ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретения относится к роботу-уборщику, а также к роботу-уборщику, способу очистки и автоматизированной системе заряда.
УРОВЕНЬ ТЕХНИКИ
По мере того, как потребности пользователей становятся более разнообразными, существует множество разновидностей роботов-уборщиков. Робот-уборщик может протирать поверхность полов и тем самым повышать чистоту полов.
Известен робот-уборщик, совершающий работу по мытью полов тряпкой, такой как робот-уборщик, раскрытый в документе CN 206880637U. Когда он убирает помещения пользователя, как правила, использует одну и ту же тряпку для уборки разных зон в помещениях, например, кухни, гостиной комнаты, туалетной комнаты, спальни и т.д. В таком случае пятна из разных зон загрязняют друг друга, уменьшая эффект уборки.
Поэтому, пользователь должен самостоятельно ухаживать за роботом, и после того, как робот работает определенное время, снимать тряпку для очистки или замены на новую. Для пользователей такое участие человека снижает опыт автоматизированной работы робота.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Для преодоления недостатков известных технологий задачей настоящего изобретения является предоставление робота-уборщика, способного выполнять операцию уборки по зонам.
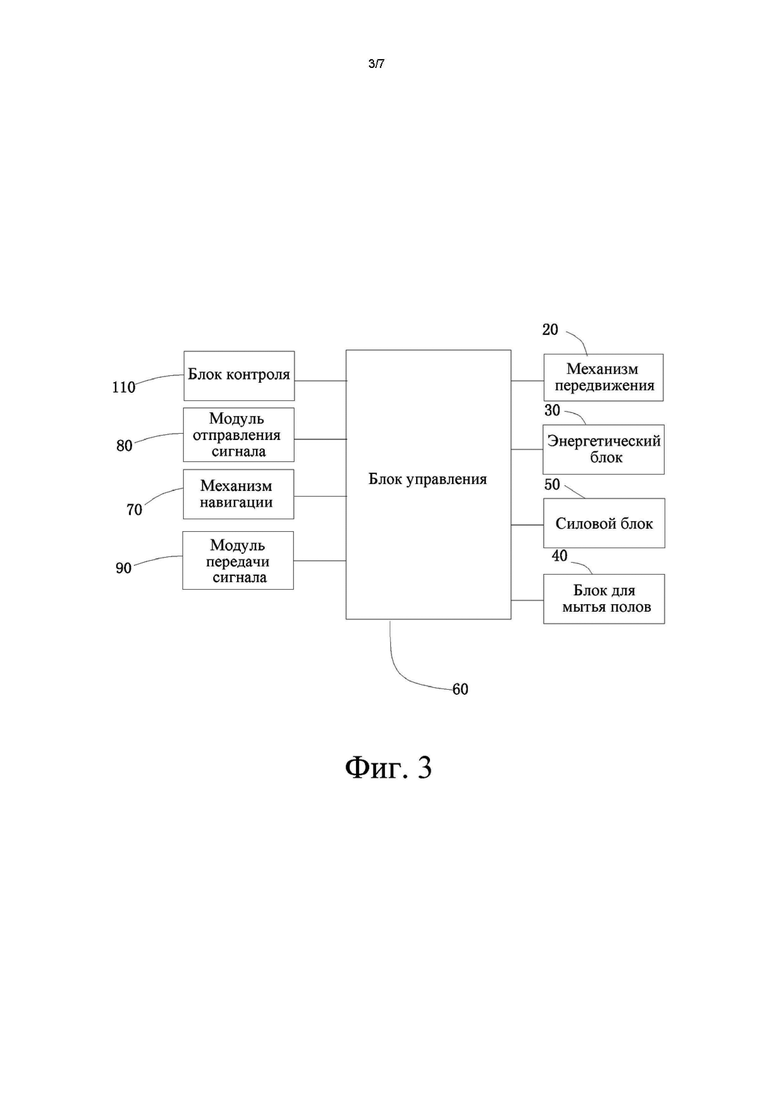
Для решения поставленной задачи настоящее изобретение представляет следующее техническое решение: робот-уборщик, совершающий передвижение и работу в рабочих зонах, может включать в себя: корпус; механизм передвижения, поддерживающий корпус и приводящий в передвижение робот-уборщик по рабочей поверхности; силовой блок, предоставляющий роботу-уборщику движущую силу для обеспечения передвижения и работы; блок для мытья полов, предназначенный для установки на корпусе и выполнения заданной операции уборки рабочей поверхности, блок для мытья полов может быть оснащен обтирочными материалами; блок управления, электрически соединенный и контролирующий силовой блок для осуществления автоматического передвижения и автоматической работы робота-уборщика; робот-уборщик также может включать в себя блок контроля, предназначенный для проверки категории зоны, после завершения операций уборки блоком для мытья полов в текущей зоне, блок контроля проверяет категорию следующей зоны для определения соответствия категории зоны текущей зоне, когда категория зоны признана разной, под контролем блока управления робот-уборщик передает пользователю информацию о необходимости замены обтирочных материалов, или заменяет обтирочные материалы.
Предпочтительно, информация о необходимости замены обтирочных материалов представляет собой дистанционную информацию и/или локальную информацию от робота-уборщика.
Предпочтительно, блок для мытья полов включает в себя: пластину для мытья полов, предназначенную для установки упомянутых обтирочных материалов с возможностью разборки.
Предпочтительно, когда категория зоны признана разной, под контролем блока управления робот-уборщик возвращается на базовую станцию для замены блока для мытья полов.
Предпочтительно, робот-уборщик может также включать в себя: подъемный механизм, предназначенный для изменения высоты упомянутого блока для мытья полов относительно упомянутой рабочей поверхности под контролем блока управления.
Предпочтительно, когда упомянутый робот-уборщик возвращается на базовую станцию для замены упомянутого блока для мытья полов, упомянутый подъемный механизм приводит упомянутый блок для мытья полов в поднятие из первого относительно рабочей поверхности положения до второго положения.
Предпочтительно, на вершине упомянутого корпуса предусмотрено выступное устройство, обращенное вниз, которое совершает движение относительно упомянутого блока для мытья полов и соприкасается с упомянутым блоком для мытья полов, в результате чего упомянутый блок для мытья полов отсоединиться от упомянутого корпуса.
Предпочтительно, упомянутый блок для мытья полов установлен на упомянутом корпусе с возможностью разборки.
Предпочтительно, способ разделения зон по категориям может быть определен пользователем самостоятельно и/или задан предварительно.
Предпочтительно, упомянутый блок контроля включает в себя, но не ограничиваясь этим, по меньшей мере один из нижеследующих: датчик зрения, радарный датчик или оптический датчик, категория зоны определяется в зависимости от результатов проверки упомянутого блока контроля.
Предпочтительно, робот-уборщик может также включать в себя механизм навигации, предназначенный для создания карты рабочих зон робота-уборщика, а блок контроля проверяет категорию следующей зоны, основываясь на карте рабочих зон.
Предпочтительно, когда робот-уборщик возвращается на базовую станцию для замены обтирочных материалов, механизм навигации отмечает текущее положение на карте рабочих зон, чтобы робот-уборщик вернулся в отмеченное положение для продолжения работы после замены обтирочных материалов.
Предпочтительно, блок для мытья полов может также включать в себя датчик тряпки, который, когда категория зоны признана одинаковой, проверяет степень чистоты обтирочного материала, если степень чистоты ниже заданного порога, то под контролем блока управления робот-уборщик заменяет обтирочный материал.
Предпочтительно, датчик тряпки может быть установлен под корпусом.
Предпочтительно, когда степень чистоты обтирочного материала выше или равна заданного порога, то под контролем блока управления робот-уборщик передвигается непосредственно в следующую зону для продолжения работы.
Предпочтительно, робот-уборщик может также включать в себя модуль отправления сигнала, который отправляет на базовую станцию сигнал о замене обтирочных материалов, когда упомянутый робот-уборщик возвращается на упомянутую базовую станцию для замены обтирочных материалов, или отправляет на базовую станцию сигнал о возвращении для зарядки, когда упомянутый робот-уборщик возвращается на упомянутую базовую станцию для зарядки.
Предпочтительно, робот-уборщик может также включать в себя: энергетический блок, предоставляющий роботу-уборщику энергию для обеспечения передвижения и выполнения работы.
Предпочтительно, робот-уборщик является роботом для домашнего и /или внутреннего пользования.
Согласно примерам осуществления настоящего изобретения предоставлен способ очистки с помощью робота-уборщика, робот-уборщик включает в себя: корпус; механизм передвижения, поддерживающий корпус и приводящий в передвижение робот-уборщик; силовой блок, предоставляющий роботу-уборщику движущую силу для обеспечения передвижения и работы; блок для мытья полов, предназначенный для установки на корпусе и выполнения заданной операции уборки, блок для мытья полов может быть оснащен обтирочными материалами; блок управления, электрически соединенный и контролирующий силовой блок для осуществления автоматического передвижения и автоматической работы робота-уборщика; после завершения операций уборки в текущей зоне, можно проверять категорию следующей зоны для определения соответствия категории следующей зоны текущей зоне; когда категория зоны признана разной, можно передавать пользователю информацию о необходимости замены обтирочных материалов, или заменяет обтирочные материалы.
Соответственно, для обеспечения своевременности и непрерывности работы портативного очистителя, согласно примерам осуществления настоящего изобретения предоставлена автоматизированная система заряда, которая может включать в себя робот-уборщик, портативный очиститель и, по меньшей мере, один энергетический блок, который может быть выбран для питания робота-уборщика или портативного очистителя.
Предпочтительно, энергетический блок может накапливать электричество от внешнего источника питания в себе через робот-уборщик.
Предпочтительно, энергетический блок может быть батарейным блоком.
Предпочтительно, робот-уборщик может включать в себя корпус, на котором предусмотрен разъем для батареи для вмещения упомянутого энергетического блока, установленного в упомянутом разъеме для батареи с возможностью разборки.
Предпочтительно, робот-уборщик оснащен первым вставным разъемом, упомянутый портативный очиститель оснащен вторым вставным разъемом, упомянутый энергетический блок оснащен третьим вставным разъемом, когда упомянутый первый вставной разъем соединен с упомянутым третьим вставным разъемом выполняется первая функция и/или вторая функция, упомянутая первая функция подразумевает питание упомянутого робота-уборщика от упомянутого энергетического блока, упомянутая вторая функция подразумевает зарядку упомянутого энергетического блока с помощью упомянутого робота-уборщика, когда упомянутый энергетический блок отсоединен от упомянутого робота-уборщика и упомянутый второй вставной разъем соединен с упомянутым третьим вставным разъемом, осуществляется питание упомянутого портативного очистителя от упомянутого энергетического блока.
Предпочтительно, первый вставной разъем закреплен на упомянутом роботе-уборщике с помощью уплотнительного элемента.
Предпочтительно, робот-уборщик может также включать в себя блок управления, когда уровень заряда упомянутого энергетического блока на упомянутом роботе-уборщике ниже заданного порога, под контролем упомянутого блока управления упомянутый робот-уборщик возвращается на базовую станцию для зарядки.
Предпочтительно, робот-уборщик может также включать в себя модуль отправления сигнала, который, в процессе зарядки робота-уборщика, отправляет клиентскому терминалу следующую информацию: уровень заряда энергетического блока и/или время работы робота-уборщика по имеющемуся уровню заряда.
Предпочтительно, робот-уборщик может также включать в себя крышку, независимую от корпуса, которая предусмотрена на корпусе и покрывает энергетический блок.
Предпочтительно, крышка соединена с корпусом с возможностью открытия, крышка и корпус соединены с помощью застежек.
Предпочтительно, крышка закреплена на корпусе, крышка и корпус образуют полость для вмещения энергетического блока.
По сравнению с предшествующим уровнем техники настоящее изобретение имеет технические результаты: можно предотвратить такие недостатки, как загрязнение зон друг друга из-за использования одинаковых обтирочных материалов в разных зонах, тем самым, обеспечивая отсутствие возможности взаимных загрязнений грязью из разных категорий зон и повышая степень чистоты уборки роботом-уборщиком.
ОПИСАНИЕ ЧЕРТЕЖЕЙ
Вышеописанная задача, техническое решение и технические результаты настоящего изобретения могут осуществляться с помощью следующих чертежей:
Фиг. 1 - схема системы робота-уборщика по одному примеру осуществления настоящего изобретения;
Фиг. 2 - главный вид робота-уборщика с энергетическим блоком по одному примеру осуществления настоящего изобретения;
Фиг. 3 - схема функциональных блоков робота-уборщика по одному примеру осуществления настоящего изобретения;
Фиг. 4 - вид блока для мытья полов сбоку по одному примеру осуществления настоящего изобретения;
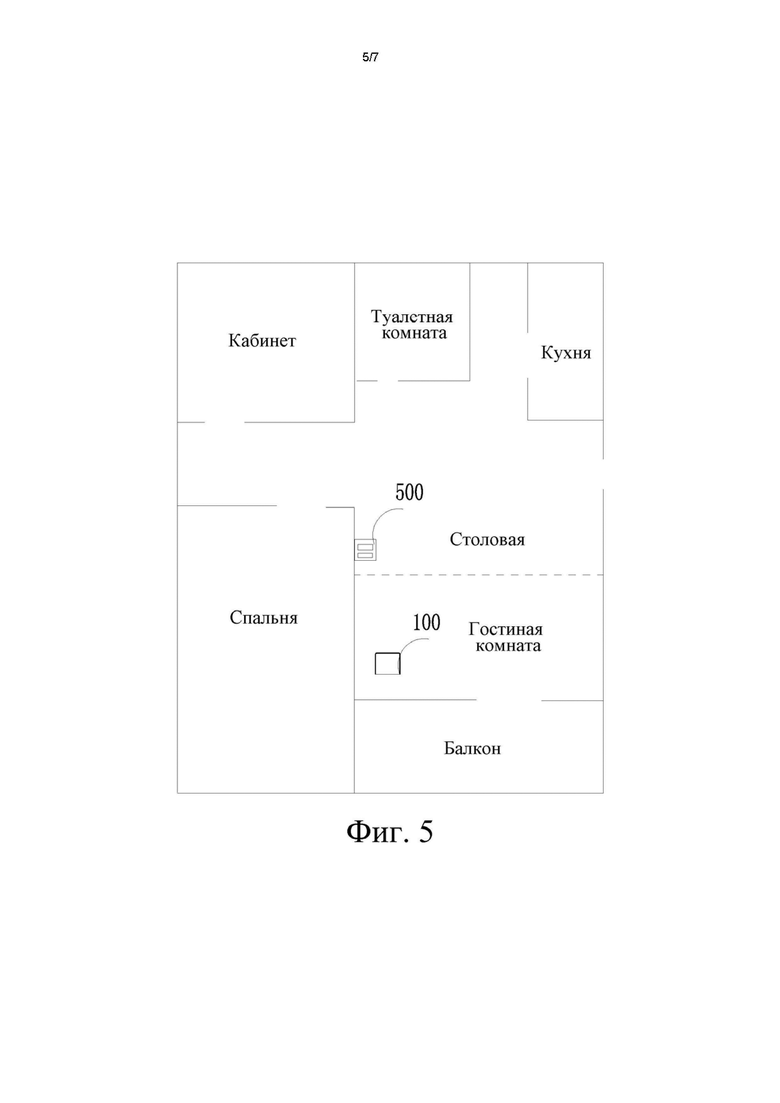
Фиг. 5 - схема сценария использования по одному примеру осуществления настоящего изобретения;
Фиг. 6 - главный вид робота-уборщика без энергетического блока по одному примеру осуществления настоящего изобретения;
Фиг. 7 - пространственная диаграмма портативного очистителя и энергетического блока по одному примеру осуществления настоящего изобретения.
ВАРИАНТЫ РЕАЛИЗАЦИИ ИЗОБРЕТЕНИЯ
Далее приведено подробное описание и техническое содержание настоящего изобретения в сочетании с чертежами, однако чертежи предоставлены только для справки и описания и не используются для ограничения настоящего изобретения.
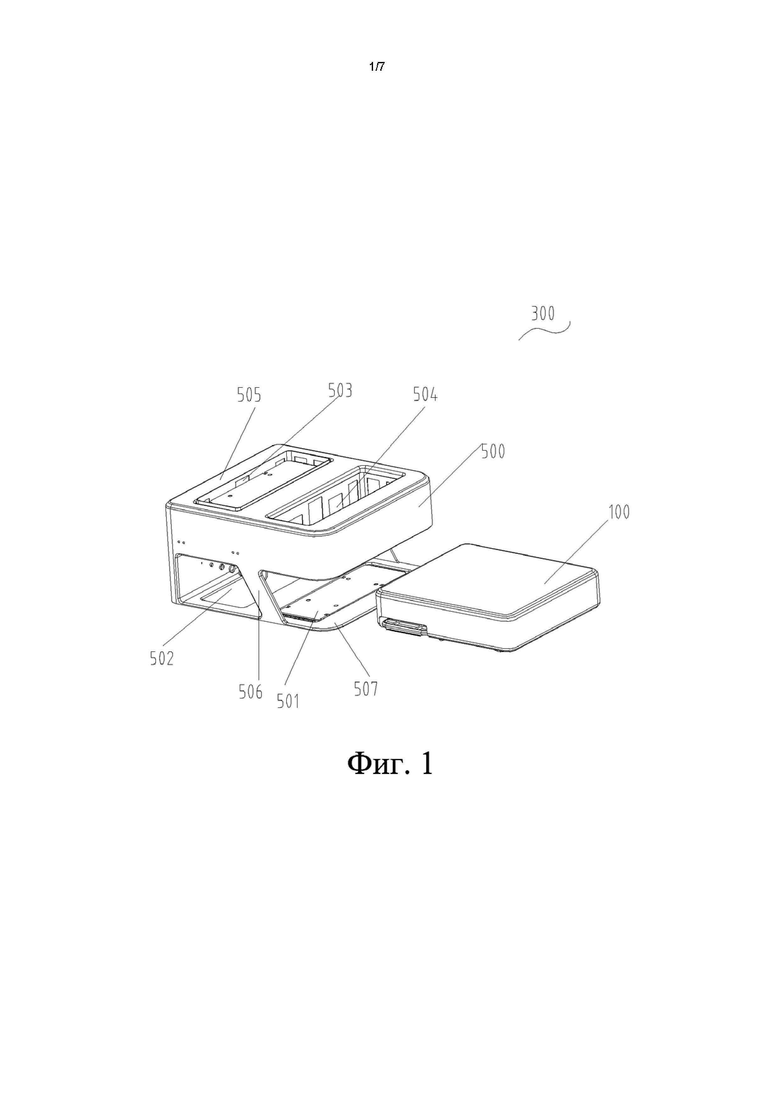
На фиг. 1 представлена схема системы робота-уборщика настоящего изобретения. Данная система робота-уборщика 300 может включать в себя базовую станцию 500 и робот-уборщик 100, робот-уборщик 100 может быть устройством, способным осуществить автономную замену обтирочных материалов. Соответственно, базовая станция 500, куда возвращается робот-уборщик 100 для зарядки, может использоваться как для зарядки робота-уборщика 100, так и для замены обтирочных материалов робота-уборщика 100. Базовая станция робота-уборщика, сочетающая функцию зарядки с функцией замены обтирочных материалов, позволяет сэкономить пространство пользователя. Когда робот-уборщик 100 должен возвращаться на базовую станцию 500, если было обнаружено, что нужно заменить обтирочные материалы или нужно подзаряжать робот-уборщик 100, то запускается программа возвращения на базовую станцию 500, при этом робот-уборщик 100 возвращается на базовую станцию 500 для выполнения автоматической замены обтирочных материалов и /или автоматической зарядки робота-уборщика 100. Согласно одному примеру осуществления упомянутые обтирочные материалы могут включать в себя: тряпку или обтирочную губку и др. Далее проводится описание на примере с использованием тряпки в качестве обтирочного материала.
Базовая станция 500 включает в себя нижнюю пластину 507, поддерживающую пластину 506 и верхнюю пластину 505, при этом верхняя пластина 505 соединена с нижней пластиной 507 через поддерживающую пластину 506. На верхней пластине 505 предусмотрены лоток для новых тряпок 503, лоток для старых тряпок 504 и устройство для замены тряпки (на фигуре не показано), а устройство для замены тряпки может использовать подъемный механизм, механизм качания и др., при этом проекции лотка для новых тряпок 503 и лотка для старых тряпок 504 на нижней пластине 507 соответствуют второй рабочей позиции 502 и первой рабочей позиции 501 робота-уборщика 100 на нижней пластине 507. Понятно, что позиции лотков для новых тряпок 503 и старых тряпок 504 не фиксированы, например, в других примерах осуществления настоящего изобретения позиции лотков для новых и старых тряпок можно поменять местами. Робот-уборщик 100 осуществляет разгрузку старой тряпки на первой рабочей позиции 501, которую утилизирует устройство для замены тряпки базовой станции 500, далее устройство для замены тряпки базовой станции 500 опускает новую тряпку, чтобы робот-уборщик 100 осуществил установку новой тряпки на второй рабочей позиции 502.
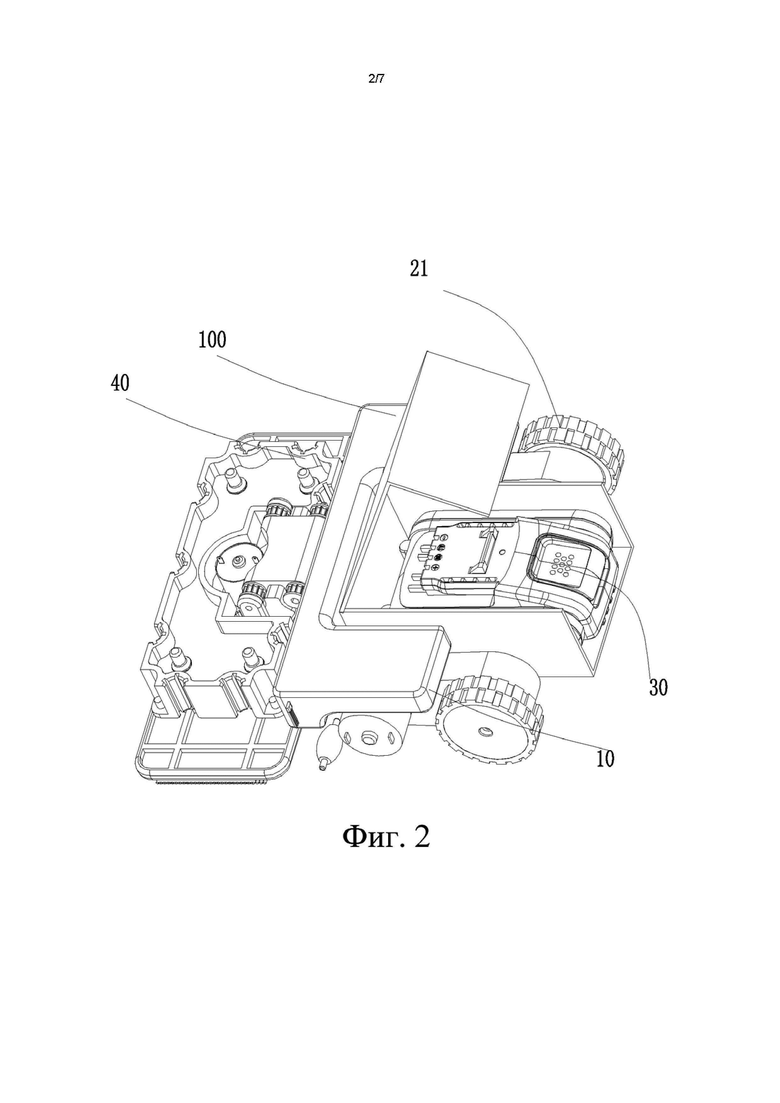
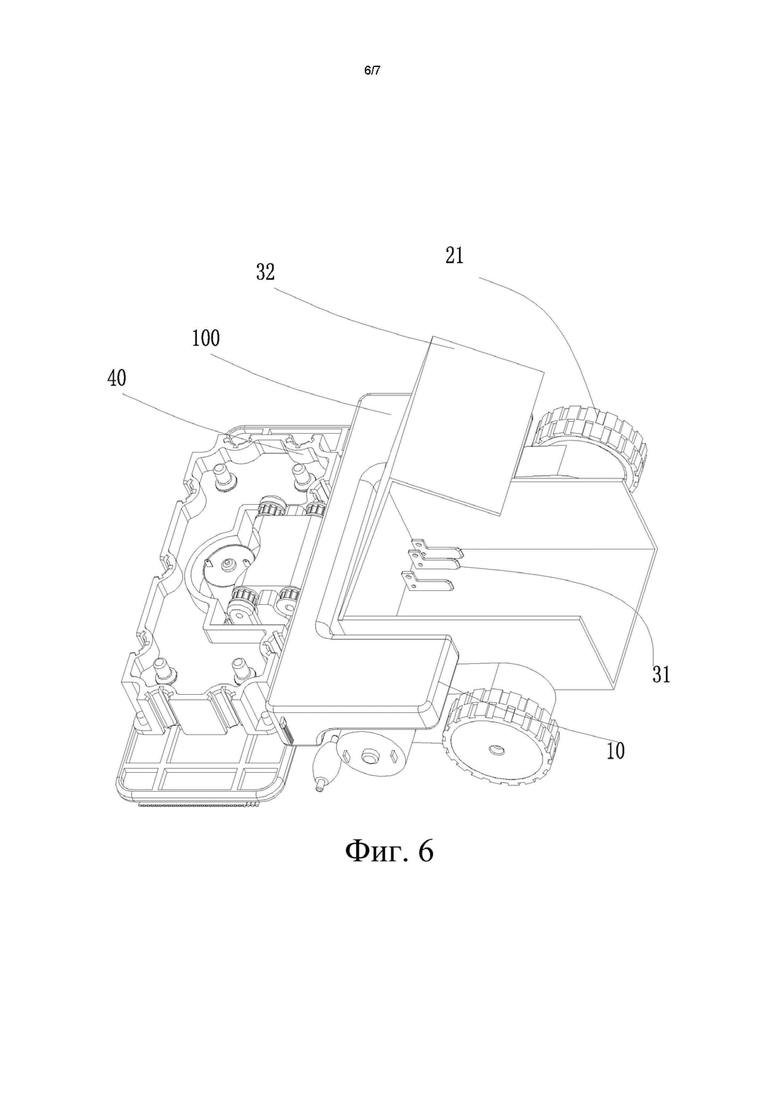
Как показано на фиг. 2 и фиг. 3, согласно данному примеру осуществления настоящего изобретения робот-уборщик 100 включает в себя корпус 10, механизм передвижения 20, энергетический блок 30, блок для мытья полов 40, силовой блок 50, блок управления 60, а также механизм навигации 70. Ходовые элементы механизма передвижения могут включать в себя ведущие колеса 21, предназначенные для приведения в передвижение робот 100, понятно, что ходовые элементы могут быть также гусеничными. Согласно одному примеру осуществления, робот-уборщик включает в себя также ведомые колеса (на фигуре не показаны). Энергетический блок 30 может быть выбран для питания робота-уборщика, а робот-уборщик может быть выбран для зарядки энергетического блока 30. Силовой блок 50 может включать в себя электродвигатель и передаточный механизм, соединенный с электродвигателем, передаточный механизм соединен с механизмом передвижения, а электродвигатель приводит в работу передаточный механизм, благодаря трансмиссии передаточного механизма двигается механизм передвижения, при этом передаточный механизм может быть червячным, коническим зубчатым механизмом и др. Силовой блок 50 может быть оснащен двумя группами электродвигателей, одна группа электродвигателей приводит в движение механизм передвижения, другая группа электродвигателей приводит блок для мытья полов в мытье полов с определенной частотой вибрации; силовой блок 50 также может быть оснащен только одной группой электродвигателей для приведения в движение механизма передвижения, понятно, что количество электродвигателей в каждой группе не ограничивается, например, может составлять один или два. Блок для мытья полов 40 может быть установлен на корпусе для выполнения заданной операции уборки рабочей поверхности (например, полов), при этом блок для мытья полов 40 может быть оснащен тряпкой. Согласно данному примеру осуществления робот-уборщик может быть роботом для домашнего и /или внутреннего пользования.
Механизм навигации может содержать, но не ограничиваясь этим, по меньшей мере, один из следующих: датчик зрения, ультразвуковой датчик, радарный датчик, оптический датчик (лазерный LDS или инфракрасный датчик и др.), UWB датчик, инерциальная навигационная система, спутниковая система позиционирования (GPS, Бэйдоу и др.) и др, чтобы предоставить данные для контроля окружающей среды, контролировать работу робота-уборщика, а также создать карту рабочих зон робота-уборщика. Рабочая зона робота-уборщика может быть одноэтажным жильем, а также многоэтажным жильем дачного типа, соответственно, созданная карта рабочих зон может составлять одну карту для одноэтажного жилья, также может составлять несколько карт для многоэтажного жилья, при этом каждая карта соответствует одному этажу. Когда рабочая зона составляет одноэтажное жилье, робот-уборщик работает непосредственно согласно данной карте; когда рабочая зона составляет многоэтажное жилье, пользователь может выбрать карту соответствующего этажа, на котором находится робот-уборщик, чтобы робот-уборщик начал работать согласно данной карте. Возможно также, что робот-уборщик распознает этаж, на котором он находится, с помощью датчика зрения и других способов, далее самостоятельно выбирает соответствующую карту для работы. Механизм навигации 70 может использоваться для отметки на карте рабочих зон местоположения, где находится робот-уборщик в данный момент. Отметка местоположения робота-уборщика в реальном масштабе времени с помощью механизма навигации 70 позволяет роботу-уборщику быстро вернуться к обозначенному месту для продолжения работы, например, когда робот-уборщик должен возвращаться для зарядки, он отмечает свое местоположение до ухода на зарядку, чтобы быстро добраться до места ухода для продолжения работы после завершения зарядки.
Согласно другому примеру осуществления настоящей заявки, робот-уборщик 100 может быть устройством для уборки, сочетавшим функции подметания и мытья полов. В этом случае кроме блока для мытья полов, робот-уборщик может включать в себя и блок для подметания полов 401, который может включать в себя роликовую щетку и боковую щетку, чтобы убрать пыль и иные мелкие загрязнения, что находятся на полу и в углах. Боковая щетка сметает мелкие загрязнения к роликовой щетке, которая убирает все загрязнения в пылесборник.
Блок управления, например, представляет собой контроллер, может быть встроенным цифровым сигнальным процессором (Digital Signal Processor, DSP), микропроцессором (Micro Processor Unit, MPU), специализированной интегральной схемой (Application Specific Integrated Circuit, ASIC), системой на чипе (System on Chip, SOC) программируемого логического устройства (Programmable Logic Device, PLD), центральным процессором (Central Processing Unit, CPU) или программируемой пользователем вентильной матрицей (Field Programmable Gate Array, FPGA) и т.д.
Контроллер может управлять роботом-уборщиком согласно предварительно заданной программе или поступившей команде. Конкретно, контроллер может управлять движением механизма передвижения в рабочих зонах робота-уборщика по предварительно заданному маршруту, во время приведения механизмом передвижения робота-уборщика в движение, блок для мытья полов осуществляет мытье полов (сухое или влажное), удаляя пылинку и другие мусора в рабочих зонах. Когда робот-уборщик завершил передвижение по предварительно заданному маршруту и выполнил операции уборки, под контролем контроллера робот-уборщик прекращает операции уборки и механизм передвижения передвигается, чтобы механизм передвижения вывел робот-уборщик из рабочей зоны. Маршрут передвижения и место парковки робота-уборщика задаются предварительно на контроллере и исполняются механизмом передвижения под контролем контроллера.
Согласно настоящей заявке робот-уборщик может быть устройством, способным осуществить автономную замену тряпки. Соответственно, базовая станция, куда возвращается робот-уборщик для зарядки, использоваться как для зарядки робота-уборщика, так и в качестве базовой станции для замены тряпки робота-уборщика. Сочетание функции зарядки с функцией замены тряпки на базовой станции робота-уборщика позволяет сэкономить пространство пользователя. Разумеется, можно задать отдельные места для замены тряпки робота-уборщика и для возвращения для зарядки. В этом случае когда робот-уборщик нуждается в замене тряпки, он возвращается в место для замены тряпки; а когда робот-уборщик нуждается в зарядке, он возвращается в место для зарядки, что не ограничивается настоящей заявкой. В этом случае место для замены тряпки может быть нефиксированным пунктом. Далее в настоящей заявке для удобства описания, если не указано иное, то когда описывается возвращение робота-уборщика для замены тряпки, место для возвращения может подразумевать базовую станцию, сочетавшую две функции: зарядку и замену тряпки, может также подразумевать базовую станцию для замены тряпки; соответственно, когда описывается возвращение робота-уборщика для зарядки, место для возвращения может подразумевать базовую станцию, сочетавшую две функции: зарядку и замену тряпки, может также подразумевать базовую станцию для зарядки робота-уборщика.
Робот-уборщик может включать в себя модуль отправления сигнала 80, если базовая станция данного робота-уборщика образована с сочетанием функции зарядки с функцией замены тряпки, упомянутый модуль отправления сигнала может отправить на базовую станцию сигнал о замене тряпки, когда робот-уборщик возвращается на базовую станцию для замены тряпки; может также отправить на базовую станцию сигнал о возвращении для зарядки, когда робот-уборщик возвращается на базовую станцию для зарядки. Соответственно, на базовой станции также существует модуль приема сигнала для принятия сигнала от робота-уборщика. Таким образом, когда возвращается робот-уборщик, базовая станция может заранее узнать цель возвращения робота-уборщика и заранее подготовить к этому, что позволяет избежать таких недостатков, как падение новых тряпок из-за того, что когда робот-уборщик возвращается для зарядки, но не может отправлять на базовую станцию соответствующий сигнал, при этом базовая станция обнаруживает, что робот-уборщик доходит до соответствующего места базовой станции, и ошибочно считает, что робот-уборщик нуждается в замене тряпки. Если функции зарядки и замены тряпки были установлены по отдельности, то когда робот-уборщик возвращается в пункт замены тряпки для замены тряпки, модуль отправления сигнала может отправить в пункт замены тряпки сигнал о замене тряпки. Соответственно, в пункте замены тряпки также существует модуль приема сигнала для принятия сигнала от робота-уборщика.
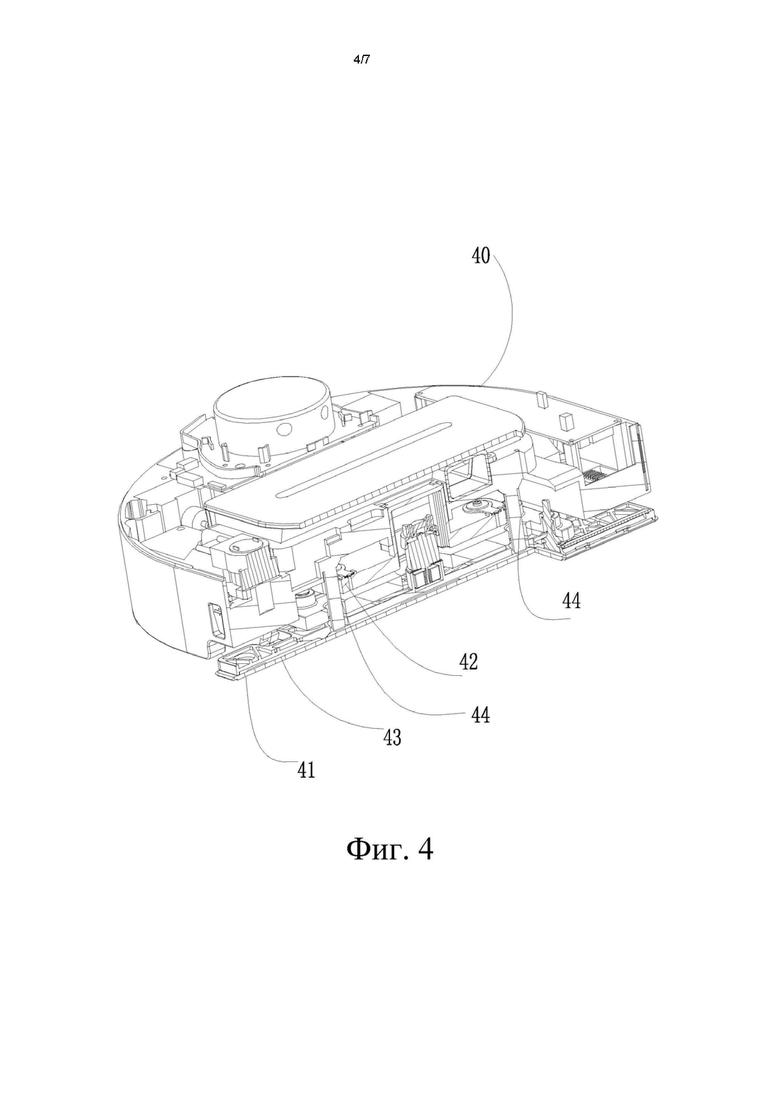
Как показано на фиг. 4, согласно одному примеру осуществления блок для мытья полов 40 также может включать в себя: пластину для мытья полов 43, на которой установлена тряпка 41 с возможностью разборки, пластина для мытья полов 43 и тряпка 41 могут быть автономными, также могут быть соединены с помощью текстильной застежки или двусторонней клейкой ленты и другими способами, что не ограничивается настоящей заявкой.
Как показано на фиг. 4, согласно одному примеру осуществления робот-уборщик может также включать в себя: подъемный механизм 42, соединенный с тряпкой 41 и способный изменять высоту блока для мытья полов относительно рабочей поверхности под контролем блока управления. Подъемный механизм 42 может быть использован для управления такими движениями блока для мытья полов, как подъем или опускание во всем процессе уборки. Соответственно, подъемный механизм 42 также может быть использован для управления подъемом или опусканием пластины для мытья полов 43 с тряпкой.
Согласно одному примеру осуществления блок для мытья полов установлен на упомянутом корпусе с возможностью разборки. Согласно одному примеру осуществления, как показано на фиг. 4, на корпусе робота-уборщика предусмотрено выступное устройство (в настоящей заявке указана как подпорка 44), когда блок для мытья полов поднимается до положения для разборки упомянутого блока для мытья полов, выступное устройство (подпорка 44) соприкасается с блоком для мытья полов, предоставляя блоку для мытья полов силу действия вниз, и тем самым заставляя блок для мытья полов отсоединиться от упомянутого корпуса. Корпус и блок для мытья полов 40 могут быть соединены друг с другом с помощью магнитов, механических застежек или путем создания разрежения. Когда под контролем блока управления подъемный механизм 42 поднимается до заданной высоты, подпорка 44 соприкасается с блоком для мытья полов 40, заставляя блок для мытья полов 40 отсоединиться от корпуса.
Блок для мытья полов робота-уборщика имеет, по меньшей мере, три положения высоты по отношению к рабочей поверхности в процессе работы: первое положение, когда робот-уборщик осуществляет операции мытья полов; второе положение, когда робот-уборщик передвигается или преодолевает препятствия; третье положение, когда робот-уборщик разгружает тряпку; при этом третье положение выше или равно второму положению, первое положение ниже второго положения, за счет изменения положения блока для мытья полов с помощью подъемного механизма, робот-уборщик может осуществить мытье полов, преодолеть препятствия, выполнить автоматическую замену тряпки и т.д. Разумеется, кроме вышеуказанных трех положений высоты, робот-уборщик может иметь четвертое положение для установки новой тряпки, четвертое положение ниже первого положения.
Ниже приведено описание отношения вышеуказанных положений на примере одного из сценариев использования. Когда робот-уборщик находится в режиме мытья полов, под контролем подъемного механизма тряпок тряпка должна находиться в первом положении, в этом случае между тряпкой и полом существует определенное давление, тряпка может соприкасаться с полом и иметь определенный избыток давления, тем самым и достигается хорошего эффекта очистки; когда робот-уборщик встречается с препятствиями во время мытья полов, под контролем подъемного механизма тряпка должна находиться во втором положении, при этом тряпка автоматически поднимается, второе положение должно выше высоты в рабочем режиме, но не выше высоты, при которой разгружается тряпка во избежание падения тряпки и пластины для мытья полов; когда робот-уборщик нуждается в замене тряпки в процессе мытья полов или возвращении для зарядки из-за того, что заряд ниже предварительно заданного порога, под контролем подъемного механизма тряпка поднимается до второго положения, при этом с помощью механизма навигации робот-уборщик может также создать координаты места, куда он должен вернуться, и отметить эти координаты на карте рабочих зон; при необходимости замены тряпки под контролем подъемного механизма тряпка поднимается до третьего положения для разгрузки тряпки, благодаря подпоркам, закрепленным на роботе-уборщике, падает пластина для мытья полов с тряпкой с робота-уборщика, преодолев магнитную силу, чтобы разгружать старую тряпку в первую рабочую позицию, которая может использоваться для разборки старой тряпки; после разгрузки старой тряпки, робот-уборщик осуществляет автоматическую установку новой тряпки, робот-уборщик может осуществить установку новой тряпки во второй рабочей позиции, после вступления аппарата в соответствующее положение пластина для мытья полов спускается до высоты для установки новой тряпки, при этом можно установить новую тряпку в чистящем узле благодаря магнитному притяжению, таким образом завершается операция установки новой тряпки; после установки новой тряпки или полной зарядки под контролем подъемного механизма тряпка поднимается до второго положения и робот-уборщик возвращается к отмеченному им местоположению на карте рабочих зон, когда он достигается до отмеченного местоположения, под контролем подъемного механизма тряпка переходит к первому положению для продолжения операций мытья полов; при необходимости приостановки роботом-уборщиком операций в процессе мытья полов, под контролем подъемного механизма тряпка поднимается до второго положения. Использование вышеописанного подъемного механизма для управления тряпкой, чтобы тряпка поднялась во время преодоления препятствий, позволило разрешить недостатки существующего уровня техники, при котором блок для мытья полов робота-уборщика в процессе работы имеет только второе положение во время мытья полов и высота преодолимых препятствий составляет почти 0, что приводит к ограничению очищаемых зон. Блок для мытья полов может управлять подъемным механизмом во время приостановки мытья полов, чтобы тряпка поднялась до второго положения, что разрешило недостатки существующего уровня техники, при котором полы покрыты жидкостью, что приведет к повреждению полов из-за того, что блок для мытья полов имеет только второе положение во время мытья полов. После замены тряпки или завершения зарядки робот-уборщик может также вернуться в место, где он остановился до замены тряпки, чтобы продолжить мытье полов с этого места, что позволяет избежать недостатков существующего уровня техники, при котором повторяют операции уборки в мытых зонах и упускают зоны немытыми, и повысить эффект уборки робота-уборщика. Более того, возможность осуществления автоматической замены тряпки позволяет повысить степень автоматизации робота-уборщика и улучшить пользовательский опыт.
Согласно данному примеру осуществления, как правило, робот-уборщик осуществляет замену тряпки на основании следующих случаев, которые, в частности, включают в себя: время использования тряпки, площадь мытых полов тряпкой, степень загрязнения или повреждения тряпки, а также изменение рабочих зон, чтобы повысить коэффициент использования тряпки, не вызывая вторичного загрязнения.
Согласно одному примеру осуществления настоящей заявки, робот-уборщик может включать в себя модуль синхронизации, с помощью которого фиксирует время работы тряпки и сравнивает данное время работы с предварительно заданным порогом времени. Если время работы больше или равно заданному порогу времени, то робот-уборщик возвращается для замены тряпки, формируя при этом координаты его местоположения до возвращения и отмечая на карте рабочих зон, после установки новой тряпки робот-уборщик возвращается в отмеченное место на карте рабочих зон для продолжения операций уборки.
Согласно другому примеру осуществления настоящей заявки, робот-уборщик может включать в себя модуль регистрации площади уборки, с помощью которого регистрирует площадь уборки тряпкой и сравнивает данную площадь с предварительно заданным порогом площади. Если площадь уборки выше или равна заданному порогу площади, то робот-уборщик возвращается для замены тряпки, формируя при этом координаты его местоположения до возвращения и отмечая на карте рабочих зон, после установки новой тряпки робот-уборщик возвращается в отмеченное место на карте рабочих зон для продолжения операций уборки.
Согласно другому примеру осуществления настоящей заявки, робот-уборщик может включать в себя датчик тряпки, с помощью которого проверяет чистоту тряпки. Если степень чистоты ниже заданного порога, то под контролем блока управления робот-уборщик возвращается для замены тряпки, формируя при этом координаты его местоположения до возвращения и отмечая на карте рабочих зон, после установки новой тряпки робот-уборщик возвращается в отмеченное место на карте рабочих зон для продолжения операций уборки; если степень чистоты тряпки выше или равна заданному порогу, то под контролем блока управления робот-уборщик продолжает операции уборки. Датчик тряпки может быть установлен под корпусом робота-уборщика, а именно может включать в себя, но не ограничиваясь этим, по меньшей мере, один из следующих: емкостный датчик, датчик тока, радарный датчик и оптический датчик.
Согласно примеру осуществления настоящей заявки, робот-уборщик может включать в себя блок контроля 110 для проверки категории рабочих зон, после завершения операций уборки блоком для мытья полов в текущей зоне блок контроля может проверить категорию следующей зоны для определения соответствия категории следующей зоны текущей зоне. Когда категория зоны признана разной, под контролем блока управления робот-уборщик передает пользователю информацию о необходимости замены тряпки или заменяет тряпку. Следует отметить, что согласно данному примеру осуществления завершение операций уборки блоком для мытья полов в текущей зоне не ограничивается завершением операций уборки на 100% площади текущей зоны, может включать такие ситуации, как, например, когда блок для мытья полов в основном завершает операции уборки в текущей зоне. На одном сценарии использования, когда робот-уборщик завершил операции уборки на 95% площади текущей зоны, с помощью блока контроля можно проверить категорию следующей зоны, если категория признана разной, то под контролем контроллера робот отправляет клиентскому терминалу сообщение о необходимости замены тряпки или осуществляет автоматическую замену тряпки.
Согласно данному примеру осуществления в рабочей зоне робота-уборщика включается, по меньшей мере, одна категория зоны, разделение зоны может быть выполнено пользователем самостоятельно или согласно предварительно заданному способу. Согласно одному примеру осуществления, после создания роботом-уборщиком карты рабочих зон пользователь может осуществить непосредственное разделение зоны на карте, отображенной у клиентского терминала, и сохранить результат разделения. Пользователь может провести разделение зоны на созданной карте рабочих зон в зависимости от реальных потребностей, например, можно разделить помещение на кухню, ванную комнату, спальню и другие зоны в соответствии с фактическим назначением зон. После разделения зоны для выполнения операций уборки можно использовать разные тряпки или разные способы уборки в разных зонах, например: сухой способ, влажный способ, или использование чистящих средств для мытья полов.
Согласно другому примеру осуществления робот-уборщик может также провести автоматическое разделение зоны на карте в процессе создания карты, отметить результат разделения на карте и сохранить его в соответствии с предварительно заданным заводом-изготовителем способом разделения по умолчанию. Например: робот-уборщик может проверить все зоны с помощью радара датчика зрения или оптического датчика (включая датчики LDS или TOF и др.), при обнаружении постельных принадлежностей и после сравнения с большим объемом данных в базе характеристик робота данная зона выделяется как спальня; при обнаружении таких предметов, как кухонная вытяжка, данная зона выделяется как кухня. После разделения зоны для выполнения операций уборки робот может использовать разные тряпки или разные способы уборки (определить необходимость использования чистящих средств) в разных зонах в зависимости от отмеченных на карте результатов разделения зоны. В процессе мытья полов роботом использование разных тряпок в разных категориях зон позволяет предотвратить такие недостатки, как загрязнение зон друг друга из-за использования одинаковых тряпок в разных зонах, тем самым, обеспечивая отсутствие возможности взаимных загрязнений грязью из разных категорий зон и повышая степень чистоты уборки роботом-уборщиком.
Согласно другому примеру осуществления, после создания роботом-уборщиком карты можно проверить категорию следующей зоны непосредственно в процессе выполнения операций уборки, не проводя вышеописанного разделения зоны, и определить необходимость замены тряпки в соответствии с результатом контроля категорий зоны в процессе выполнения операций уборки.
Согласно одному примеру осуществления настоящей заявки, если на карте были отмечены категории зон, то блок контроля может осуществляться с помощью запрограммированного алгоритма, то есть с помощью запрограммированного алгоритма выполняет проверку категорий зон. А именно, после завершения уборки в текущей зоне и до входа в следующую зону робот-уборщик сравнивает категории текущей рабочей зоны со следующей рабочей зоной на карте рабочих зон. При обнаружении разных категорий, то под контролем робот передает пользователю информацию о необходимости замены тряпки или заменяет тряпку; при обнаружении одинаковых категорий, то использует упомянутый в вышеприведенном примере осуществления датчик тряпки, предназначенный для проверки степени чистоты тряпки, чтобы провести дальнейшую проверку тряпки, что повторяться здесь не будет.
Согласно одному примеру осуществления настоящей заявки, данный блок контроля может быть представлен датчиком зрения или оптическим датчиком, в случае отметки на карте категорий зон или отсутствия такой отметки можно определить категорию зоны на основании изображений зон, обнаруженных с помощью датчика зрения или оптического датчика. А именно, после завершения уборки текущей зоны и до входа в следующую зону, робот-уборщик проверяет соответствие следующей убираемой рабочей зоны текущей рабочей зоне по категории с помощью датчика зрения, при обнаружении разных категорий, то под контролем робот передает пользователю информацию о необходимости замены тряпки или заменяет тряпку.
Согласно другому примеру осуществления настоящей заявки, данный блок контроля может быть представлен радарным датчиком, в случае отметки на карте категорий зон или отсутствия такой отметки можно определить категорию зоны на основании изменений электромагнитной волны, обнаруженной радарным датчиком. А именно, после завершения уборки текущей зоны и до входа в следующую зону, робот-уборщик проверяет соответствие следующей убираемой рабочей зоны текущей рабочей зоне по категории с помощью радарного датчика, при обнаружении разных категорий, то под контролем робот передает пользователю информацию о необходимости замены тряпки или заменяет тряпку.
Согласно одному примеру осуществления робот-уборщик может включать в себя модуль передачи сигнала 90, с помощью которого можно передать пользователю информацию о необходимости замены тряпки, при этом, данная информация может передаваться как удаленно, так и локально от робота-уборщика. А именно, удаленная информация может быть уведомлением о необходимости замены тряпки, отправляемым клиентскому терминалу. После получения данного уведомления пользователь может как лично заменить тряпку, так и дать роботу-уборщику команду заменить тряпку в автономном режиме. Локальная информация может как отображаться в человеко-машинном интерфейсе робота-уборщика, так и передаваться через световой или звуковой сигнал индикаторного блока робота-уборщика. При получении светового или звукового сигнала от робота-уборщика пользователь может как лично заменить тряпку, так и дистанционно или путем непосредственного нажатия на соответствующую кнопку, например физическую кнопку на роботе-уборщике или виртуальную кнопку в человеко-машинном интерфейсе, дать роботу-уборщику команду заменить тряпку в автономном режиме. Согласно другому примеру осуществления, робот-уборщик может заменить тряпку под контролем блока управления. Когда категория зоны признана разной, робот-уборщик заменяет тряпку под контролем блока управления как на базовой станции, сочетающей функцию зарядки с функцией замены тряпки, так и на базовой станции, временно созданной для замены тряпки.
Далее, при обнаружении блоком контроля одинаковых категорий зон можно проверить чистоту тряпки с помощью датчика тряпки. Если степень чистоты ниже заданного порога, то под контролем блока управления робот-уборщик отмечает текущее положение и заменяет тряпку, после замены тряпки робот-уборщик возвращается в отмеченное положение для продолжения операций уборки. Если степень чистоты тряпки выше или равна заданному порогу, то под контролем блока управления робот-уборщик выполняет операции уборки в следующей зоне.
Согласно одному примеру осуществления настоящей заявки, когда категория зоны признана разной, можно управлять роботом-уборщиком, чтобы он вернулся на базовую станцию для автоматической замены тряпки, поддерживая при этом блок для мытья полов робота-уборщика в поднятом положении.
Согласно одному примеру осуществления настоящей заявки, когда робот-уборщик возвращается для замены тряпки или возвращается на базовую станцию для зарядки, робот-уборщик может отметить на карте его местоположение, где он остановился до возвращения. А после замены тряпки или полной зарядки робот-уборщик может возвратиться непосредственно в отмеченное место и продолжить операции уборки по предварительно заданному маршруту, тем самым повышая эффект уборки робота-уборщика.
Далее приведено более подробное описание вариантов осуществления настоящей заявки в сочетании с конкретным сценарием использования.
На фиг. 5 представлена схема сценария использования по настоящей заявке. На данном сценарии использования базовая станция 500 может использоваться как для зарядки, так и для замены тряпки. Пользователь Сяо Ван использует робот-уборщик 100 для уборки своей квартиры. После создания роботом-уборщиком 100 карты компоновки квартиры Сяо Вана, Сяо Ван разделил свою квартиру на семь частей: спальню, кабинет, балкон, гостиную комнату, столовую, туалетную комнату и кухню в зависимости от назначений каждой комнаты, в том числе спальня и кабинет относятся к одной категории зоны. Робот-уборщик 100 отправляется с базовой станции 500 для осуществления мытья полов влажным способом. Согласно предварительно заданному маршруту робот-уборщик сначала направляется в спальню, где начинает мытье полов по сегментному маршруту. После мытья полов в спальне робот-уборщик 100 проверяет категорию следующей зоны, то есть кабинета, и обнаруживает, что здесь относится к той же категории, как и предыдущая зона - спальня, то проверяет степень чистоты тряпки с помощью датчика тряпки. Если робот-уборщик обнаруживает, что степень чистоты выше заданного порога, то передвигается в кабинет для продолжения операций уборки. Если в процессе уборки в кабинете было обнаружено, что степень чистоты ниже заданного порога, то робот-уборщик отмечает текущее положение и возвращается на базовую станцию 500 для замены тряпки, поддерживая при этом блок для мытья полов во втором положении и отправляя на базовую станцию 500 сигнал о возвращении для замены тряпки. После замены тряпки робот-уборщик возвращается в кабинет в отмеченное положение для продолжения операций уборки. После уборки кабинета робот-уборщик будет передвигаться в гостиную комнату по предварительно заданному маршруту, он сначала проверяет, соответствует ли гостиная комната кабинету по категории, если категории разные, то робот-уборщик возвращается на базовую станцию 500 для замены тряпки. После замены тряпки робот-уборщик передвигается в гостиную комнату для продолжения операций уборки. Таким образом, завершаются операции уборки всех комнат.
Автоматизированная система заряда, например, система заряда робота-уборщика. Робот-уборщик оснащен встроенным батарейным блоком, который закреплен внутри робота-уборщика и не снимается вручную. Монтаж и демонтаж батарейного блока осуществляются только с помощью инструмента для снятия винтов. Робот-уборщик способен автоматически выполнять рабочие задачи без ручного контроля, при недостатке электроэнергии автоматически возвращается на базовую станцию для зарядки энергетического блока робота-уборщика.
Что касается других портативных очистителей, таких как портативный пылесос, портативный прибор для уборки, когда портативный очиститель полностью разрядился, пользователь вынужден прекратить работу и взять портативный очиститель домой или в другие места для зарядки, который может продолжать работу только после полной зарядки, что не позволяет обеспечить своевременности и непрерывности работы. Следовательно, необходимо разработать новую автоматизированную систему заряда для решения поставленных задач.
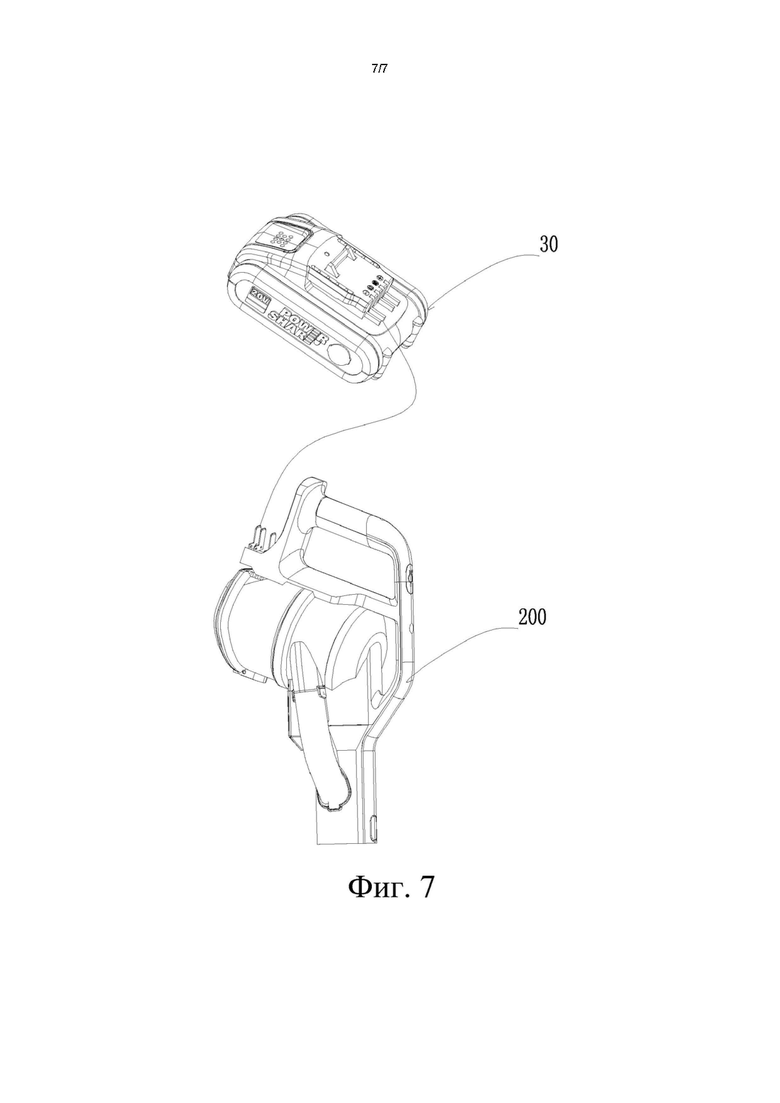
Как показано на фиг. 6 и фиг. 7, настоящая заявка также предоставляет автоматизированную систему заряда, составляющую из робота-уборщика (согласно настоящей заявке, например робота-уборщика 100 и др.), портативного очистителя 200 (например: портативного пылесоса, портативного прибора для уборки) и, по меньшей мере, одного энергетического блока 30, при этом энергетический блок 30 может быть выбран для питания робота-уборщика 100 или портативного очистителя 200 или для зарядки с помощью робота-уборщика 100 или портативного очистителя 200, то есть, пользователь может использовать энергетический блок 30 для питания робота-уборщика 100 или портативного очистителя 200, также может использовать робот-уборщик 100 или портативный очиститель 200 для зарядки энергетического блока 30. В качестве альтернативы энергетический блок 30 может заряжаться непосредственно через подставку для зарядки, подходящую к нему. Такой энергетический блок 30 может составлять несколько штук, таким образом, когда первый энергетический блок установлен на роботе-уборщике и выполняет работу по мытью полов, второй энергетический блок может быть установлен на портативном очистителе для подметания полов. Согласно другому примеру осуществления энергетический блок 30 может быть использован исключительно только для питания робота-уборщика. Для робота-уборщика и портативного очистителя можно использовать один и тот же энергетический блок 30, что позволяет использовать только один вид аккумулятора для решения всех проблем по уборке, тем самым обеспечивая экономию материалов и энергии.
Робот-уборщик 100 включает в себя корпус, на котором предусмотрен разъем для батарей для вмещения энергетического блока 30, собранного в разъеме для батарей с возможностью разборки. Возможность разборки подразумевает, что когда нужно разобрать энергетический блок 30, его снимают без откручивания винтов, гаек и других крепежей. Робот-уборщик 100 включает в себя корпус 10, механизм передвижения 20, блок для мытья полов 40, блок управления 60 и др., при этом механизм передвижения 20, блок для мытья полов 40 и блок управления 60 установлены на корпусе 10. Механизм передвижения приводит робот-уборщик 100 в передвижение в рабочей зоне, а блок для мытья полов 40 выполняет работу по мытью полов. Блок управления электрически соединен с механизмом передвижения, блоком для мытья полов 40, энергетическим блоком 30 и др. Под контролем блока управления механизм передвижения приводит робот-уборщик 100 в движение и блок для мытья полов 40 выполняет работу по мытью полов.
Согласно одному примеру осуществления настоящей заявки, энергетический блок 30 может накапливать электричество от внешнего источника питания через робот-уборщик, это значит, что пользователь может использовать робот-уборщик для зарядки энергетического блока 30. Согласно другому примеру осуществления настоящей заявки энергетический блок 30 может заряжаться с помощью простых зарядных устройств. То есть, согласно настоящей заявке можно заряжать энергетический блок 30 двумя способами: при одном способе - под контролем блока управления робота-уборщика робот возвращается на базовую станцию для зарядки энергетического блока 30, при другом способе - заряжать энергетический блок 30 с помощью внешнего зарядного устройства. Далее робот-уборщик может также включать в себя модуль отправления сигнала, который, в процессе зарядки робота-уборщика, отправляет клиентскому терминалу информацию об уровне заряда энергетического блока и/или информацию о времени работы робота-уборщика по имеющемуся уровню заряда. В случае, если пользователь установил на клиентском терминале номинальную мощность различных портативных очистителей, то на клиентском терминале можно также отображать информацию о времени работы различных портативных очистителей по имеющемуся уровню заряда.
Согласно одному примеру осуществления настоящей заявки, энергетический блок 30 может быть батарейным блоком, каждый батарейный блок может включать в себя, по меньшей мере, одну группу батарей, несколько групп батарей могут превратить напряжение батареи в требуемое рабочее напряжение посредством последовательно- параллельного преобразования.
Согласно одному примеру осуществления настоящей заявки, как показано на фиг. 6, робот-уборщик также оснащен первым вставным разъемом 31, портативный очиститель оснащен вторым вставным разъемом, энергетический блок 30 оснащен третьим вставным разъемом, когда первый вставной разъем 31 соединен с третьим вставным разъемом, может осуществляться как питание робота-уборщика 100 от энергетического блока 30, так и зарядка энергетического блока 30 с помощью робота-уборщика 100, кроме того, когда энергетический блок 30 отсоединен от робота-уборщика 100 и третий вставной разъем соединен со вторым вставным разъемом портативного очистителя, может осуществляться питание портативного очистителя от энергетического блока 30. При этом первый вставной разъем 31 на роботе-уборщике 100 может закрепляться с помощью уплотнительного элемента, например: клея, уплотнительного резинового кольца и др., чтобы обеспечить водонепроницаемость робота-уборщика.
Как показано на фиг. 2 и фиг. 6, робот-уборщик100 также включает в себя крышку 32, установленную на корпусе и покрывающую энергетический блок 30 снаружи. Крышка 32 предназначена для защиты от воды, влаги, прямого солнечного излучения и т.д. Согласно другим примерам осуществления, крышка 32 может использоваться только для выполнения одной или нескольких из таких функций, как защита от воды, влаги, прямого солнечного излучения и т.д. К примеру, крышка 32 может быть только водонепроницаемой и использоваться для предотвращения повреждения цепи из-за намокания энергетического блока 30 и батарейного блока 30 на разъеме для батареи, первого вставного разъема 31 и второго вставного разъема от дождя. Крышка 32 по настоящему изобретению независима от упомянутого корпуса.
Согласно настоящему изобретению крышка 32 установлена на корпусе и покрывает энергетический блок 30 снаружи. Согласно одному примеру осуществления крышка 32 соединена с корпусом с возможностью открытия, на крышке 32 и корпусе предусмотрено устройство застежки для прямого взаимного застегивания. Прямое взаимное застегивание подразумевает, что устройство застежки между крышкой и корпусом может разблокировать застежку, не используя винты или другие крепежные детали. Согласно другому примеру осуществления, крышка 32 закреплена на корпусе, крышка 32 и корпус образуют полость для вмещения энергетического блока 30.
Согласно вышеуказанным примерам осуществления можно установить энергетический блок 30 и крышка 32 в разных местах корпуса в зависимости от реальных ситуаций, преимущественно, установить под корпусом для предотвращения воздействий окружающей среды, таких как дождь и солнечное излучение. Можно также установить позади блока для мытья полов 40, в центре двух ведущих колес 21, чтобы стабилизировать центр тяжести робота-уборщика 100. Благодаря установке съемного и подключаемого к портативному очистителю энергетического блока, достигается технических результатов, заключающихся в том, что портативный очиститель автоматизированной системы заряда может получать электричество своевременно.
Вышеописанные примеры осуществления выражают только несколько вариантов осуществления настоящего изобретения, описание которых относительно конкретное и подробное, но его нельзя понимать как ограничение сферы действия патента на настоящее изобретение. Следует отметить, что для специалистов в данной области они могут сделать различные модификации и изменения, не отходя от общей концепции настоящего изобретения, но все модификации и изменения относятся к сфере защиты настоящего изобретения. Следовательно, сфера защиты настоящего изобретения должна определяться прилагаемой формулой изобретения.
Настоящее изобретение относится к роботу-уборщику и способу очистки, робот-уборщик включает: корпус; механизм передвижения, поддерживающий корпус и приводящий в передвижение робот-уборщик; силовой блок, предоставляющий движущую силу для обеспечения передвижения и работы; блок для мытья полов, предназначенный для установки на корпусе и выполнения заданной операции уборки, блок для мытья полов может быть оснащен обтирочными материалами; блок управления, электрически соединенный и управляющий силовым блоком для осуществления автоматического передвижения и автоматической работы робота-уборщика; блок контроля, предназначенный для проверки категории зоны, после завершения операций уборки блоком для мытья полов в текущей зоне, блок контроля проверяет категорию следующей зоны для определения соответствия категории данной зоны текущей зоне, когда категория зоны признана разной, под контролем блока управления робот-уборщик передает пользователю информацию о необходимости замены обтирочных материалов, или заменяет обтирочные материалы. Настоящее изобретение имеет следующие технические результаты: пятна из разных категорий зон не загрязняют друг друга, что повышает степень чистоты уборки роботом-уборщиком и улучшает пользовательский опыт. 2 н. и 18 з.п. ф-лы, 7 ил.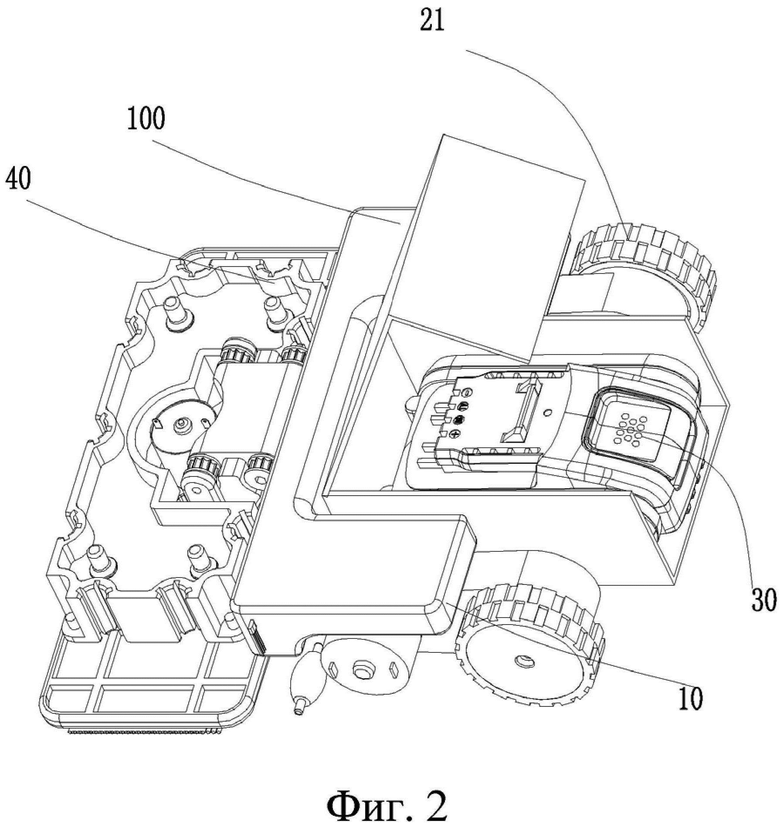
1. Робот-уборщик, совершающий передвижение и работу в рабочей зоне и включающий в себя:
корпус;
механизм передвижения, поддерживающий упомянутый корпус и приводящий в передвижение упомянутый робот-уборщик на рабочей поверхности;
силовой блок, предоставляющий упомянутому роботу-уборщику движущую силу для обеспечения передвижения и работы;
блок для мытья полов, предназначенный для установки на упомянутом корпусе и выполнения заданной операции уборки упомянутой рабочей поверхности, причем упомянутый блок для мытья полов выполнен с возможностью оснащения обтирочными материалами;
блок управления, электрически соединенный и управляющий упомянутым силовым блоком для осуществления автоматического передвижения и автоматической работы упомянутого робота-уборщика;
при этом упомянутый робот-уборщик также включает в себя блок контроля, предназначенный для проверки категории зоны, после завершения операций уборки упомянутым блоком для мытья полов в текущей зоне, упомянутый блок контроля проверяет категорию следующей зоны для определения соответствия категории упомянутой зоны текущей зоне, и, когда категории упомянутых зон признаны разными, под контролем упомянутого блока управления упомянутый робот-уборщик передает пользователю информацию о необходимости замены обтирочных материалов, или заменяет обтирочные материалы.
2. Робот-уборщик по п.1, в котором блок управления выполнен с возможностью управления роботом-уборщиком с целью передачи пользователю дистанционной информации или локальной информации от робота-уборщика, указывающей на необходимость замены обтирочных материалов.
3. Робот-уборщик по п.1, в котором упомянутый блок для мытья полов включает в себя: пластину для мытья полов, предназначенную для установки упомянутых обтирочных материалов с возможностью разборки.
4. Робот-уборщик по п.1, в котором блок управления выполнен с возможностью управления упомянутым роботом-уборщиком с целью возвращения на базовую станцию для замены упомянутого блока для мытья полов, когда категории упомянутых зон признаны разными.
5. Робот-уборщик по п.1, который также включает в себя: подъемный механизм, предназначенный для изменения высоты упомянутого блока для мытья полов относительно упомянутой рабочей поверхности под контролем упомянутого блока управления.
6. Робот-уборщик по п.5, в котором упомянутый подъемный механизм выполнен с возможностью приводить упомянутый блок для мытья полов в поднятие из первого относительно упомянутой рабочей поверхности положения до второго положения, когда упомянутый робот-уборщик возвращается на базовую станцию для замены упомянутого блока для мытья полов.
7. Робот-уборщик по п.5, в котором корпус содержит выступное устройство, выполненное с возможностью соприкосновения с упомянутым блоком для мытья полов, когда блок для мытья полов поднят до положения для разборки упомянутого блока для мытья полов, в результате чего упомянутый блок для мытья полов отсоединяется от упомянутого корпуса.
8. Робот-уборщик по п.1, в котором упомянутый блок для мытья полов установлен на упомянутом корпусе с возможностью разборки.
9. Робот-уборщик по п.1, в котором блок контроля выполнен с возможностью проверки категории зоны, способ разделения на которые определен пользователем или задан предварительно.
10. Робот-уборщик по п.1, в котором упомянутый блок контроля включает в себя, по меньшей мере, один из нижеследующих: датчик зрения, радарный датчик или оптический датчик, а категория зоны определяется в зависимости от результатов проверки упомянутого блока контроля.
11. Робот-уборщик по п.1, в котором упомянутый робот-уборщик также включает в себя механизм навигации, предназначенный для создания карты рабочих зон упомянутого робота-уборщика, а упомянутый блок контроля выполнен с возможностью проверки категории следующей зоны, основываясь на упомянутой карте рабочих зон.
12. Робот-уборщик по п.11, в котором упомянутый механизм навигации выполнен с возможностью отмечать текущее положение на упомянутой карте рабочих зон, когда упомянутый робот-уборщик возвращается на базовую станцию для замены обтирочных материалов, чтобы упомянутый робот-уборщик вернулся в отмеченное положение для продолжения работы после замены обтирочных материалов.
13. Робот-уборщик по п.1, в котором упомянутый блок робота-уборщика для мытья полов также включает в себя датчик тряпки, выполненный с возможностью проверки степени чистоты упомянутого обтирочного материала, когда категории зон признаны одинаковыми, и блок управления выполнен с возможностью управления упомянутым роботом-уборщиком для замены обтирочного материала, когда упомянутая степень чистоты ниже заданного порога.
14. Робот-уборщик по п.13, в котором упомянутый датчик тряпки установлен под упомянутым корпусом.
15. Робот-уборщик по п.13, в котором блок управления выполнен с возможностью управления упомянутым роботом-уборщиком для передвижения непосредственно в следующую зону для продолжения работы, когда степень чистоты упомянутого обтирочного материала выше или равна упомянутому заданному порогу.
16. Робот-уборщик по п.1, в котором упомянутый робот-уборщик также включает в себя модуль отправления сигнала, выполненный с возможностью отправки на базовую станцию сигнала о замене обтирочных материалов, когда упомянутый робот-уборщик возвращается на упомянутую базовую станцию для замены обтирочных материалов, или отправки на базовую станцию сигнала о возвращении для зарядки, когда упомянутый робот-уборщик возвращается на упомянутую базовую станцию для зарядки.
17. Робот-уборщик по п.1, в котором упомянутый робот-уборщик также включает в себя: энергетический блок, предоставляющий упомянутому роботу-уборщику энергию для обеспечения передвижения и выполнения работы.
18. Робот-уборщик по п.17, в котором упомянутый энергетический блок выполнен с возможностью быть выбранным для питания упомянутого робота-уборщика или упомянутого портативного очистителя.
19. Робот-уборщик по п.1, в котором упомянутый робот-уборщик является роботом для внутреннего пользования.
20. Способ очистки с помощью робота-уборщика, включающий:
применение робота-уборщика, который включает в себя корпус; механизм передвижения, поддерживающий упомянутый корпус и приводящий в передвижение упомянутый робот-уборщик; силовой блок, предоставляющий упомянутому роботу-уборщику движущую силу для обеспечения передвижения и работы; блок для мытья полов, предназначенный для установки на упомянутом корпусе и выполнения заданной операции уборки, причем упомянутый блок для мытья полов оснащен обтирочными материалами; и блок управления, электрически соединенный и контролирующий упомянутый силовой блок для осуществления автоматического передвижения и автоматической работы упомянутого робота-уборщика; при этом
после завершения операций уборки в текущей зоне проверяют категорию следующей зоны для определения соответствия категории упомянутой зоны текущей зоне; и
когда категории упомянутых зон признаны разными, передают пользователю информацию о необходимости замены обтирочных материалов или робот-уборщик заменяет обтирочные материалы.
| CN 108968812 A, 11.12.2018 | |||
| CN 206880637 U, 16.01.2018 | |||
| СИСТЕМА РОБОТА, СПОСОБНАЯ ОПРЕДЕЛИТЬ ОБЛАСТЬ ПЕРЕМЕЩЕНИЯ | 2005 |
|
RU2321487C2 |
| CN 103327865 A, 25.09.2013 | |||
| US 7166983 B2, 23.01.2007 | |||
| МОДУЛЬ ОБНАРУЖЕНИЯ ПРЕПЯТСТВИЙ И РОБОТ-УБОРЩИК, ВКЛЮЧАЮЩИЙ В СЕБЯ ТАКОВОЙ | 2013 |
|
RU2591912C1 |

