Область техники
Настоящее изобретение относится к измерительной технике и может быть использовано при пассивной компенсации смещения нуля сенсора давления с мостовой измерительной цепью по аддитивной температурной погрешности, не затрагивая чувствительный элемент сенсора.
Уровень техники
Известен способ настройки тензорезисторных датчиков с мостовой измерительной цепью по аддитивной температурной погрешности, заключающийся в предварительной балансировке мостовой цепи в пределах ±0,5% номинального выходного сигнала, определении температурного коэффициента сопротивления (ТКС) всех плеч сбалансированной мостовой цепи и установке в определенное плечо, последовательно с рабочим тензорезистором, термозависимого компенсационного резистора Rβ расчетной величины с последующей балансировкой мостовой схемы без изменения ТКС балансируемого плеча (RU 2265802 С1, опубл. 10.12.2005).
Проблемой аналога является низкая технологичность такого способа по причине того, что чтобы настроить сенсор давления описанным способом для определения значений компенсационных элементов необходимо знать целый ряд физических параметров элементов, входящих в состав датчика. Например, для определения ТКС тензорезистора, установленного на упругий элемент (УЭ), необходимо знать такие физические параметры, как: ТКС материала тензорезистора αri, температурные коэффициенты линейного расширения тензорезистора αn и УЭ - αэ; коэффициент тензочувствительности Ко и температурный коэффициент тензочувствительности αк тензорезисторов, установленных на упругом элементе; температурный коэффициент модуля упругости ηэ материала УЭ; температурные коэффициенты сопротивления компенсационного элемента αβ, и др. Как правило, данную информацию можно получить из сертификатов на применяемые материалы, однако существующие технологические разбросы при изготовлении этих материалов не позволяют использовать данную информацию, в силу значительных разбросов, получаемых при определении значений компенсационных элементов. Кроме того, если датчик выполнен с применением микроэлектронной технологии (металлопленочные или полупроводниковые диффузионные датчики), данная информация отсутствует вообще. Поэтому, чтобы использовать аналитические выражения по аналогу, необходимо осуществить экспериментальное определение требуемых параметров элементов, входящих в состав датчика.
Однако экспериментальное определение физических параметров компенсационных элементов и элементов измерительной схемы датчика представляет определенную сложность по той причине, что
- определение всех физических параметров, как элементов измерительной схемы, так и компенсационных элементов, необходимо проводить в собранном датчике, так как существующие перепады температур и температурных деформаций по телу датчика могут вызвать недопустимо большие погрешности при определении компенсационных элементов;
- определение всех физических параметров отдельных элементов требует, как правило, нарушение электрических связей в собранном датчике, что может привести к значительному ухудшению метрологических характеристик (в особенности это касается датчиков, выполненных с применением микроэлектронной технологии, так как эти связи заложены на самых ранних этапах формирования измерительной схемы).
Кроме того, прямые методы измерения этих параметров, кроме большой трудоемкости, не обеспечивают требуемую точность.
Наиболее близким техническим решением является косвенный способ настройки тензорезисторных датчиков с мостовой измерительной цепью по аддитивной температурной погрешности, при осуществлении которого производят предварительную сборку датчика с учетом герметизации внутренней полости для датчиков относительного давления. Устанавливают его в технологический штуцер с номинальным значением момента затяжки. Производят в нормальных температурных условиях предварительную балансировку в пределах ±0,5% номинального выходного сигнала. Определяют начальный выходной сигнал датчика при температуре эксплуатации датчика. По знаку изменения начального выходного сигнала при изменении температуры определяют плечо включения термозависимого компенсационного резистора. Устанавливают технологический термозависимый компенсационный резистор Rβт c максимально возможным температурным коэффициентом сопротивления (ТКС) на упругом элементе в зоне установки рабочих тензорезисторов. Его номинал равен 2-2,5% от номинала рабочего тензорезистора, к которому он подключается. Производят балансировку мостовой цепи путем включения последовательно с рабочим тензорезистором термонезависимого балансировочного резистора Rбт, который устанавливают вне зоны действия температурного поля. Его ТКС не более ±0,1% ТКС рабочих тензорезисторов. Определяют начальный выходной сигнал датчика при температуре эксплуатации и рассчитывают номинал рабочего термозависимого компенсационного резистора Rβ. Производят установку рабочего термозависимого компенсационного резистора путем частичного задействования технологического термозависимого компенсационного резистора с расчетным номиналом Rβ в то же плечо мостовой цепи, в котором был установлен технологический термозависимый компенсационный резистор. Производят окончательную балансировку мостовой цепи термонезависимым резистором путем замены термонезависимого балансировочного резистора Rбт на резистор Rб, необходимый для балансировки после установки рабочего термозависимого компенсационного резистора (RU 2307998 C1, опубл. 10.10.2007г).
Проблемой наиболее близкого технического решения является низкая технологичность, определяющаяся сложностью описанного способа, его низкой точностью полученных результатов по той причине, что термонезависимый балансировочный резистоа Rбт устанавливается в датчике вне зоны действия температурного поля измеряемого параметра (например, во вторичном преобразователе). Из этого следует, что, должна применяться большая по габаритам установка, чтобы датчик работал в зоне температурного воздействия, а его компенсационный резистор находился где-то в отдельном устройстве, на которое не будет воздействовать температура. В реальных условиях эксплуатации в принципе не понятно как такое подключение между датчиком и компенсационным резистором может быть реализовано, а если это все же реализовать, то какого размера будет данное устройство. При условии реализации дальнего нахождения компенсационного резистора и датчика давления, следует учитывать, что на них будут оказываться другие воздействия и точность такого прибора будет низкой.
Раскрытие сущности изобретения
Технической проблемой решаемой заявляемым изобретением, является устранение недостатков аналогов.
Задачей заявляемого изобретения является создание более технологичного способа пассивной температурной компенсации смещения нуля сенсора давления, более простого в исполнении и точного на выходе.
Технический результат заявляемого изобретения заключается в создании более технологичного способа пассивной температурной компенсации смещения нуля сенсора давления, более простого в исполнении и точного на выходе.
Поставленная задача согласно одному аспекту изобретения решается тем, что способ пассивной температурной компенсации смещения нуля сенсора давления включает определение по меньшей мере двух значений изменения напряжения смещения нуля ΔU сенсора давления, определенных разницей между напряжениями смещения нуля при нормальной температуре и при температуре эксплуатации, определение плеч моста для установки термонезависимых компенсационных резисторов, которые подставляют в мостовую схему сенсора давления одновременно парами, выбранными из группы: Rкомп1 и Rкомп3, Rкомп1 и Rкомп4, Rкомп2 и Rкомп3, Rкомп2 и Rкомп4, причем подстановку термонезависимых компенсационных резисторов Rкомп1 и Rкомп2 осуществляют параллельно резисторам R1 и R2 моста сенсора давления соответственно, а подстановку термонезависимых компенсационных резисторов Rкомп3 и Rкомп4 осуществляют последовательно резисторам R3 и R4 моста сенсора давления соответственно, после чего выбранную пару термонезависимых компенсационных резисторов монтируют на компенсационную плату, которую в свою очередь электрически подключают к мостовой схеме сенсора давления.
В другом предпочтительном варианте изобретения термонезависимые компенсационные резисторы выбирают с температурным коэффициентом не более 25 ppm.
В другом предпочтительном варианте изобретения термонезависимые компенсационные резисторы подставляют по ряду не ниже Е48.
В другом предпочтительном варианте изобретения сенсор давления выбирают с температурой эксплуатации от -40 до 125 ºС.
Согласно другому аспекту изобретения поставленная задача решается тем, что способ пассивной температурной компенсации смещения нуля сенсора давления, осуществлен по одному аспекту настоящего изобретения, при этом значение термонезависимого компенсационного резистора Rкомп1 или Rкомп2 выбирают из условия, что оно не менее, чем в 1,7*102 раза больше значения резистора R1 или R2 при нормальной температуре моста сенсора давления соответственно, а значение термонезависимого компенсационного резистора Rкомп3 или Rкомп4 выбирают из условия, что оно не менее, чем в 2,2*105 раз меньше значений Rкомп1 или Rкомп2 соответственно.
Осуществление изобретения
Способ пассивной температурной компенсации смещения нуля сенсора давления по одному аспекту изобретения включает определение по меньшей мере двух значений изменения напряжения смещения нуля ΔU сенсора давления, определенных разницей между напряжениями смещения нуля при нормальной температуре и при температуре эксплуатации, определение плеч моста для установки термонезависимых компенсационных резисторов, которые подставляют в мостовую схему сенсора давления одновременно парами, выбранными из группы: Rкомп1 и Rкомп3, Rкомп1 и Rкомп4, Rкомп2 и Rкомп3, Rкомп2 и Rкомп4, причем подстановку термонезависимых компенсационных резисторов Rкомп1 и Rкомп2 осуществляют параллельно резисторам R1 и R2 моста сенсора давления соответственно, а подстановку термонезависимых компенсационных резисторов Rкомп3 и Rкомп4 осуществляют последовательно резисторам R3 и R4 моста сенсора давления соответственно, после чего выбранную пару термонезависимых компенсационных резисторов монтируют на компенсационную плату, которую в свою очередь электрически подключают к мостовой схеме сенсора давления.
Изменение напряжения смещения нуля ΔU определяют по формуле:
ΔU=4,5*Ut-Uti,
где Ut – значение выходного сигнала напряжения сенсора давления при нормальной температуре t;
Uti - значение выходного сигнала напряжения сенсора давления при температуре эксплуатации ti.
Значения Ut и Uti мостовой схемы сенсора давления находят исходя из стандартной формулы расчета по значением сопротивлений резисторов мостовой схемы давления.
Нормальная температура t, как правило, комнатная температура, при которой осуществляют настройку датчика. Она может находиться в диапазоне 10-30 °С в зависимости от времени года.
Температура эксплуатации ti у различных сенсоров давления может разниться. В одном из предпочтительных вариантов осуществления температура эксплуатации ti сенсора давления может находиться в диапазоне от минус 40 до 125 ºС, в другом варианте осуществления может входить в указанный диапазон, а также быть больше него или частично пересекаться с ним.
Полные формулы расчета ΔU мостовой схемы сенсора давления с термонезависимый компенсационными резисторами приведены ниже.
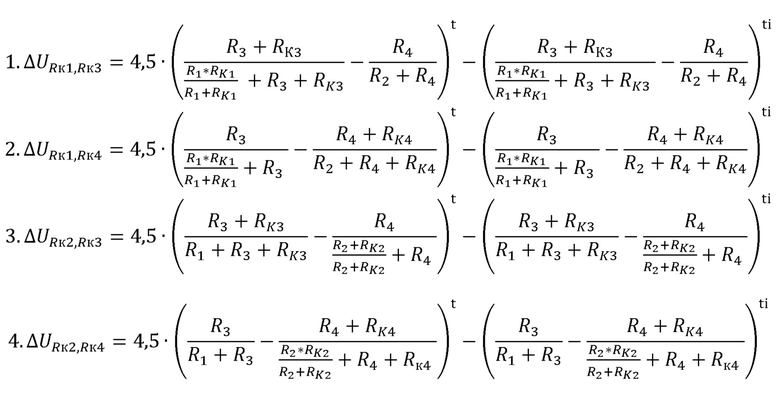
где: t – значения напряжения Ut при нормальной температуре t;
ti – значения напряжения Uti при температуре эксплуатации ti;
R1, R2, R3, R4 – резисторы мостовой схемы сенсора давления из плеч 1, 2, 3 и 4 соответственно.
Для определения значений напряжений смещения нуля Ut и Uti определяют значения резисторов R1, R2, R3, R4 мостовой схемы сенсора давления путем их измерения на сенсоре давления при нормальной температуре t и при температуре эксплуатации ti. На основе полученных значений R1, R2, R3, R4 мостовой схемы сенсора давления определяют напряжение Ut при нормальной температуре t и напряжения Uti при температуре эксплуатации ti, по которым далее определяют изменения напряжения смещения нуля ΔU.
Нахождение по меньшей мере двух значений изменений напряжения смещения нуля ΔU обуславливается повышением точности при температурной компенсации сенсора давления, ещё более предпочтительно находят три-пять значений ΔU. При определении значений менее двух изменений напряжения смещения нуля ΔU повышена вероятность снижения точности при компенсации смещения нуля сенсора давления. Для нахождения значений изменений напряжения смещения нуля ΔU применяются формулы, в связи с чем нахождение большего количества значений не усложнит способ, но положительно скажется на его точности, чем повышается технологичность заявленного способа. Следует отметить, что формулы могут быть изначально введены в программные средства, например, таблицу Excel или быть установлены в компьютерной программе, что сильно сокращает время на реализацию заявленного способа.
Далее определяют плечи моста 1 или 2 и 3 или 4 для установки термонезависимых компенсационных резисторов, в которые устанавливают термонезависимые компенсационные резисторы выбранными из группы: Rкомп1 и Rкомп3, Rкомп1 и Rкомп4, Rкомп2 и Rкомп3, Rкомп2 и Rкомп4, причем подстановку термонезависимых компенсационных резисторов Rкомп1 и Rкомп2 осуществляют параллельно резисторам R1 и R2 моста сенсора давления соответственно, а подстановку термонезависимых компенсационных резисторов Rкомп3 и Rкомп4 осуществляют последовательно резисторам R3 и R4 моста сенсора давления соответственно.
Выбор установки пары термонезависимых компенсационных резисторов описанным выше образом определен исходя из точности полученных результатов по пассивной температурной компенсации смещения нуля сенсора давления, так как именно такая установка позволяет добиться получения наименьшего значения изменения напряжения смещения нуля ΔU при осуществлении способа, при этом выбор из определенного количества групп пар термонезависимых компенсационных резисторов упрощает заявленный способ, что позволяет обеспечить заявленному способу повышенную технологичность.
Плечи моста 3 или 4 для установки термонезависимых компенсационных резисторов определяют следующим образом. Если рассчитанное напряжение смещения нуля без компенсационных резисторов > 0, то используют Rкопм4, если рассчитанное напряжение смещения нуля без компенсационных резисторов < 0, то используют Rкопм3. Плечи моста 1 или 2 для установки термонезависимых компенсационных резисторов могут быть определены, например, методом подстановки термонезависимых компенсационных резисторов в формулы расчета изменения напряжения смещения нуля ΔU, при подстановке в нужное плечо термонезависимого компенсационного резистора значение изменения напряжения смещения нуля ΔU смещается ближе к нулю, а при подстановке в не то плечо значение изменения напряжения смещения нуля ΔU смещается дальше от нуля.
Выбор в пользу термонезависимых компенсационных резисторов определен исходя из упрощения способа температурной компенсации смещения нуля сенсора давления и повышения его точности, так как термозависимые компенсационные резисторы подвержены влиянию температуры и для точности параметров требуется дополнительные сложные манипуляции или дополнительное оборудование, которое бы обеспечило нахождение упомянутых резисторов вне действия температурного воздействия для обеспечения точности результатов после произведения способа пассивной температурной компенсации смещения нуля сенсора давления. Избежание описанных сложностей с получением технического результата обеспечивает технологичность заявленному способу.
При этом, термонезависимые компенсационные резисторы подставляют в мостовую схему сенсора давления одновременно парами, что обуславливается повышением точности, простоты способа и определяется его технологичностью. При подстановке сначала одного термонезависимого компенсационного резистора, а затем второго, происходит воздействие их друг на друга, что приводит к ухудшению значения изменения напряжения смещения нуля ΔU, даже если выбор первого термонезависимого компенсационного резистора изначально обеспечивал наименьшее значение изменения напряжения смещения нуля ΔU, то при подстановке второго термонезависимого компенсационного резистора значение изменения напряжения смещения нуля ΔU может сильно ухудшиться, что приведет к необходимости снова подбирать значение первого термонезависимого компенсационного резистора, что в любом случае усложнит способ и отрицательно скажется на его точности. Одновременный подбор пары термонезависимых компенсационных резисторов позволяет сразу получить значение изменения напряжения смещения нуля ΔU с учетом влияния каждого термонезависимого компенсационного резистора друг на друга и на другие резисторы мостовой схемы сенсора давления, что позволяет осуществить более быстрый и точный подбор значений термонезависимых компенсационных резисторов, чем обеспечить повышение технологичности способа пассивной температурной компенсации смещения нуля сенсора давления.
Подбор термонезависимых компенсационных резисторов предпочтительно осуществляют подстановку в формулу изменения напряжения смещения нуля ΔU по ряду не ниже Е48, что объясняется дополнительной скоростью выбора значений пары компенсационных резисторов для достижения требуемых значений по точности.
Завершающим этапом способа является монтаж выбранной пары термонезависимых компенсационных резисторов на компенсационную плату, которую в свою очередь электрически подключают к мостовой схеме сенсора давления, например, посредством выводов сенсора. Монтаж выбранной пары термонезависимых компенсационных резисторов на компенсационную плату может осуществляется посредством жесткого скрепления, например, по средством пайки.
Сенсор давления содержит чувствительный элемент, например, из кремния, на котором и содержится мостовая схема сенсора давления, при этом чувствительный элемент загерметизирован. Установка термонезависимых компенсационных резисторов позволяет упростить способ, потому как не требует произведения сложных технологических операций по разборке, разгерметизации, установки на чувствительном элементе сенсора термонезависимых компенсационных резисторов, последующую герметизацию, что очень сложно реализовать, так как требуется специальное оборудование, квалифицированные работники, долгое и медленное выполнение работы для обеспечения точности, причем есть риск повредить чувствительный элемент сенсора, чем привести его в непригодность, при этом эффект по точности от такого способа установки не гарантирован по той причине, что герметизация сенсора осуществляется после установки термонезависимых компенсационных резисторов, как следствие это приводит к возникновению дополнительных погрешностей и снижению точности результатов.
Заявленный в способе последний этап установки термонезависимых компенсационных резисторов позволяет осуществить их монтаж без разгерметизации сенсора давления, что позволяет упростить способ пассивной температурной компенсации смещения нуля сенсора давления, уменьшив число технологических операций необходимых для его осуществления, при этом без проникновения внутрь сенсора, чем снизить риск повреждения чувствительного элемента датчика и обеспечить определенную точность значения изменения напряжения смещения нуля ΔU, так как определение значений термонезависимых компенсационных резисторов производилась при тех же факторах влияния.
Таким образом, описанным способом пассивной температурной компенсации смещения нуля сенсора давления по одному аспекту настоящего изобретения обеспечивается создание простого в реализации и простого способа, тем самым обеспечивая заявленное повышение технологичности.
Дополнительную точность при необходимости можно повысить за счет термонезависимых компенсационных резисторов, подобранных исходя из их температурного коэффициента. Предпочтительным является применение термонезависимых компенсационных резисторов с температурным коэффициентом не более 25 ppm.
Способ пассивной температурной компенсации смещения нуля сенсора давления согласно другому аспекту настоящего изобретения осуществляется по одному аспекту настоящего изобретения, при этом значение термонезависимого компенсационного резистора Rкомп1 или Rкомп2 выбирают из условия, что оно не менее, чем в 1,7*102 раза больше значения резистора R1 или R2 при нормальной температуре моста сенсора давления соответственно, а значение термонезависимого компенсационного резистора Rкомп3 или Rкомп4 выбирают из условия, что оно не менее, чем в 2,2*105 раз меньше значений Rкомп1 или Rкомп2 соответственно.
Значения компенсационных резисторов исходя из вышеописанных условий полученных в результате испытаний и позволяют дополнительно повысить технологичность заявленного способа пассивной температурной компенсации смещения нуля сенсора давления, так как обеспечивают простоту способу, сокращая время на подбор значений пары компенсационных резисторов, которые в свою очередь обеспечивает более быстрое достижение точности, то снижение значения изменения напряжения смещения нуля ΔU. Выход за любой диапазон из заявленных значения усложняет способ, так как приводит к увеличению времени на подбор значений термонезависимых компенсационных резисторов, обеспечивающих повышенную точность, то есть меньшее значение изменения напряжения смещения нуля ΔU.
Стремление к большей точности по способу, выраженной меньшим значением изменения напряжения смещения нуля ΔU обусловлена тем, что при меньшем значении напряжения смещения нуля ΔU сенсор давления меньше подвержен температурному воздействию и выдает результаты при разных температурах с меньшей погрешностью, в связи с чем данный показатель является важным для достижения технологичности способа пассивной температурной компенсации смещения нуля сенсора давления.
Описанный способ реализовывался на практике. Результаты проведенных испытаний представлены ниже.
Способ пассивной температурной компенсации смещения нуля сенсора давления согласно одному аспекту включал измерение значения резисторов R1, R2, R3, R4 мостовой схемы сенсора давления при нормальной температуре t=25 ºС и при температурах эксплуатации t-40= -40 ºС и t125= 125 ºС. Значения сопротивления резисторов мостовой схемы сенсора давления при нормальной температуре t=25 ºС, при температуре эксплуатации t-40= -40 ºС, и при температуре эксплуатации t125=125 ºС приведены в Таблице 1. По полученным данным было определено два значения изменения напряжения смещения нуля ΔU25, -40 = 4500*(Ut-Ut-40) и ΔU25, 125 =4500*(Ut-Ut125) в мВ.
После этого определили плечи моста для установки термонезависимых компенсационных резисторов, причем плечо 3 или 4, потому что напряжение смещения нуля без компенсационных резисторов было < 0 или > 0, а плечо 1 или 2 было определено путем подстановки компенсационного резистора в формулу расчета.
Таким образом для пассивной температурной компенсации смещения нуля сенсора давления была выбрана пара компенсационных резисторов которые подставляли в формулу для расчета выходного напряжения смещения нуля/изменения напряжения смещения нуля с учетом, что резисторы Rкомп1 или Rкомп2 установлены параллельно резистору R1 и R2 моста сенсора давления соответственно, а термонезависимый компенсационный резистор Rкомп3 или Rкомп4 подставляли в вышеописанную формулу с учетом, что он установлен последовательно резистору R3 и R4 моста сенсора давления соответственно. Выбранную пару термонезависимых компенсационных резисторов подставляли в формулу для расчета одновременно, при этом подбор значений упомянутых резисторов для достижения необходимого значения изменения напряжения смещения нуля ΔU производили по ряду не ниже Е48. В результате расчетов были выбраны значения пары термонезависимых компенсационных резисторов.
Далее выбранную пару термонезависимых компенсационных резисторов смонтировали на компенсационную плату (припаяли), которую в свою очередь электрически подключили к мостовой схеме сенсора давления, а именно компенсационную плату установили на выводы, идущие к чувствительному элементу сенсора, а саму компенсационную плату жестко закрепили внутри сенсора. Определение значений изменения напряжения смещения нуля ΔU, определенных разницей между напряжениями смещения нуля при нормальной температуре и при температуре эксплуатации после установки компенсационных резисторов в корпус сенсора давления показало во всех случаях снижение изменения напряжения смещения нуля ΔU.
Полученными значениями изменения напряжения смещения нуля ΔU полностью подтвержден выбор термонезависимых компенсационных резисторов, так как обеспечен более технологичный, а именно быстрый, простой и точный способ пассивной температурной компенсации смещения нуля сенсора давления без разгерметизации сенсора давления и выполнения сложных манипуляций по установке на его чувствительном элементе компенсационных резисторов, при этом получен очень хороший результат по точности, выраженный в снижении значением изменения напряжения смещения нуля ΔU.
Результаты проведенных испытаний приведены в Таблице 1, в которой сначала приведены исходные данные по значениям резисторов моста и значениям изменения смещения нуля ΔU, далее приведены подобранные компенсационные резисторы по одному аспекту настоящего изобретения, из которых видно, что все результаты данного способа являются положительными.
После этого в таблице 1 приведены значения компенсационных резисторов, в случае выбора компенсационных терморезисторов согласно другому аспекту настоящего изобретения и которые четко показывают, что при ряде ситуаций этот аспект сильно сокращает время для выбора, тем самым решая заявленную проблему и повышая технологичность. Так в примерах 3, 4, 6, 7-9, 12 можно было бы применить не первый аспект для осуществления способа, а выбрать компенсационные терморезисторы, применив значения другого аспекта настоящего изобретения:
- значение термонезависимого компенсационного резистора Rкомп1 или Rкомп2 выбирают из условия, что оно не менее, чем в 1,7*102 раза больше значения резистора R1 или R2 при нормальной температуре моста сенсора давления соответственно,
- значение термонезависимого компенсационного резистора Rкомп3 или Rкомп4 выбирают из условия, что оно не менее, чем в 2,2*105 раз меньше значений Rкомп1 или Rкомп2 соответственно.
Значения, полученные в результате выявленной зависимости, далее просматривались по ряду Е48 для дальнейшего выбора значений резисторов.
Таблица 1
параметр
R2= 3692
R3= 3683
R4= 3712
R2= 3691
R3= 3724
R4= 3744
R2= 3672
R3= 3681
R4= 3671
R2= 3700
R3= 3685
R4= 3680
R2= 3602
R3= 3680
R4= 3688
R2= 3701
R3= 3686
R4= 3683
R2= 3264
R3= 3258
R4= 3284
R2= 3255
R3= 3286
R4=3305
R2= 3277
R3= 3255
R4=3284
R2= 3261
R3= 3272
R4= 3255
R2= 3161
R3= 3273
R4=3236
R2= 3290
R3= 3256
R4=3256
R2= 4257
R3= 4247
R4=4277
R2= 4265
R3= 4301
R4=4324
R2= 4207
R3= 4210
R4= 4204
R2= 4194
R3= 4220
R4=4195
R2= 4095
R3= 4220
R4=4203
R2= 4195
R3= 4221
R4=4197
ΔU25, 125=
-0,10
ΔU25, 125=
-0,38
-0,69
ΔU25, 125=
0,60
-1,12
ΔU25, 125=
1,70
-0,45
ΔU25, 125=
0,6
0,91
ΔU25, 125=
1,45
1537
5181
634
785
1247
649
15
2,87
22
4
2,87
0,08
ΔU25, 125=
0,08
-0,09
ΔU25, 125=
- 0,09
-0,2
ΔU25, 125=
-0,02
0,39
ΔU25, 125=
0,13
0,07
ΔU25, 125=
0,05
-0,24
ΔU25, 125=
0,4
627,04
627,15
630,360
629,0
612,03
629,0
2,85
2,85
2,86
2,85
2,78
2,86
Продолжение Таблицы 1
параметр
R2= 3682
R3= 3674
R4= 3685
R2= 3780
R3= 3762
R4= 3775
R2= 3521
R3= 3535
R4= 3536
R2= 3750
R3= 3738
R4= 3745
R2= 3781
R3= 3789
R4= 3799
R2= 3707
R3= 3690
R4= 3680
R2= 3246
R3= 3244
R4=3253
R2= 3332
R3= 3321
R4=3332
R2= 3231
R3= 3217
R4=3211
R2= 3309
R3= 3300
R4=3309
R2= 3334
R3= 3344
R4=3354
R2= 3300
R3= 3390
R4=3307
R2= 4254
R3= 4240
R4=4254
R2= 4371
R3= 4344
R4=4362
R2= 4025
R3= 4042
R4=4037
R2= 4334
R3= 4314
R4=4325
R2= 4365
R3= 4370
R4=4385
R2= 4244
R3= 4217
R4=4200
1,1
ΔU25, 125=
-0,75
0,43
ΔU25, 125=
-0,2
12,81
ΔU25, 125=
-1,75
0,6
ΔU25, 125=
-0,59
0,32
ΔU25, 125=
-0,20
13,75
ΔU25, 125=
-0,63
698
2 860
604
705
1 247
634
3
2,92
2,74
5
5
2,87
0,29
ΔU25, 125=
0,28
0,13
ΔU25, 125=
0,13
0,08
ΔU25, 125=
-0,71
0,13
ΔU25, 125=
0,13
0,13
ΔU25, 125=
0,12
-0,61
ΔU25, 125=
0,2
620,49
639,31
598,57
632,025
638,17
630,19
2,82
2,9
2,72
2,87
2,9
2,86
Следует понимать, что в таблице 1 значения резисторов при различных температурах округлены до целых значений, при этом расчеты производились с полными их значениями, включающими и знаки после запятой.
Из приведенной таблицы выше следует, что применение способа пассивной температурной компенсации смещения нуля сенсора давления согласно одному аспекту настоящего изобретения позволяет точечно подходить к компенсации для получения более точных значений, а по другому аспекту настоящего изобретения дополнительно позволяет быстрее осуществить выбор значений термонезависимых компенсационных резисторов, чем дополнительно повышается технологичность заявленного способа.
Таким образом, заваленным изобретение обеспечивается более простой, быстрый и точный способ пассивной температурной компенсации смещения нуля сенсора давления.
Изобретение относится к измерительной технике и может быть использовано при пассивной компенсации смещения нуля сенсора давления с мостовой измерительной цепью по аддитивной температурной погрешности, не затрагивая чувствительный элемент сенсора. Предложен способ пассивной температурной компенсации смещения нуля сенсора давления, который включает определение по меньшей мере двух значений изменения напряжения смещения нуля ΔU сенсора давления, определенных разницей между напряжениями смещения нуля при нормальной температуре и при температуре эксплуатации, определение плеч моста для установки термонезависимых компенсационных резисторов, которые подставляют в мостовую схему сенсора давления одновременно парами, выбранными из группы: Rкомп1 и Rкомп3, Rкомп1 и Rкомп4, Rкомп2 и Rкомп3, Rкомп2 и Rкомп4. Причем подстановку термонезависимых компенсационных резисторов Rкомп1 и Rкомп2 осуществляют параллельно резисторам R1 и R2 моста сенсора давления соответственно, а подстановку термонезависимых компенсационных резисторов Rкомп3 и Rкомп4 осуществляют последовательно резисторам R3 и R4 моста сенсора давления соответственно, после чего выбранную пару термонезависимых компенсационных резисторов монтируют на компенсационную плату, которую в свою очередь электрически подключают к мостовой схеме сенсора давления. При этом значение термонезависимого компенсационного резистора Rкомп1 или Rкомп2 выбирают из условия, что оно не менее чем в 1,7⋅102 раза больше значения резистора R1 или R2 при нормальной температуре моста сенсора давления соответственно, а значение термонезависимого компенсационного резистора Rкомп3 или Rкомп4 выбирают из условия, что оно не менее чем в 2,2⋅105 раза меньше значения Rкомп1 или Rкомп2 соответственно. Технический результат - повышение технологичности способа пассивной температурной компенсации смещения нуля сенсора давления, более простого в исполнении и точного на выходе. 2 н. и 3 з.п. ф-лы, 1 табл.
1. Способ пассивной температурной компенсации смещения нуля сенсора давления, включающий определение по меньшей мере двух значений изменения напряжения смещения нуля ΔU сенсора давления, определенных разницей между напряжениями смещения нуля при нормальной температуре и при температуре эксплуатации, определение плеч моста для установки термонезависимых компенсационных резисторов, которые подставляют в мостовую схему сенсора давления одновременно парами, выбранными из группы: Rкомп1 и Rкомп3, Rкомп1 и Rкомп4, Rкомп2 и Rкомп3, Rкомп2 и Rкомп4, причем подстановку термонезависимых компенсационных резисторов Rкомп1 и Rкомп2 осуществляют параллельно резисторам R1 и R2 моста сенсора давления соответственно, а подстановку термонезависимых компенсационных резисторов Rкомп3 и Rкомп4 осуществляют последовательно резисторам R3 и R4 моста сенсора давления соответственно, после чего выбранную пару термонезависимых компенсационных резисторов монтируют на компенсационную плату, которую в свою очередь электрически подключают к мостовой схеме сенсора давления.
2. Способ пассивной температурной компенсации смещения нуля сенсора давления, включающий определение по меньшей мере двух значений изменения напряжения смещения нуля ΔU сенсора давления, определенных разницей между напряжениями смещения нуля при нормальной температуре и при температуре эксплуатации, определение плеч моста для установки термонезависимых компенсационных резисторов, которые подставляют в мостовую схему сенсора давления одновременно парами, выбранными из группы: Rкомп1 и Rкомп3, Rкомп1 и Rкомп4, Rкомп2 и Rкомп3, Rкомп2 и Rкомп4, причем подстановку термонезависимых компенсационных резисторов Rкомп1 и Rкомп2 осуществляют параллельно резисторам R1 и R2 моста сенсора давления соответственно, а подстановку термонезависимых компенсационных резисторов Rкомп3 и Rкомп4 осуществляют последовательно резисторам R3 и R4 моста сенсора давления соответственно, значение термонезависимого компенсационного резистора Rкомп1 или Rкомп2 выбирают из условия, что оно не менее чем в 1,7⋅102 раза больше значения резистора R1 или R2 при нормальной температуре моста сенсора давления соответственно, а значение термонезависимого компенсационного резистора Rкомп3 или Rкомп4 выбирают из условия, что оно не менее чем в 2,2⋅105 раза меньше значения Rкомп1 или Rкомп2 соответственно, после чего выбранную пару термонезависимых компенсационных резисторов монтируют на компенсационную плату, которую в свою очередь электрически подключают к мостовой схеме сенсора давления.
3. Способ по п. 1 или 2, отличающийся тем, что термонезависимые компенсационные резисторы выбирают с температурным коэффициентом не менее 25 ppm.
4. Способ по п. 1 или 2, отличающийся тем, что термонезависимые компенсационные резисторы подставляют по ряду не ниже Е48.
5. Способ по п. 1 или 2, отличающийся тем, что сенсор давления выбирают с температурой эксплуатации от -40 до 125 °С.
| КОСВЕННЫЙ СПОСОБ НАСТРОЙКИ ТЕНЗОРЕЗИСТОРНЫХ ДАТЧИКОВ С МОСТОВОЙ ИЗМЕРИТЕЛЬНОЙ ЦЕПЬЮ ПО АДДИТИВНОЙ ТЕМПЕРАТУРНОЙ ПОГРЕШНОСТИ | 2006 |
|
RU2307998C1 |
| СПОСОБ НАСТРОЙКИ ТЕНЗОРЕЗИСТОРНЫХ ДАТЧИКОВ С МОСТОВОЙ ИЗМЕРИТЕЛЬНОЙ ЦЕПЬЮ ПО АДДИТИВНОЙ ТЕМПЕРАТУРНОЙ ПОГРЕШНОСТИ | 2004 |
|
RU2265802C1 |
| СПОСОБ НАСТРОЙКИ ТЕНЗОРЕЗИСТОРНЫХ ДАТЧИКОВ С МОСТОВОЙ ИЗМЕРИТЕЛЬНОЙ ЦЕПЬЮ ПО ТЕМПЕРАТУРНОЙ ПОГРЕШНОСТИ | 2006 |
|
RU2300735C1 |
| СПОСОБ ТЕМПЕРАТУРНОЙ КОМПЕНСАЦИИ ТЕНЗОРЕЗИСТОРНЫХ ДАТЧИКОВ | 1984 |
|
RU2027142C1 |
| СПОСОБ ТЕРМОКОМПЕНСАЦИИ ТЕНЗОДАТЧИКОВ СОПРОТИВЛЕНИЯ | 0 |
|
SU311133A1 |
| US 4172389 A, 30.10.1979. | |||

