Перекрестные ссылки на родственные заявки
[0001] Настоящая патентная заявка притязает на приоритет на основе китайской заявки с номером 202110805968.1, поданной 16 июля 2021 года, все ее содержание включено в данный документ путем ссылки.
Область техники
[0002] Настоящее изобретение относится к области техники "умного дома", в частности к базовой станции и системе робота-уборщика.
Уровень техники
[0003] В смежных технологиях после того, как робот-уборщик выполнит задачу по уборке, обычно ему требуется очистка уборочного блока, и на текущем этапе эта очистка в основном выполняется вручную или непосредственно заменой на новый уборочный блок, что крайне неудобно в процессе использования.
Раскрытие сущности изобретения
[0004] Изобретение представляет базовую станцию и систему робота-уборщика, которые используются для автоматической очистки уборочного механизма.
[0005] В одном из аспектов настоящего изобретения представлена базовая станция для очистки уборочной системы робота-уборщика, которая включает в себя:
[0006] Корпус базовой станции;
[0007] Узел очистки, который может подвижно размещаться на корпусе базовой станции и включает в себя первый чистящий элемент и второй чистящий элемент, отличающийся от первого чистящего элемента;
[0008] При этом первый чистящий элемент и второй чистящий элемент очищают уборочную систему от мусора, контактируя с уборочной системой.
[0009] В одном из вариантов реализации настоящего изобретения узел очистки также включает в себя:
[0010] Держатель узла очистки, на котором параллельно расположены первый чистящий элемент и второй чистящий элемент.
[0011] В одном из вариантов реализации настоящего изобретения первый чистящий элемент включает в себя чистящий ролик, который установлен с возможностью вращения относительно держателя узла очистки.
[0012] В одном из вариантов реализации настоящего изобретения на внешней поверхности чистящего ролика находится щетка и/или лопатка.
[0013] В одном из вариантов реализации настоящего изобретения второй чистящий элемент включает в себя чистящий скребок.
[0014] В одном из вариантов реализации настоящего изобретения, когда робот-уборщик перемещается к корпусу базовой станции, узел очистки перемещается относительно корпуса базовой станции; при этом
[0015] чистящий ролик выполнен таким образом, чтобы во время вращения его щетка и/или лопатка, расположенные на внешней поверхности, взаимодействовали с уборочной системой робота-уборщика;
[0016] Чистящий скребок выполнен так, чтобы во время перемещения относительно корпуса базовой станции взаимодействовать с уборочной системой робота-уборщика;
[0017] В одном из вариантов реализации узел очистки также содержит приводную часть, которая соединяется с корпусом базовой станции и держателем узла очистки и приводит в движение держатель узла очистки относительно корпуса базовой станции.
[0018] В одном варианте реализации настоящего изобретения приводная часть соединяется с приводом первого чистящего элемента и предназначается для вращения первого чистящего элемента относительно держателя узла очистки;
[0019] При этом когда держатель узла очистки перемещается относительно корпуса базовой станции, первый чистящий элемент поворачивается относительно держателя узла очистки.
[0020] В одном из вариантов реализации настоящего изобретения узел очистки также включает в себя:
[0021] Устройство для выпуска жидкости, чистящая жидкость, выпускаемая из этого устройства, используется для очистки уборочной системы робота-уборщика.
[0022] В одном варианте реализации настоящего изобретения корпус базовой станции включает в себя очистной бак, над которым находится узел очистки;
[0023] При этом чистящая жидкость, выпускаемая из устройства для выпуска жидкости, поступает в очистной бак.
[0024] В одном варианте реализации настоящего изобретения на очистном баке предусмотрено сливное отверстие, через которое чистящая жидкость сливается из очистного бака.
[0025] В одном варианте реализации настоящего изобретения корпус базовой станции также включает в себя нижнюю направляющую поверхность, на которой имеется противоскользящий выступ, по которому робот-уборщик перемещается вдоль нижней направляющей поверхности;
[0026] При этом между узлом очистки и противоскользящим выступом имеется промежуток.
[0027] В одном варианте реализации настоящего изобретения корпус базовой станции также включает в себя верхнюю направляющую поверхность, на которой имеется направляющая часть, контактирующая с роботом-уборщиком;
[0028] При этом направляющая часть расположена над узлом очистки.
[0029] В одном варианте реализации настоящего изобретения базовая станция также включает в себя:
[0030] кран для долива воды, который расположен на корпусе базовой станции и подсоединяется к резервуару для жидкости в роботе-уборщике, чтобы базовая станция могла доливать жидкость в резервуар для жидкости через этот кран.
[0031] В одном аспекте настоящего изобретения представлена система робота-уборщика, включающая вышеупомянутую базовую станцию и робота-уборщика.
[0032] В этом варианте реализации базовой станции узел очистки располагается напротив уборочного механизма, чтобы они перемещались относительно друг друга, и первый чистящий элемент и второй чистящий элемент контактировали с уборочным механизмом робота-уборщика, очищая уборочный механизм от мусора и тем самым реализуя функцию самоочистки робота-уборщика на узле очистки.
Описание схем
[0033] Чертежи, прилагаемые к подробному описанию предпочтительных вариантов реализации данного изобретения ниже, помогут легче понять различные цели, особенности и преимущества этого изобретения. Чертежи являются лишь схематическими иллюстрациями настоящего изобретения и не обязательно выполнены в масштабе. Одни и те же обозначения на чертежах всегда обозначают одни и те же или похожие детали. В том числе:
[0034] На фиг. 1 показана конструктивная схема робота-уборщика в первом положении системы робота-уборщика в одном из примерных вариантов реализации;
[0035] На фиг. 2 показана конструктивная схема робота-уборщика во втором положении системы робота-уборщика в одном из примерных вариантов реализации;
[0036] На фиг. 3 показана конструктивная схема робота-уборщика под первым углом обзора в одном из примерных вариантов реализации;
[0037] На фиг. 4 показана конструктивная схема робота-уборщика под вторым углом обзора в одном из примерных вариантов реализации;
[0038] На фиг. 5 показана конструктивная схема части робота-уборщика в разобранном виде в одном из примерных вариантов реализации;
[0039] На фиг. 6 показана конструктивная схема робота-уборщика под третьим углом обзора в одном из примерных вариантов реализации;
[0040] На фиг. 7 показана конструктивная схема резервуара для жидкости в роботе-уборщике в одном из примерных вариантов реализации;
[0041] На фиг. 8 показана конструктивная схема резервуара для жидкости в роботе-уборщике в разрезе в одном из примерных вариантов реализации;
[0042] На фиг. 9 показана конструктивная схема робота-уборщика под четвертым углом обзора в одном из примерных вариантов реализации;
[0043] На фиг. 10 показана конструктивная схема опорной платформы робота-уборщика в одном из примерных вариантов реализации;
[0044] На фиг. 11 показана конструктивная схема части базовой станции в одном из примерных вариантов реализации;
[0045] На фиг. 12 показана конструктивная схема части базовой станции робота-уборщика в одном из примерных вариантов реализации;
[0046] На фиг. 13 показана конструктивная схема внутренней части базовой станции под первым углом обзора в одном из примерных вариантов реализации;
[0047] На фиг. 14 показана конструктивная схема базовой части под вторым углом обзора в одном из примерных вариантов реализации;
[0048] На фиг. 15А показана конструктивная схема части узла очистки на базовой станции в одном из примерных вариантов реализации;
[0049] На фиг. 15В показана конструктивная схема части узла очистки на базовой станции в одном из примерных вариантов реализации;
[0050] На фиг. 15С показана конструктивная схема части узла очистки на базовой станции в другом примерном варианте реализации;
[0051] На фиг. 15D показана конструктивная схема части узла очистки на базовой станции в другом примерном варианте реализации;
[0052] На фиг. 16 показана конструктивная схема узла очистки на базовой станции в разрезе в одном из примерных вариантов реализации;
[0053] На фиг. 17 представлена конструктивная схема изоляции между резервуаром для жидкости и краном для долива воды, а также первой позиционирующей части в системе робота-уборщика в примерном варианте реализации;
[0054] На фиг. 18 показана конструктивная схема крана для долива воды и первой позиционирующей части на базовой станции в одном примерном варианте реализации;
[0055] На фиг. 19 показана конструктивная схема базовой станции в одном положении в другом примерном варианте реализации;
[0056] На фиг. 20 показана конструктивная схема базовой станции в другом положении в другом примерном варианте реализации;
[0057] На фиг. 21 показана конструктивная схема соединения робота-уборщика и базовой станции в системе робота-уборщика в одном из примерных вариантов реализации;
[0058] На фиг. 22 показана конструктивная схема соединения робота-уборщика и части базовой станции в системе робота-уборщика в одном из примерных вариантов реализации;
[0059] На фиг. 23 показана конструктивная схема части базовой станции в одном из примерных вариантов реализации;
[0060] Пояснения к обозначениям на чертежах
[0061] 10. Робот-уборщик; 110. Основной корпус робота; 111. Передняя часть; 112. Задняя часть; 120. Сенсорная система; 121. Устройство определения; 122. Буфер; 1221. Сквозное отверстие; 130. Модуль управления; 140. Система привода; 141. Модуль ведущего колеса; 142. Ведомое колесо; 150. Уборочная система; 151. Система сухой уборки; 152. Боковая щетка; 160. Система питания; 170. Система человеко-машинного взаимодействия; 400. Система влажной уборки; 410. Чистящая головка; 420. Блок привода; 421. Платформа привода; 422. Опорная платформа; 4217. Водовыпускное устройство; 4218. Труба насоса для чистой воды; 4219. Насос для чистой воды; 12. Первый зарядный контакт; 13. Резервуар для жидкости; 14. Вторая позиционирующая часть; 16. Отверстие для долива воды; 17. Клапан; 18. Трубопровод; 19. Вращающийся вал; 20. Корпус базовой станции; 21. Очистной бак; 211. Сливное отверстие; 22. Нижняя направляющая поверхность; 221. Противоскользящий выступ; 222. Удлинительная пластина; 23. Боковая направляющая поверхность; 231. Боковая поверхность; 232. Средняя поверхность; 24. Верхняя направляющая поверхность; 25. Направляющая нажимная колодка; 26. Направляющее колесо; 27. Направляющий мост; 30. Узел очистки; 31. Первый чистящий элемент; 311. Первый вращающийся вал; 32. Второй чистящий элемент; 33. Держатель узла очистки; 34. Приводная часть; 341. Шестерня; 342. Зубчатая рейка; 343. Второй вращающийся вал; 35. Отверстие для выпуска жидкости; 36. Устройство для выпуска жидкости; 371. Первая шестерня; 372. Вторая шестерня; 373. Третья шестерня; 374. Четвертая шестерня; 375. Пятая шестерня; 376. Шестая шестерня; 377. Седьмая шестерня; 378. Восьмая шестерня; 379. Девятая шестерня; 40. Второй зарядный контакт; 50. Кран для долива воды; 51. Основная часть корпуса; 52. Уплотнительная часть; 53. Соединительная часть; 60. Первая позиционирующая часть; 61. Полая камера; 70. Блок подачи жидкости; 71. Приемный бак.
Конкретные примеры реализации
[0062] Типичные варианты реализации, в которых отражены характеристики и преимущества данного изобретения, будут подробно описаны ниже. Следует понимать, что данное изобретение в разных вариантах реализации может иметь модификации, которые не выходят за рамки данного изобретения, описание и чертежи по существу предназначены для иллюстрации, а не для ограничения этого изобретения.
[0063] Ниже приводится описание различных примерных вариантов реализации настоящего изобретения со ссылкой на схемы, которые являются частью изобретения и на которых в качестве примеров показаны различные конструкции, системы и этапы множества аспектов настоящего изобретения. Следует понимать, что могут быть использованы и другие особые решения с применением компонентов, конструкций, примерных устройств, систем и этапов, а также возможны модификации конструкции и функций без отклонения от сферы применения настоящего изобретения. Более того, хотя в данном описании для описания различных примерных признаков и элементов данного изобретения используются термины "над", "между", "внутри" и т.д., они предназначены только для удобства, например, для обозначения направления на схемах. Ничто в данном описании не должно пониматься как требование конкретной трехмерной ориентации конструкции, чтобы она могла попасть в объем настоящего изобретения.
[0064] Как показано на фиг. с 1 по 23, система робота-уборщика в вариантах реализации изобретения может включать в себя робота-уборщика 10 и базовую станцию.
[0065] В варианте реализации изобретения, как показано на фиг. 3 и фиг. 4, робот-уборщик 10 может включать в себя корпус ПО, систему датчиков 120, модуль управления 130, приводную систему 140, уборочную систему 150, систему питания 160 и систему человеко-машинного взаимодействия 170.
[0066] Как показано на фиг. 3, корпус ПО включает в себя переднюю часть 111 и заднюю часть 112, которые имеют почти круглую форму (как передняя, так и задняя часть), а также могут иметь другие формы, включая, без ограничений, почти D-образную форму с округлой задней стороной, а также прямоугольную или квадратную форму.
[0067] Как показано на фиг. 3, система датчиков 120 включает в себя устройство определения местоположения 121, расположенное на основном корпусе ПО, датчик столкновения, расположенный на буфере 122 передней части 111 основного корпуса ПО, датчик приближения, датчик обрыва, расположенный в нижней части основного корпуса, а также магнитометр, акселерометр, гироскоп, дистанциометр и другие датчики, расположенные внутри основного корпуса и используемые для предоставления различной информации о местоположении и о движении машины в модуль управления 130. Устройство определения местоположения 121 включает в себя, без ограничений, камеру, лазерный дальномер (LDS, полное название "лазерный датчик расстояния").
[0068] Как показано на фиг. 3, передняя часть 111 корпуса ПО может иметь буфер 122, во время уборки модуль ведущего колеса 141 толкает вперед робота-уборщика 10 по поверхности, с помощью размещенной на буфере 122 сенсорной системы, например инфракрасного датчика, обнаруживая одно или несколько событий на пути движения робота-уборщика 10; робот-уборщик 10 может на основе таких событий, обнаруженных буфером 122, как препятствия и стены, управлять модулем ведущего колеса 141 так, чтобы робот-уборщик 10 реагировал на события, например, держался подальше от препятствий.
[0069] Модуль управления 130 расположен на системной плате внутри основного корпуса 110, включает в себя энергонезависимую память, такую как жесткий диск, флэш-память, запоминающее устройство с произвольным доступом, и вычислительный процессор для связи, такой как центральный процессор, процессор приложений; процессор приложений использует алгоритмы определения местоположения на основе информации о препятствиях, полученной от лазерного дальномера, такие как одновременная локализация и картирование (SLAM, полное название "одновременная локализация и картирование"), для построения мгновенной карты окружающей среды, в которой находится робот-уборщик 10. И в соответствии с информацией о расстоянии и скорости, полученной от таких датчиков, установленных на буфере 122, как датчики, датчики обрыва, магнитометры, акселерометры, гироскопы и дистанциометры, в комплексе определяет, в каком рабочем состоянии и в каком месте находится робот-уборщик 10 в данный момент, и текущее положение робота-уборщика 10, например, пересечение порога, попадание на ковер, нахождение в месте обрыва, застревание вверху или внизу, заполненный пылесборник, поднятие и т.д.; для различных ситуаций также составляется план конкретных последующих действий, чтобы робот-уборщик 10 лучше убирался и был удобнее для пользователя.
[0070] Как показано на фиг. 4, приводная система 140 может управлять перемещением корпуса 110 по поверхности на основе команд, содержащих информацию о расстоянии и угле (такую как компоненты х, у и θ). Приводная система 140 включает в себя модуль ведущего колеса 141, который может одновременно управлять левым и правым колесами; для более точного управления движением оборудования модуль ведущего колеса 141 включает в себя модуль левого ведущего колеса и модуль правого ведущего колеса. Модуль левого ведущего колеса и модуль правого ведущего колеса расположены вдоль поперечной оси, которая определяется корпусом оборудования 110. Для того чтобы робот-уборщик 10 мог более устойчиво передвигаться по поверхности или быть более маневренным, он может включать в себя одно или несколько ведомых колес 142, которые включают в себя, помимо прочего, всенаправленное колесо. Модуль ведущего колеса включает в себя ходовое колесо, приводной двигатель и схему управления приводным двигателем; модуль ведущего колеса также может быть подключен к схеме измерения тока возбуждения и дистанциометру. Модуль ведущего колеса 141 может иметь разъемное соединение с корпусом ПО оборудования для удобства демонтажа и технического обслуживания. Ведущее колесо может иметь систему подвески с возможностью смещения и опускания вниз, которая крепится подвижным образом, например, с возможностью вращения, к корпусу 110 оборудования и принимающую пружинное смещение вниз и от корпуса 110 оборудования. Пружинное смещение позволяет ведущему колесу с определенной силой поддерживать контакт с поверхностью и растягиваться, при этом уборочный элемент робота-уборщика 10 также контактирует с поверхностью с определенным давлением.
[0071] Система питания может включать в себя перезаряжаемые батареи, такие как никель-металлогидридные и литиевые батареи. Перезаряжаемые батареи могут подключаться к схеме управления зарядкой, схеме определения температуры зарядки батарейного блока, схеме контроля падения напряжения батареи; схема управления зарядкой, схема определения температуры зарядки батарейного блока и схема контроля падения напряжения батареи затем подключаются к цепи управления микроконтроллера. Главное устройство соединяется с зарядной станцией для зарядки через зарядный электрод, расположенный сбоку или внизу корпуса.
[0072] Система человеко-машинного взаимодействия 170 включает в себя кнопки на панели главного блока для выбора функций пользователем; также она может включать в себя экран и/или индикаторы и/или динамики; экран, индикаторы и динамики помогают пользователю понять текущее состояние машины или выбирать функции; также система может включать в себя мобильное клиентское приложение. Если автоматическое уборочное оборудование оснащено функцией навигации по маршруту, мобильный клиент может показывать пользователям карту окружения, в котором находится оборудование, а также местоположение уборочного оборудования, реализуя более широкий и персонифицированный пользовательский функционал.
[0073] Уборочная система может представлять собой систему сухой уборки 151 и/или систему влажной уборки 400.
[0074] Как показано на фиг. 4, система сухой уборки 151, представленная в данном варианте реализации, может включать в себя валиковую щетку, пылесборник, вентилятор и воздуховыпускное отверстие. Валиковая щетка, которая в определенной степени контактирует с полом, подметает мусор с пола и перемещает его к отверстию для всасывания пыли между валиковой щеткой и пылесборником, а затем мусор всасывается в пылесборник потоком воздуха, создаваемым вентилятором и проходящим через пылесборник. Способность робота-уборщика 10 к удалению пыли можно охарактеризовать эффективностью уборки мусора (DPU, полное название "эффективность сбора пыли"); на эффективность уборки влияют конструкция и материал валиковой щетки, а также отверстие для всасывания пыли, пылесборник, вентилятор, воздуховыпускное отверстие и коэффициент использования воздуха в воздуховоде, образованном их соединительными частями, тип и мощность вентилятора, и это сложная проблема проектирования системы. По сравнению с обычными подключаемыми пылесосами, для автоматического уборочного оборудования с ограниченным питанием повышение эффективности удаления пыли имеет большое значение. Повышение эффективности удаления пыли напрямую и эффективно снижает энергозатраты, то есть если раньше одна зарядка позволяла убирать 80 кв. метров площади, то теперь это может быть 180 кв. метров или даже больше. Кроме того, уменьшение частоты зарядка значительно увеличивает срок службы батарей, так снижает частоту замены батарей пользователем. Более очевидно и важно то, что повышение эффективности удаления пыли является наиболее заметным и важным для пользователя, и пользователь может непосредственно сделать вывод о том, насколько качественно выполнена уборка. Модуль сухой уборки может также включать в себя боковую щетку 152, имеющую ось вращения, которая располагается под определенным углом по отношению к земле, для перемещения мусора в зону валиковой щетки уборочной системы 150.
[0075] Как показано на фиг. 4-8, система влажной уборки 400, представленная в варианте реализации, может включать в себя чистящую головку 410, приводной блок 420, механизм подачи воды, резервуар 13 для жидкости и пр. При этом чистящая головка 410 может быть расположена под резервуаром 13 для жидкости, а чистящая жидкость внутри резервуара 13 для жидкости может подаваться на чистящую головку 410 через механизм подачи воды, чтобы чистящая головка 410 могла выполнять влажную уборку убираемой поверхности. В других вариантах реализации настоящего изобретения чистящая жидкость внутри резервуара 13 для жидкости также может распыляться непосредственно на убираемую поверхность, после чего равномерно распределяться с помощью чистящей головки 410 для последующей уборки.
[0076] При этом чистящая головка 410 используется для очистки убираемой поверхности, приводной блок 420 используется для приведения чистящей головки 410 практически в возвратно-поступательное движение вдоль целевой поверхности, которая является частью убираемой поверхности. Чистящая головка 410 совершает возвратно-поступательное движение вдоль убираемой поверхности, и поверхность контакта между чистящей головкой 410 и убираемой поверхностью снабжена чистящей тканью или чистящей пластиной, которые создают высокочастотное трение с убираемой поверхностью посредством возвратно-поступательного движения, тем самым удаляя пятна на убираемой поверхности.
[0077] Чем выше частота трения, тем больше раз трения в единицу времени; высокочастотное возвратно-поступательное движение, также известное как возвратно-поступательное движение с вибрацией, обладает очищающей способностью, намного превышающей такую способность при обычном возвратно-поступательном движении, например, вращении и очистке трением; как вариант, частота трения близка к звуковой волне, и эффект очистки будет быть намного выше, чем при очистке трением с вращением десятки раз в минуту. С другой стороны, ворсинки на поверхности чистящей головки 410 более аккуратно и равномерно вытягиваются в одном направлении под действием высокочастотной вибрации, поэтому общий эффект очистки более равномерный в отличие от того, когда при низкочастотном вращении прилагается только давление сверху вниз для увеличения силы трения и эффекта очистки; сила давления сверху вниз сама по себе не заставляет ворсинки вытягиваться почти в одном направлении; эффект проявляется в том, что водяные следы на убираемой поверхности после высокочастотной вибрационной очистки становятся более равномерными и не оставляют беспорядочных водяных разводов.
[0078] Возвратно-поступательное движение может быть повторяющимся движением в любом одном или нескольких направлениях в пределах убираемой поверхности, или это может быть вибрация, перпендикулярная убираемой поверхности, здесь нет строгих ограничений. Как вариант, направление возвратно-поступательного движения уборочного модуля примерно перпендикулярно направлению перемещения машины, поскольку направление возвратно-поступательного движения, параллельное движению машины, вызовет нестабильность движения самой машины, поскольку тяга и сопротивление в направлении движения могут привести к проскальзыванию приводного колеса, последствия такого проскальзывания наиболее очевидны при работе модуля влажной уборки, поскольку скользкая убираемая поверхность увеличивает вероятность проскальзывания, которое влияет не только на плавность хода и уборки машины, но и приводит к неточным показаниям таких датчиков, как одометр и гироскопы, что приводит к тому, что автоматическое уборочное оборудование с функцией навигации не сможет точно определять местоположение и создавать карту; если проскальзывание будет частым, воздействие на SLAM будет таким, что его нельзя игнорировать, поэтому необходимо максимально избегать вероятности проскальзывания машины. Помимо проскальзывания, компонента движения чистящей головки 410 в направлении движения машины приводит к тому, что машину во время движения постоянно толкает вперед и назад, делая его дерганным, неустойчивым и неровным.
[0079] В варианте реализации данного изобретения, как показано на фиг. 5, приводной блок 420 может также включать в себя приводную платформу 421, соединенную с нижней поверхностью корпуса ПО оборудования, для обеспечения движущей силы; опорную платформу 422, разъемно соединенную с приводной платформой 421, для поддержки чистящей головки 410 и ее подъема и опускания под действием приводной платформы 421.
[0080] В дополнительном варианте реализации настоящего изобретения система влажной уборки 400 может соединяться с корпусом ПО оборудования через активный модуль подъемника. Когда система влажной уборки 400 временно не участвует в работе, например, робот-уборщик 10 находится на базовой станции, чтобы промыть чистящую головку 410 системы влажной уборки 400 и долить воды в резервуар 13 для жидкости; или когда он сталкивается с убираемой поверхностью, на которой невозможно выполнить уборку с помощью системы влажной уборки 400, активный модуль подъемника поднимает систему влажной уборки 400 вверх.
[0081] В системе влажной уборки 400 в данном варианте реализации чистящая головка 410, приводная платформа 421, опорная платформа 422, механизм подачи воды и резервуар 13 для жидкости могут приводиться в действие одним или несколькими двигателями. Система питания 160 обеспечивает питание и приводит в движение двигатель и работает в целом под управлением модуля управления 130.
[0082] При этом механизм подачи воды в данном варианте реализации может включать в себя водовыпускное устройство, которое может прямо или косвенно соединяться с отверстием для выпуска жидкости резервуара 13 для жидкости, при этом, как показано на фиг. 10, чистящая жидкость может через выпускное отверстие для чистящей жидкости в резервуаре для жидкости перетекать в водовыпускное устройство 4217, которое равномерно распределяет чистящую жидкость по убираемой поверхности. Водовыпускное устройство может быть снабжено соединительным элементом и с его помощью соединяться с отверстием для выпуска чистящей жидкости из резервуара для жидкости. Водовыпускное устройство снабжено распределительным отверстием, которое может представлять собой одно сплошное отверстие или комбинацию нескольких раздельных небольших отверстий, в распределительном отверстии может быть предусмотрено несколько форсунок. Чистящая жидкость через элемент, соединяющий отверстие для чистящей жидкости резервуара для жидкости и водовыпускное отверстие попадает на распределительное отверстие, через которое равномерно наносится на убираемую поверхность.
[0083] Как показано на фиг. 5 и фиг. 10, механизм подачи воды может также включать в себя насос для чистой воды 4219 и/или трубку для насоса чистой воды 4218; насос для чистой воды 4219 может соединяться с отверстием для выпуска чистящей жидкости в резервуаре для жидкости непосредственно или через трубку 4218 насоса для чистой воды.
[0084] Насос 4219 для чистой воды может соединяться с соединительным элементом водовыпускного устройства и забирать чистящую жидкость из резервуара для жидкости в водовыпускное устройство. Насос для чистой воды может быть шестеренчатым насосом, лопастным насосом, плунжерным насосом, перистальтическим и другим насосом.
[0085] Механизм подачи воды забирает чистящую жидкость из резервуара для жидкости через насос 4219 для чистой воды и трубку 4218 насоса для чистой воды и направляет ее к водовыпускному устройству, водовыпускным устройством 4217 может быть насадка, распылительное отверстие, ткань для пропитывания и т.д., благодаря чему вода равномерно распределяется по чистящей головке 410, смачивая ее и убираемую поверхность. После смачивания загрязнения на убираемой поверхности удаляются легче. В системе влажной уборки 400 можно регулировать мощность/скорость потока водяного насоса.
[0086] В данном варианте реализации резервуар 13 для жидкости может также включать в себя отверстие для долива воды 16, как показано на фиг. 7-9, отверстие для долива воды 16 может находиться на боковой стенке бачка для воды, и когда робот-уборщик 10 находится на базовой станции, базовая станция может закачивать воду через отверстие для долива воды 16 в резервуар 13 для жидкости робота-уборщика 10.
[0087] В данном варианте реализации, как показано на фиг. 7, резервуар 13 для жидкости может быть снабжен вторым блоком 14 позиционирования, который используется для соединения с базовой станцией, чтобы базовая станция могла закачивать воду в резервуар 13 для жидкости робота-уборщика 10 через отверстие для долива воды 16.
[0088] В данном варианте реализации, как показано на фиг. 8, отверстие для долива воды 16 в резервуаре 13 для жидкости может быть снабжено клапаном 17, который может открываться и закрываться, соединяя и разъединяя отверстие для долива воды 16 и резервуар 13 для жидкости. Резервуар 13 для жидкости снабжен трубопроводом 18, на одном конце которого имеется клапан 17.
[0089] В данном варианте реализации клапан 17 может быть электронным или ручным, открытием и закрытием которого управляют соответствующим образом. В других вариантах реализации настоящего изобретения клапан 17 также может быть обратным клапаном; когда долив жидкость в резервуар 13 для жидкости завершается, соединение между отверстием для долива жидкости 16 и резервуаром 13 для жидкости разрывается, клапан 17 автоматически закрывается, предотвращая вытекание чистящей жидкости из резервуара для жидкости 13. Например, клапан 17 может быть трехходовым клапаном, подъемным обратным клапаном, поворотным обратным клапаном и т.д.
[0090] В данном варианте реализации робот-уборщик 10 также включает в себя первый зарядный контакт 12, который может быть расположен на основном корпусе ПО и соединяться с системой питания робота-уборщика 10, и когда робот-уборщик 10 находится на базовой станции, базовая станция может заряжать систему питания робота-уборщика 10 через первый зарядный контакт 12. В данном варианте реализации первый зарядный контакт 12 может быть расположен сбоку корпуса робота-уборщика 10; такое расположение позволяет предотвратить загрязнение первого зарядного контакта 12 грязной водой, собранной с поверхности, а также предотвратить попадание воды на зарядный контакт и повреждение робота-уборщика 10, когда робот-уборщик 10, находясь на базовой станции, закачивает воду в резервуар 13 для жидкости или промывает уборочную систему 150.
[0091] В данном варианте реализации, как показано на фиг. 11 и фиг. 12, базовая станция может включать в себя корпус базовой станции 20 и узел очистки 30, который может подвижно размещаться на корпусе базовой станции 20; узел очистки 30 включает в себя первый чистящий элемент 31 и второй чистящий элемент 32, отличный от первого чистящего элемента 31, где первый чистящий элемент 31 и второй чистящий элемент 32 путем взаимодействия с уборочной системой 150 очищают ее от мусора.
[0092] В данном варианте реализации, когда робот-уборщик 10 достигает корпуса базовой станции 20, узел очистки 30 находится напротив уборочной системы 150 и перемещается относительно корпуса базовой станции 20; первый чистящий элемент 31 и второй чистящий элемент 32 путем взаимодействия с уборочной системой 150 очищают ее от мусора, то есть робот-уборщик 10 может осуществлять автоматическую самоочистку на узле очистки 30.
[0093] В данном варианте реализации, как показано на фиг. 11 и фиг. 12, узел очистки 30 также включает в себя держатель 33 узла очистки, который подвижно расположен на корпусе базовой станции 20, первый чистящий элемент 31 и второй чистящий элемент 32 расположены на держателе 33 узла очистки, т.е. держатель 33 узла очистки используется в качестве подвижной части, чтобы первый чистящий элемент 31 и второй чистящий элемент 32 могли перемещаться вместе с ним, в разных местах контактируя с уборочной системой 150, тем самым очищая ее.
[0094] В данном варианте реализации первый чистящий элемент 31 и второй чистящий элемент 32 расположены параллельно на держателе 33 узла очистки. Второй чистящий элемент 32 может находиться параллельно на любой стороне первого чистящего элемента 31, а если вторых чистящих элементов 32 несколько, они могут распределяться параллельно на любой стороне или с обеих сторон первого чистящего элемента 31.
[0095] В одном из вариантов реализации настоящего изобретения первый чистящий элемент 31 включает в себя чистящий ролик, который установлен с возможностью вращения относительно держателя 33 узла очистки. На внешней поверхности чистящего ролика установлена щетка и/или лопатка. Второй чистящий элемент 32 включает в себя чистящий скребок.
[0096] В данном варианте реализации, когда робот-уборщик 10 перемещается к корпусу базовой станции 20, узел очистки 30 может перемещаться относительно корпуса базовой станции 20; при этом чистящий ролик с помощью щеток и/или лопаток, расположенных на внешней поверхности, во время вращения взаимодействует с уборочной системой 150 робота-уборщика 10; чистящий скребок установлен так, чтобы взаимодействовать с уборочной системой 150 робота-уборщика 10 во время перемещения относительно корпуса 20 базовой станции.
[0097] В данном варианте реализации, как описано ранее, уборочная система 150 робота-уборщика 10 может включать в себя систему сухой уборки 151 и систему влажной уборки 400. Далее подробно описывается процесс очистки системы влажной уборки 400 на роботе-уборщике 10 узлом очистки 30 на базовой станции.
[0098] Как показано на фиг. 1, когда робот-уборщик 10 перемещается к корпусу 20 базовой станции, система влажной уборки 400 робота-уборщика 10 фиксируется неподвижно относительно корпуса 20 базовой станции. Узел очистки 30 на базовой станции контактирует с чистящей головкой 410 системы влажной уборки 400 на роботе-уборщике 10. В других вариантах реализации настоящего изобретения система влажной уборки 400 на роботе-уборщике 10 может перемещаться вверх и вниз при помощи активного модуля подъемника. Следовательно, когда робот-уборщик 10 находится на базовой станции для очистки, можно регулировать положение активного модуля подъемника так, чтобы обеспечить лучший контакт между узлом очистки 30 на базовой станции и чистящей головкой 410 системы влажной уборки на роботе-уборщике 10. Например, в одном варианте реализации настоящего изобретения система влажной уборки 400 на роботе-уборщике 10 может быть очищена, когда она полностью поднята. В других вариантах реализации настоящего изобретения система влажной уборки 400 на роботе-уборщике 10 может быть очищена в других положениях подъема. При этом положение подъема системы влажной уборки 400 может регулироваться в зависимости от материала чистящей головки 410 системы влажной уборки 400, например, если чистящая головка 410, которую необходимо очистить, имеет небольшой коэффициент трения, контакт между чистящей головкой 410 и узлом очистки 30 может быть более плотным, так что при перемещении узла очистки 30 относительно корпуса 20 базовой станции сила трения между чистящей головкой 410 и узлом очистки 30 будет находиться в определенном диапазоне, способствуя очистке; верно и обратное. Кроме того, положение подъема системы влажной уборки 400 можно регулировать в зависимости от степени загрязнения чистящей головки 410 системы влажной уборки 400, например, если чистящая головка 410, которую необходимо очистить, сильно загрязнена, контакт между чистящей головкой 410 и узлом очистки 30 становится более плотным, так что между чистящей головкой 410 и узлом очистки 30 образуется сильное трение, обеспечивая более эффективное удаление мусора с чистящей головки 410; верно и обратное. В данном варианте реализации положение подъема системы влажной уборки 400 может регулироваться пользователем в зависимости от фактической ситуации, или в определенном месте, например, на чистящей головке 410 системы влажной уборки 400 и пр. можно установить датчик, который будет подавать определенный сигнал на модуль управления 130 роботом-уборщиком 10, а модуль управления 130 на основе результатов, полученных от датчика, будет автоматически регулировать положение подъема системы влажной уборки 400. В других вариантах реализации настоящего изобретения положение подъема системы влажной уборки 400 также может регулироваться другими способами, в настоящем изобретении на это нет ограничений. В других вариантах реализации настоящего изобретения добиться лучшего контакта между узлом очистки 30 и чистящей головкой 410 системы влажной уборки 400 робота-уборщика 10 также можно путем регулировки положения подъема узла очистки 30, в данном изобретении на это нет ограничений.
[0099] Когда робот-уборщик 10 зафиксирован на корпусе 20 базовой станции, чистящая головка 410 системы влажной уборки 400 на роботе-уборщике 10 плотно контактирует с узлом очистки 30 на базовой станции, который может выполнять очистку системы влажной уборки 400 на роботе-уборщике 10. В данном варианте реализации, как показано на фиг. 15А, узел очистки 30 включает в себя первый чистящий элемент 31 в виде ролика и второй чистящий элемент 32 в виде скребка. В других вариантах реализации настоящего изобретения узел очистки может также включать в себя устройство 36 для выпуска жидкости; во время очистки системы влажной уборки 400 на роботе-уборщике 10 узлом очистки 30 на нем может одновременно работать устройство для выпуска жидкости, разбрызгивая чистящую жидкость на первый чистящий элемент 31, а первый чистящий элемент 31 посредством контакта с чистящей головкой 410 системы влажной уборки 400 на роботе-уборщике 10 и собственного вращения равномерно наносит чистящую жидкость на чистящую головку 410 системы влажной уборки 400. Кроме того, первым чистящим элементом 31 может быть щеточный валик или мягкий резиновый ролик с лопаткой, а чистящая головка 410 системы влажной уборки 400 на роботе-уборщике 10 может состоять из мягкой ткани, изготовленной из волокнистого материала или хлопка, или губки. Во время очистки щетинки или лопатка первого чистящего элемента 31 могут проникать глубоко внутрь чистящей головки 410, полностью контактируя с ней и очищая ее от мусора. Кроме того, первый чистящий элемент 31 может вращаться, одновременно двигаясь влево и вправо, а его щетинки или лопатка при вращении могут создавать эффект выбивания чистящей головки 410 системы влажной уборки 400, выбивая и вытряхивая из нее мусор под воздействием создаваемой вибрации. В то же время, работая вместе с первым чистящим элементом 31, скребок второго чистящего элемента 32 соскребает мусор, который выносится или вытряхивается из чистящей головки 410 системы влажной уборки 400, а также грязную воду с чистящей головки 410. В других вариантах реализации настоящего изобретения первый чистящий элемент 31 может одновременно с движением влево и вправо поворачиваться в разных направлениях. Например, когда первый чистящий элемент 31 перемещается влево относительно корпуса 20 базовой станции, он может одновременно вращаться по часовой стрелке; когда первый чистящий элемент 31 перемещается вправо относительно корпуса 20 базовой станции, он может одновременно вращаться против часовой стрелки.
[00100] Как упоминалось ранее, система влажной уборки 400 уборочной системы 150 может совершать возвратно-поступательное движение относительно корпуса 20 базовой станции. В данном варианте реализации во время движения узла очистки 30 относительно корпуса 20 базовой станции система влажной уборки 400 на роботе-уборщике 10 может быть неподвижной или также совершать соответствующее возвратно-поступательное движение, следуя за движениями узла очистки 30 для обеспечения быстрой очистки системы влажной уборки 400. Например, когда узел очистки 30 перемещается влево относительно корпуса 20 базовой станции, система влажной уборки 400 на роботе-уборщике 10 может перемещаться вправо относительно корпуса 20 базовой станции, чтобы увеличить относительную скорость перемещения между узлом очистки 30 и системой влажной уборки 400 для повышения эффективности уборки. Верно и обратное.
[00101] В данном варианте реализации первый чистящий элемент 31 и второй чистящий элемент 32 установлены с возможностью синхронного движения.
[00102] Как показано на фиг. 15А, первый чистящий элемент 31 и второй чистящий элемент 32 расположены на держателе 33 узла очистки 30, который приводит в синхронное движение первый чистящий элемент 31 и второй чистящий элемент 32 в одном направлении, в результате чего первый чистящий элемент 31 и второй чистящий элемент 32 по очереди очищают уборочную систему 150. В других вариантах реализации настоящего изобретения первый чистящий элемент 31 и второй чистящий элемент 32 могут находиться на разных держателях; в этом случае раздельное управление движением держателей позволяет отдельно управлять движением первого чистящего элемента 31 и второго чистящего элемента 32, которые в этом случае двигаются несихронно. Например, можно сделать так, чтобы первый чистящий элемент 31 или второй чистящий элемент 32 работали отдельно; или при промывке чистящей головки 410 в одном и том же положении первый чистящий элемент 31 и второй чистящий элемент 32 в зависимости от фактической ситуации работают с разницей по времени. В данном изобретении это не ограничивается.
[00103] Как описано ранее, узел очистки 30 может включать в себя один или несколько первых чистящих элементов 31 и вторых чистящих элементов 32. Например, в одном из вариантов реализации настоящего изобретения узел очистки 30 может включать в себя два первых чистящих элемента 31 и один второй чистящий элемент 32, при этом первые чистящие элементы 31 располагаются по обе стороны от второго чистящего элемента 32, как показано на фиг. 15С. В данном варианте реализации во время возвратно-поступательного движения узла очистки 30 первый чистящий элемент 31 может всегда находиться перед вторым чистящим элементом 32. При таком расположении, когда узел очистки 30 очищает чистящую головку 410 системы влажной уборки 400 на роботе-уборщике, первый чистящий элемент 31 может первым очищать часть чистящей головки 410, то есть щетинки или лопатка первого чистящего элемента 31 могут ударять по чистящей головке 410 при вращении первого чистящего элемента 31, выбивая или соскребая мусор, скрытый в чистящей головке 410, в результате создаваемой ударами вибрации; а затем скребок второго чистящего элемента 32 может соскребать мусор, выбитый из чистящей головки 410, а также грязную воду, обеспечивая более тщательную очистку чистящей головки 410.
[00104] В данном варианте реализации, как показано на фиг. 15А и фиг. 16, узел очистки 30 дополнительно содержит приводную часть 34, которая соединяется с держателем 33 узла очистки, а приводная часть 34 соединяется с корпусом 20 базовой станции и приводит в движение держатель 33 узла очистки относительно корпуса 20 базовой станции.
[00105] Как вариант, как показано на фиг. 15А и фиг. 15В, приводная часть 34 и держатель 33 узла очистки перемещаются синхронно относительно корпуса 20 базовой станции, то есть приводная часть 34 может включать в себя двигатель и шестерню 341, двигатель вращает шестерню 341, а корпус 20 базовой станции может быть снабжен зубчатой рейкой 342, шестерня 341 перемещается вдоль рейки 342, чтобы приводная часть 34 и держатель 33 узла очистки перемещались синхронно на корпусе 20 базовой станции. Как вариант, на обоих концах держателя 33 узла очистки может быть предусмотрена зубчатая рейка 342, соответственно, шестерен 341 может быть по меньшей мере две, причем по меньшей мере две шестерни 341 входят в зацепление с двумя зубчатыми рейками 342.
[00106] Кроме того, как упоминалось ранее, когда узел очистки 30 перемещается относительно корпуса 20 базовой станции, первый чистящий элемент 31 узла очистки 30 также вращается, и приводная часть 34 соединяется с первым чистящим элементом 31 для приведения его во вращение относительно держателя 33 узла очистки; при этом, когда держатель 33 узла очистки перемещается относительно корпуса 20 базовой станции, первый чистящий элемент 31 поворачивается относительно держателя 33 узла очистки. В одном из вариантов реализации настоящего изобретения можно использовать двигатель для одновременного движения узла очистки 30 относительно корпуса 20 базовой станции и вращения первого чистящего элемента 31. В частности, выходной вал двигателя соединяется с шестерней 341 и первым чистящим элементом 31 через узел зубчатой передачи, и когда двигатель работает, он одновременно приводит во вращение шестерню 341 и первый чистящий элемент 31, в это время шестерня 341 перемещается вдоль направления установки зубчатой рейки, и первый чистящий элемент 31 вращается самостоятельно. Узел зубчатой передачи устанавливается в соответствии с фактическими требованиями к скорости, здесь нет ограничений. Узел зубчатой передачи включает в себя шестерню и соединительный вал; кроме того, узел зубчатой передачи может также включать в себя конвейерную ленту, цепь и другие компоненты, здесь нет ограничений при условии, если двигатель сможет приводить во вращение одновременно и шестерню 341, и первый чистящий элемент 31. В некоторых вариантах реализации настоящего изобретения не исключено, что для перемещения узла очистки 30 относительно корпуса 20 базовой станции и самовращения первого чистящего элемента 31 могут использоваться два двигателя.
[00107] Как вариант, приводная часть 34 может крепиться неподвижно на корпусе 20 базовой станции и представлять собой воздушный или масляный цилиндр, телескопическая трубка приводной части 34 соединяется с держателем 33 узла очистки и приводит его в движение на корпусе 20 базовой станции 20 посредством выдвижения и втягивания. В других вариантах реализации настоящего изобретения приводная часть 34 также может быть электрическим цилиндром или комбинацией двигателя и конвейерной ленты, при условии, что она может приводить в движение держатель 33 узла очистки, в настоящем изобретении это не ограничивается. Как упоминалось ранее, первый чистящий элемент 31 и второй чистящий элемент 32 в данном варианте реализации могут находиться на разных держателях, двигаясь асинхронно; по этой причине держатели первого чистящего элемента 31 и второго чистящего элемента 32 могут иметь отдельные приводные части. В данном изобретении это не ограничивается.
[00108] В одном из вариантов реализации настоящего изобретения перемещение узла очистки 30 влево и вправо относительно корпуса 20 базовой станции и вращение первого чистящего элемента 31 осуществляются одной и той же приводной частью, как показано на фиг. 15D. В настоящем варианте реализации перемещение узла очистки 30 влево и вправо чистящего узла 30 и вращение первого чистящего элемента 31 осуществляются приводной частью 34 в сочетании с многоступенчатой шестерней. В настоящем варианте реализации приводная часть 34 может быть двигателем, а узел очистки 30 может также включать в себя узел зубчатой передачи, с помощью которого двигатель приводит в движение держатель 33 узла очистки и одновременно вращает первый чистящий элемент 31, т.е. приводная шестерня 341 и первый чистящий элемент 31 вращаются синхронно.
[00109] Как показано на фиг. 15D, узел зубчатой передачи включает в себя первую шестерню 371, вторую шестерню 372, третью шестерню 373, четвертую шестерню 374, пятую шестерню 375, шестую шестерню 376, седьмую шестерню 377, восьмую шестерню 378 и девятую шестерню 379. Двигатель соединяется с первой шестерней 371, первая шестерня 371 входит в зацепление со второй шестерней 372, вторая шестерня 372 входит в зацепление с третьей шестерней 373, при этом вторая шестерня 372 находится между первой шестерней 371 и третьей шестерней 373, и когда двигатель вращает первую шестерню 371, первая шестерня 371 вращает третью шестерню 373 через вторую шестерню 372. Четвертая шестерня 374 соединяется с третьей шестерней 373 и расположена соосно с третьей шестерней 373, так что третья шестерня 373 приводит четвертую шестерню 374 в синхронное вращение. Четвертая шестерня 374 входит в зацепление с пятой шестерней 375, приводя ее во вращение. Шестая шестерня 376 соединяется с пятой шестерней 375 и расположена соосно с ней, так что пятая шестерня 375 приводит шестую шестерню 376 в синхронное вращение, а первый вал 311, соединяющий шестую шестерню 376 и пятую шестерню 375, приводит во вращение первый чистящий элемент 31. Шестая шестерня 376 входит в зацепление с седьмой шестерней 377, тем самым приводя седьмую шестерню 377 во вращение. Восьмая шестерня 378 соединяется с седьмой шестерней 377 и расположена соосно с ней, так что седьмая шестерня 377 приводит восьмую шестерню 378 во вращение на одной оси. Восьмая шестерня 378 входит в зацепление с девятой шестерней 379, тем самым приводя девятую шестерню 379 во вращение, а второй вал 343, соединенный с девятой шестерней 379, приводит во вращение расположенную на нем шестерню 341, так что шестерня 341 перемещается вдоль зубчатой рейки 342.
[00110] В настоящем варианте реализации двигатель может осуществлять прямое и обратное вращение, приводя в движение держатель 33 узла очистки в двух противоположных направлениях, и в то же время он приводит во вращение первый чистящий элемент 31 в обоих направлениях (т.е. по часовой стрелке и против часовой стрелки). Например, двигатель может приводить в движение держатель 33 узла очистки относительно корпуса 20 базовой станции, перемещая его влево, одновременно приводя во вращение первый чистящий элемент 31 по часовой стрелке; двигатель также может приводить в движение узел очистки 33 относительно корпуса 20 базовой станции, перемещая его влево, одновременно приводя первый чистящий узел 31 во вращение против часовой стрелки. Следует отметить, что тип и размер каждой из вышеперечисленных шестерен здесь не ограничиваются и могут зависеть от фактических потребностей.
[00111] В других вариантах реализации настоящего изобретения узел очистки 30 также может быть установлен в соответствии с формой очищаемого объекта. Как показано на фиг. 5, чистящая головка 410 системы влажной уборки 400 на роботе-уборщике 10 имеет форму веера, для повышения эффективности очистки на узле очистки 30 можно установить такой режим движения, чтобы он двигался подобно щеткам стеклоочистителя, то есть чтобы один конец узла очистки 30 был прикреплен неподвижно к корпусу 20 базовой станции, а другой конец мог совершать возвратно-поступательное движение вокруг неподвижного конца. В данном варианте реализации в этом нет ограничений.
[00112] Корпус 20 базовой станции включает в себя очистной бак 21, узел очистки 30 включает в себя устройство для выпуска жидкости 36, чистящая жидкость, выпускаемая из устройства для выпуска жидкости 36, используется для очистки уборочной системы 150 робота-уборщика 10 и поступает в очистной бак 21. Узел очистки 30 расположен над очистным баком 21.
[00113] В данном варианте реализации устройство для выпуска жидкости 36 на базовой станции устанавливается с возможностью движения, чтобы чистящая жидкость могла более равномерно распыляться или наноситься на уборочную систему 150 робота-уборщика 10, а когда узел очистки 30 промывает уборочную систему 150 на роботе-уборщике 10, чистящая жидкость быстро впитывалась в уборочную систему 150.
[00114] Кроме того, реализация функции очистки уборочной системы 150 предотвращается вытекание и попадание чистящей жидкости во внешнюю среду или в соответствующие силовые компоненты робота-уборщика 10 и возникновение проблем с безопасностью.
[00115] В данном варианте реализации, когда робот-уборщик 10 неподвижно пристыкован к корпусу 20 базовой станции, узел очистки 30 контактирует с уборочной системой 150 робота-уборщика 10 и перемещается относительно корпуса 20 базовой станции и робота-уборщика 10, а чистящая жидкость, выпускаемая через устройство для выпуска жидкости 36, будет смачивать уборочную систему 150 робота-уборщика 10, эффективно очищая ее.
[00116] Следует отметить, что когда узел очистки 30 на базовой станции перемещается, чистящая жидкость, выпускаемая из устройства для выпуска жидкости 36, может использоваться для очистки уборочной системы 150 робота-уборщика 10, то есть чистящая жидкость может убирать мусор и грязь с уборочной системы 150 робота-уборщика 10, в процессе движения устройства для выпуска жидкости 36 равномерно пропитывая уборочную систему 150.
[00117] В данном варианте реализации, как показано на фиг. 12, устройство для выпуска жидкости 36 расположено на держателе 33 узла очистки, то есть держатель 33 узла очистки используется в качестве подвижной части, чтобы устройство для выпуска жидкости 36 могло перемещаться вместе с ним, выпуская чистящую жидкость в разных местах, равномерно пропитывая очищаемый объект. В данном варианте реализации базовая станция дополнительно содержит канал подачи жидкости, один конец которого используется для сообщения с блоком подачи жидкости 70, а другой - с устройством выпуска жидкости 36, чтобы блок подачи жидкости 70 подавал чистящую жидкость в устройство для выпуска жидкости 36 через канал подачи жидкости; при этом как минимум часть канала подачи жидкости установлена так, что двигается вместе с держателем 33 узла очистки. Блок подачи жидкости 70 обеспечивает хранение чистящей жидкости, а канал подачи жидкости является передаточным элементом, который перемещается вместе с держателем 33 узла очистки.
[00118] В данном варианте реализации канал подачи жидкости представляет собой трубу для подачи жидкости, которая соединяется с держателем 33 узла очистки, то есть на держателе 33 узла очистки установлено устройство для выпуска жидкости 36, и оба конца трубы для подачи жидкости по отдельности сообщаются с блоком подачи жидкости 70 и устройством для выпуска жидкости 36, обеспечивая подачу жидкости.
[00119] Как вариант, канал подачи жидкости снабжен насосом, под действием которого чистящая жидкость из блока подачи жидкости 70 транспортируется к устройству для выпуска жидкости 36, в результате чего чистящей жидкости передается определенная ударная сила, тем самым улучшая чистящую способность. В данном варианте реализации контроллер, расположенный на базовой станции, может управлять такими параметрами насоса, как частота выхода воды, скорость потока воды на выходе, время выхода воды и пр. Кроме того, контроллер может подключаться к коммуникационному оборудованию базовой станции, и когда коммуникационное оборудование получает команды от робота-уборщика 10 или удаленного контроллера, например компьютерного устройства, приложения для мобильного телефона и т.д., оно может управлять работой одного или нескольких компонентов базовой станции.
[00120] В данном варианте реализации устройство для выпуска жидкости 36 может иметь несколько отверстий 35 для выпуска жидкости, расположенных с интервалом, через которые выпускается чистящая жидкость, а выпуск жидкости в разных местах повышает эффективность очистки.
[00121] Как вариант, устройство для выпуска жидкости 36 может быть встроено в держатель 33 узла очистки, на котором также может быть множество отверстий 35 для выпуска жидкости, расположенных с интервалом, чтобы обеспечивать выпуск жидкости в разных местах. В других вариантах реализации настоящего изобретения устройство для выпуска жидкости 36 также может быть независимо расположено на держателе 33 узла очистки, упрощая техническое обслуживание и замену устройства для выпуска жидкости 36.
[00122] В других вариантах реализации настоящего изобретения устройство для выпуска жидкости 36 может быть неподвижно установлено на корпусе 20 базовой станции, например, устройство для выпуска жидкости может иметь несколько отверстий 35 для выпуска жидкости, которые расположены вдоль корпуса 20 базовой станции слева направо. Когда узел очистки 30 перемещается относительно корпуса 20 базовой станции вправо и влево, порядок выпуска жидкости и частота выпуска жидкости из отверстия 35 для выпуска жидкости могут устанавливаться в зависимости от направления и скорости движения узла очистки 30, чтобы при промывке узлом очистки 30 системы влажной уборки 400 в роботе-уборщике 10 очищаемые детали предварительно смачивались для повышения эффективности очистки. Кроме того, для отверстий для выпуска жидкости 35 можно использовать устройство регулирования давления воды и/или устройство регулирования температуры воды, которые бы позволяли регулировать давление воды и/или температуру воды на выходе отверстия для выпуска жидкости 35 в зависимости от таких факторов, как степень загрязнения объекта очистки, с целью дальнейшего улучшения качества очистки.
[00123] В других вариантах реализации настоящего изобретения чистящая жидкость может подаваться из узла очистки 13 через резервуар 13 для жидкости робота-уборщика 10. Например, в процессе очистки чистящей головки 410 системы влажной уборки 400 в роботе-уборщике 10 можно использовать водяной насос, установленный в резервуаре 13 для жидкости робота-уборщика 10, для управления объемом воды, подаваемой из резервуара 13 для жидкости на чистящую головку 410, и временем подачи чистящей жидкости. В этом варианте реализации для узла очистки 30 не требуется водовыпускное устройство.
[00124] В данном варианте реализации, как показано на фиг. 13, на очистном баке 21, расположенном под узлом очистки 30, может быть сливное отверстие 211, из которого может выходить чистящая жидкость из очистного бака 21, чтобы обеспечить своевременную замену чистящей жидкости в очистном баке 21.
[00125] В данном варианте реализации, как показано на фиг. 14, базовая станция также включает в себя приемный бак 71, который сообщается с очистным баком 21 через сливное отверстие 211, чтобы грязная вода из очистного бака 21 поступала в приемный бак 71.
[00126] В частности, как показано на фиг. 14 базовая станция также включает в себя блок подачи жидкости 70, который сообщается с отверстием 35 для выпуска жидкости через трубу для подачи жидкости и используется для подачи чистящей жидкости в уборочную систему 150 робота-уборщика 10.
[00127] В данном варианте реализации базовая станция также содержит первый насос и второй насоса, первый насос используется для подачи чистящей жидкости в очистной бак 21; второй насос используется для откачки чистящей жидкости из очистного бака 21. Первый и второй насосы осуществляют подачу и отвод чистящей жидкости, обеспечивая замену чистящей жидкости в очистном баке 21 и эффективность очистки.
[00128] Первый насос соединен с блоком для подачи жидкости 70, чистящая жидкость из которого подается в очистной бак 21 для очистки через отверстие 35 для выпуска жидкости. Второй насос сообщается с приемным баком 71, так что чистящая жидкость из очистного бака 21 перекачивается в приемный бак 71 через сливное отверстие 211.
[00129] В данном варианте реализации первый насос и второй насос могут работать одновременно, первый насос распыляет чистящую жидкость в очистной бак 21, второй насос забирает чистящую жидкость из очистного бака 21, обеспечивая быстрый обмен чистящей жидкости в очистном баке 21.
[00130] В данном варианте реализации первый чистящий элемент 31 и второй чистящий элемент 32 образуют уборочный элемент. Уборочный элемент может располагаться параллельно устройству 36 для выпуска жидкости; при таком расположении узел очистки 30 может иметь компактную конструкцию, в которой при работе чистящего элемента уборочная система 150 робота-уборщика 10 смачивается чистящей жидкостью, выпускаемой из устройства 36 для выпуска жидкости, помогая уборочному элементу очищать уборочную систему 150 робота-уборщика 10.
[00131] Следует отметить, что уборочный элемент располагается параллельно устройству 36 для выпуска жидкости, то есть направление установки уборочного элемента параллельно прямой линии, образованной соединением центральных точек отверстий 35 для выпуска жидкости в устройстве 36 для выпуска жидкости.
[00132] В данном варианте реализации, как показано на фиг. 15А, первый чистящий элемент 31 расположен на держателе 33 узла очистки и убирает мусор из уборочной системы 150 робота-уборщика 10 посредством контакта и перемещения относительно уборочной системы 150. Кроме того, отверстие 35 для выпуска жидкости на устройстве 36 для выпуска жидкости может быть направлено к первому чистящему элементу 31; при таком расположении чистящая жидкость, выпускаемая из отверстия 35 для выпуска жидкости, может сначала распыляться на первый чистящий элемент 31, чтобы первый чистящий элемент 31 мог равномерно наносить чистящую жидкость на уборочную систему 150 робота-уборщика 10. В других вариантах реализации настоящего изобретения чистящая жидкость, выпускаемая из отверстия 35 для выпуска жидкости, также может распыляться непосредственно на уборочную систему 150 робота-уборщика 10, в настоящем изобретении это не ограничивается. В данном варианте реализации первым чистящим элементом 31 может быть чистящий ролик, который вращается вокруг оси, параллельной устройству 36 для выпуска жидкости, такой как щеточный валик или мягкий резиновый ролик.
[00133] В данном варианте реализации, как показано на фиг. 15А, второй чистящий элемент 32 расположен на держателе 33 узла очистки, путем контакта и перемещения относительно уборочной системы 150 вместе с первым чистящим элементом 31 очищает уборочную систему 150 от мусора. Как показано на фиг. 15А, второй чистящий элемент 32 расположен на одной стороне первого чистящего элемента 31 и над устройством 36 для выпуска жидкости. В данном варианте реализации второй чистящий элемент 32 может представлять собой мягкий резиновый скребок или что-то аналогичное.
[00134] В некоторых вариантах реализации настоящего изобретения первый чистящий элемент 31 и второй чистящий элемент 32 могут частично погружаться в чистящую жидкость в очистном баке 21, полностью погружаться в чистящую жидкость или вообще не погружаться в чистящую жидкость в зависимости от уровня жидкости в очистном баке 21.
[00135] При этом, когда первый чистящий элемент 31 и второй чистящий элемент 32 частично погружаются в чистящую жидкость в очистном баке 21, возвратно-поступательное движение первого чистящего элемента 31 также сопровождается вращением; в процессе вращения первый чистящий элемент 31 может извлекать чистящую жидкость из очистного бака 21 и наносить ее на чистящую головку 410 системы влажной уборки 400 на роботе-уборщике 10, обеспечивая таким образом очистку чистящей головки 410, когда водовыпускное устройство на базовой станции не работает. Кроме того, во время возвратно-поступательного перемещения первого чистящего элемента 31 и второго чистящего элемента 32 под действием потока воды они очищаются от загрязнений.
[00136] Когда первый чистящий элемент 31 и второй чистящий элемент 32 полностью погружаются в чистящую жидкость в очистном баке 21, то есть чистящая головка 410 системы влажной уборки 400 на роботе-уборщике 10 может погружаться в чистящую жидкость в очистном баке 21, в случае, если водовыпускное устройство на базовой станции не работает, чистящая головка 410 может очищаться с помощью чистящей жидкости из очистного бака 21. Кроме того, во время возвратно-поступательного перемещения первого чистящего элемента 31 и второго чистящего элемента 32 под действием потока воды они очищаются от загрязнений.
[00137] Когда первый чистящий элемент 31 и второй чистящий элемент 32 вообще не погружаются в чистящую жидкость в очистном баке 21, чистящая головка 410 системы влажной уборки 400 на роботе-уборщике 10 очищается с помощью чистящую жидкость, распыляемой водовыпускным устройством на базовой станции, таким образом обеспечивается защита чистящей головки 410 от вторичного загрязнения мусором из очистного бака 21, поэтому такой вариант можно применять, когда чистящая головка 410 серьезно загрязнена, а также в случаях, когда чистящая жидкость в очистном баке 21 уже использовалась много раз и не заменялась.
[00138] В данном варианте реализации выпускное отверстие 35 для выпуска жидкости в устройстве 36 для выпуска жидкости может быть направлено по меньшей мере или к первому чистящему элементу 31, или ко второму чистящему элементу 32, чтобы чистящая жидкость, выпускаемая из отверстия 35 для выпуска жидкости, могла под напором омывать как минимум либо первый чистящий элемент 31, либо второй чистящий элемент 32. То есть отверстие 35 для выпуска жидкости не служит не только каналом для поступления чистящей жидкости в очистной бак 21, но и для омывания под напором, как минимум, или первого чистящего элемента 31, или второго чистящего элемента 32, или чистящую головку 410 системы влажной уборки 400 на роботе-уборщике, обеспечивая соответствующий результат очистки.
[00139] В данном варианте реализации первый чистящий элемент 31 и второй чистящий элемент 32 расположены рядом в ряд, отверстие 35 для выпуска жидкости на устройстве 36 для выпуска жидкости расположено под вторым чистящим элементом 32 и обращено к первому чистящему элементу 31; отверстие 35 для выпуска жидкости распыляет чистящую жидкость из блока подачи жидкости 70 на первый чистящий элемент 31, и благодаря тому, что при самовращении первый чистящий элемент 31 соприкасается с чистящей головкой 410 системы влажной уборки 400 на роботе-уборщике 10, чистящая жидкость наносится на чистящую головку 410. В других вариантах реализации настоящего изобретения жидкость, выпускаемая из отверстия 35 для выпуска жидкости на устройстве 36 для выпуска жидкости, может быть направлена к чистящей головке 410, непосредственно распыляя чистящую жидкость на чистящую головку 410 под напором, вместе с первым чистящим элементом 31 и вторым чистящим элементом 32 очищая чистящую головку 410.
[00140] Кроме того, в других вариантах реализации настоящего изобретения устройство 36 для выпуска жидкости также может быть установлено отдельно от узла очистки 30, т.е. первого чистящего элемента 31 и второго чистящего элемента 32. Такое расположение не повлияет на работу других компонентов, даже если некоторые из них не будут работать. Например, базовая станция может использовать только устройство 36 для выпуска жидкости для очистки чистящей головки 410, то есть очищать чистящую головку 410 полностью с использованием чистящей жидкости под напором.
[00141] В данном варианте реализации на устройстве 36 для выпуска жидкости может быть множество отверстий 35 для выпуска жидкости, работающих одновременно, или чистящая жидкость может выпускаться по очереди в соответствии с заранее заданными правилами, то есть множество отверстий 35 для выпуска жидкости не выпускают чистящую жидкость одновременно. Например, для управления временем и частотой выпуска жидкости из разных отверстий 35 для выпуска жидкости можно использовать различные насосы или клапаны. В этом случае можно адаптировать использование базовой станции к разным формам и размерам чистящих головок 410; например, если чистящая головка 410 имеет небольшую площадь очистки, работать может лишь часть отверстий 35 для выпуска жидкости, что позволяет предотвратить ненужный расход чистящей жидкости.
[00142] Вышеуказанное в основном относится к очистке чистящей головки 410 системы влажной уборки 400 на роботе-уборщике 10; в других вариантах реализации настоящего изобретения базовая станция также может очищать другие компоненты робота-уборщика 10, здесь в изобретении нет ограничений.
[00143] В данным варианте реализации, как показано на фиг. 11 и фиг. 12, базовая станция также содержит кран для долива воды 50, который установлен на корпусе 20 базовой станции и используется для соединения с отверстием 16 для долива воды в резервуаре 13 для жидкости на роботе-уборщике 10, чтобы обеспечить подачу воды в резервуар 13 для жидкости на роботе-уборщике 10.
[00144] В данном варианте реализации робот-уборщик 10 может перемещаться к корпусу 20 базовой станции, как показано на фиг. 1, для последующего долива воды.
[00145] Когда в данном варианте реализации робот-уборщик 10 перемещается к корпусу 20 базовой станции, кран для долива воды 50 на базовой станции может соединяться с отверстием 16 для долива воды на роботе-уборщике 10, чтобы базовая станция могла долить жидкость в резервуар 13 для жидкости через кран для долива воды 50.
[00146] В данном варианте реализации робот-уборщик 10 во время стыковки с базовой станцией слегка поворачивается влево и вправо, чтобы кран 50 для долива воды мог точно войти в отверстие 16 для долива воды в резервуаре 13 для жидкости в роботе-уборщике 10; как минимум часть крана 50 для долива воды на базовой станции может быть подвижной, например, выполнено из гибкого материала или находиться на гибком материале.
[00147] В данном варианте реализации, как показано на фиг. 17 и фиг. 18, кран 50 для долива воды содержит основную часть 51, которая соединена с корпусом 20 базовой станции; уплотнительную часть 52, один конец которой соединен с основной частью 51; соединительную часть 53, которая соединяется другим концом уплотнительной части 52, удаленным от основной части 51, соединительная часть 53 используется для соединения с резервуаром 13 для жидкости; уплотнительная часть 52 изготовлена из гибкого материала.
[00148] В частности, основная часть 51 является основным каналом для жидкости, соединительная часть 53 представляет собой участок жесткого сопряжения, который используется для соединения с отверстием 16 для долива воды в резервуар 13 для жидкости на роботе-уборщике 10, а уплотнительная часть 52 представляет собой мягкую конструкцию, благодаря которой кран 50 для долива воды может двигаться в радиальном и осевом направлении, способствуя точному совмещению с отверстием 16 для долива воды в резервуаре 13 для жидкости.
[00149] В данном варианте реализации, как показано на фиг. 17, отверстие 16 для долива воды адаптировано под кран 50 для долива воды, т.е. один конец крана 50 для долива воды может вставляться в отверстие 16 для долива воды, кроме того, соединительная часть 53 крана 50 для долива воды вставляется в отверстие 16 для долива воды. Как упоминалось ранее, в отверстии 16 для долива воды в роботе-уборщике 10 предусмотрен клапан, например, трехходовой клапан, и когда кран 50 для долива воды на базовой станции направлен в отверстие 16 для долива воды на роботе-уборщике 10, базовая станция начинает наливать воду в резервуар для жидкости через отверстие 16 для долива воды, трехходовой клапан под давлением воды из крана 50 для долива воды открывается, соединяя отверстие 16 для долива воды и резервуар 13 для жидкости, в результате чего чистящая жидкость поступает в резервуар 13 для жидкости; когда вода полностью залита, давление воды в направлении крана 50 для долива воды в месте отверстия 16 для долива воды исчезает, трехходовой клапан закрывается, отверстие 16 для долива воды и резервуар 13 для жидкости 13 разъединяются, прекращая попадание чистящей жидкости в резервуар 13 для жидкости.
[00150] В данном варианте реализации к ведущему колесу робота-уборщика 10 также можно приложить движущую силу вперед, когда робот-уборщик 10 пристыкован к базовой станции для долива воды в резервуар 13 для жидкости. Поскольку в процессе пополнения резервуара 13 для жидкости кран 50 для долива воды на базовой станции создает обратную тягу на роботе-уборщике 10, робот-уборщик 10 стремится к откату назад. Увеличение движущей силы вперед на ведущем колесе может компенсировать как минимум часть тяги, чтобы робот-уборщик 10 при пополнении резервуара 13 для жидкости сохранял устойчивость. В других вариантах реализации настоящего изобретения увеличение или уменьшение движущей силы вперед, а также величина движущей силы определяются в зависимости от скорости выхода воды из крана 50 для долива воды, качества самого робота-уборщика 10, трения между ведущим колесом и поверхность стыковки робота-уборщика 10 с базовой станцией и от других факторов, это в данном изобретении не ограничивается.
[00151] Для того чтобы резервуар 13 для жидкости на роботе-уборщике 10 своевременно наполнялся чистящей жидкостью, на роботе-уборщике 10 можно установить датчик для обнаружения изменений уровня жидкости в резервуаре 13 для жидкости. Например, в резервуаре 13 для жидкости может быть предусмотрен поплавок, содержащий магнитный элемент, в резервуаре 13 для жидкости или на корпусе робота-уборщика 10 может быть один или несколько индукционных магнитных датчиков для обнаружения изменений уровня жидкости в резервуаре 13 для жидкости. Как только уровень жидкости в резервуаре 13 для жидкости падает ниже заданного порогового значения, робот-уборщик 10 может автоматически возвращаться на базовую станцию для пополнения запасов воды, или робот-уборщик 10 может отправлять напоминание пользователю через приложение, голосовое сообщение и другими способами, чтобы пользователь мог вернуть робота-уборщика 10 на базовую станцию для пополнения запасов воды. В других вариантах реализации настоящего изобретения для обнаружения изменений уровня жидкости в резервуаре 13 для жидкости также могут использоваться другие средства, такие как инфракрасные датчики. В других вариантах реализации настоящего изобретения для возврата робота-уборщика 10 на базовую станцию для пополнения запасов воды можно использовать другие способы управления, например, после того как робот-уборщик 10 завершит уборку указанной площади или указанной области, он может автоматически возвращаться на базовую станцию для пополнения запасов воды. В данном изобретении это не ограничивается. Кроме того, как описано выше, резервуар 13 для жидкости также может пополняться во время очистки чистящей головки 410 системы влажной уборки 400 на роботе-уборщике 10.
[00152] В данном варианте реализации, как показано на фиг. 17 и фиг. 18, базовая станция также содержит первый блок позиционирования 60, который находится на корпусе 20 базовой станции. Первый блок позиционирования 60 используется для соединения со вторым блоком позиционирования 14 на резервуаре 13 для жидкости.
[00153] В частности, когда робот-уборщик 10 перемещается к корпусу 20 базовой станции, и первый блок позиционирования 60 соединяется со вторым блоком позиционирования 14, кран 50 для долива воды соединяется с резервуаром 13 для жидкости и может пополнять запасы воды в резервуаре 13 для жидкости.
[00154] В данном варианте реализации, как показано на фиг. 18, первая позиционирующая часть 60 имеет полую камеру 61, в которую вставляется конец крана 50 для долива воды, используемый для соединения с резервуаром 13 для жидкости. Когда первый позиционирующий блок 60 соединяется со вторым позиционирующим блоком 14, кран 50 для долива воды, находящийся в полой камере 61, может надежно соединяться с отверстием 16 для долива воды в резервуаре 13 для жидкости.
[00155] В данном варианте реализации, как показано на фиг. 17, вторая позиционирующая часть 14 представляет собой канавку, которая соответствует первой позиционирующей части 60. То есть первая позиционирующая часть 60 вставляется в канавку, прочно соединяя кран 50 для долива воды и отверстие 16 для долива воды. Внешняя поверхность первой позиционирующей части 60 может быть иметь скос, чтобы легче входить в канавку, и даже если робот-уборщик 10 и корпус 20 базовой станции не полностью совмещены, первая позиционирующая часть 60 все равно сможет войти во вторую позиционирующую часть 14.
[00156] В данном варианте реализации блок подачи жидкости 70 может сообщаться с краном 50 для долива воды и с его помощью подавать жидкость в резервуар 13 для жидкости. Блок подачи жидкости 70 используется под чистящую жидкость, которая из блока подачи жидкости 70 может подаваться в резервуар 13 для жидкости через кран 50 для долива воды.
[00157] Как вариант, блок подачи жидкости 70 может выборочно подсоединяться к крану 50 для долива воды или к отверстию 35 для выпуска жидкости, то есть блок подачи жидкости 70 может подавать жидкость в резервуар 13 для жидкости через кран 50 для долива воды, или блок подачи жидкости 70 может подавать чистящую жидкость в очистной бак 21 через отверстие 35 для выпуска жидкости в устройстве 36 для выпуска жидкости. Первый насос используется для подачи чистящей жидкости в очистной бак 21 или для подачи жидкости в кран 50 для долива воды, чтобы пополнить запасы воды в резервуаре 13 для жидкости.
[00158] Следует отметить, что жидкость, выпускаемая из блока подачи жидкости 70, может разделяться на два канала, один канал сообщается с краном 50 для долива воды, а другой канал сообщается с отверстием 35 для выпуска жидкости. Блок подачи жидкости 70 может выборочно сообщаться с двумя каналами, чтобы управлять подачей жидкости к крану 50 для долива воды или к отверстию 35 для выпуска жидкости. При этом на двух каналах могут быть предусмотрены клапаны, которые могут открываться и закрываться, соединяя и разъединяя два канала. Или может быть предусмотрен один трехходовой клапан, например, электромагнитный, то есть для управления соединения блока подачи жидкости 70 с соответствующим каналом может использоваться электромагнитный клапан.
[00159] Как показано на фиг. 11 и фиг. 12, базовая станция также включает в себя второй зарядный контакт 40, который используется для электрического соединения с первым зарядным контактом 12 робота-уборщика 10, чтобы базовая станция заряжала робота-уборщика 10. Как показано на фиг. 2, когда робот-уборщик 10 пристыкован к базовой станции, второй зарядный контакт 40 электрически соединяется с первым зарядным контактом 12.
[00160] В некоторых вариантах реализации, как показано на фиг. 12, корпус 20 базовой станции также включает направляющую боковую поверхность 23, на которой устанавливается второй зарядный контакт 40, а первый зарядный контакт 12 устанавливается на боковой поверхности робота-уборщика 10, чтобы второй зарядный контакт 40 мог электрически соединяться с первым зарядным контактом 12.
[00161] В некоторых вариантах реализации, как показано на фиг. 12, направляющая боковая поверхность 23 включает в себя две противоположные боковые поверхности 231 и среднюю поверхность 232, расположенную между двумя боковыми поверхностями 231, средняя поверхность 232 противоположна направлению движения базовой станции на роботе-уборщике 10 вперед; при этом на средней поверхности 232 находится второй зарядный контакт 40, т.е. первый зарядный контакт 12 установлен на торцевой боковой поверхности робота-уборщика 10.
[00162] В данном варианте реализации вторые зарядные контакты 40 и первые зарядные контакты 12 размещаются попарно. Как вариант, второй зарядный контакт 40 также может располагаться на боковой поверхности 231, т.е. парные вторые зарядные контакты 40 могут находиться на двух боковых поверхностях 231.
[00163] Соответственно, в данном варианте реализации первый зарядный контакт 12, расположенный на роботе-уборщике 10, может находиться на передней боковой стороне робота-уборщика 10. Как показано на фиг. 21, передняя часть робота-уборщика 10 снабжена буфером 122, который подвижно расположен на корпусе робота-уборщика 10, когда робот-уборщик 10 во время движения сталкивается с препятствием перед ним, буфер 122 ударяется о препятствие и перемещается в направлении корпуса робота-уборщика 10, и после того, как робот-уборщик 10 отходит от препятствия, буфер 122 перемещается в направлении от корпуса робота-уборщика 10. Поэтому во время работы робота-уборщика 10 буфер 122 постоянно сжимается или расширяется. В данном варианте реализации первый зарядный контакт 12 робота-уборщика 10 расположен на корпусе робота-уборщика 10 позади буфера 122, а в соответствующей части буфера 122 выполнено сквозное отверстие 1221, чтобы в процессе зарядки робота-уборщика 10 первый зарядный контакт 12 мог соединяться со вторым зарядным контактом 40. Поскольку первый зарядный контакт 12 находится за буфером 122, он не оголен снаружи корпуса и не подвержен повреждениям из-за трения, когда робот-уборщик 10 сталкивается с твердым препятствием.
[00164] В данном варианте реализации первый зарядный контакт 12 и система влажной уборки 400 робота-уборщика 10 находятся на противоположных сторонах робота-уборщика 10, т.е. спереди и сзади, если смотреть в направлении движения робота-уборщика 10. В частности, первый зарядный контакт 12 находится на передней стороне робота-уборщика 10, а система влажной уборки 400 на задней стороне робота-уборщика 10. Поэтому в данном варианте реализации робот-уборщик 10 может стыковаться с базовой станцией в двух положениях; когда робот-уборщик 10 возвращается на базовую станцию для зарядки, он стыкуется с ней в направлении движения вперед, а когда робот-уборщик 10 очищает систему влажной уборки 400 или пополняет резервуар 13 для жидкости, он стыкуется с базовой станцией в направлении движения назад. Для поддержки этих двух способов движения на роботе-уборщике 10 в направлении движения вперед и назад можно установить элементы для связи с базовой станцией, например, это могут быть инфракрасные устройства для приема сигналов базовой станции, в данном изобретении это не ограничивается.
[00165] В данном варианте реализации, как показано на фиг. 19, базовая станция может также включать в себя направляющий мост 27, который размещается над очистным баком 21 и используется для поддержки ведомого колеса 142 робота-уборщика 10. Как показано на фиг. 4, ведомое колесо 142 устанавливается спереди на нижней части робота-уборщика 10. Когда робот-уборщик 10 стыкуется с базовой станцией для зарядки, для обеспечения его устойчивости под ведомым колесом 142 можно предусмотреть опору, а именно направляющий мост 27. Как показано на фиг. 19, направляющий мост 27 в этом варианте реализации проходит через передний и задний концы очистного бака 21 и может направлять ведомое колесо 142 и играть роль опоры после стыковки робота-уборщика 10. В других вариантах реализации настоящего изобретения можно только на переднем конце бачка для воды предусмотреть направленную вперед перемычку, длина которой может определяться такими факторами, как положение стыковки робота-уборщика 10, место установки ведомого колеса 142 и пр., здесь нет ограничений. В данном варианте реализации, поскольку над очистным таком установлен узел очистки 30, который может совершать возвратно-поступательные движения влево и вправо, чтобы направляющий мост 27 не мешал движению узла очистки 30, направляющий мост 27 может быть подвижно расположена над очистным баком 21. Например, когда робот-уборщик 10 стыкуется с базовой станцией для зарядки, направляющий мост 27 может переместиться в среднюю часть очистного бака 21, чтобы направлять и поддерживать ведомое колесо 142 робота-уборщика 10; когда робот-уборщик 10 стыкуется с базовой станции для очистки чистящей головки 410 системы влажной уборки 400, он может переместиться на одну сторону очистного бака 21, чтобы узел очистки 30 мог перемещаться влево и вправо. В данном варианте реализации, как показано на фиг. 19, направляющий мост 27 и узел очистки 30 могут находиться на одном держателе и приводиться в движение влево и вправо одним приводным блоком. Такое расположение позволяет разместить компоненты более компактно, эффективно используя пространство базовой станции.
[00166] В данном варианте реализации, как показано на фиг. 19, корпус 20 базовой станции также включает в себя нижнюю направляющую поверхность 22, на которой имеется противоскользящий выступ 221, робот-уборщик 10 перемещается вдоль противоскользящего выступа 221 по нижней направляющей поверхности 22, противоскользящий выступ 221 может создавать определенную силу трения с роботом-уборщиком 10, чтобы робот-уборщик 10 надежно перемещался к корпусу 20 базовой станции, способствуя позиционированию робота-уборщика 10 в процессе уборки.
[00167] В данном варианте реализации узел очистки 30 расположен над нижней направляющей поверхностью 22, а между узлом очистки 30 и противоскользящим выступом 221 имеется промежуток, чтобы после того, как робот-уборщик 10 переместится на определенное расстояние по нижней направляющей поверхности 22, узел очистки 30 и уборочная система 150 находились напротив друг друга для последующего процесса очистки.
[00168] Как вариант, очистной бак 21 находится на нижней направляющей поверхности 22, нижняя направляющая поверхность 22 имеет скос и плоскость, на скосе может быть предусмотрен противоскользящий выступ 221, а на плоскости может находиться очистной бак 21.
[00169] Следует отметить, что противоскользящая конструкция, образованная противоскользящим выступом 221, соответствует узлу ходового колеса робота-уборщика 10; если узлов ходового колеса два, то и противоскользящих конструкций тоже должно быть две.
[00170] В данном варианте реализации, как показано на фиг. 19 и фиг. 20, корпус 20 базовой станции имеет удлинительную пластину 222, которая соединяется с торцом корпуса 20 базовой станции, тем самым помогая роботу-уборщику 10 перемещаться к корпусу 20 базовой станции, удлинительная пластина 222 может быть складной, то есть ее можно складывать на нижнюю направляющую поверхность 22. В таких особых случаях, как скользкий пол и т.д., выдвижная пластина 222 раскрывается, помогая роботу-уборщику 10 подниматься вверх.
[00171] В данном варианте реализации корпус 20 базовой станции также включает в себя верхнюю направляющую поверхность 24, на которой имеется направляющая часть, которая используется для контакта с роботом-уборщиком 10; при этом направляющая часть расположена над узлом очистки 30. Направляющая часть может ограничивать движение робота-уборщика 10 так, чтобы он перемещался только в нужные положения.
[00172] В частности, направляющая часть расположена над узлом очистки 30, т.е. узел очистки 30 расположен на нижней направляющей поверхности 22, а направляющая часть расположена на верхней направляющей поверхности 24, и если смотреть сверху вниз, направляющая часть расположена над узлом очистки 30.
[00173] В данном варианте реализации, как показано на фиг. 21 и фиг. 22, направляющая часть может включать в себя направляющую нажимную колодку 25, а на верхней кромке робота-уборщика 10 может находиться колесо 19, как показано на фиг. 9, которое может поворачиваться вдоль оси, перпендикулярной направлению движение робота-уборщика 10. Когда роботу-уборщику 10 необходимо переместиться к корпусу 20 базовой станции, колесо 19 может взаимодействовать с направляющей нажимной колодкой 25, способствуя более плавному перемещению робота-уборщика 10 к корпусу 20 базовой станции.
[00174] В данном варианте реализации, как показано на фиг. 23, направляющая часть может включать в себя направляющее колесо 26, которое помимо того, что помогает роботу-уборщику 10 перемещаться за пределы корпуса 20 базовой станции, еще и ограничивает движение робота-уборщика 10 в вертикальном направлении после его стыковки с корпусом базовой станции 20. Например, когда робот-уборщик 10 пристыкован к корпусу 20 базовой станции для очистки, узел очистки 30 на базовой станции контактирует с чистящей головкой 410 системы влажной уборки 400 на роботе-уборщике 10, и к роботу-уборщику 10 прикладывается движущая сила, направленная вертикально вверх, поэтому установка направляющего колеса 26 может частично или полностью компенсировать эту вертикально направленную силу, предотвращая движение робота-уборщика 10 вверх. Как вариант, направляющих колес 26 может быть по меньшей мере два, и они симметрично расположены на левой и правой сторонах базовой станции.
[00175] Базовая станция в этом варианте реализации может осуществлять очистку робота-уборщика, доливать воду в резервуара для жидкости на роботе-уборщике и заряжать робота-уборщика.
[00176] Рассмотрев описание и применив на практике описанное здесь изобретение, специалисты в данной области техники смогут легко придумать другие варианты реализации настоящего изобретения. Данная заявка охватывает любые вариации, виды использования или адаптации настоящего изобретения; эти вариации, виды использования или адаптации соответствуют общим принципам действия настоящего изобретения и включают хорошо известные в данной области техники или привычные технические средства. Описание и примерные варианты реализации считаются лишь иллюстративными, а подлинная область применения и дух этого изобретения указаны в формуле изобретения выше.
[00177] Следует понимать, что настоящее изобретение не ограничивается точной структурой, описанной выше и показанной на чертежах, и включает в себя различные модификации и видоизменения, не выходящие за рамки его применения. Объем настоящего изобретения ограничен только прилагаемыми формулами изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| БАЗОВАЯ СТАНЦИЯ И СИСТЕМА РОБОТА-УБОРЩИКА | 2021 |
|
RU2833996C2 |
| Способ и устройство для обхода препятствий роботом-уборщиком, носитель информации и электронное оборудование | 2021 |
|
RU2826126C1 |
| Автоматическое уборочное оборудование | 2021 |
|
RU2820188C1 |
| Автоматическое уборочное оборудование | 2024 |
|
RU2841299C2 |
| РОБОТ-ПЫЛЕСОС С ФУНКЦИЕЙ WI-FI | 2023 |
|
RU2831101C1 |
| Робот-уборщик и способ очистки | 2019 |
|
RU2775535C1 |
| Чистящая система для самоходного чистящего устройства и способ очистки для него | 2023 |
|
RU2830604C1 |
| Базовая станция, роботизированная система чистки и способ ее управления | 2020 |
|
RU2785339C1 |
| РОБОТИЗИРОВАННАЯ СИСТЕМА ЧИСТКИ, БАЗОВАЯ СТАНЦИЯ И СПОСОБ ЕЕ УПРАВЛЕНИЯ | 2019 |
|
RU2777408C1 |
| Способ и устройство для управления очисткой уборочных компонентов уборочного оборудования и машиночитаемый носитель информации | 2021 |
|
RU2830248C1 |
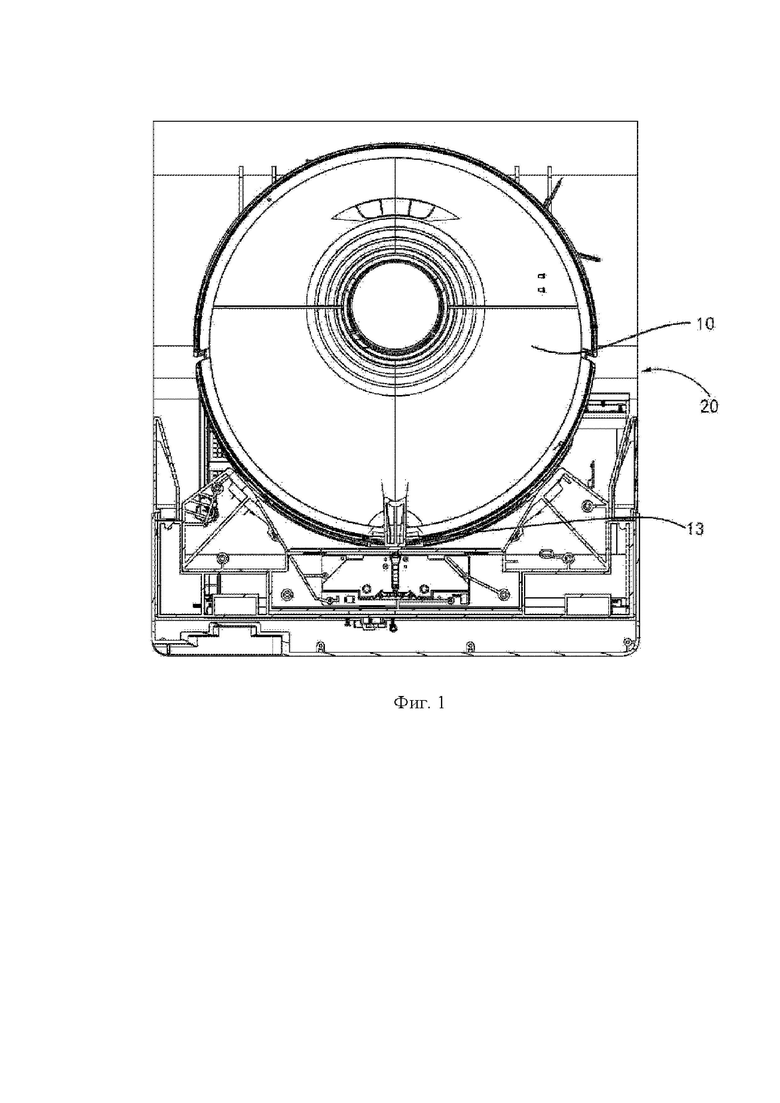
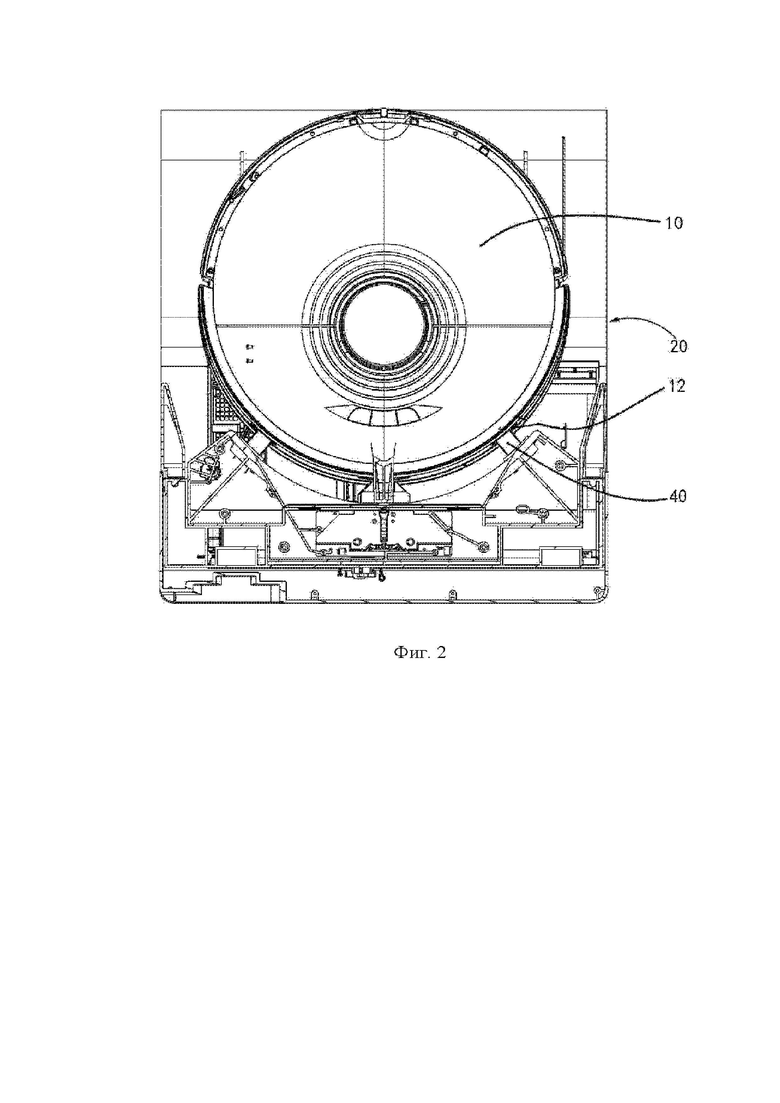
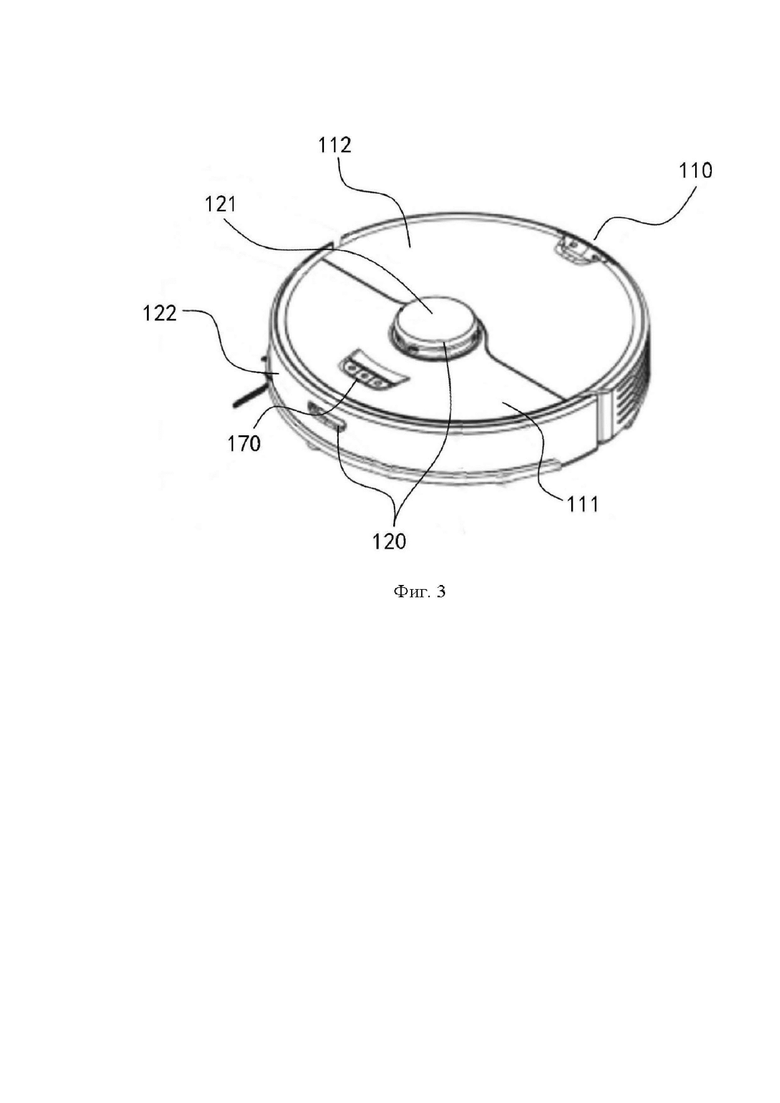
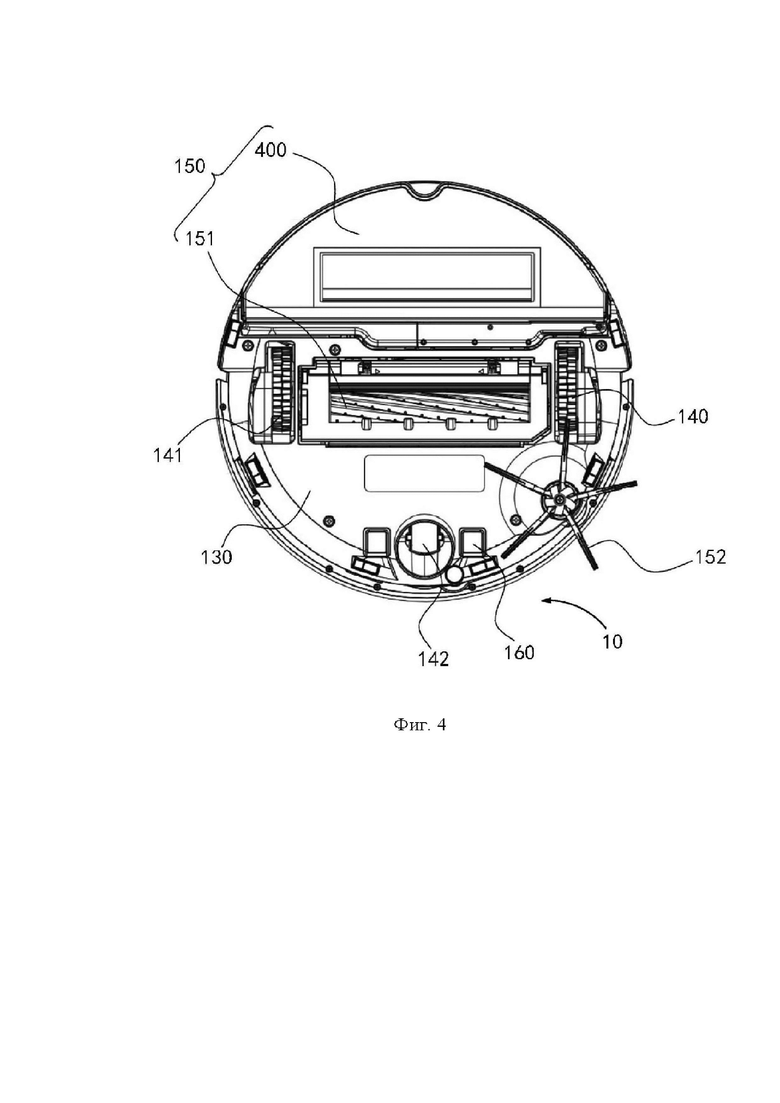
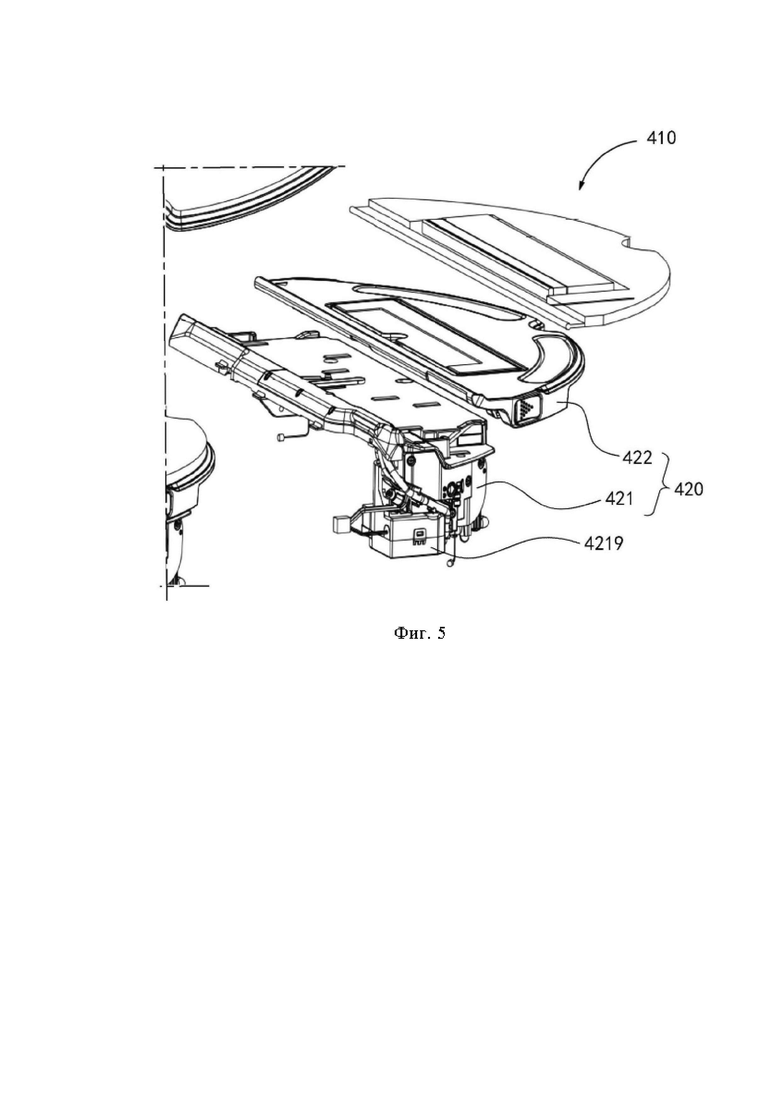
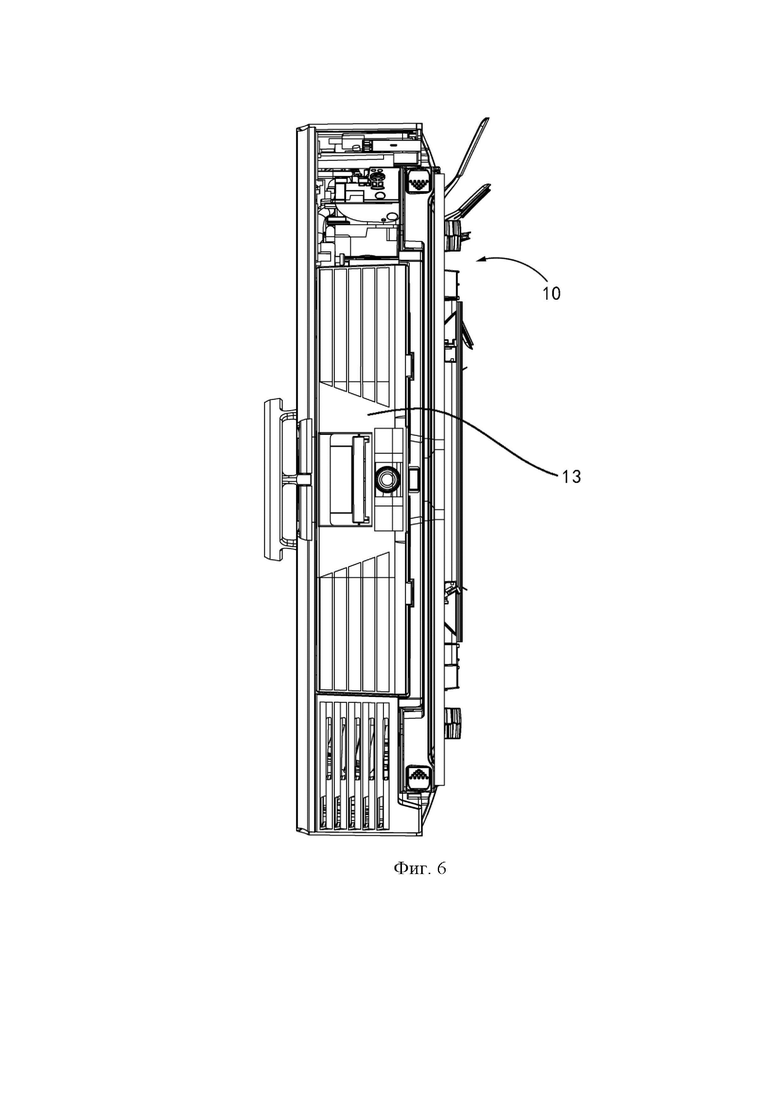
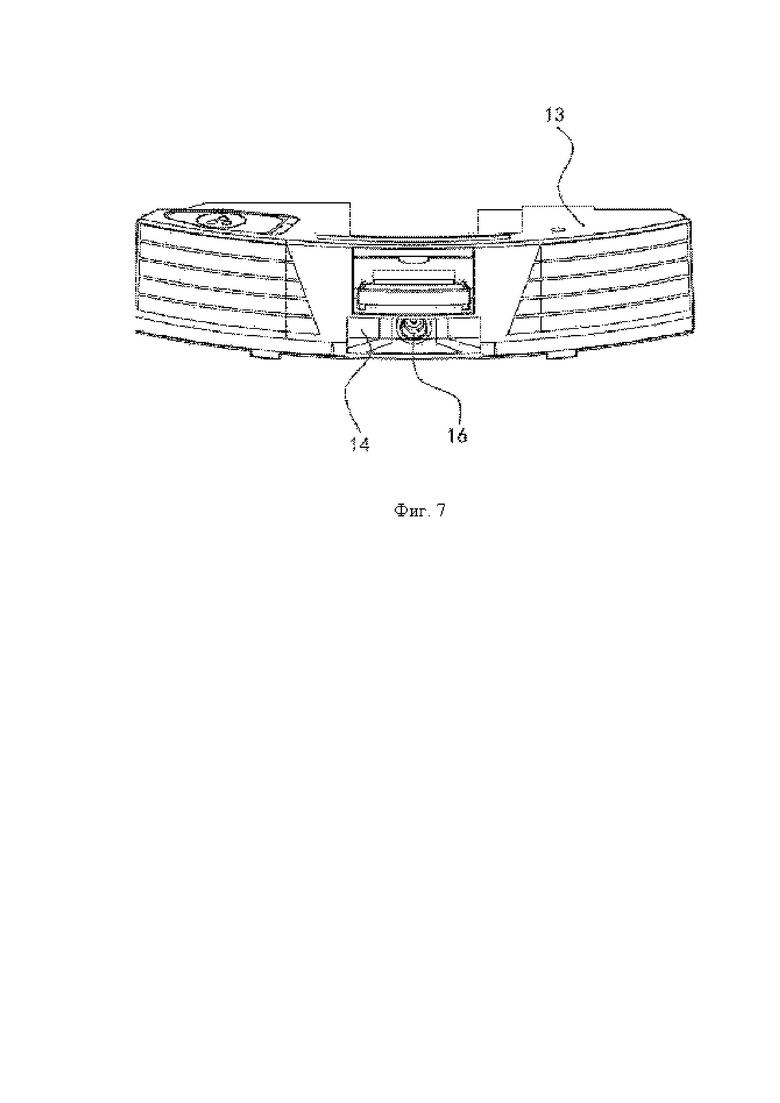
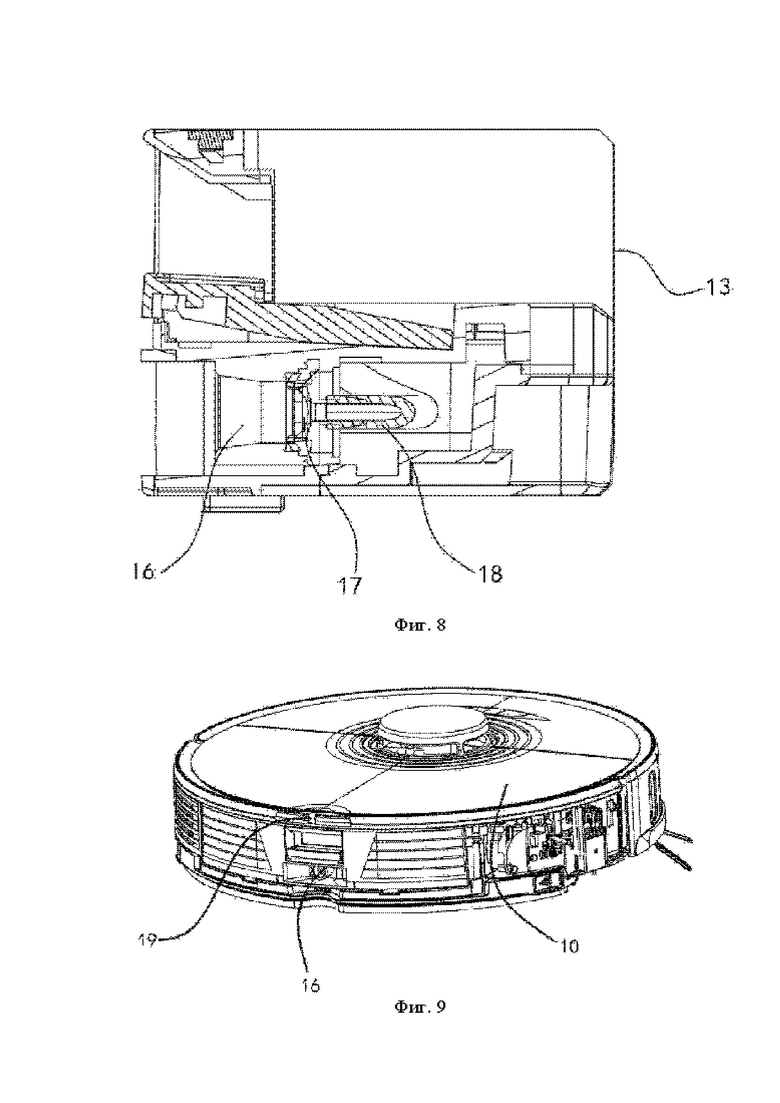
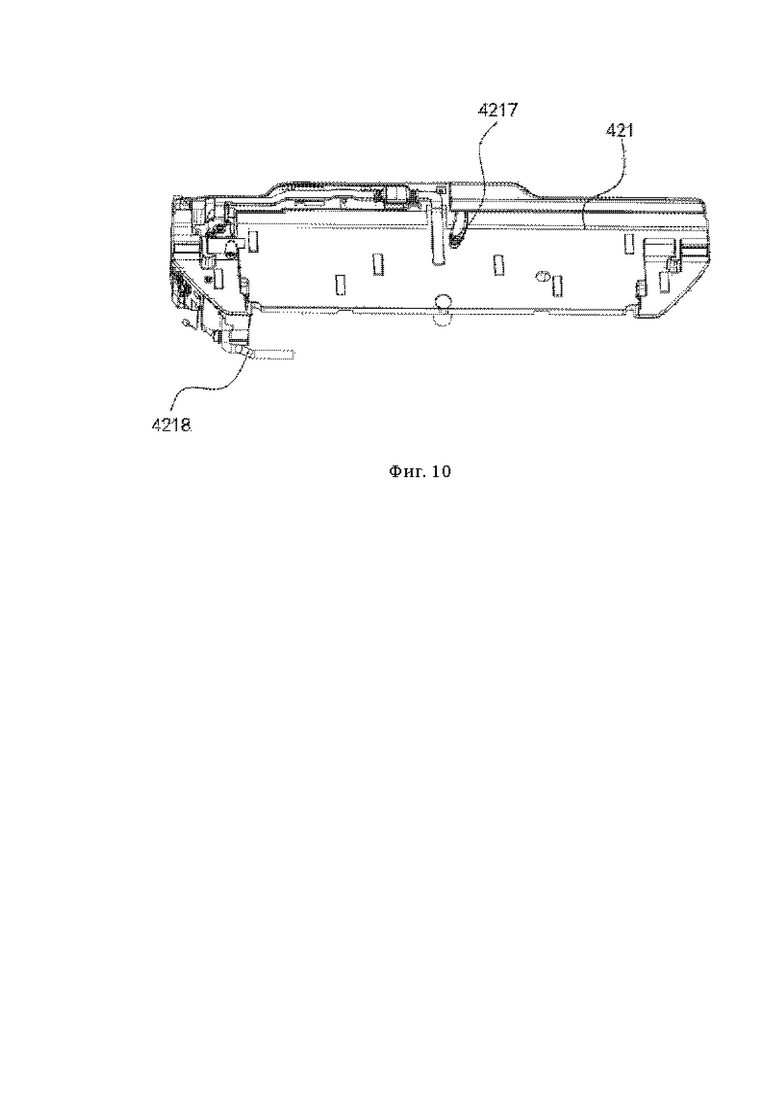
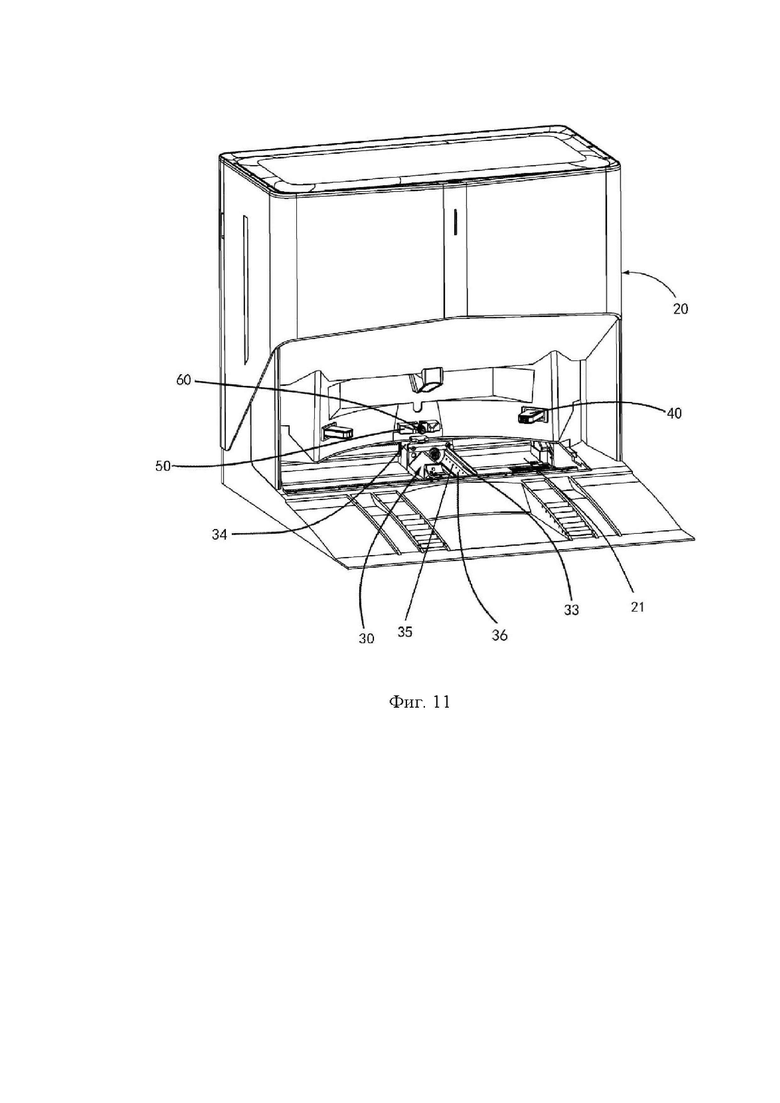
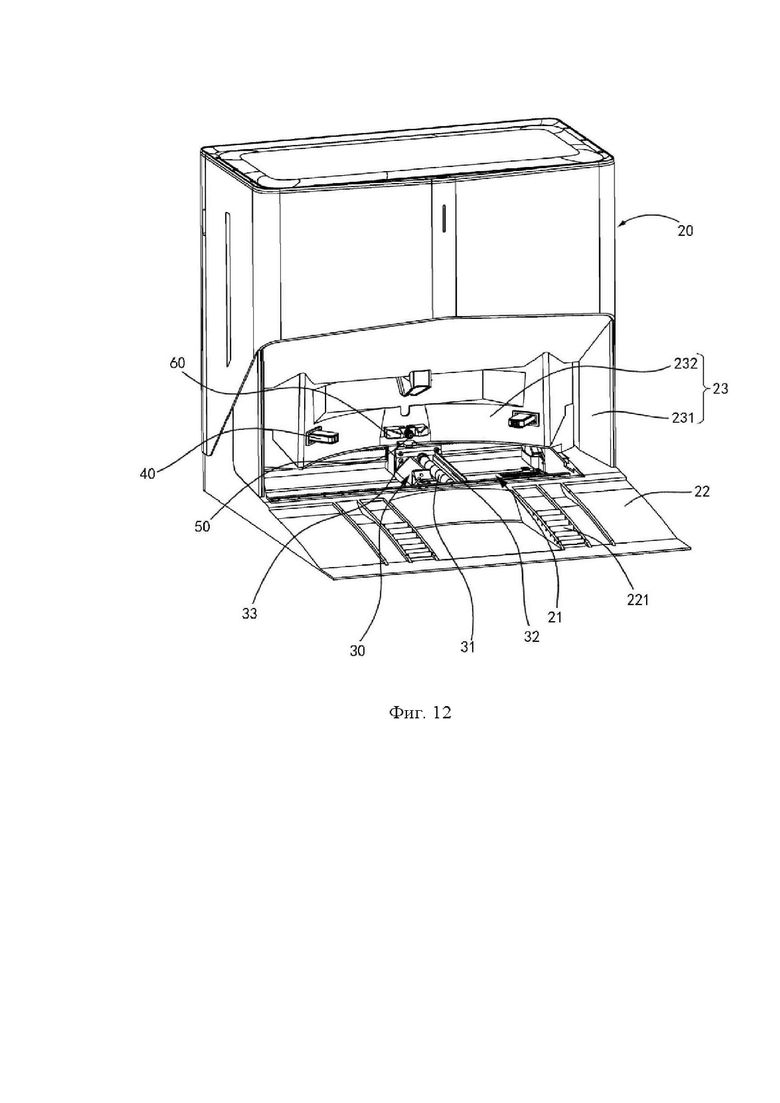
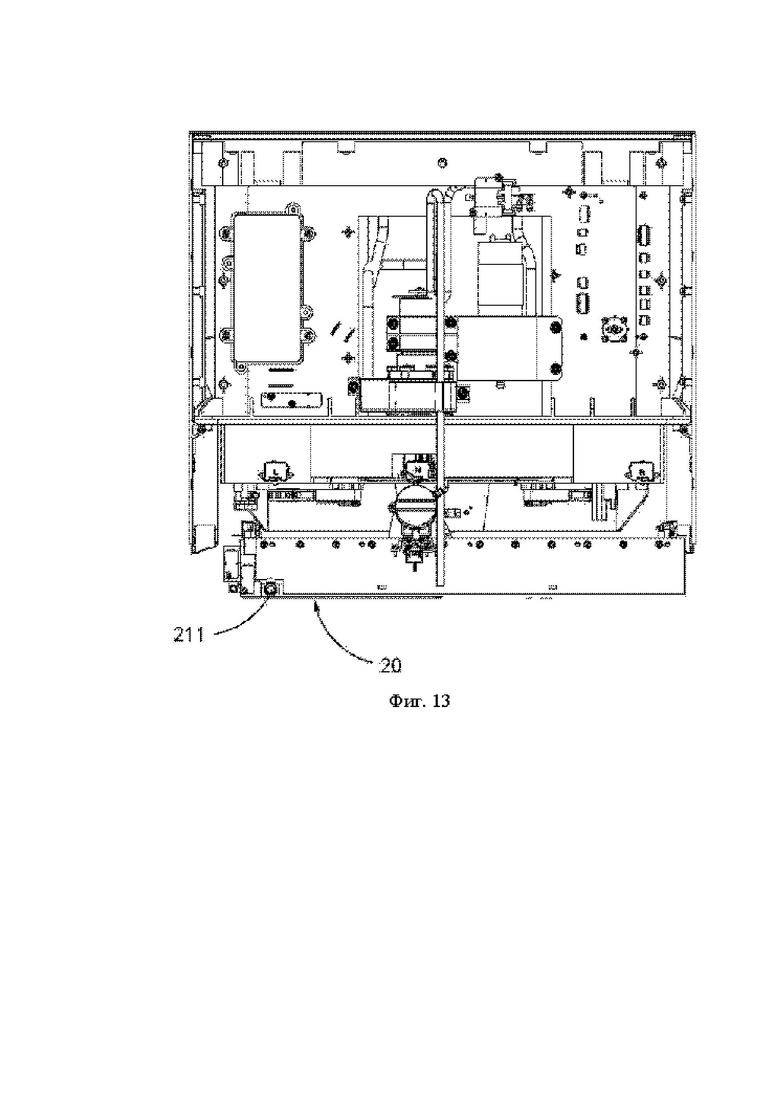
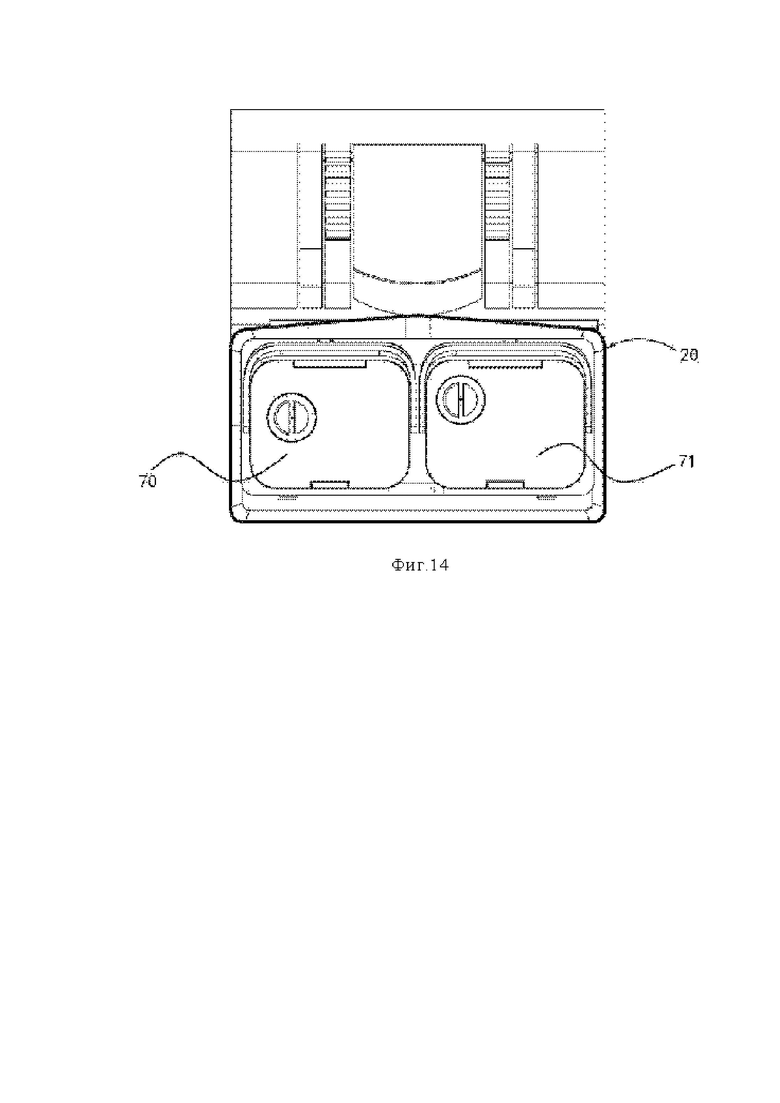
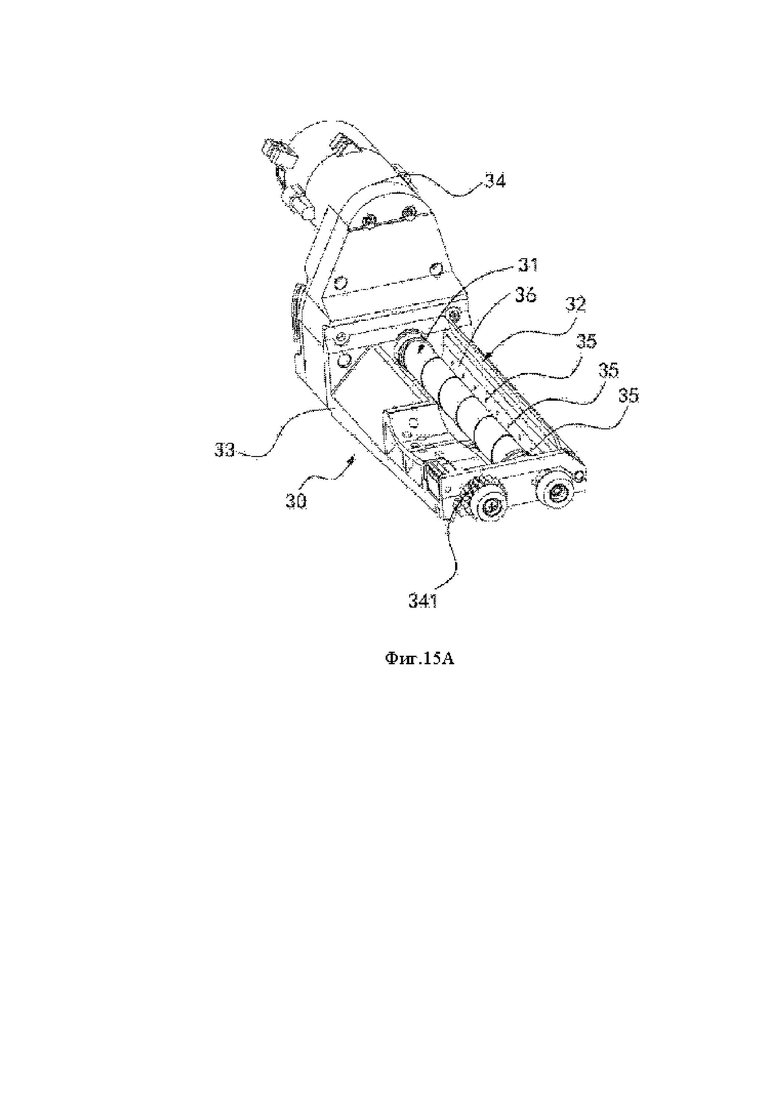
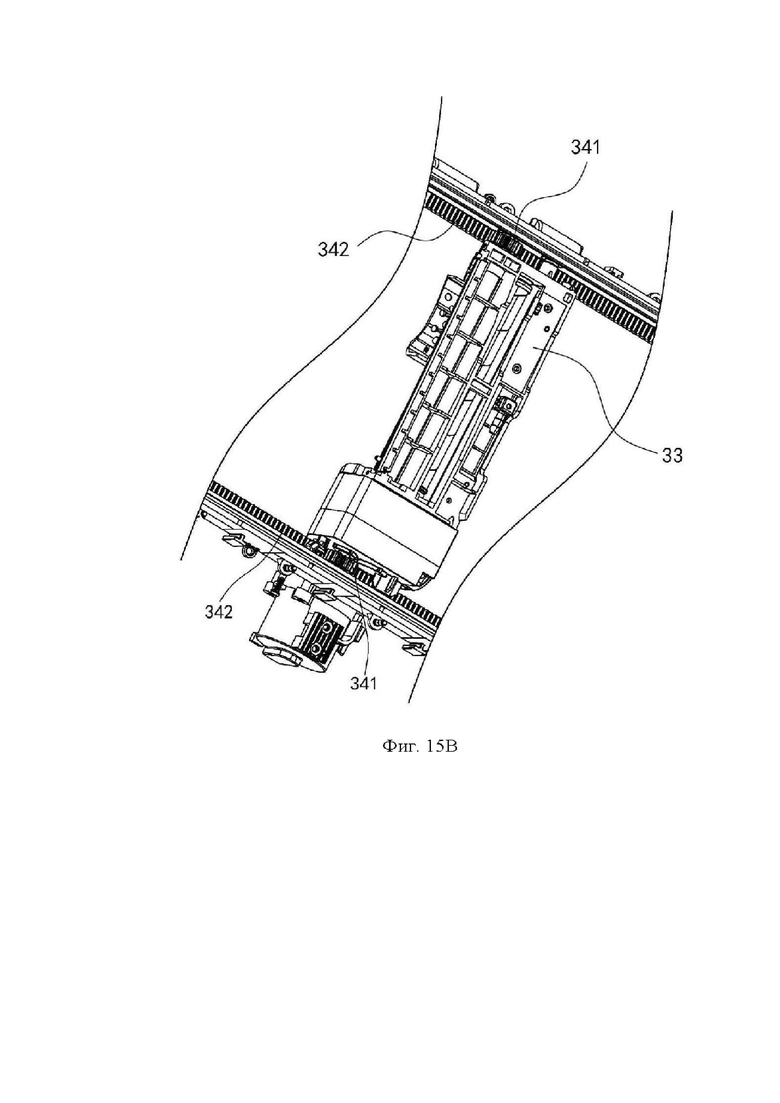
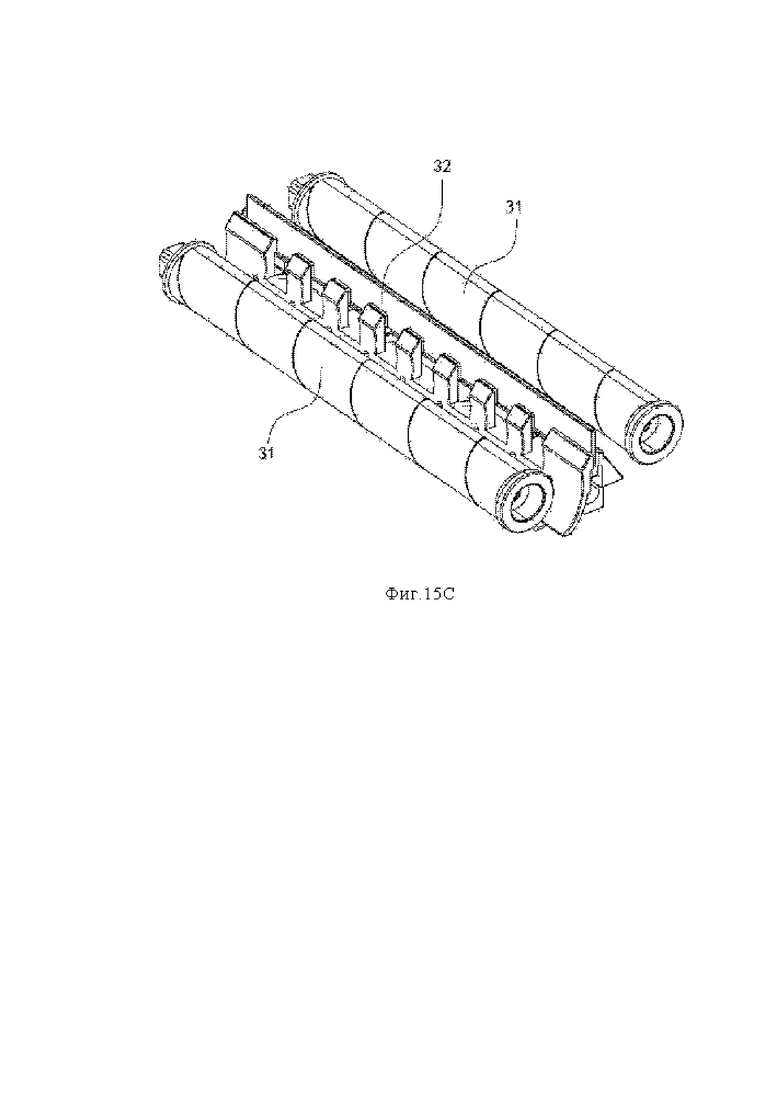
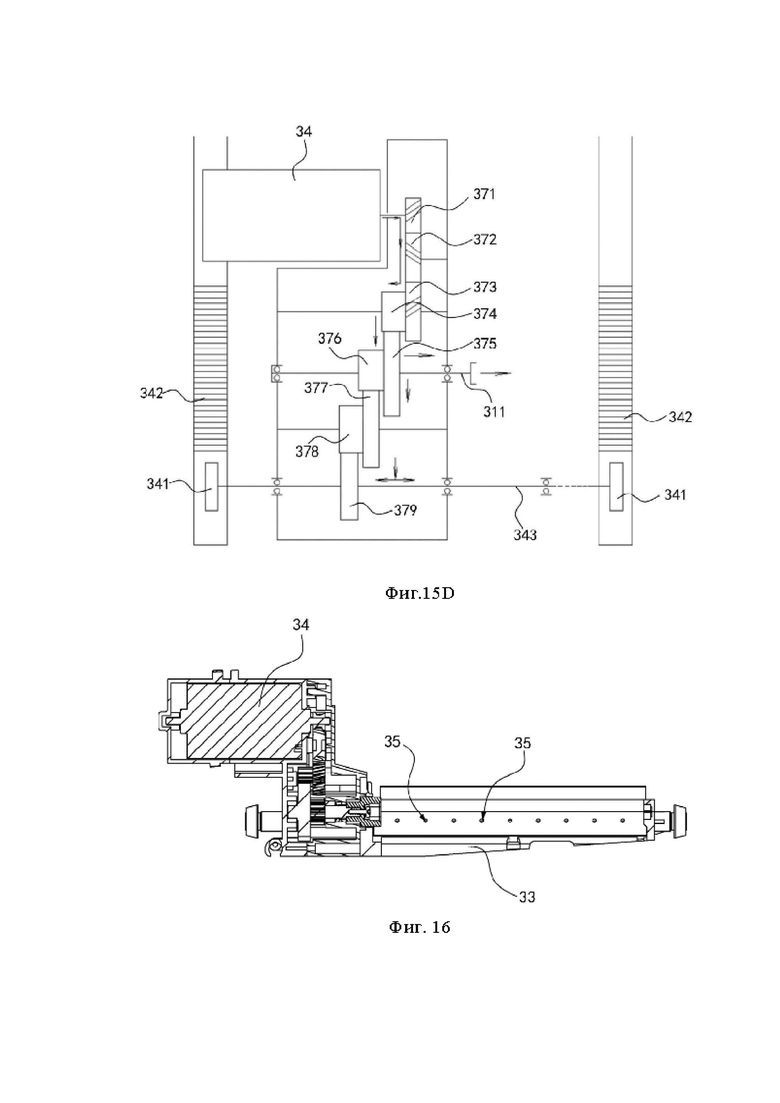
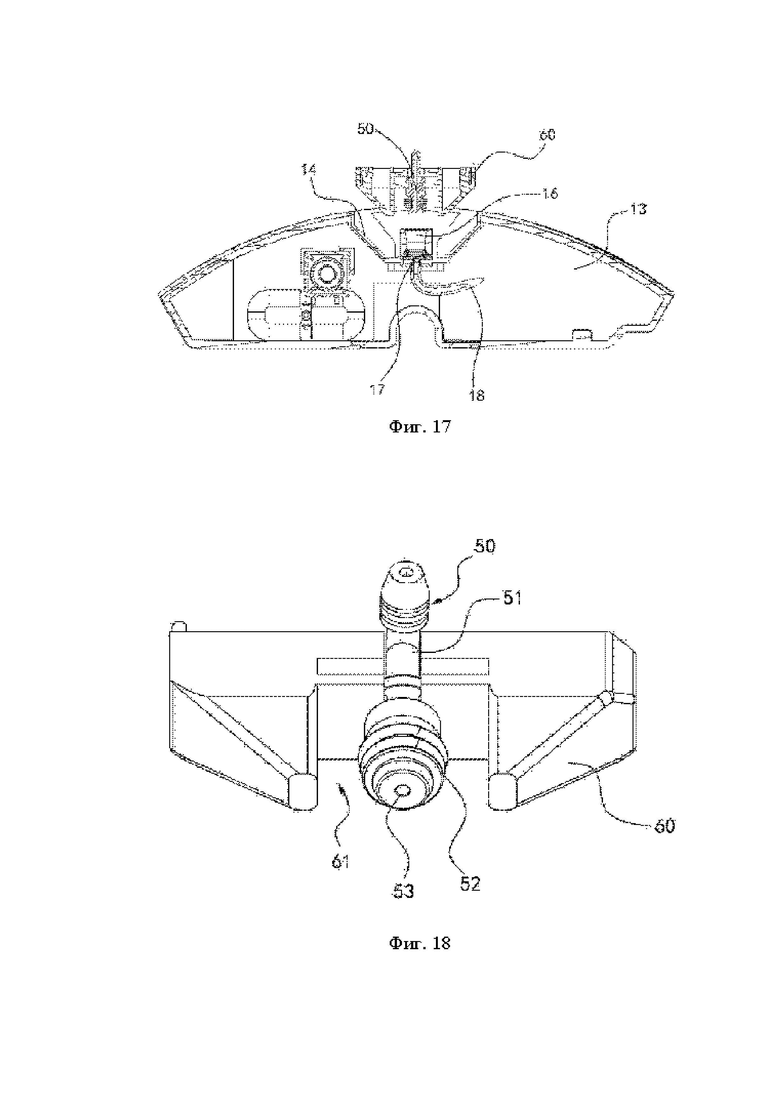
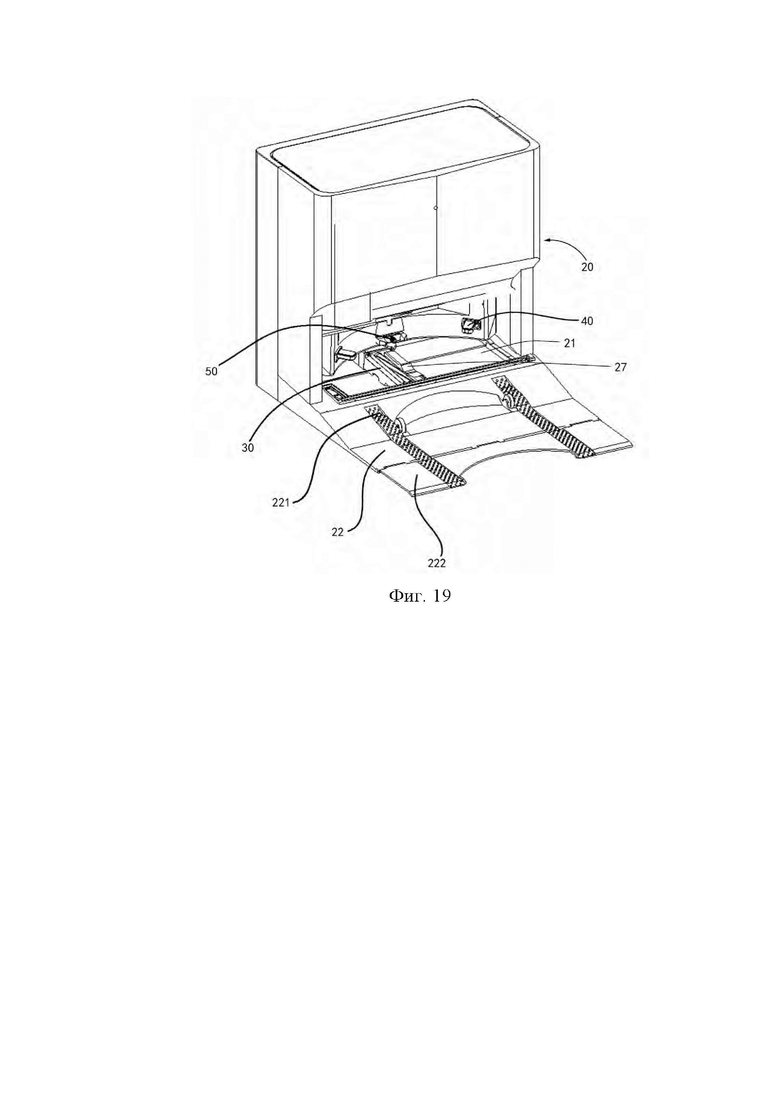
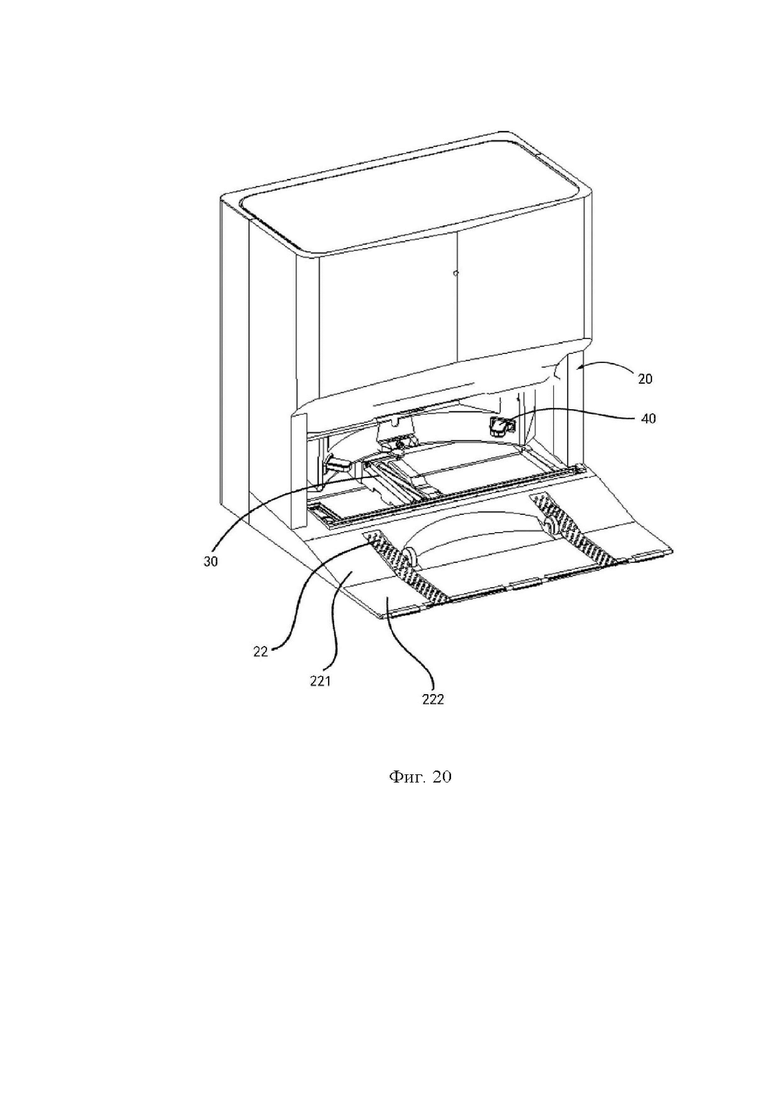
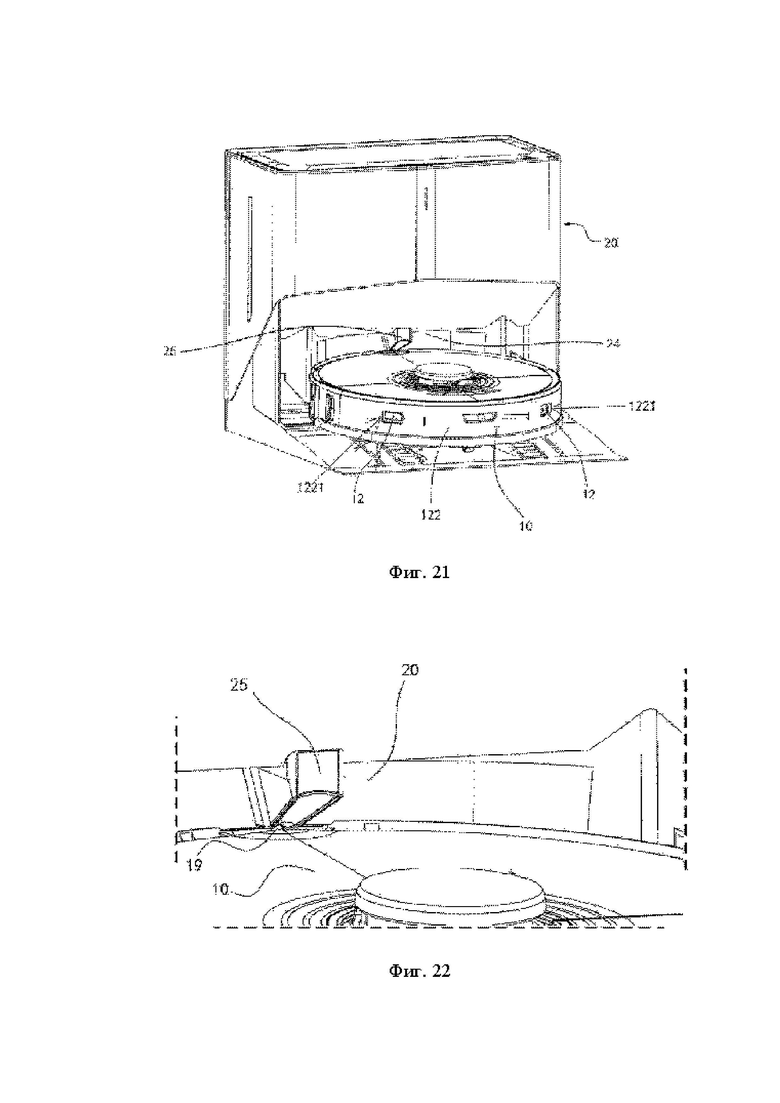
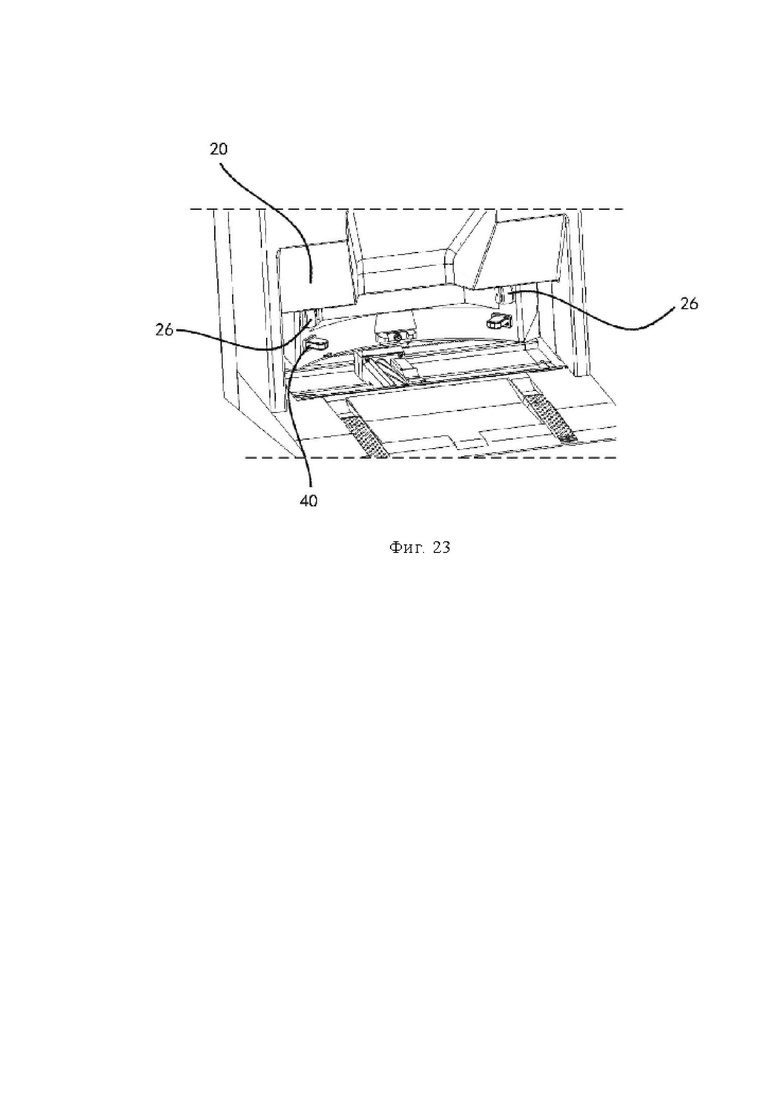
Настоящее изобретение относится к области техники "умного дома" и представляет базовую станцию и систему робота-уборщика. Базовая станция, уборочная система для очистки робота-уборщика, базовая станция включает в себя корпус базовой станции; узел очистки подвижно установлен на корпусе базовой станции и включает в себя первый чистящий элемент и второй чистящий элемент, отличный от первого чистящего элемента; при этом первый чистящий элемент и второй чистящий элемент взаимодействуют с уборочной системой, очищая ее от мусора. После установки узла очистки и уборочного механизма напротив друг друга они начинают перемещаться относительно друг друга, в результате чего первый чистящий элемент и второй чистящий элемент соприкасаются с уборочным механизмом робота-уборщика, тем самым очищая уборочный механизм от мусора. Технический результат заявленной группы изобретений позволяет осуществить автоматическую очистку уборочного механизма. 3 н. и 12 з.п. ф-лы, 23 ил.
1. Базовая станция для технического обслуживания робота-уборщика,
содержащая:
корпус базовой станции, содержащий ванну для мытья, чистящий узел, расположенный в ванне для мытья и предназначенный для очистки чистящей подушки робота-уборщика путем относительного перемещения чистящего узла и чистящей подушки в горизонтальной плоскости, причем чистящая подушка выполнена с возможностью перемещения между первым положением и вторым положением, которое ниже первого положения, контейнер для хранения жидкости, расположенный в корпусе базовой станции над чистящим узлом и выполненный с возможностью подачи жидкости в бачок для жидкости робота-уборщика, контейнер для сбора, расположенный в корпусе базовой станции над чистящим узлом и предназначенный для сбора жидкости из ванны для мытья.
2. Базовая станция по п. 1, в которой чистящий узел очищает чистящую подушку робота-уборщика, когда чистящая подушка находится во втором положении.
3. Базовая станция по п. 1, в которой чистящий узел очищает чистящую подушку робота-уборщика при ее перемещении относительно базовой станции.
4. Базовая станция по п. 1, в которой контейнер для хранения жидкости выполнен с возможностью подачи жидкости для очистки чистящей подушки робота-уборщика.
5. Базовая станция по п. 1, дополнительно содержащая внутренний дугообразный резервуар, в котором робот-уборщик находится по меньшей мере частично во время технического обслуживания.
6. Базовая станция по п. 5, дополнительно содержащая патрубок подачи жидкости, подсоединенный к контейнеру для хранения жидкости и выполненный с возможностью подачи жидкости из контейнера для хранения жидкости в бачок для жидкости робота-уборщика, причем патрубок подачи жидкости подвижно закреплен на боковой стенке внутреннего дугообразного контейнера.
7. Базовая станция по п. 6, дополнительно содержащая по меньшей мере один второй направляющий ролик, расположенный на боковой стенке внутреннего дугообразного контейнера и выполненный с возможностью контакта с первым направляющим роликом, расположенным на роботе-уборщике, для облегчения совмещения отверстия для заливки жидкости, соединенного с бачком для жидкости, с патрубком подачи жидкости.
8. Базовая станция по п. 7, в которой имеется два вторых направляющих ролика, расположенных симметрично соответственно слева и справа от патрубка подачи жидкости.
9. Базовая станция по п. 8, в которой патрубок подачи жидкости обернут гибким уплотнением.
10. Базовая станция по п. 5, в которой во время очистки чистящим узлом чистящей подушки робота-уборщика или заливки жидкости из контейнера для хранения жидкости в бачок для жидкости робота-уборщика задняя часть робота-уборщика располагается во внутреннем дугообразном контейнере.
11. Робот-уборщик, содержащий:
корпус робота, приводную систему, расположенную в корпусе робота и выполненную с возможностью перемещения робота-уборщика по поверхности пола, чистящую подушку, расположенную на корпусе робота и предназначенную для очистки поверхности пола, причем чистящая подушка выполнена с возможностью перемещения между первым положением и вторым положением, которое ниже первого положения, при этом чистящая подушка очищается чистящим узлом базовой станции при относительном перемещении чистящего узла и чистящей подушки в горизонтальной плоскости, бачок для жидкости, расположенный над чистящей подушкой и выполненный с возможностью подачи жидкости к чистящей подушке и заправки из контейнера для хранения жидкости на базовой станции.
12. Робот-уборщик по п. 11, в котором чистящая подушка очищается, когда она находится во втором положении, или чистящая подушка очищается при ее перемещении относительно базовой станции.
13. Робот-уборщик по п. 11, имеющий круглый периметр, причем робот-уборщик во время его технического обслуживания базовой станцией частично размещается во внутреннем дугообразном резервуаре базовой станции.
14. Робот-уборщик по п. 13, в котором во время очистки чистящей подушки базовой станцией или подачи жидкости базовой станцией в бачок для жидкости задняя часть робота-уборщика расположена во внутреннем дугообразном резервуаре базовой станции.
15. Система робота-уборщика, содержащая базовую станцию и робот-уборщик, причем базовая станция содержит:
корпус базовой станции, содержащий ванну для мытья, чистящий узел, расположенный в корпусе базовой станции и выполненный с возможностью очистки чистящей подушки робота-уборщика путем относительного перемещения чистящего узла и чистящей подушки в горизонтальной плоскости, контейнер для хранения жидкости, расположенный в корпусе базовой станции над чистящим узлом и выполненный с возможностью подачи жидкости в бачок для жидкости робота-уборщика, контейнер для сбора, расположенный в корпусе базовой станции над чистящим узлом и предназначенный для сбора жидкости из ванны для мытья, при этом робот-уборщик содержит:
корпус робота, приводную систему, расположенную в корпусе робота и выполненную с возможностью перемещения робота-уборщика по поверхности пола, чистящую подушку, расположенную на корпусе робота и предназначенную для очистки поверхности пола, причем чистящая подушка выполнена с возможностью перемещения между первым положением и вторым положением, которое ниже первого положения, бачок для жидкости, расположенный над чистящей подушкой и выполненный с возможностью подачи жидкости к чистящей подушке и заправки из контейнера для хранения жидкости, модуль управления, имеющий связь с приводной системой, чистящей подушкой и бачком для жидкости и выполненный с возможностью:
управления приводной системой для автоматического перемещения робота-уборщика по поверхности пола, управления чистящей подушкой для ее перемещения между первым положением и вторым положением, и управления бачком для жидкости для автоматической подачи жидкости к чистящей подушке для очистки поверхности пола.
| CN 213551560 U, 29.06.2021 | |||
| US 2014259511 A1,18.09.2014 | |||
| CN112263191 A, 26.01.2021 | |||
| РОБОТ-УБОРЩИК И СПОСОБ УПРАВЛЕНИЯ ТАКОВЫМ | 2013 |
|
RU2540058C2 |

