Изобретение относится к винтовым двигательным установкам со встроенными электродвигателями, конкретно к винтовым электрическим двигательным установкам, в которых электрическая энергия, подводимая к электродвигателям, преобразуется в механическую энергию вращения винта (например, воздушного винта летательного аппарата (ЛА), или гребного винта судна). Данные двигательные установки могут быть использованы в различных транспортных средствах авиации или судостроения.
Известна двигательная установка - Архитектура «Топос» электрического привода (патент RU №2786265 С2 от 10.06.2019 г., [1]), электрический привод воздушного винта которой содержит профилированное кольцо, воздушный винт в кольце, втулку, удерживающую воздушный винт, вал, на котором размещена указанная, свободно вращающаяся втулка, стойки, жестко фиксирующие взаимное расположение кольца и втулки. Привод выполнен в виде вентильного электрического двигателя, имеющего статор, секции обмотки которого размещены внутри указанного кольца, полюса распределенного ротора, расположенные на законцовках лопастей указанного воздушного винта, датчики положения указанных полюсов, систему управления. К патенту [1] есть достаточно много замечаний, подтверждающих некорректность и ошибочность заявленных в нем технических решений и выводов, не подтвержденных доказательствами автора этого патента. При этом в патенте [1] стоит обратить внимание не только на некорректность критики прототипа (патента [2]), но и на ошибочность технических решений, заявленных автором в патенте [1], а также абсурдность выводов автора, приведенных им в патенте [1] в обоснование предложенного им технического решения.
Существенными недостатками электрического привода архитектуры «Топос» являются: низкие значения тяги воздушного винта, высокие затраты электрической энергии привода на получение требуемой тяги воздушного винта, обуславливающие его низкое энергетическое качество, а также повышенная шумность работы воздушного винта архитектуры «Топос».
Низкие значения энергетического качества, а также повышенная шумность работы воздушного винта архитектуры «Топос» обусловлены именно тем, что полюса распределенного ротора (постоянные магниты) этого привода расположены только на законцовках лопастей воздушного винта.
В описании патента [1] сказано, что: «Технический результат изобретения заключается в увеличении энергетического качества электрической винтомоторной группы (BMP, используемого далее по тексту в качестве показателя эффективности ВМГ, значение которого определяется по аналогии с оценкой энергетического качества воздушного винта (Кэнк.), как отношение величины силы тяги (RТЯГИ ВИНТА), создаваемой данной ВМГ, к величине электрической мощности (NВИНТ), затраченной данной ВМГ для создания указанной силы тяги». При этом в описании патента [1] сказано, что: «Технический результат достигается тем, что лопасть 1 в качестве рычага 2го рода, длиной, равной радиусу R данного воздушного винта, под действием тангенциальной силы 3, возникающей при взаимодействии магнитных полей соответствующих элементов статора и ротора, и прикладываемой к элементу ротора 2, размещенному на законцовке i-ой лопасти 1, и равной F0i, создает на втулке 5 крутящий момент M0i, равный М0i=F0i × R. Пусть потребный крутящий момент, прикладываемый к втулке 5, равен МКРУТ. Указанный крутящий момент МКРУТ., при применении ВМГ архитектуры «Топос» равен МКРУТ.=n × M0i =n × (F0i × R), где n - число лопастей данного воздушного винта, участвующих в его создании в соответствии с алгоритмом, реализуемым устройством управления ВМГ».
Согласно описанию патента [1] число лопастей винта с магнитами, изображенного в описании патента [1] на Фиг. 01-04 равно десяти (n=10). При этом, также согласно [1], МКРУТ.=n × (F0i × R), из чего следует, что при кратном увеличении числа n (числа лопастей воздушного винта с магнитами) должно кратно возрастать и значение его крутящего момента МКРУТ.. Однако из теории проектирования воздушных винтов известно, что эффективность работы воздушного винта строго зависит от количества его лопастей, и их аэродинамических характеристик, поэтому для ВМГ архитектуры «Топос» произвольное кратное увеличение числа лопастей его винта с целью увеличения числа n и крутящего момента МКРУТ., практически невозможно. Исходя из этого сравним эффективности работы двух винтомоторных групп - ВМГ1 архитектуры «Топос», и отличной от нее ВМГ2. Для корректности сравнения считаем, что их винты имеют одинаковое число лопастей NЛОП., равное десяти (NЛОП.1=NЛОП 2=10), и одинаковый радиус описанной окружности концов их лопастей RЛОП. ( RЛОП.1=RЛОП.2). При этом в ВМГ1 постоянные магниты числом 10 (n1=10) установлены жестко на концах лопастей ее воздушного винта, а в ВМГ2 постоянные магниты большим числом, равным, например, 20 (n2=20) установлены жестко на бандажном кольце, закрепленном жестко на концах лопастей ее воздушного винта. Так как ВМГ1 и ВМГ2 по своим характеристикам должны удовлетворять одному и тому же ЛА, то очевидно, что для корректности сравнения эффективности работы ВМГ1 и ВМГ2 значения их тяги (RТЯГИ ВМГ) принимаем равными, т.е. R ТЯГИ ВМГ1=RТЯГИ ВМГ2, как и значения крутящих моментов (МКРУТ.ВМГ) на их валах т.е. МКРУТ.ВМГ1=МКРУТ.ВМГ2.
Так как показателем эффективности ВМГ является величина ее энергетического качества (КЭН.К), определяемая, как отношение максимальной тяги (RТЯГИ ВМГ), развиваемой ВМГ к электрической мощности (NВМГ), затрачиваемой ВМГ на создание этой тяги, то рассмотрим значения энергетического качества (КЭН.КЛ.1) и (КЭН.К2) воздушных винтов соответственно для ВМГ1 и ВМГ2.
Пусть потребные крутящие моменты, прикладываемые к валам винтов ВМГ1 и ВМГ2 равны:

где:
n1 - число постоянных магнитов на лопастях винта ВМГ1.
n2 - число постоянных магнитов на бандажном кольце винта ВМГ2.
F1 - совокупная электромагнитная сила, действующая на винт ВМГ1, равна 
F2 - совокупная электромагнитная сила, действующая на винт ВМГ2, равна
Из условия  а также, учитывая равенство
а также, учитывая равенство 
получаем:
 или
или  тогда
тогда

Электромагнитные силы F1 и F2, могут быть вычислены по формулам:

I1 - величина электрического тока на обмотках статора ВМГ1,
I2 - величина электрического тока на обмотках статора ВМГ2,
B1 - величина индукции магнитного поля, в котором находится проводник, по которому течет ток I1,
В2 - величина индукции магнитного поля, в котором находится проводник, по которому течет ток I2,
L - длина проводника, по которому течет ток I1 и ток I2.
Величины B1и В2магнитной индукции могут быть вычислены по формуле:
 где
где
μ - магнитная проницаемость внутри соленоида,
μ0 - магнитная постоянная, равная 4π×10-7,
nв - число витков на единицу длины обмотки.
Параметры μ μ0 nв не зависят от величины тока в обмотке и для электрических целей данного анализа могут быть заменены эквивалентной константой Сэкв.=μ × μ0 × nв, тогда при L1=L2


Для сравнения эффективности работы ВМГ1 и ВМГ2 оценим величину потребного электрического тока, подаваемого на обмотки статоров ВМГ1 и ВМГ2. Отношение тангенциальных сил, участвующих в создании крутящего момента М, с учетом зависимостей (2) и (3), равно

Тогда, согласно (2) имеем:

Мощность NВИНТ, поглощаемую винтами ВМГ1 и ВМГ2, можно оценить, как
 где
где
МКРУТ.ВМГ1 - потребный крутящий момент на валу винта ВМГ1,
Мкрут ВМГ2 - потребный крутящий момент на валу винта ВМГ2,
Ω - частота вращения винтов ВМГ1 и ВМГ2 (берется одинаковой для ВМГ).
Тогда согласно (1) запишем:

или с учетом (3) имеем

а с учетом (5) имеем

Для обеспечения на валах воздушных винтов ВМГ1 и ВМГ2 указанных значений потребных мощностей (NВИНТ ВМГ1 и NВИНТ ВМГ2), с бортовых источников электрической энергии снимаются именно такие значения мощности в соответствии с зависимостями 
где
U - электрическое напряжение на обмотках статоров (одинаковое).
ηэл - КПД электрического двигателя.
Тогда для ВМГ1 и ВМГ2 имеем:

а с учетом (7) имеем: 
Энергетическое качество ВМГ1 и ВМГ2 равно:

так как по условиям сравнения ВМГ1 и ВМГ2 значения их тяги
RТЯГИ ВМГ одинаковые, то следовательно, с учетом (5) имеем:
 где
где
выражение  является коэффициентом увеличения значения энергетического качества Кэн к для ВМГ.
является коэффициентом увеличения значения энергетического качества Кэн к для ВМГ.
Таким образом очевидно, что воздушный винт ВМГ2 с бандажным кольцом при n2=20 по энергетической эффективности является более эффективным в сравнении с воздушным винтом ВМГ1 архитектуры «Топос» с n1=10. Так для ВМГ2 при n2=20 значение k увел.э.к. составляет 1.4142, то есть увеличение энергетического качества воздушного винта с бандажным кольцом ВМГ2 относительно винта ВМГ1 составляет более 40%. С увеличением числа nг преимущество воздушного винта ВМГ2 с бандажным кольцом возрастает еще больше. Так для n2=30 значение k увел.э.к. составляет в 1.732, то есть увеличение энергетического качества воздушного винта КЭНК.2 составляет более 70%. Ограничение числа n2 определяется в основном конструкцией ВМГ2, учитывающей аэродинамику лопастей винта, а также и мощностью источника электроэнергии на борту ЛА.
Следует отметить, что выражение для определения величины энергетического качества (К0) ВМГ0, используемое автором патента [1] (Архитектура «Топос» электрического привода воздушного винта) в своем описании, и имеющего вид  является ошибочным.
является ошибочным.
С физической точки зрения это выражение является некорректным и абсурдным по сути, так как при условии R=r(а это условие должно являться одним из обязательных при сравнении эффективности различных ВМГ!!!) выражение  теряет физический смысл сравнения ВМГ0 и ВМГ базовой архитектуры, так как при этом условии K0=K1. Более того приведенное выражение является абсурдным еще и потому, что при R>r более эффективным является ВМГ0, а при R<r более эффективным является ВМГ. Тогда получается, что характеристики электродвигателей и все характеристики самого воздушного винта на энергетическое качество винта не оказывают влияние, раз энергетическое качество ВМГ определяется, и зависит только от величины радиуса лопастей (RЛОП.) этого винта. Из этого следует, что неверными и ошибочными являются не только ход рассуждений автора в описании его патента [1], но также и выводы, сделанные им в этом описании, а значит, ошибочным является и сам патент [1].
теряет физический смысл сравнения ВМГ0 и ВМГ базовой архитектуры, так как при этом условии K0=K1. Более того приведенное выражение является абсурдным еще и потому, что при R>r более эффективным является ВМГ0, а при R<r более эффективным является ВМГ. Тогда получается, что характеристики электродвигателей и все характеристики самого воздушного винта на энергетическое качество винта не оказывают влияние, раз энергетическое качество ВМГ определяется, и зависит только от величины радиуса лопастей (RЛОП.) этого винта. Из этого следует, что неверными и ошибочными являются не только ход рассуждений автора в описании его патента [1], но также и выводы, сделанные им в этом описании, а значит, ошибочным является и сам патент [1].
Другим недостатком патента [1] является повышенная шумность работы воздушного винта ВМГ0, обусловленная именно тем, что полюса распределенного ротора (постоянные магниты) расположены на законцовках лопастей воздушного винта. Вращаясь с большой окружной скоростью, эти магниты создают при рассечении потока воздуха мощные дополнительные завихрения, которые и является источником повышенной шумности работы этого воздушного винта. Учитывая то, что масса постоянных магнитов, расположенных на законцовках лопастей воздушного винта является существенной, то очевидно, что в процессе работы этого воздушного винта на его лопасти будет воздействовать дополнительная центробежная сила, приводящая его лопасти к значительной деформации (значительному увеличению Клоп, лопастей), что в свою очередь вызовет повышение вибрации этих лопастей, и, как следствие, повышение силовых нагрузок на лопасти винта, а это потребует упрочнения лопастей, и, как следствие, приведет к повышению массы винта. Повышение вибрации лопастей воздушного винта также приводит к дополнительному повышению шумности его работы. Обычно для устранения или минимизации вибрационных нагрузок, действующих на воздушный винт (вентилятор), на концах его лопастей устанавливают жестко бандажное кольцо, и/или на некотором расстоянии от оси вращения воздушного винта устанавливают дополнительно силовой каркас, выполненный в виде плоского кольца, жестко связывающего середины лопастей винта.
Известна также двигательная установка - «Пропульсивная система Соловьева» [2] (патент RU №2 326 021 С2, от 24.07.2006 г.), используемая для вращения гребных винтов различных водных транспортных средств (например, лодок, катеров, яхт, и т.д.), являющаяся ближайшим аналогом (прототипом) заявляемой винтовой биротативной электрической двигательной установки.
Пропульсивная система включает автономный корпус (направляющую насадку) 1, два идентичных модифицированных погружных реверсивных электродвигателя, расположенных соосно, каждый из которых состоит из: статора электрического двигателя 2, ротора 3, кругового кольца 4, закрепленного к внутренней поверхности ротора, гребного винта 5, лопасти которого жестко связаны с внутренней поверхностью кольца, ступицы гребного винта 6 и общего вала ротора и гребного винта 7. Носовой (передний) электродвигатель системы имеет носовую стойку (носовые стойки) 8, закрепленную к корпусу 1 или статору 2, носовой подшипник 9 вала в стойке 8. Аналогично кормовой (задний) электродвигатель имеет кормовую стойку (кормовые стойки) 10, закрепленную к корпусу или статору, кормовой подшипник 11 вала. Посредине между электродвигателями размещена средняя стойка 12, закрепленная к корпусу, с опорно-упорными подшипниками 13 для вторых концов валов обоих роторов (гребных винтов). Кроме этого для неповоротной пропульсивной системы имеется перо рулевого механизма 14, штанга 15 для поворотной пропульсивной системы, а также электрический кабель 16.
Основным существенным недостатком патента [2] является то, что корпус 1 Пропульсивной системы по форме представляет собой профилированное кольцевое крыло, при этом входная часть проточного тракта в корпусе 1 выполнена сужающейся, а сопловая часть проточного тракта в корпусе 1 представляет собой диффузор, то есть выполнена расширяющейся по потоку рабочего тела. Корпус 1 не предназначен для создания подъемной силы, и более того он не способен ее создать, поэтому выполнение корпуса 1 в виде профилированного кольцевого крыла никак не способствует повышению эффективности работы Пропульсивной системы, а наоборот. Если для входной части корпуса 1 сужение проточного тракта оправдано и обусловлено увеличением скорости входящего в него потока рабочего тела, то для сопловой части, выполненной в виде расширяющегося диффузора, расширение проточного тракта является ошибочным, так как в этом случае скорость истечения рабочего тела на выходе из корпуса 1, имеющего форму диффузора, будет уменьшаться, что в свою очередь приведет к уменьшению мощности и эффективности работы Пропульсивной системы. Очевидно, что в качестве сопловой части проточного тракта корпуса 1 необходимо использовать не диффузор, а конфузор, обеспечивающий увеличение скорости истечения рабочего тела из корпуса 1, и соответственно - увеличение мощности и эффективности работы Пропульсивной системы. Для рассмотрения этого утверждения воспользуемся фундаментальным уравнением аэрогазотермодинамики (широко используемым при создании авиационной и ракетной техники) - Уравнением Обращения Воздействий (УОВ) в дифференциальной форме, описывающим поведение потока рабочего тела в проточном тракте двигательных установок. Учитывая осесимметричность проточного тракта Пропульсивной системы, ограничимся рассмотрением одномерной модели стационарного течения рабочего тела в каналах, в виде:

где
М - число Маха;
V - скорость потока рабочего тела;
а - скорость звука в потоке рабочего тела;
F - площадь характерного сечения проточного тракта - (геометрическое воздействие);
ρ - плотность потока рабочего тела;
hps - энтальпия потока рабочего тела;
Т - температура потока рабочего тела;
ξ - коэффициент гидравлического сопротивления;
R - радиус;
qx - тепловая энергия, подводимая к потоку рабочего тела;
или отбираемая у потока - (тепловое воздействие);
Q - расходная функция - (расходное воздействие);
f х - внешняя сила, воздействующая на поток рабочего тела.
Так как для данной двигательной установки qx=0, dQ=0 и fх=0, то последние три члена уравнения (1) можно принять равными нулю,

Тогда уравнение (1) примет следующий вид:

Так как при течении потока рабочего тела в проточном тракте корпуса 1 значение числа М не превышает 1.0, то для увеличения скорости истечения рабочего тела из проточного тракта корпуса 1 (определяемой левой частью уравнения  первый член
первый член  (геометрическое воздействие) должен иметь отрицательные значения, то есть для увеличения скорости истечения рабочего тела из корпуса 1 без подвода к его потоку дополнительной массы рабочего тела и тепловой энергии, выходное сечение сопловой части корпуса 1 должно сужаться. Второй член
(геометрическое воздействие) должен иметь отрицательные значения, то есть для увеличения скорости истечения рабочего тела из корпуса 1 без подвода к его потоку дополнительной массы рабочего тела и тепловой энергии, выходное сечение сопловой части корпуса 1 должно сужаться. Второй член  будет иметь положительные значения, при этом отношение
будет иметь положительные значения, при этом отношение  является самым сильным и действенным членом уравнений (1) и (3), доминирующим над всеми членами, влияющими на уменьшение скорости истечения рабочего тела. Таким образом, уравнение (3) показывает, что при скоростях истечения рабочего тела из корпуса 1 Пропульсивной системы с числом М, меньшим 1.0, для повышения мощности и эффективности ее работы, сопловая часть проточного тракта корпуса 1 должны иметь сужающуюся по потоку форму - то есть форму конфузора. В подтверждение значимости первого члена (
является самым сильным и действенным членом уравнений (1) и (3), доминирующим над всеми членами, влияющими на уменьшение скорости истечения рабочего тела. Таким образом, уравнение (3) показывает, что при скоростях истечения рабочего тела из корпуса 1 Пропульсивной системы с числом М, меньшим 1.0, для повышения мощности и эффективности ее работы, сопловая часть проточного тракта корпуса 1 должны иметь сужающуюся по потоку форму - то есть форму конфузора. В подтверждение значимости первого члена ( - геометрическое воздействие) уравнения (3), следует сказать, его роль этого члена очень велика, и является доминирующей. Так, например, известно, что в двухконтурных газотурбинных двигателях (ТРДЦ), в которых течение рабочего тела описывается уравнением (3), только за счет изменения геометрии проточного тракта второго контура по длине (только за счет изменения члена
- геометрическое воздействие) уравнения (3), следует сказать, его роль этого члена очень велика, и является доминирующей. Так, например, известно, что в двухконтурных газотурбинных двигателях (ТРДЦ), в которых течение рабочего тела описывается уравнением (3), только за счет изменения геометрии проточного тракта второго контура по длине (только за счет изменения члена  ) удается получить до 80-85% мощности ТРДД, и лишь только 20-15% мощности обеспечивает работа его первого контура.
) удается получить до 80-85% мощности ТРДД, и лишь только 20-15% мощности обеспечивает работа его первого контура.
Другими существенным недостатком патента [2] является отсутствие регулирования шага винтов, а также исполнение первого и второго винтов в традиционной классической форме, с вращением их лопастей в плоскости, расположенной к валу под углом 90°.
Техническим результатом заявляемой винтовой биротативной электрической двигательной установки является повышение мощности и эффективности ее работы по КПД, а также повышение энергетического качества ее работы, определяемого отношением мощности, развиваемой винтами двигательной установки, к затрачиваемой для этого энергии ее электродвигателя.
Вышеуказанный технический результат достигается тем, что винтовая биротативная электрическая двигательная установка, содержит корпус с внутренним профилированным проточным трактом, в котором на оси симметрии установлена втулка, соединенная жестко с корпусом с помощью силовых стоек, внутри которой установлены подвижно с помощью подшипниковых опор валы первого и второго винтов, вращающихся в противоположные стороны, а концы лопастей каждого винта соединены со своим бандажным кольцом, выполненным с магнитами на его внешней стороне, и являющимся ротором электродвигателя, а вокруг каждого кольца расположены коаксиально обмотки статоров электродвигателей, жестко закрепленные на внутренней стенке корпуса. При этом корпус выполнен к выходу из его внутреннего профилированного проточного тракта сужающимся, в виде конфузора, две силовые стойки расположены противоположно и диаметрально и выполнены удлиненными так, что проходят через корпус насквозь, на его внешнюю сторону, и соединены с приводами, а концы лопастей каждого винта соединены со своим бандажным кольцом подвижно через радиально-упорные подшипники, с возможностью поворота лопастей относительно их оси симметрии с помощью механизмов регулирования шага винтов, расположенных соответственно на обоих концах втулки, при этом внутри удлиненных силовых стоек расположены сдвоенные силовые электрические кабели питания статоров электродвигателей, а также электрический кабель управления работой механизмов регулирования шага винтов.
Кроме того, лопасти первого и второго винтов установлены в плоскости, расположенной под углом 90 градусов к оси их валов, или под углами от 85 градусов до 45 градусов относительно оси их валов.
Техническое решение поясняется материалами, представленными на чертежах Фиг. 1-5, и на фото Фиг. 6-12, не охватывающими, и не ограничивающими весь объем притязаний данного технического решения, а являющимися частными примерами выполнения данного технического решения.
По тексту и на чертежах Фиг. 1-5 заявленной винтовой биротативной электрической двигательной установки через « ' » обозначены тождественные детали, выполненные зеркально.
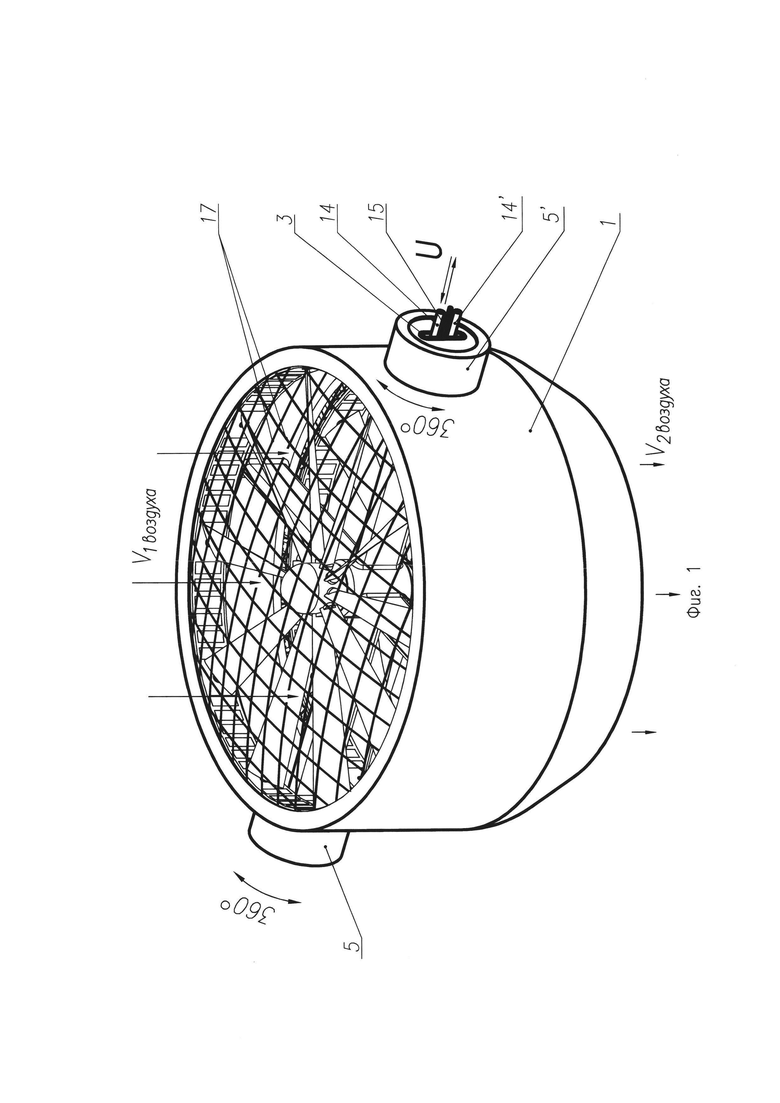
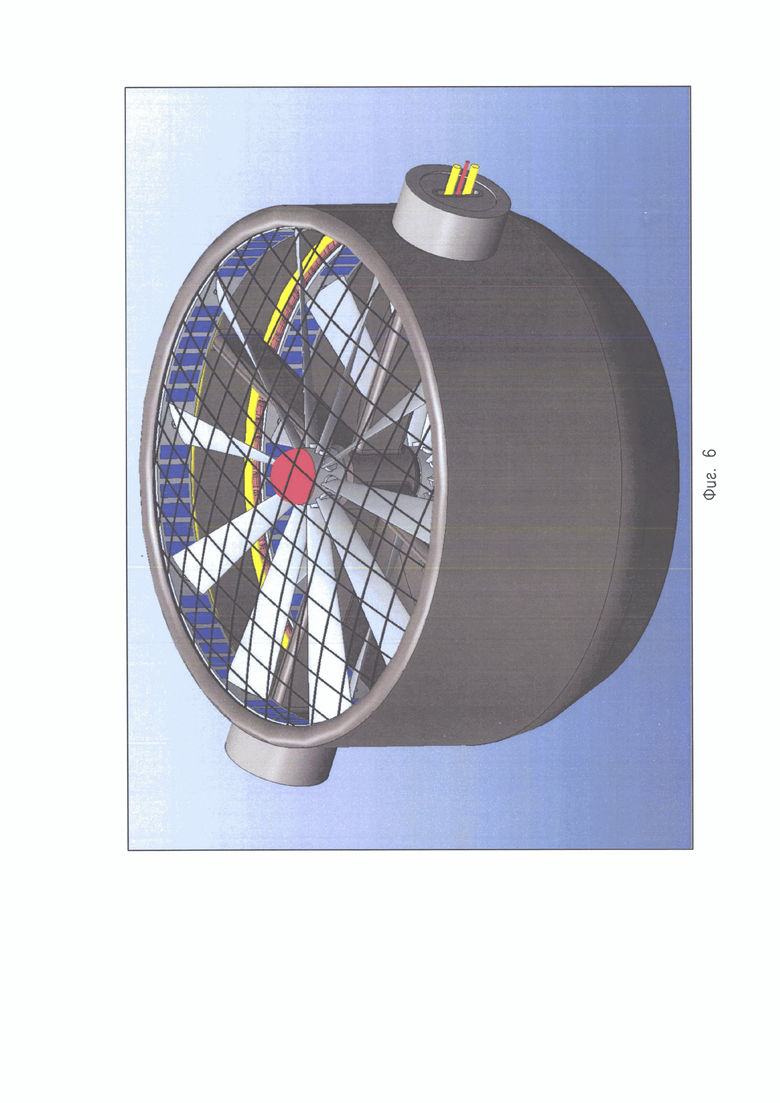
На чертеже Фиг. 1 и на фото Фиг. 6 изображена винтовая биротативная электрическая двигательная установка, (вариант с винтами, лопасти которых установлены под углом 90° к оси их валов, общий вид).
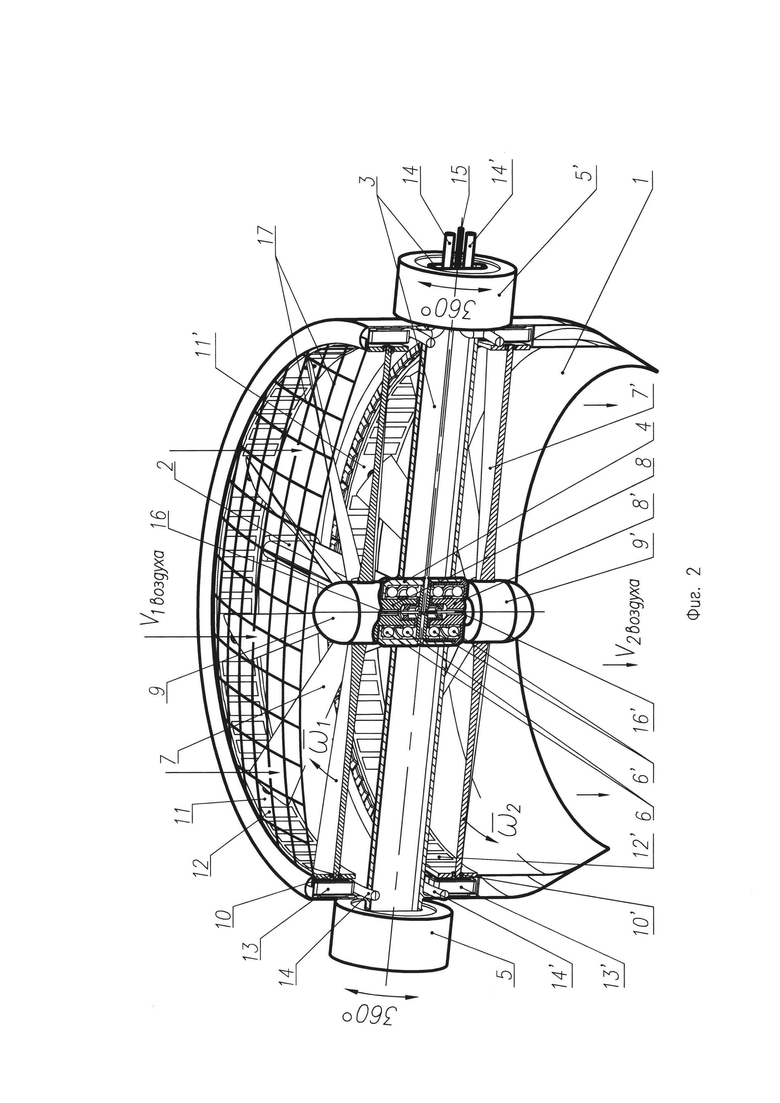
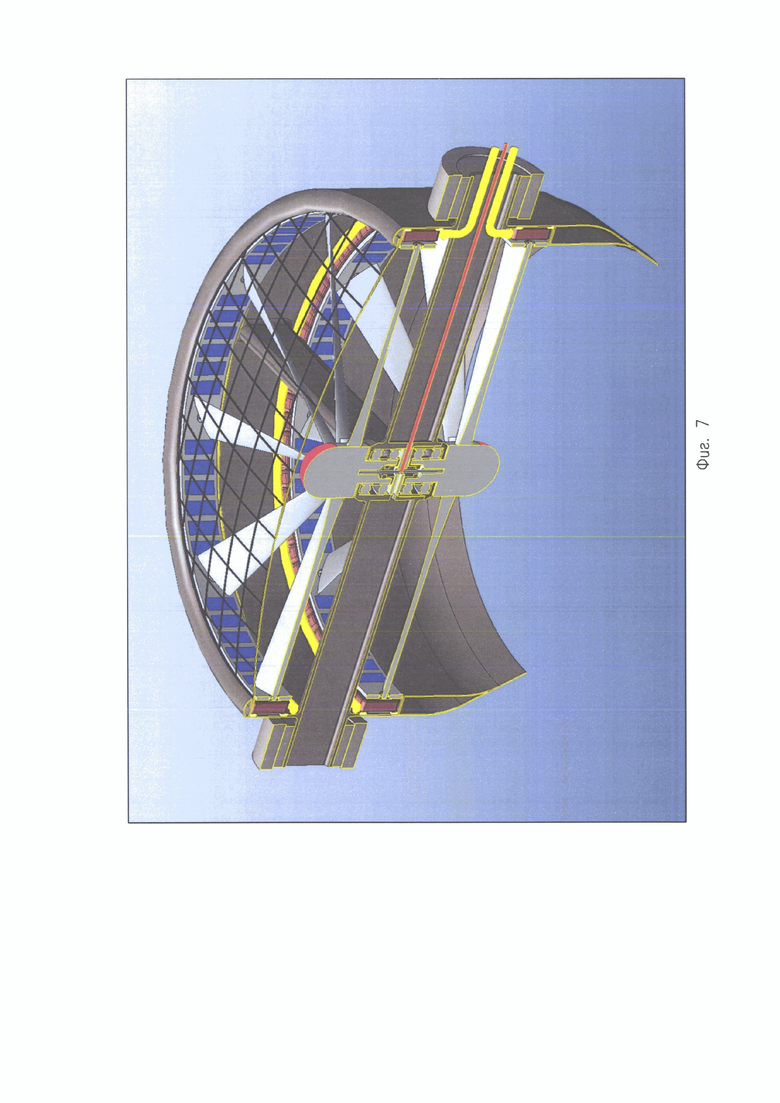
На чертеже Фиг. 2 и на фото Фиг. 7 изображена винтовая биротативная электрическая двигательная установка (вариант с винтами, лопасти которых установлены под углом 90° к оси их валов, аксонометрия, диаметральное сечение).
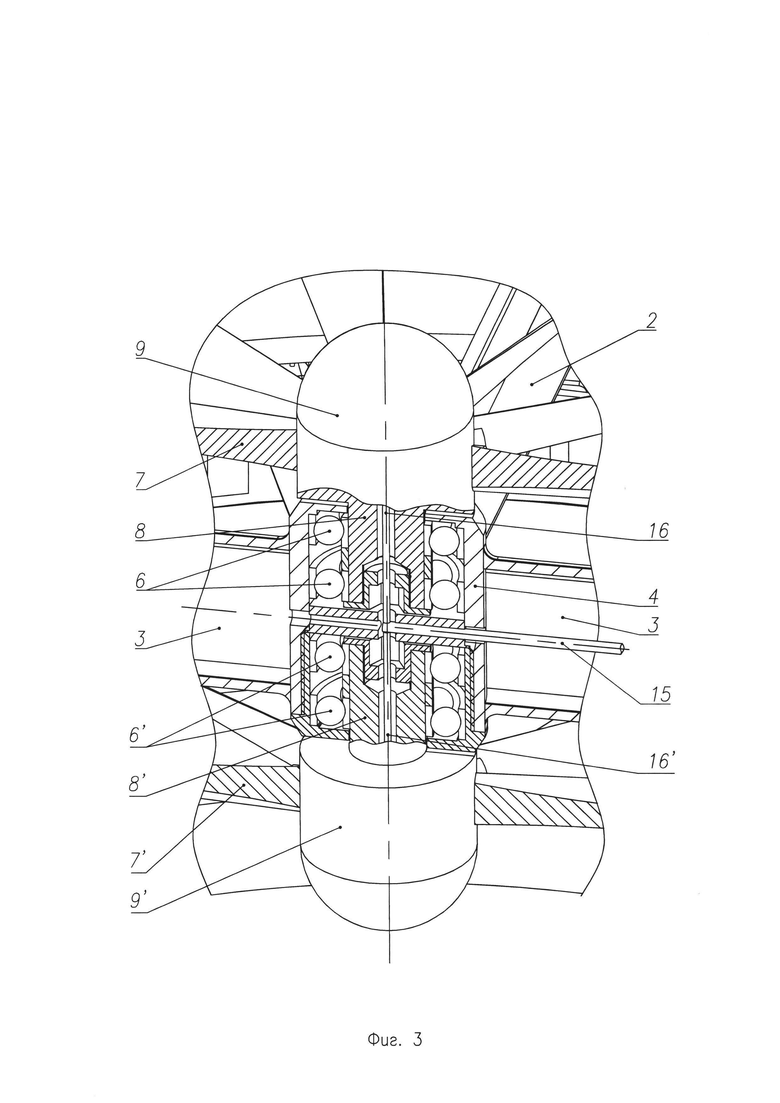
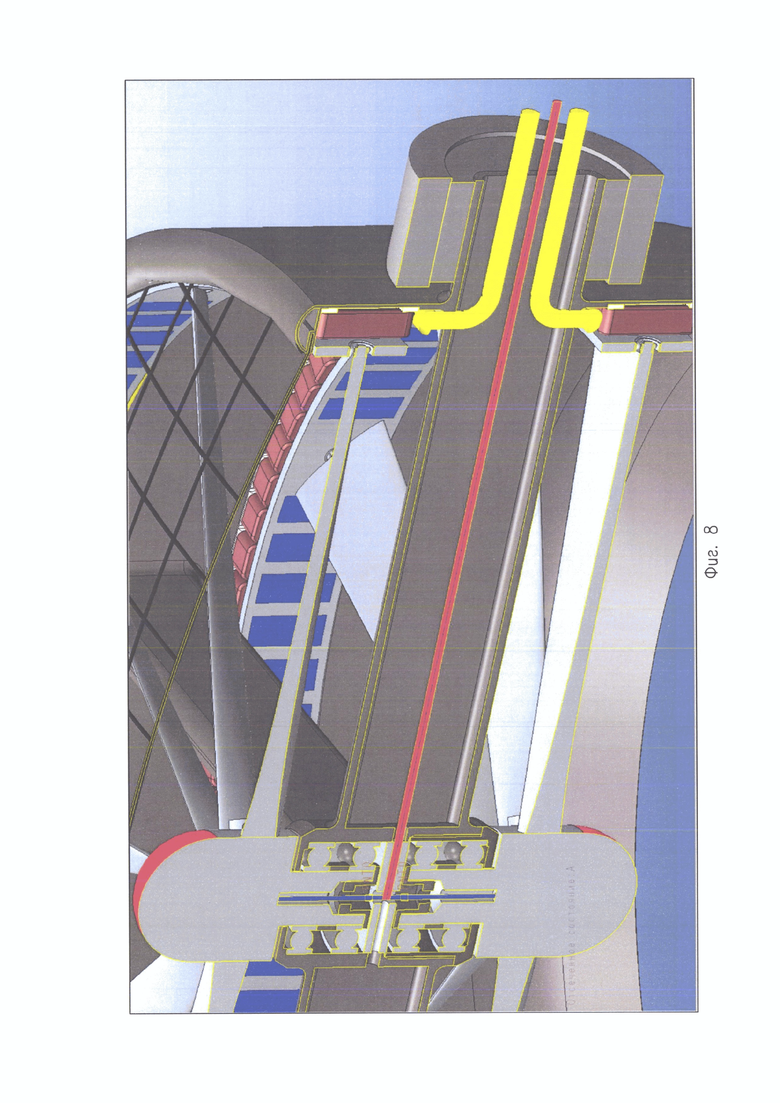
На чертеже Фиг. 3 и на фото Фиг. 8 изображена винтовая биротативная электрическая двигательная установка (вариант с винтами, лопасти которых установлены под углом 90° к оси их валов, показано в аксонометрии, частичное диаметральное сечение сборно-разборной втулки).
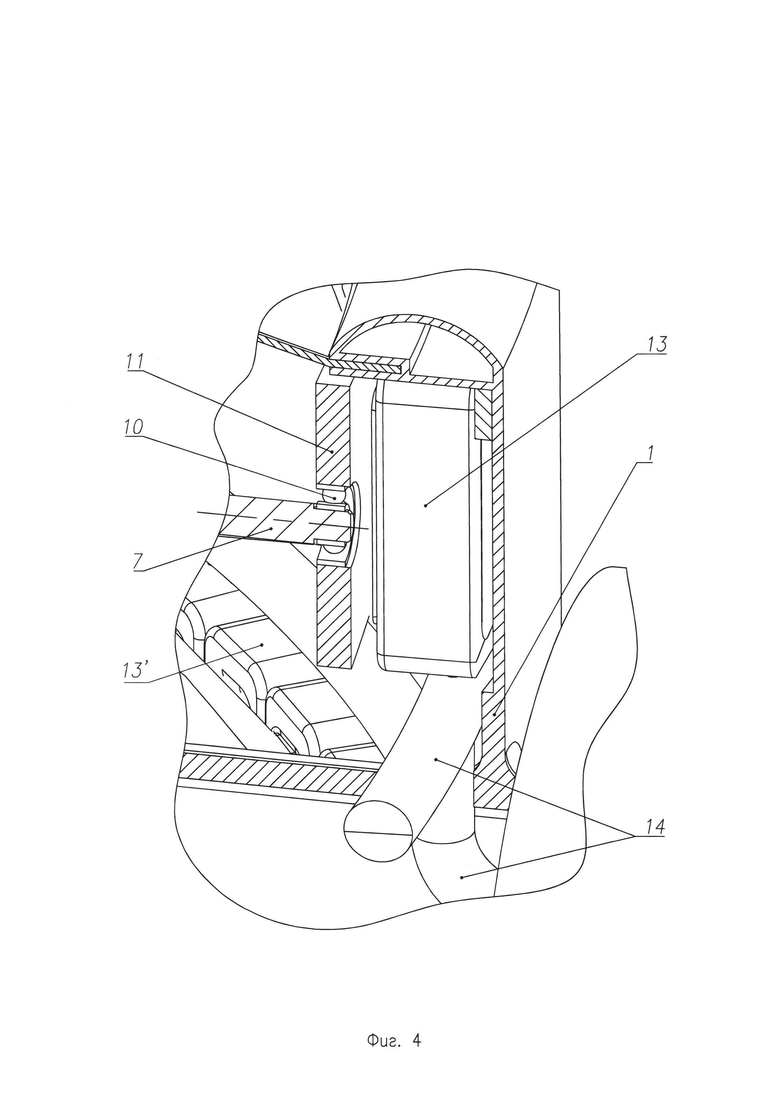
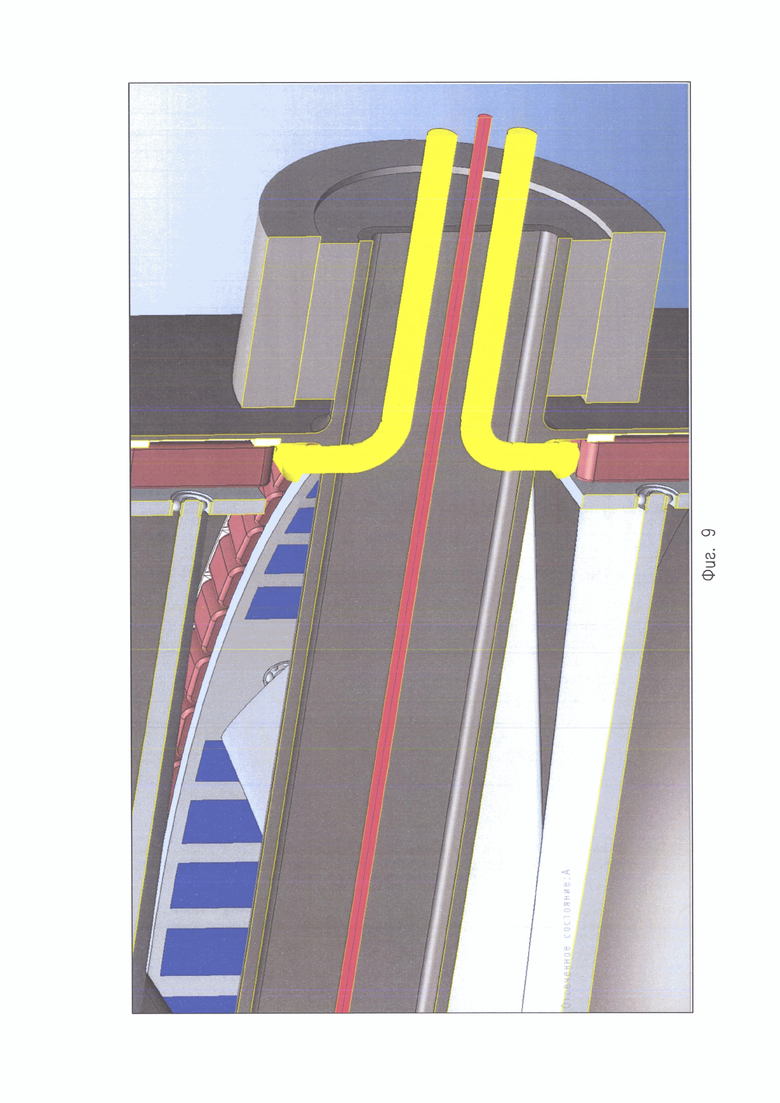
На чертеже Фиг. 4 и на фото Фиг. 9 изображена винтовая биротативная электрическая двигательная установка (вариант с винтами, лопасти которых установлены под углом 90° к оси их валов, показано подшипниковое соединение концов лопастей винтов с прочным бандажным кольцом).
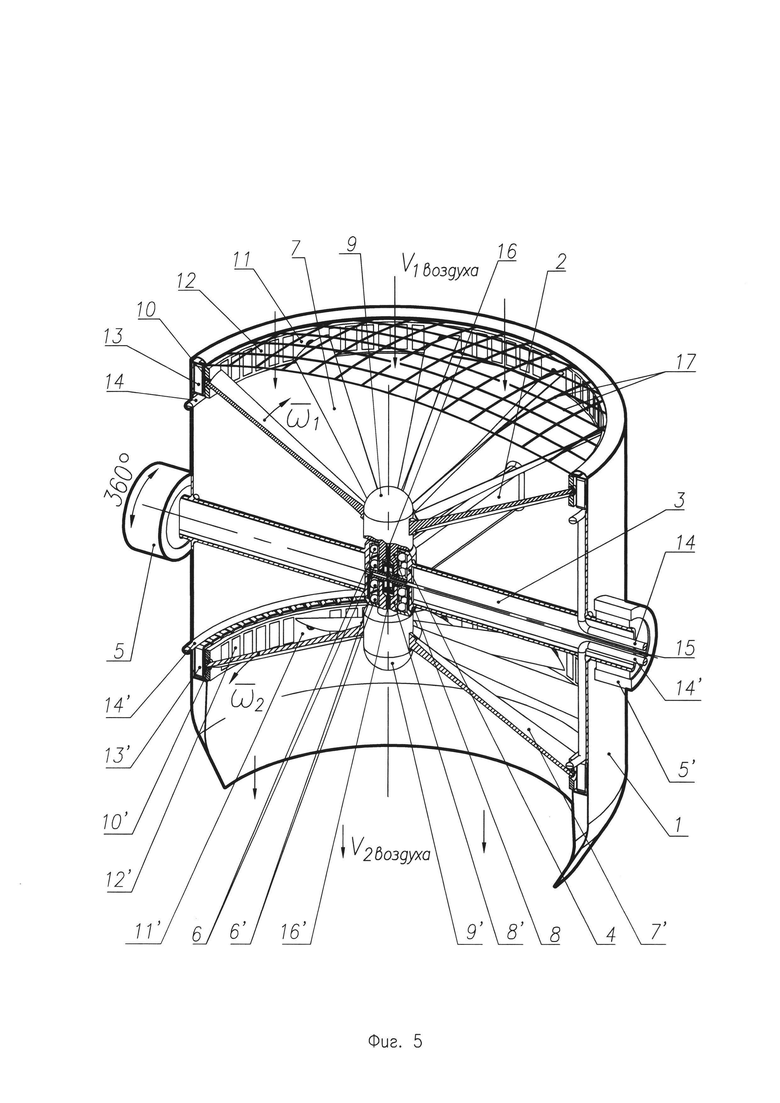
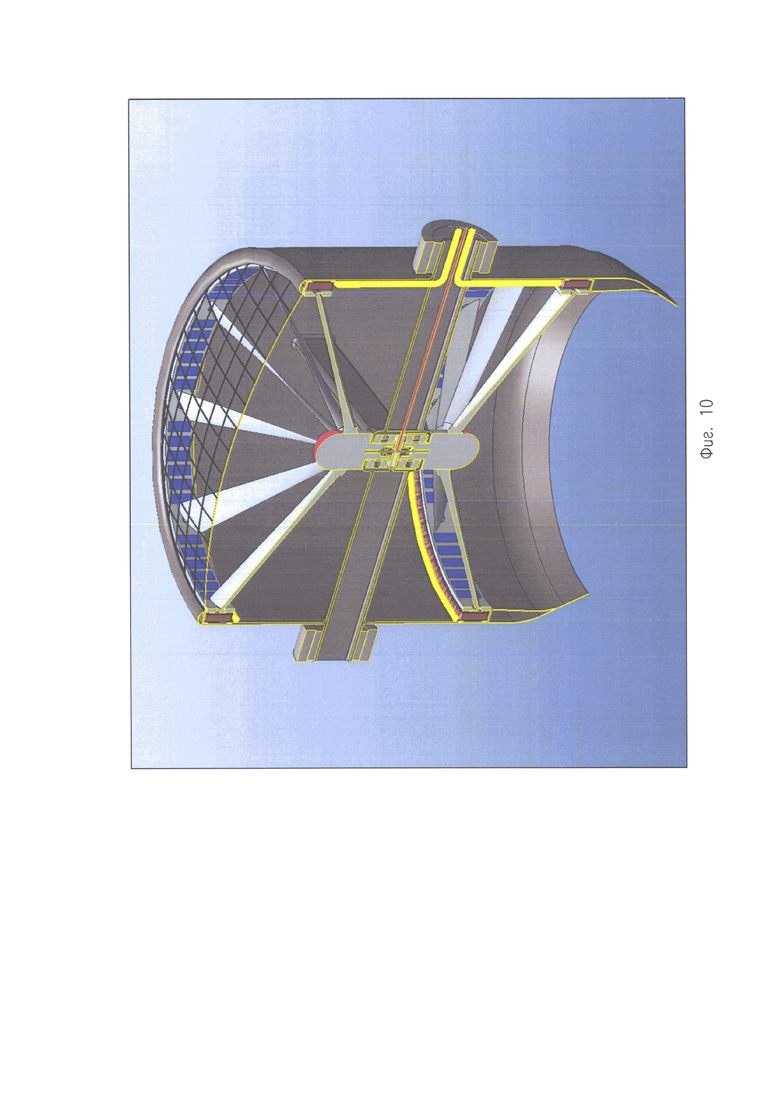
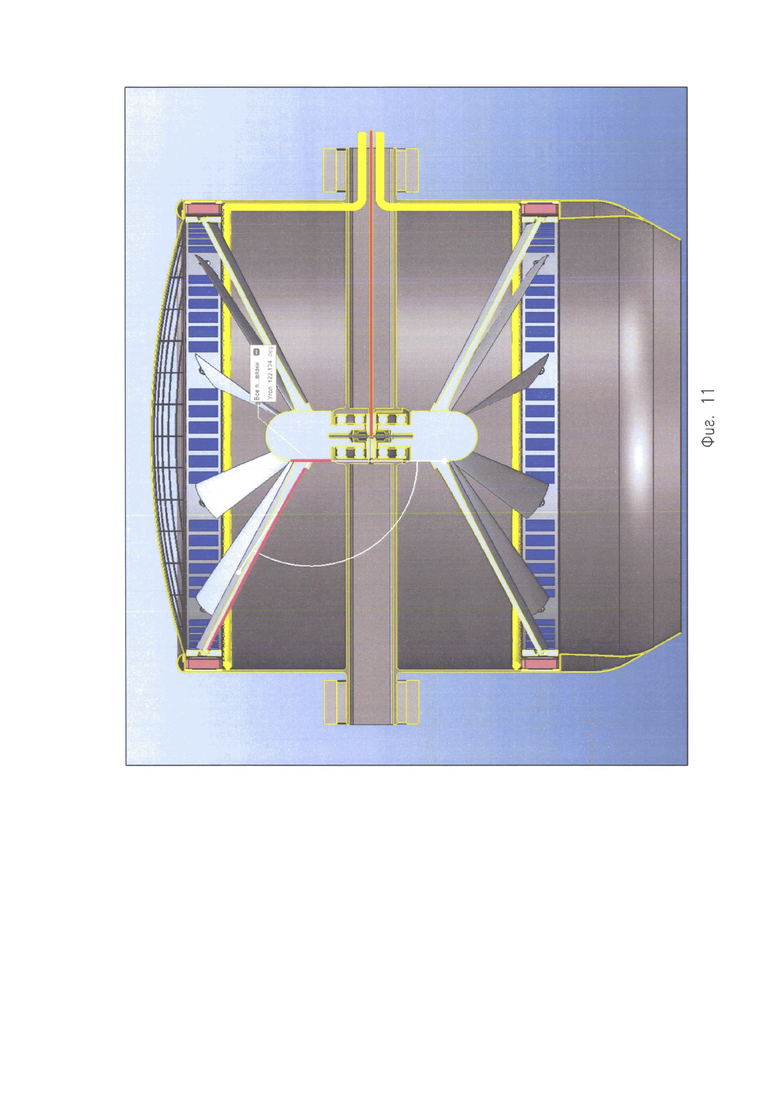
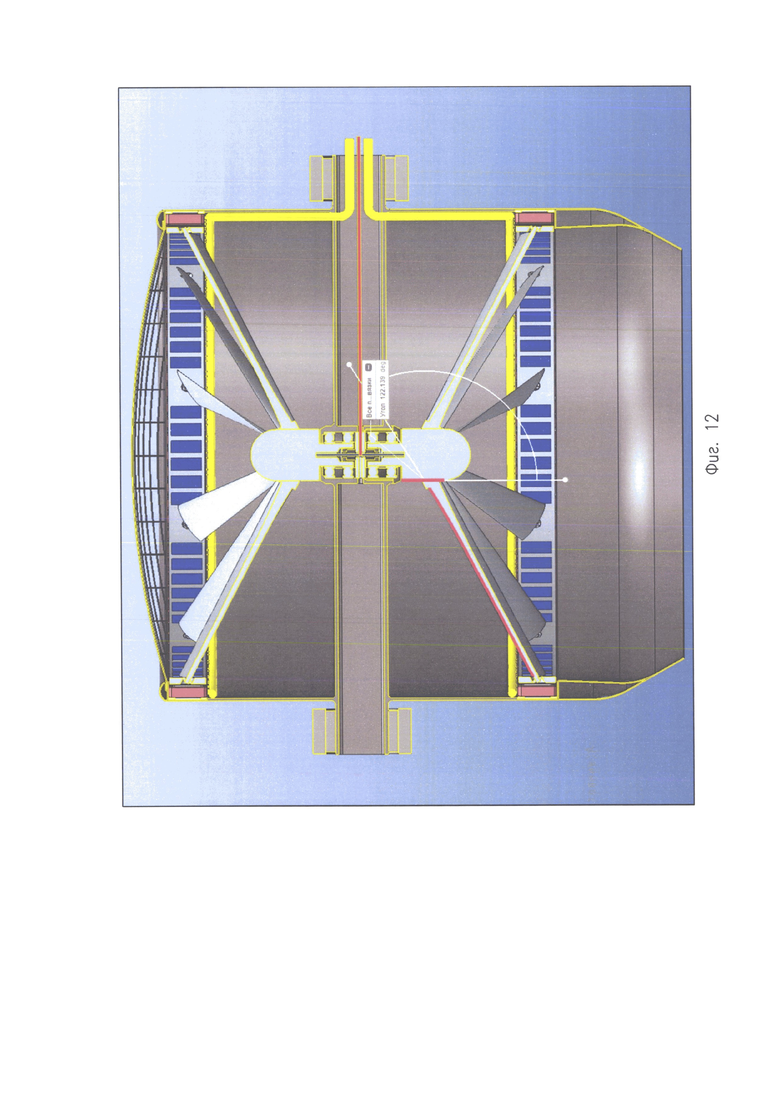
На чертеже Фиг. 5 и на фото Фиг. 10-12 представлена заявленная винтовая биротативная электрическая двигательная установка с расположением лопастей первого и второго винтов под углом относительно их валов.
В соответствии с чертежами Фиг. 1-5 и фото Фиг. 6-12 ниже представлен перечень основных элементов заявленной винтовой биротативной электрической двигательной установки:
1 - корпус;
2 - стойки силовые укороченные;
3 - стойки силовые удлиненные;
4 - сборно-разборная втулка;
5 и 5' - привода (механизмы) вращения корпуса 1;
6 и 6' - подшипниковые опоры;
7 и 7' - винт первый и винт второй соответственно;
8 и 8' - валы винтов 7 и 7' соответственно;
9 и 9' - механизмы изменения шага винтов 7 и 7' соответственно;
10 и 10' - подшипники на концах лопастей винтов 7 и 7' соответственно;
11 и 11' - прочные бандажные кольца винтов 6 и 6' соответственно;
12 и 12'- магниты электродвигателей винтов 6 и 6' соответственно;
13 и 13'- катушки статоров электродвигателей винтов 6 и 6';
14 и 14' - кабели сдвоенные электрические силовые;
15 - кабель электрический управляющий общий сдвоенный;
16 и 16' - кабели электрические управляющие вспомогательные;
17 - защитная решетка винтов 7.
Заявленная винтовая биротативная электрическая двигательная установка содержит корпус 1, внутренний профилированный проточный тракт которого выполнен на выходе сужающимся, в виде конфузора. Внутри корпуса 1 установлена жестко по оси симметрии на коротких силовых стойках 2, и на удлиненных силовых стойках 3, выполненных в виде прочных полых профилированных труб, сборно-разборная втулка 4, при этом короткие силовые стойки жестко соединены с корпусом сборно-разборной втулки 4 и с внутренней стенкой корпуса 1, а удлиненные силовые стойки 3 жестко соединены с корпусом сборно-разборной втулки 4 и с корпусом 1 так, что проходят насквозь через стенку корпуса 1 наружу, а их наружные концы соединены с приводами 5 и 5', обеспечивающими плоское вращение корпуса 1 на удлиненных силовых стойках 3 на 360 градусов. Силовые стойки 2 и 3 имеют профиль, обеспечивающий наименьшее аэродинамическое или гидравлическое сопротивление. Внутри втулки 4 закреплены подвижно, с помощью подшипниковых опор 6 и 6' соответственно, первый винт 7 на своем валу 8, и второй винт 7' на своем валу 8'. На концах валов 8 и 8' установлены соответственно механизмы 9 и 9' (детально не показаны), обеспечивающие изменение (регулирование) шага винтов 7 и 7', концы лопастей которых соединены подвижно, с помощью радиально-упорных подшипников 10 и 10' соответственно с бандажными кольцами 11 и 11'. На внешней поверхности бандажных колец 11 и 11' закреплены жестко и прочно постоянные магниты 12 и 12' (например, неодимовые). Бандажные кольца 11 и 11' вместе с магнитами 12 и 12' являются роторами электродвигателей винтов 7 и 7' соответственно, а статорами этих электродвигателей являются катушки 13 и 13' с обмотками, закрепленные прочно, жестко и коаксиально вокруг магнитов 12 и 12' на внутренней стенке корпуса 1. Электрический силовой ток на обмотки катушек 13 и 13' подается от системы управления работой двигательной установки (не показана) по сдвоенным электрическим силовым кабелям 14 и 14' соответственно. Управляющий электрический ток на механизмы 9 и 9' изменения (регулирования) шага винтов 7 и 7' подается сначала по общему сдвоенному электрическому управляющему кабелю 15, проходящему в полость втулки 4 через полость удлиненной силовой стойки 3, и затем по вспомогательным управляющим электрическим кабелям 16 и 16' соответственно. Вход во внутренний проточный тракт корпуса 1 закрыт легкой и прочной защитной решеткой 17.
Аналогичным образом устроена представленная на чертеже Фиг. 5 и на фото Фиг. 10-12 заявленная винтовая биротативная электрическая двигательная установка с расположением лопастей первого и второго винтов под углами флоп.1 и флоп.2 относительно их валов.
Из предварительных результатов проводимой в настоящее время научно-исследовательской и опытно-конструкторской работы - НИОКР, шифр «Винт» (еще не завершена и не опубликована), направленной на поиск путей повышения эффективности работы воздушных винтов следует, что рабочие характеристики винтов, выполненных с лопастями, расположенными под углом к оси их вращения (ϕлоп.1 и ϕлоп.2 варьируются в диапазоне от 85° до 45°), при всех равных условиях превосходят рабочие характеристики винтов, лопасти которых расположены в плоскости, нормальной к валу  Преимущество винтов, выполненных с лопастями, расположенными под углом к оси их вращения выявлено по значению пропускной способности рабочего тела (например, воздуха), и, как следствие, по мощности и эффективности их работы (по КПД), и энергетическому качеству. Для винтов, выполненных с лопастями, имеющими угол наклона относительно их валов, был обнаружен и другой положительный эффект, связанный с уменьшением шумности их работы.
Преимущество винтов, выполненных с лопастями, расположенными под углом к оси их вращения выявлено по значению пропускной способности рабочего тела (например, воздуха), и, как следствие, по мощности и эффективности их работы (по КПД), и энергетическому качеству. Для винтов, выполненных с лопастями, имеющими угол наклона относительно их валов, был обнаружен и другой положительный эффект, связанный с уменьшением шумности их работы.
Функционирование заявленной винтовой биротативной электрической двигательной установки осуществляется следующим образом.
Система управления двигательной установки (не показана) подает через электрические силовые кабели 14 и 14' электрический ток соответственно на обмотки катушек 13 и 13' статоров электродвигателей винтов 7 и 7'. Взаимодействие магнитных полей роторов, состоящих из бандажных колец 11 и 11' с магнитами 12 и 12' соответственно, и статоров, состоящих из обмоток катушек 13 и 13', создает на валах 8 и 8' крутящие моменты, приводящие винты 7 и 7' во вращение в противоположных направлениях с заданной скоростью. При этом поток рабочего тела (например, воздуха), поступающий с ускорением на вход проточного тракта корпуса 1 попадает на винты 7 и 7', где он сжимается с повышением давления, температуры и скорости движения в проточном тракте. Так как скорость потока рабочего тала (например, воздуха) за вторым винтом по значению числа М (числа Маха) не превышает величины 1.0, то за счет сужения проточного тракта на выходе из корпуса 1 этот поток рабочего тела ускоряется дополнительно, что приводит к увеличению импульса реактивной силы двигательной установки, то есть к увеличению ее тяги и эффективности работы по КПД. Изменение режима работы винтов 7 и 7' (по мощности и скорости вращения) регулируется изменением величины электрического тока, подаваемого через кабели 14 и 14' на обмотки катушек 13 и 13' соответственно, а изменение шага винтов регулируется подачей управляющего импульса электрического тока на механизмы 9 и 9' через общий сдвоенный электрический управляющий кабель 15, а затем через вспомогательные электрические управляющие кабели 16 и 16'. Изменение вектора тяги двигательной установки на заданный угол осуществляется через подачу определенного управляющего сигнала на приводы (механизмы) 4 и 4', обеспечивающие поворот удлиненных стоек 3 относительно их оси симметрии на заданный угол. Изменение шага винтов 7 и 7' осуществляется поворотом их лопастей в подшипниковых опорах 10 и 10' с помощью механизмов 9 и 9'.
Использование в винтовой биротативной электрической двигательной установке винтов 7 и 7' с лопастями, установленными к их валам 8 и 8' под некоторыми углами ( см., чертеж Фиг. 5 и фото Фиг. 10-12) позволяет, при сохранении диаметра корпуса 1 и диаметра бандажных колец 11 и 11' этих винтов, значительно повысить пропускную способность винтов 7 и 7', и степень сжатия рабочего тела (например, воздуха, с повышением его давления, температуры и скорости), и тем самым дополнительно повысить мощность и эффективность работы двигательной установки по КПД, а также повысить ее энергетическое качество. При этом угол наклона лопастей
см., чертеж Фиг. 5 и фото Фиг. 10-12) позволяет, при сохранении диаметра корпуса 1 и диаметра бандажных колец 11 и 11' этих винтов, значительно повысить пропускную способность винтов 7 и 7', и степень сжатия рабочего тела (например, воздуха, с повышением его давления, температуры и скорости), и тем самым дополнительно повысить мощность и эффективность работы двигательной установки по КПД, а также повысить ее энергетическое качество. При этом угол наклона лопастей  ее первого и второго винтов может варьироваться в диапазоне от 85° до 45°. Так, например, для винтовой биротативной электрической двигательной установки с диаметром описанной окружности винтов 7 и 7' порядка 1 метра, и частотой их вращения 5800 об/мин, оптимальный угол наклона лопастей ϕлоп. ее первого и второго винтов составляет порядка 57.9°, т.е.
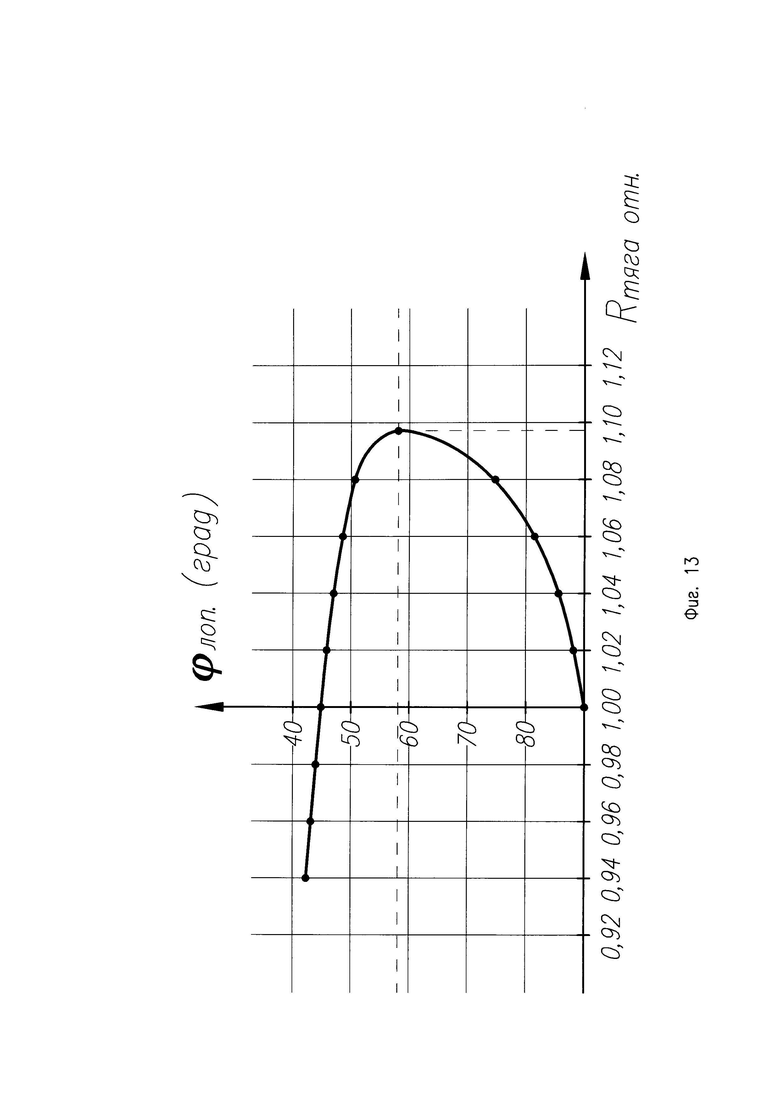
ее первого и второго винтов может варьироваться в диапазоне от 85° до 45°. Так, например, для винтовой биротативной электрической двигательной установки с диаметром описанной окружности винтов 7 и 7' порядка 1 метра, и частотой их вращения 5800 об/мин, оптимальный угол наклона лопастей ϕлоп. ее первого и второго винтов составляет порядка 57.9°, т.е.  При неизменном уровне потребляемой ее электродвигателями электрической энергии, суммарная тяга ее винтов возрастает примерно на 9,8%. На графике Фиг. 13 показано относительное изменение суммарной тяги винтов этой двигательной установки
При неизменном уровне потребляемой ее электродвигателями электрической энергии, суммарная тяга ее винтов возрастает примерно на 9,8%. На графике Фиг. 13 показано относительное изменение суммарной тяги винтов этой двигательной установки  в зависимости от значения угла наклона
в зависимости от значения угла наклона  лопастей ее первого и второго винтов. Для двигательной установки с аналогичными винтами, имеющими другие геометрические параметры и режимы работы, ϕлоп.1 и ϕлоп..2 и суммарное увеличение ее тяги будут иметь другие значения.
лопастей ее первого и второго винтов. Для двигательной установки с аналогичными винтами, имеющими другие геометрические параметры и режимы работы, ϕлоп.1 и ϕлоп..2 и суммарное увеличение ее тяги будут иметь другие значения.
Таким образом, выполнение корпуса 1 на выходе из его внутреннего проточного тракта сужающимся, в виде конфузора, а также выполнение винтов с лопастями, установленными под углом ϕлоп.1 и ϕлоп..2 к валам этих винтов, позволяет существенно повысить мощность и эффективность работы (по КПД), а также повысить энергетическое качество заявленной винтовой биротативной электрической двигательной установки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Роторный биротативный газотурбинный двигатель | 2019 |
|
RU2702317C1 |
| Архитектура "Топос" электрического привода воздушного винта | 2019 |
|
RU2786265C2 |
| ТЕПЛОПАРОГЕНЕРАТОР ВИХРЕВОГО ТИПА | 2008 |
|
RU2378585C1 |
| ВИНТОВЕНТИЛЯТОРНЫЙ АВИАЦИОННЫЙ ДВИГАТЕЛЬ | 2007 |
|
RU2358119C1 |
| ТУРБОВИНТОВОЙ ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ | 2007 |
|
RU2359131C1 |
| Роторный детонационный газотурбинный двигатель и способ детонационного горения в нём | 2020 |
|
RU2745975C1 |
| ПРОПУЛЬСИВНАЯ СИСТЕМА СОЛОВЬЕВА | 2006 |
|
RU2326021C2 |
| ДВИГАТЕЛЬНО-ДВИЖИТЕЛЬНЫЙ МОДУЛЬ КОЛЬЦЕВОЙ КОНСТРУКЦИИ | 2017 |
|
RU2670341C1 |
| СУДОВАЯ ДВИЖИТЕЛЬНО-ДВИГАТЕЛЬНАЯ УСТАНОВКА ТИПА "ПОВОРОТНАЯ КОЛОНКА" | 1997 |
|
RU2119875C1 |
| Экраноплан с двигательной установкой, выполненной по схеме мультикоптера | 2023 |
|
RU2833275C1 |
Изобретение относится к области винтовых движительных установок со встроенными электродвигателями. Винтовая биротативная электрическая двигательная установка содержит корпус с внутренним профилированным проточным трактом, в котором на оси симметрии установлена втулка, соединенная жестко с корпусом с помощью силовых стоек. Внутри втулки установлены подвижно с помощью подшипниковых опор валы первого и второго винтов, вращающихся в противоположные стороны. Концы лопастей каждого винта соединены со своим бандажным кольцом через радиально-упорные подшипники с возможностью поворота лопастей, выполненным с магнитами на его внешней стороне, и являющимся ротором электродвигателя. Вокруг каждого кольца расположены коаксиально обмотки статоров электродвигателей, жестко закрепленные на внутренней стенке корпуса. Корпус выполнен к выходу из его внутреннего профилированного проточного тракта сужающимся в виде конфузора. Две силовые стойки расположены противоположно и диаметрально и выполнены удлиненными так, что проходят через корпус насквозь, на его внешнюю сторону, и соединены с приводами. Внутри удлиненных силовых стоек расположены сдвоенные силовые электрические кабели питания статоров электродвигателей. Обеспечивается повышение эффективности работы установки. 2 з.п. ф-лы, 13 ил.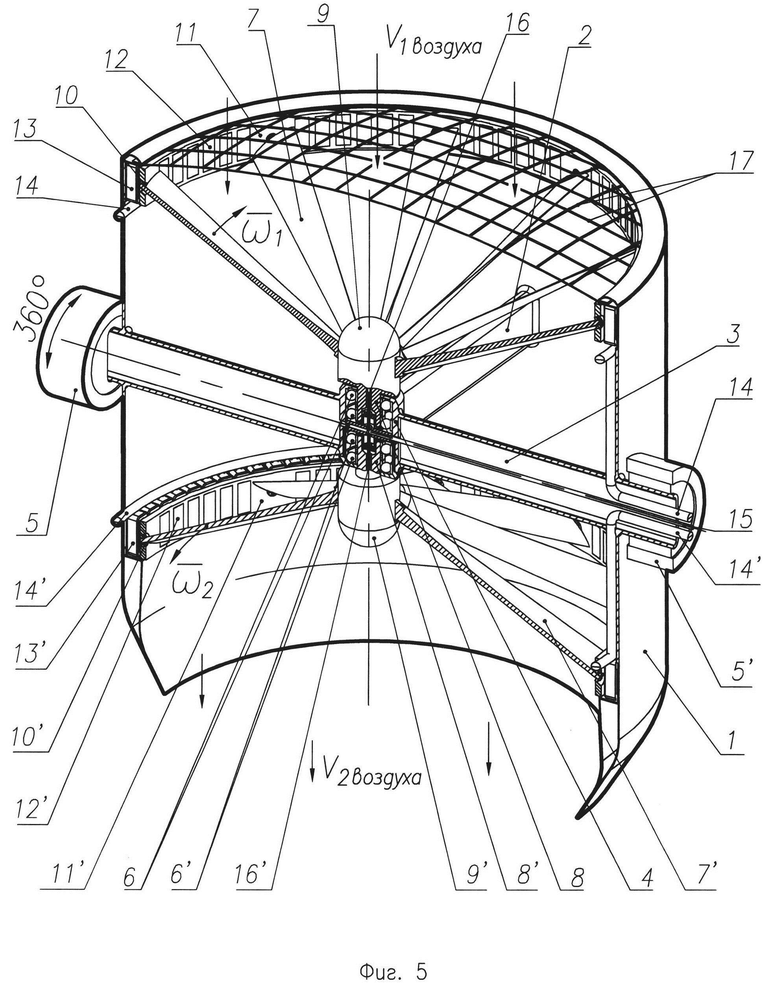
1. Винтовая биротативная электрическая двигательная установка, содержащая корпус с внутренним профилированным проточным трактом, в котором на оси симметрии установлена втулка, соединенная жестко с корпусом с помощью силовых стоек, внутри которой установлены подвижно с помощью подшипниковых опор валы первого и второго винтов, вращающихся в противоположные стороны, а концы лопастей каждого винта соединены со своим бандажным кольцом, выполненным с магнитами на его внешней стороне и являющимся ротором электродвигателя, а вокруг каждого кольца расположены коаксиально обмотки статоров электродвигателей, жестко закрепленные на внутренней стенке корпуса, отличающаяся тем, что корпус выполнен к выходу из его внутреннего профилированного проточного тракта сужающимся в виде конфузора, две силовые стойки расположены противоположно и диаметрально и выполнены удлиненными так, что проходят через корпус насквозь, на его внешнюю сторону, и соединены с приводами, а концы лопастей каждого винта соединены со своим бандажным кольцом подвижно через радиально-упорные подшипники, с возможностью поворота лопастей относительно их оси симметрии с помощью механизмов регулирования шага винтов, расположенных соответственно на обоих концах втулки, при этом внутри удлиненных силовых стоек расположены сдвоенные силовые электрические кабели питания статоров электродвигателей, а также электрический кабель управления работой механизмов регулирования шага винтов.
2. Винтовая биротативная электрическая двигательная установка по п. 1, отличающаяся тем, что лопасти первого и второго винтов установлены в плоскости, расположенной под углом 90 градусов к их валам.
3. Винтовая биротативная электрическая двигательная установка по п. 1, отличающаяся тем, что лопасти первого и второго винтов установлены под углами относительно их валов, при этом углы наклона лопастей варьируются от 85 градусов до 45 градусов.
| WO 2005072233 A2, 11.08.2005 | |||
| Архитектура "Топос" электрического привода воздушного винта | 2019 |
|
RU2786265C2 |
| СУДОВАЯ СИСТЕМА ЭЛЕКТРОДВИЖЕНИЯ С ДВУХВИНТОВЫМ ДВИГАТЕЛЬНО-ДВИЖИТЕЛЬНЫМ МОДУЛЕМ С ДВИГАТЕЛЯМИ КОЛЬЦЕВОЙ КОНСТРУКЦИИ | 2012 |
|
RU2522733C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2020 |
|
RU2726343C1 |
| CN 102756625 A, 31.10.2012 | |||
| ПРОПУЛЬСИВНАЯ СИСТЕМА С ЭЛЕКТРОДВИГАТЕЛЯМИ | 2006 |
|
RU2327596C2 |

