Изобретение относится к области авиационного двигателестроения и может быть использовано в электро-гидромеханических системах автоматического управления газотурбинными двигателями.
Известен способ регулирования авиационного турбореактивного двигателя является способ управления газотурбинным двигателем (RU 2007599), согласно которому регулирование подачи топлива осуществляют по сигналу разности заданной и измеренной частот вращения ротора, а управление направляющим аппаратом компрессора осуществляют по измеренной частоте вращения ротора газотурбинного двигателя, причем в процессе работы газотурбинного двигателя определяют передаточные функции по каналам воздействия направляющих аппаратов и расхода топлива на частоту вращения, находят их отношение и дополнительно осуществляют воздействие на подачу топлива в зависимости от угла установки направляющего аппарата с передаточной функцией, равной определенному отношению передаточной функции газотурбинного двигателя по каналу воздействия направляющего аппарата на частоту вращения к передаточной функции газотурбинного двигателя по каналу воздействия расхода топлива на частоту вращения.
Недостаток данного способа управления связан с тем, что в процессе работы динамическая ошибка регулирования положения направляющего аппарата на переходных режимах приводит к увеличению времени приемистости и сброса. Например, при отставании положения направляющего аппарата от заданной программы при приемистости, сигнал с блока коррекции расхода топлива снижает темп увеличения расхода топлива. В результате, чем больше динамическая ошибка по положению направляющих аппаратов, тем больше время приемистости.
Традиционный метод компенсации нелинейности гидромеханической части заключающийся во введении в цепь управления направляющими аппаратами компрессора пропорционально-интегрально-дифференцирующего регулятора, использующего линейный закон управления, недостаточен для компенсации нестационарной нелинейности электрогидромеханических приводов. Кроме того, с учетом не стационарности параметров нелинейности гидромеханической части, настройка параметров такого регулятора имеет сложную эвристическую неформальную схему и требует использования переменных коэффициентов передачи пропорционально-интегрально-дифференцирующего регулятора, зависящих от параметров и режимов работы двигателя. Настройкой такого регулятора приходится заниматься также при появлении колебательных процессов в контурах управления агрегатами управления топливом или в случае неудовлетворительной точности позиционирования направляющими аппаратами компрессора.
Наиболее близким, принятым за прототип является способ управления газотурбинным двигателем (RU 2730568), согласно которому управления положением направляющих аппаратов компрессора газотурбинного двигателя или топливного крана включает параметрическую идентификацию нелинейности электро-гидромеханического привода типа «зона нечувствительности» в реальном времени и компенсацию нелинейности, обеспечивающую асимптотическую устойчивость управления и астатическую точность позиционирования направляющих аппаратов компрессора с учетом найденных параметров нелинейности.
Недостаток данного способа управления связан с тем что в параметрах нелинейности типа "зона нечувствительности" предполагается постоянной и фиксированной значение ширины зоны нечувствительности, а в реальном времени производится только идентификация ее центра (значения равновесного тока). Практика же эксплуатации агрегатов показывает, что в контуре управления как направляющими аппаратами компрессора, так и топливным краном параметры нелинейности гидромеханической части не одинаковы для различных электро-гидромеханических приводов, а также меняются в процессе эксплуатации двигателя. При этом меняется как положение равновесного тока, так и ширина области нечувствительности.
Задачей изобретения является устранение указанного недостатка и повышение качества управления направляющими аппаратами компрессора и топливным краном.
Техническим результатом изобретения является разработка способа автоматической настройки центра зоны нечувствительности и ширины зоны нечувствительности для алгоритма компенсации нелинейности типа "зона нечувствительности", путем параметрической идентификации в реальном времени ширины зоны нечувствительности при управления положением направляющих аппаратов компрессора газотурбинного двигателя и топливным краном. При этом обеспечивается асимптотическая устойчивость и астатическую точность позиционирования направляющих аппаратов компрессора и топливного крана.
Технический результат достигается тем, что согласно изобретению, предложено устройство для реализации способа управления положением направляющих аппаратов компрессора либо топливного крана газотурбинного двигателя. Это устройство содержит блок параметрической идентификации всех параметров нелинейности электрогидромеханического привода типа «зона нечувствительности» в реальном времени и компенсацию нелинейности электро-гидромеханического привода, обеспечивающую асимптотическую устойчивость управления и астатическую точность позиционирования направляющих аппаратов компрессора или топливного крана с учетом найденных параметров нелинейности, а также содержит электро-гидромеханический привод и блок автоматического регулирования и контроля, включающий устройство управления электро-гидромеханическим приводом и компенсатор нелинейности, осуществляющий преобразование выходного сигнала устройства управления по формуле

где
Ip - управляющий сигнал с выхода устройства управления;
Iu - ток управления, подаваемый на вход электро-гидромеханического привода;
N - максимальное значение диапазона изменения тока управления;
 - центр зоны нечувствительности электро-гидромеханического привода, который идентифицируется в реальном времени по формуле
- центр зоны нечувствительности электро-гидромеханического привода, который идентифицируется в реальном времени по формуле

где Y0(t) - заданное положение исполнительного механизма;
Y(t) - фактическое положение исполнительного механизма;
dt1 - текущее значение d в момент времени t1;
e(t) - текущая ошибка по положению исполнительного механизма;
k, g - настроечные параметры, зависящие от режима работы двигателя и определяющие быстродействие блока идентификации.
 - ширина зоны нечувствительности, которая идентифицируется в реальном времени по формуле
- ширина зоны нечувствительности, которая идентифицируется в реальном времени по формуле
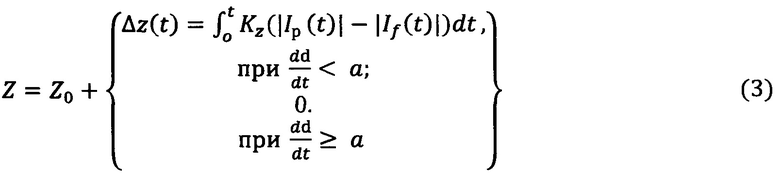
где
К0 - коэффициент передачи объекта управления;
Zo>0 - некоторое заданное начальное значение ширины зоны нечувствительности;
Kz, а - настроечные параметры;
t - текущее время.
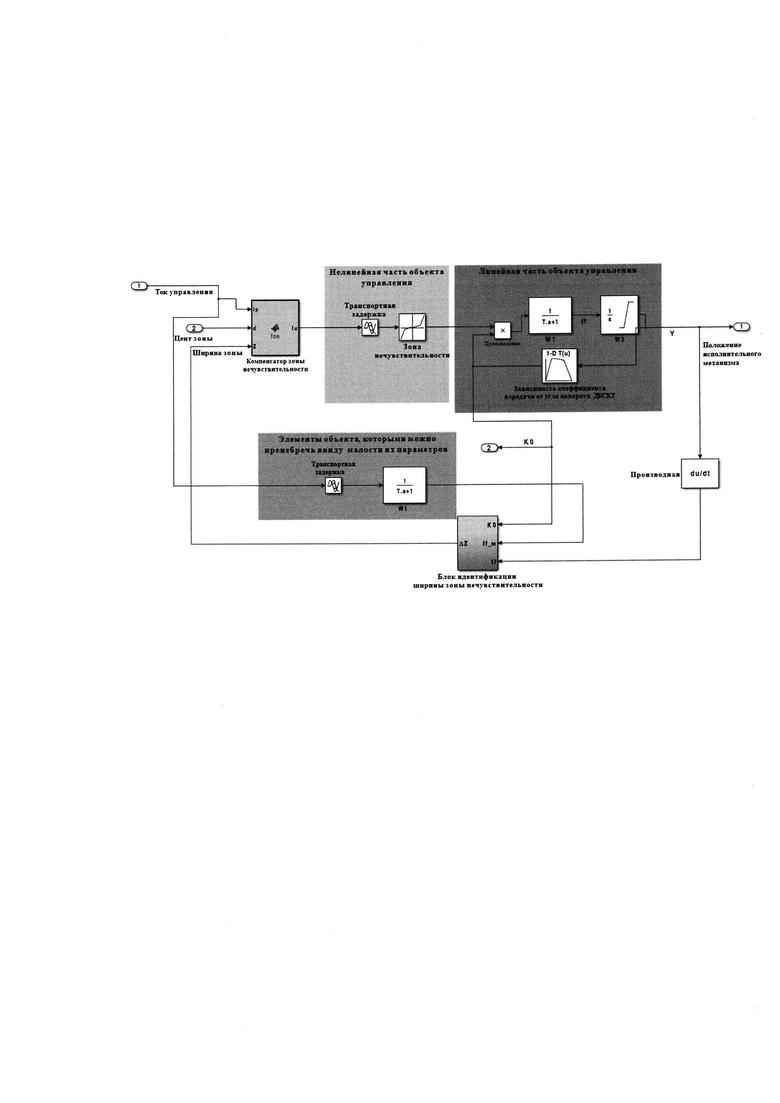
Для пояснения сущности изобретения рассмотрим обобщенную динамическую модель системы управления, в которой объектом управления является электро-гидромеханический привод направляющего аппарата компрессора или топливного крана
Как видно из фигуры, положение Y регулируемого органа задается звеном W2 на основании интегрирования входного тока If. Таким образом дифференцируя по времени выходной сигнал можно получить ТОК If.
Параметрическая идентификация ширины зоны нечувствительности основана на сравнительном анализе параметров тока управления Ip, формируемого блоком автоматического регулирования и контроля, пропущенного через элемент транспортной задержки и апериодическое звено первого порядка W1, и тока If, полученного дифференцированием выходного сигнала Y. Если учесть что параметры транспортной задержки и постоянной времени Т малы по отношению к периоду квантования сигнала управления, то этими элементами можно пренебречь и проводить сравнительный анализ тока управления Ip (выхода регулятора) и производной  При условии, что центр зоны нечувствительности найден согласно (2) и ширина зоны нечувствительности, заданной компенсатору идентична ее реальному значению амплитуды этих токов должны совпадать при учете коэффициента передачи К0 и компенсации С искажений вносимых компенсатором в ток Ip согласно (1). В противном случае осуществляется коррекция ширины зоны нечувствительности в компенсаторе согласно (3).
При условии, что центр зоны нечувствительности найден согласно (2) и ширина зоны нечувствительности, заданной компенсатору идентична ее реальному значению амплитуды этих токов должны совпадать при учете коэффициента передачи К0 и компенсации С искажений вносимых компенсатором в ток Ip согласно (1). В противном случае осуществляется коррекция ширины зоны нечувствительности в компенсаторе согласно (3).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2019 |
|
RU2730568C1 |
| СПОСОБ ИСПЫТАНИЯ ГИДРОМЕХАНИЧЕСКОЙ ЧАСТИ ЭЛЕКТРОННО-ГИДРОМЕХАНИЧЕСКОЙ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ВСПОМОГАТЕЛЬНОГО ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2016 |
|
RU2637272C2 |
| СПОСОБ ЗАЩИТЫ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ ОТ РАСКРУТКИ РОТОРОВ ПРИ ПОЖАРЕ | 2023 |
|
RU2825767C1 |
| СПОСОБ И УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОДАЧЕЙ ТОПЛИВА | 2008 |
|
RU2376199C2 |
| Способ управления механизацией компрессора газотурбинного двигателя | 2017 |
|
RU2639923C1 |
| Система подачи топлива в камеру сгорания авиационного газотурбинного двигателя | 2017 |
|
RU2636360C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2010 |
|
RU2472957C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ НА РЕЖИМЕ КОНСЕРВАЦИИ | 2008 |
|
RU2392469C2 |
| Устройство управления механизацией компрессора газотурбинного двигателя | 2016 |
|
RU2658709C2 |
| Способ управления входным направляющим аппаратом компрессора газотурбинного двигателя | 2022 |
|
RU2795359C1 |
Группа изобретений относится к области авиационного двигателестроения и может быть использована в электро-гидромеханических системах автоматического управления газотурбинными двигателями. Представлен способ управления газотурбинным двигателем, а также устройство для его реализации. Технический результат заключается в обеспечении асимптотической устойчивости и астатической точности позиционирования регулируемого органа с учетом нелинейности характеристики электро-гидромеханических агрегатов. Способ управления положением направляющих аппаратов компрессора газотурбинного двигателя или топливного крана включает идентификацию параметра нелинейности центр зоны нечувствительности электрогидромеханического привода типа «зона нечувствительности» в реальном времени, и компенсацию нелинейности. Кроме того, дополнительно идентифицируют параметр нелинейности ширина зоны нечувствительной электрогидромеханического привода типа «зона нечувствительности» в реальном времени, причём компенсацию нелинейности, обеспечивающую асимптотическую устойчивость управления и астатическую точность позиционирования направляющих аппаратов компрессора или топливного крана, осуществляют с учетом преобразования выходного сигнала устройства управления с учётом найденных параметров нелинейности по формуле:

где Ip - управляющий сигнал с выхода устройства управления; Iu - ток управления, подаваемый на вход электро-гидромеханического привода; N - максимальное значение диапазона изменения тока управления; d=(zП+zЛ)/2 - центр зоны нечувствительности электро-гидромеханического привода, который идентифицируется в реальном времени по формуле:

где Y0(t) - заданное положение исполнительного механизма; Y(t) - фактическое положение исполнительного механизма; dt1 - текущее значение d в момент времени tl; e(t) - текущая ошибка по положению исполнительного механизма; k, g - настроечные параметры, зависящие от режима работы двигателя и определяющие быстродействие блока идентификации; Z=zП - zЛ - ширина зоны нечувствительности, которая идентифицируется в реальном времени по формуле
где
К0 - коэффициент передачи объекта управления; Zo>0 - некоторое заданное начальное значение ширины зоны нечувствительности; Kz, а - настроечные параметры; t - текущее время. 2 н.п. ф-лы, 1 ил.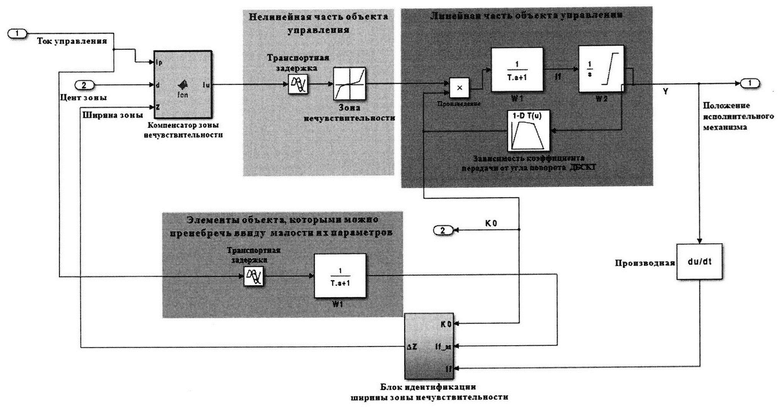
1. Способ управления положением направляющих аппаратов компрессора газотурбинного двигателя или топливного крана, включающий идентификацию параметра нелинейности центр зоны нечувствительности электрогидромеханического привода типа «зона нечувствительности» в реальном времени, и компенсацию нелинейности, отличающийся тем, что дополнительно идентифицируют параметр нелинейности ширина зоны нечувствительной электрогидромеханического привода типа «зона нечувствительности» в реальном времени, причём компенсацию нелинейности, обеспечивающую асимптотическую устойчивость управления и астатическую точность позиционирования направляющих аппаратов компрессора или топливного крана, осуществляют с учетом преобразования выходного сигнала устройства управления с учётом найденных параметров нелинейности по формуле

где
Iр - управляющий сигнал с выхода устройства управления;
Iu - ток управления, подаваемый на вход электрогидромеханического привода;
N - максимальное значение диапазона изменения тока управления;
 - центр зоны нечувствительности электрогидромеханического привода, который идентифицируется в реальном времени по формуле
- центр зоны нечувствительности электрогидромеханического привода, который идентифицируется в реальном времени по формуле

где Y0(t) - заданное положение исполнительного механизма;
Y(t) - фактическое положение исполнительного механизма;
dt1 - текущее значение d в момент времени t1;
e(t) - текущая ошибка по положению исполнительного механизма;
k, g - настроечные параметры, зависящие от режима работы двигателя и определяющие быстродействие блока идентификации;
Z=zП - zЛ - ширина зоны нечувствительности, которая идентифицируется в реальном времени по формуле
где
К0 - коэффициент передачи объекта управления;
Z0>0 - некоторое заданное начальное значение ширины зоны нечувствительности;
Kz, а - настроечные параметры;
t - текущее время.
2. Устройство для управления положением направляющих аппаратов компрессора газотурбинного двигателя или топливного крана, содержащее электрогидромеханический привод направляющих аппаратов компрессора или топливного крана и блок автоматического регулирования и контроля, включающий устройство управления гидромеханическим приводом и компенсатор нелинейности, отличающееся тем, что дополнительно содержит блок параметрической идентификации параметров нелинейности центр зоны нечувствительности (dt) и ширина зоны нечувствительности (Z) электрогидромеханического привода типа «зона нечувствительности» в реальном времени, причём компенсатор нелинейности осуществляет преобразование выходного сигнала устройства управления с учетом найденных параметров нелинейности по формуле
где
Iр - управляющий сигнал с выхода устройства управления;
Iu - ток управления, подаваемый на вход электрогидромеханического привода;
N - максимальное значение диапазона изменения тока управления;
- центр зоны нечувствительности электрогидромеханического привода, который идентифицируется в реальном времени по формуле
где Y0(t) - заданное положение исполнительного механизма;
Y(t) - фактическое положение исполнительного механизма;
dt1 - текущее значение d в момент времени t1;
e(t) - текущая ошибка по положению исполнительного механизма;
k, g - настроечные параметры, зависящие от режима работы двигателя и определяющие быстродействие блока идентификации;
Z=zП - zЛ - ширина зоны нечувствительности, которая идентифицируется в реальном времени по формуле
где
К0 - коэффициент передачи объекта управления;
Z0>0 - некоторое заданное начальное значение ширины зоны нечувствительности;
Kz, а - настроечные параметры;
t - текущее время.
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2019 |
|
RU2730568C1 |
| Цифровой регулятор | 1979 |
|
SU930230A1 |
| ОРТОДОНТИЧЕСКИЙ АППАРАТ | 2000 |
|
RU2181036C1 |
| СПОСОБ АДАПТИВНОЙ АНТИРЕЗОНАНСНОЙ КОРРЕКЦИИ НЕСТАБИЛЬНЫХ ЧАСТОТНЫХ ХАРАКТЕРИСТИК КОЛЕБАТЕЛЬНОГО ОБЪЕКТА УПРАВЛЕНИЯ И САМОНАСТРАИВАЮЩАЯСЯ СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2174252C1 |

