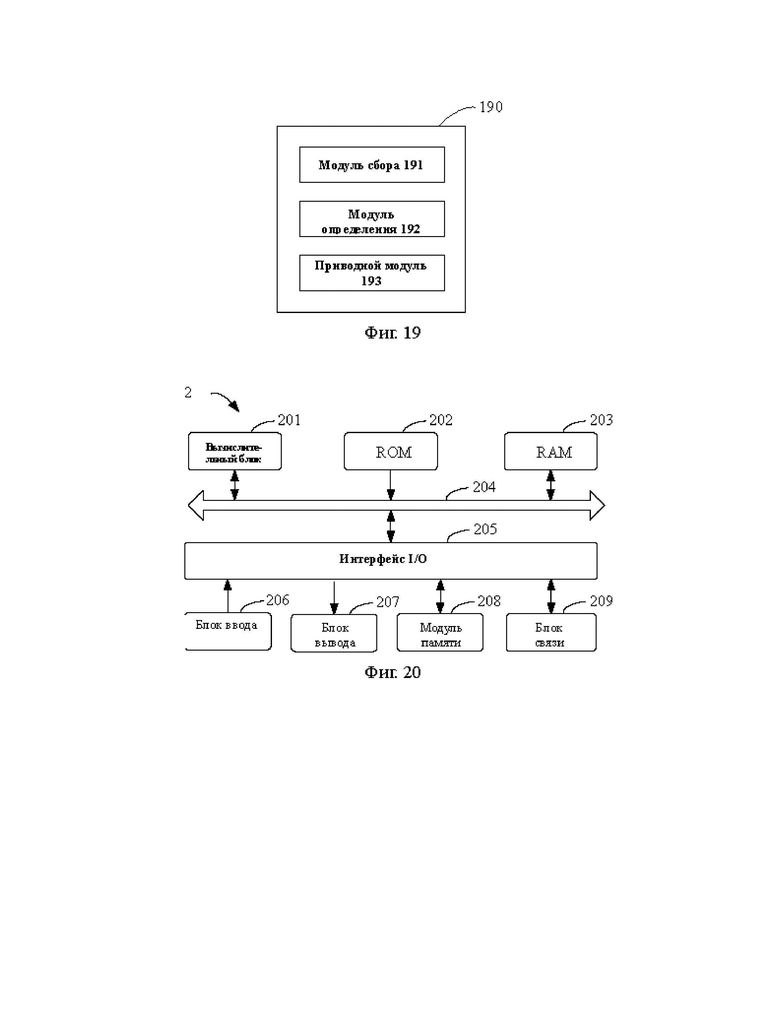
Группа изобретений относится к технике для уборки помещений. При осуществлении способа после того как уборочное оборудование в первом положении возвращается на зарядную станцию, управляют уборочными компонентами на зарядной станции для выполнения задачи по очистке уборочных компонентов уборочного оборудования. Если задача по очистке является последней в процессе уборки, и эта задача по очистке завершена, осуществляют управление уборочным оборудованием для выхода с зарядной станции и возврата на зарядную станцию во втором положении. Второе положение отличается от первого, при этом процесс уборки представляет собой процесс уборки заданной области. Обеспечивается автоматическая очистка уборочных компонентов, повышается удобство эксплуатации и обслуживания. 3 н. и 12 з.п. ф-лы, 21 ил.
1. Способ управления очисткой уборочных компонентов уборочного оборудования, который включает следующее:
после того как уборочное оборудование в первом положении возвращается на зарядную станцию, управление уборочными компонентами на зарядной станции для выполнения задачи по очистке уборочных компонентов уборочного оборудования; и
если задача по очистке является последней в процессе уборки, и эта задача по очистке завершена, управление уборочным оборудованием для выхода с зарядной станции и возврата на зарядную станцию во втором положении, при этом второе положение отличается от первого, при этом процесс уборки представляет собой процесс уборки заданной области.
2. Способ по п. 1, в котором, после того как уборочное оборудование возвращается на зарядную станцию в первом положении, оно не находится в состоянии зарядки.
3. Способ по п. 1, в котором возврат уборочного оборудования на зарядную станцию в первом положении включает следующее:
обнаружение, датчиком на уборочном оборудовании, индикатора на зарядной станции, который используется для указания места уборочного оборудования на зарядной станции; и
управление уборочным оборудованием, в соответствии с этим индикатором, для перемещения в заданное место на зарядной станции в первом положении.
4. Способ по п. 1, в котором управление уборочными компонентами на зарядной станции для выполнения задачи по очистке уборочных компонентов уборочного оборудования включает следующее:
управление уборочными компонентами на зарядной станции для выполнения подачи воды для очистки уборочных компонентов уборочного оборудования;
управление уборочным оборудованием для удаления излишков воды с уборочных компонентов уборочного оборудования; и
управление уборочными компонентами на зарядной станции для выполнения слива грязной воды, образованной после очистки уборочных компонентов уборочного оборудования.
5. Способ по п. 4, в котором уборочные компоненты на зарядной станции включают в себя резервуар для чистой воды, промывочную емкость и модуль контроля уровня воды, при этом управление уборочными компонентами на зарядной станции для выполнения подачи воды для очистки уборочных компонентов уборочного оборудования включает следующее:
из резервуара для чистой воды подают чистую воду, которая попадает в промывочную емкость;
уровень воды в промывочной емкости контролируют с помощью модуля контроля уровня воды; и
когда уровень воды в промывочной емкости достигает заданного значения, подачу воды прекращают.
6. Способ по п. 4, в котором управление уборочным оборудованием для удаления излишков воды с уборочных компонентов уборочного оборудования включает следующее:
уборочные компоненты уборочного оборудования поднимают на заданную высоту так, чтобы уборочные компоненты уборочного оборудования были изолированы от уборочных компонентов зарядной станции; и
уборочные компоненты уборочного оборудования приводят во вращение с заданной скоростью для освобождения от излишков воды.
7. Способ по п. 4, в котором уборочные компоненты на зарядной станции включают резервуар для грязной воды, и управление уборочными компонентами на зарядной станции для выполнения слива грязной воды включает:
слив грязной воды в резервуар для грязной воды.
8. Способ по п. 5, в котором, после завершения задачи по очистке,
управляют резервуаром для чистой воды в уборочных компонентах на зарядной станции для подачи чистой воды для промывки промывочной емкости.
9. Способ по п. 1, в котором:
если задача по очистке не является последней в процессе уборки, после завершения этой задачи управляют уборочным оборудованием для выполнения следующей задачи по очистке.
10. Способ по п. 1, в котором управление уборочным оборудованием для возврата на зарядную станцию во втором положении включает следующее:
управление уборочным оборудованием для перемещения к передней стороне зарядной станции в первом положении, при этом передняя сторона зарядной станции является стороной, где находится входное отверстие, через которое уборочное оборудование попадает на зарядную станцию; и,
когда расстояние между уборочным оборудованием и зарядной станцией меньше заранее заданного, управление уборочным оборудованием для перемещения к передней стороне зарядной станции во втором положении для возврата на зарядную станцию.
11. Способ по п. 10, в котором, когда расстояние между уборочным оборудованием и зарядной станцией меньше заранее заданного, управление уборочным оборудованием для перемещения к передней стороне зарядной станции во втором положении для возврата на зарядную станцию включает:
если уборочное оборудование не возвращается на зарядную станцию в течение заданного периода времени, управление уборочным оборудованием для выполнения голосового сообщения об ошибке.
12. Способ по п. 10, в котором зарядная станция содержит модуль зарядки и, после того как уборочное оборудование во втором положении перемещается к передней стороне зарядной станции и входит на зарядную станцию, способ включает следующее:
получение информации о заряде уборочного оборудования и,
если уровень заряда ниже заранее заданного порогового значения, управление модулем зарядки для зарядки уборочного оборудования.
13. Способ по п. 10, в котором уборочные компоненты на зарядной станции содержат вытяжной модуль для вытяжки воздуха, и, после того как уборочное оборудование во втором положении перемещается к передней стороне зарядной станции и входит на зарядную станцию, также выполняют следующее:
управляют вытяжным модулем для просушки уборочных компонентов уборочного оборудования.
14. Устройство для управления очисткой уборочных компонентов уборочного оборудования, содержащее:
модуль управления в первом положении, предназначенный для того, чтобы, после возврата уборочного оборудования в первом положении на зарядную станцию, управлять уборочными компонентами на зарядной станции для выполнения задачи по очистке уборочных компонентов уборочного оборудования; и
модуль управления во втором положении, предназначенный для того, чтобы, если задача по очистке является последней в процессе уборки, и эта задача по очистке завершена, управлять уборочным оборудованием для выхода с зарядной станции и возврата на зарядную станцию во втором положении, при этом второе положение отличается от первого, при этом процесс уборки представляет собой процесс уборки заданной области.
15. Машиночитаемый носитель информации, на котором хранится компьютерная программа, при выполнении которой процессором осуществляется способ управления очисткой уборочных компонентов уборочного оборудования по любому из пп. 1-13.
| WO 2018107465 A1, 21.06.2018 | |||
| УСТРОЙСТВО ДЛЯ ХРАНЕНИЯ И ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ МОБИЛЬНОЙ ОЧИСТИТЕЛЬНО-УБОРОЧНОЙ ИЛИ ЕЙ ПОДОБНОЙ МАШИНЫ | 1995 |
|
RU2106268C1 |
| Способ отыскания мест утечки в заполненных маслом кабелях с полым проводом | 1929 |
|
SU36313A1 |
| CN 110916569 A, 27.03.2020 | |||
| WO 2018107465 A1, 21.06.2018 | |||
| CN 111820824 A, 27.10.2020. | |||

