Изобретение относится к области авиационного двигателестроения и может быть использовано в электро-гидромеханических системах автоматического управления газотурбинными двигателями.
Известен способ регулирования авиационного турбореактивного двигателя (RU 2623706), в котором предварительно для данного типа двигателя в рабочем диапазоне углов установки направляющих аппаратов компрессора формируют две и более программы регулирования углов установки направляющих аппаратов компрессора в зависимости от его приведенной частоты вращения, при каждой программе измеряют значения тяги и расхода топлива, строят зависимости расхода топлива по тяге и по ним определяют программу регулирования, обеспечивающую минимальный расход топлива в заданном диапазоне тяги и вводят ее дополнительно в регулятор двигателя, отличающийся тем, что при полете самолета, при переходе на крейсерский режим работы двигателя, по сигналу выключения охлаждения турбины производят переключение программы управления направляющими аппаратами компрессора в зависимости от приведенных оборотов на программу, обеспечивающую минимальный расход топлива в заданном диапазоне тяги.
Данный способ управления направлен на повышение эффективности расхода топлива на различных режимах работы двигателя, а не на управление направляющими аппаратами компрессора.
Известен способ управления газотурбинным двигателем (RU 2379534), заключающийся в том, что по измеренному положению рычага управления двигателем, измеренной частоте вращения ротора двигателя, измеренной температуре газов за турбиной двигателя, измеренному давлению воздуха за компрессором двигателя формируют управляющее воздействие на расход топлива в камере сгорания, по измеренной частоте вращения ротора двигателя и температуре воздуха на входе в двигатель формируют значение приведенной частоты вращения ротора двигателя, формируют заданное положение лопаток направляющего аппарата компрессора двигателя, сравнивают его с измеренным положением лопаток направляющего аппарата, по величине рассогласования между заданным и измеренным значениями формируют управляющее воздействие на привод лопаток направляющего аппарата, отличающийся тем, что дополнительно контролируют величину рассогласования между заданным и измеренным значениями положения лопаток направляющего аппарата, если рассогласование превышает наперед заданную величину, определяемую по результатам испытаний двигателя на запас газодинамической устойчивости компрессора, ограничивают темп изменения расхода топлива.
Недостаток данного способа управления связан с тем, что при формировании управляющего воздействия не учитывается нестационарная нелинейность приводов направляющих аппаратов компрессора.
Наиболее близким, принятым за прототип является способ управления газотурбинным двигателем (RU 2007599), согласно которому регулирование подачи топлива осуществляют по сигналу разности заданной и измеренной частот вращения ротора, а управление направляющим аппаратом компрессора осуществляют по измеренной частоте вращения ротора газотурбинного двигателя, причем в процессе работы газотурбинного двигателя определяют передаточные функции по каналам воздействия направляющих аппаратов и расхода топлива на частоту вращения, находят их отношение и дополнительно осуществляют воздействие на подачу топлива в зависимости от угла установки направляющего аппарата с передаточной функцией, равной определенному отношению передаточной функции газотурбинного двигателя по каналу воздействия направляющего аппарата на частоту вращения к передаточной функции газотурбинного двигателя по каналу воздействия расхода топлива на частоту вращения.
Недостаток данного способа управления связан с тем, что в процессе работы динамическая ошибка регулирования положения направляющего аппарата на переходных режимах приводит к увеличению времени приемистости и сброса. Например, при отставании положения направляющего аппарата от заданной программы при приемистости, сигнал с блока коррекции расхода топлива снижает темп увеличения расхода топлива. В результате, чем больше динамическая ошибка по положению направляющих аппаратов, тем больше время приемистости.
Как показывает практика эксплуатации агрегатов управления топливом и направляющими аппаратами компрессора, параметры нелинейности гидромеханической части не одинаковы для различных электро-гидромеханических приводов, а также меняются в процессе эксплуатации двигателя.
Традиционный метод компенсации нелинейности гидромеханической части заключающийся во введении в цепь управления направляющими аппаратами компрессора пропорционально-интегрально-дифференцирующего регулятора, использующего линейный закон управления, недостаточен для компенсации нестационарной нелинейности электро-гидромеханических приводов. Кроме того, с учетом не стационарности параметров нелинейности гидромеханической части, настройка параметров такого регулятора имеет сложную эвристическую неформальную схему и требует использования переменных коэффициентов передачи пропорционально-интегрально-дифференцирующего регулятора, зависящих от параметров и режимов работы двигателя. Настройкой такого регулятора приходится заниматься также при появлении колебательных процессов в контурах управления агрегатами управления топливом или в случае неудовлетворительной точности позиционирования направляющими аппаратами компрессора.
Задачей изобретения является устранение указанных недостатков и повышение эффективности управления направляющими аппаратами компрессора.
Техническим результатом изобретения является разработка способа управления положением направляющих аппаратов компрессора газотурбинного двигателя, обеспечивающего асимптотическую устойчивость и астатическую точность позиционирования направляющих аппаратов компрессора с учетом нелинейности характеристик электро-гидромеханических агрегатов.
Технический результат достигается тем, что согласно изобретению предложено устройство для реализации способа управления положением направляющих аппаратов компрессора газотурбинного двигателя, включающего параметрическую идентификацию нелинейности электро-гидромеханического привода типа «зона нечувствительности» в реальном времени и компенсацию нелинейности, обеспечивающую асимптотическую устойчивость управления и астатическую точность позиционирования направляющих аппаратов компрессора с учетом найденных параметров нелинейности, содержащее электрогидромеханический привод и блок автоматического регулирования и контроля, включающий устройство управления электро-гидромеханическим приводом и компенсатор нелинейности, осуществляющий преобразование выходного сигнала устройства управления по формуле

где
Ip - управляющий сигнал с выхода устройства управления.
Iu - ток управления, подаваемый на вход электро-гидромеханического привода;
N - максимальное значение диапазона изменения тока управления;
ΔZ=zП-zЛ - ширина зоны нечувствительности (задается в паспорте электро-гидромеханического привода);
d=(zП+zЛ)/2 - центр зоны нечувствительности электро-гидромеханического привода, который идентифицируется в реальном времени по формуле 
где Y0(t) - заданное положение направляющих аппаратов компрессора,
Y(t) - фактическое положение направляющих аппаратов компрессора
dt1 - текущее значение d в момент времени t1,
e(t) - текущая ошибка по положению направляющих аппаратов компрессора,
k, g - настроечные параметры, зависящие от режима работы двигателя и определяющие быстродействие блока идентификации.
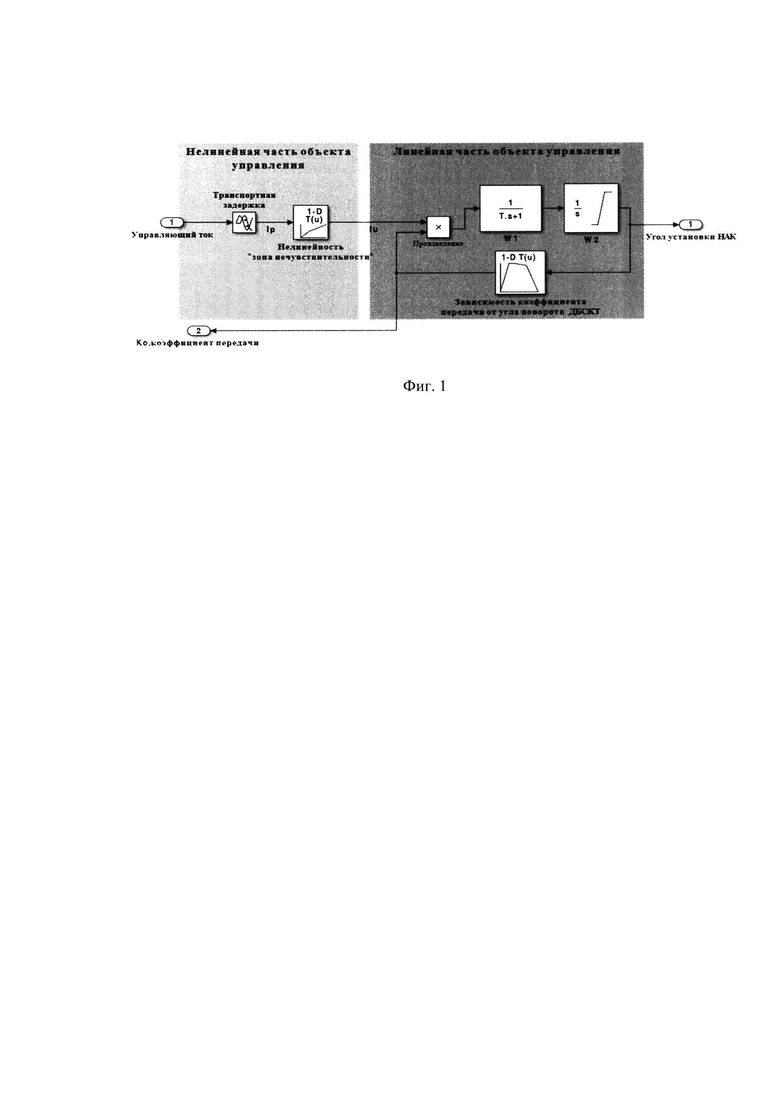
Для пояснения сущности изобретения рассмотрим модель системы управления, в которой в качестве агрегата выступает электро-гидромеханический привод направляющего аппарата компрессора (Фиг. 1)
Передаточная функция разомкнутой линейной части объекта управления имеет вид

где K0 - коэффициент передачи объекта управления.
Передаточная функция замкнутой линейной части объекта управления без устройства управления имеет вид

Статический коэффициент усиления W(0)=1, т.е. объект астатический, обеспечивающий нулевую ошибку в установившемся режиме.
Корни характеристического полинома

т.е. для обеспечения асимптотического характера переходных процессов (вещественных отрицательных корней) общий коэффициент усиления в системе K должен быть ≤2,5.
Для сохранения значения K0 в диапазоне от 1 до 6 и общего коэффициента усиления Kp≤0,41 при замыкании цепи в устройство управления вводится понижающий коэффициент усиления.
Для увеличения быстродействия допустимый коэффициент усиления повышают за счет введения корректирующей цепи вида  , или с учетом наличия звена запаздывания в нелинейной части объекта управления.
, или с учетом наличия звена запаздывания в нелинейной части объекта управления.

Тогда, регулятор для объекта (1), обеспечивающая асимптотический переходный процесс, будет иметь следующий вид:

где Kr - коэффициент усиления
Для компенсации заданной зоны нечувствительности рассчитанный регулятором (4) ток управления Ip, должен преобразовываться в непосредственно воздействующий на объект управления ток Iu следующим образом;

где
N - максимальное значение диапазона изменения тока управления,
zП - правая граница зоны нечувствительности
zЛ - левая граница зоны нечувствительности
Введем обозначения:
ΔZ=zП-zЛ - ширина зоны нечувствительности (задается в паспорте электро-гидромеханического привода);
d=(zП+zЛ)/2 - центр зоны нечувствительности.
Очевидно, что

Тогда задача параметрической идентификации нелинейности типа "зона нечувствительности" заключается в корректировке значения d, которое как отмечалось выше, является нестационарной величиной с тем, чтобы задать левую и правую границу для правила преобразования (5).
Поскольку система управления имеет астатизм 1-го порядка, критерием совпадения текущего значения d с его истинным значением будет нулевая ошибка по положению направляющих аппаратов компрессора на установившемся режиме.
Установившийся режим работы ГТД, при котором все его параметры стационарны характеризуется равенством нулю производной задающего сигнала Y0 и производной выходного сигнала объекта управления Y.
Таким образом, текущее значение d следует корректировать пропорционально ошибке положения направляющих аппаратов компрессора в сторону, соответствующую знаку ошибки.
Формально, это правило можно записать следующим образом:

где
dt1 - текущее значение d в момент времени t1,
e(t) - текущая ошибка по положению направляющего аппарата компрессора,
k - настроечный параметр, зависящий от режима работы двигателя.
Обобщая изложенное выше, получаем структуру адаптивной системы управления для реализации способа управления осуществляющего параметрическую идентификацию нелинейности объекта управления типа "зона нечувствительности" в реальном времени и обеспечивающего астатическое управление с учетом найденных параметров нелинейности (Фиг. 2).
Для проверки работоспособности адаптивной системы управления были проведены ее стендовые испытания на двигателе ТВ7-117СТ, которые показали эффективность предложенного способа управления с системой параметрической идентификации и компенсации нестационарной нелинейности.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2023 |
|
RU2831023C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ НАПРАВЛЯЮЩИХ АППАРАТОВ КОМПРЕССОРА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2010 |
|
RU2425255C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ НАПРАВЛЯЮЩИХ АППАРАТОВ КОМПРЕССОРА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2010 |
|
RU2432501C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ НАПРАВЛЯЮЩИХ АППАРАТОВ КОМПРЕССОРА ДВУХКОНТУРНОГО ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2009 |
|
RU2422682C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2490492C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОДАЧЕЙ ТОПЛИВА ДЛЯ ГАЗОТУРБИННЫХ ДВИГАТЕЛЕЙ | 2006 |
|
RU2322601C1 |
| Устройство управления механизацией компрессора газотурбинного двигателя | 2016 |
|
RU2658709C2 |
| Способ управления входным направляющим аппаратом компрессора газотурбинного двигателя | 2022 |
|
RU2795359C1 |
| Способ управления механизацией компрессора газотурбинного двигателя | 2017 |
|
RU2639923C1 |
| СИСТЕМА УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2012 |
|
RU2501964C1 |

Изобретение относится к области авиационного двигателестроения и может быть использовано в электрогидромеханических системах автоматического управления газотурбинными двигателями. Техническим результатом настоящего изобретения является разработка способа управления положением направляющих аппаратов компрессора газотурбинного двигателя, обеспечивающего асимптотическую устойчивость и астатическую точность позиционирования направляющих аппаратов компрессора с учетом нелинейности характеристики электрогидромеханических агрегатов. Технический результат достигается тем, что согласно изобретению предложено устройство для реализации способа управления положением направляющих аппаратов компрессора газотурбинного двигателя, включающего параметрическую идентификацию нелинейности электрогидромеханического привода типа «зона нечувствительности» в реальном времени и компенсацию нелинейности, обеспечивающую асимптотическую устойчивость управления и астатическую точность позиционирования направляющих аппаратов компрессора с учетом найденных параметров нелинейности, содержащее электрогидромеханический привод и блок автоматического регулирования и контроля, включающий устройство управления электрогидромеханическим приводом и компенсатор нелинейности, осуществляющий преобразование выходного сигнала устройства управления по формуле

где Ip - управляющий сигнал с выхода устройства управления; Iu - ток управления, подаваемый на вход преобразователя сигнала электрогидромеханического привода; N - максимальное значение диапазона изменения тока управления; ΔZ=zП-zЛ - ширина зоны нечувствительности (задается в паспорте электро-гидромеханического привода); d=(zП+zЛ)/2 - центр зоны нечувствительности гидромеханической системы электрогидромеханического привода, который идентифицируется в реальном времени по формуле

где Y0(t) - задание по положению направляющего аппарата компрессора; Y(t) - фактическое положение направляющего аппарата компрессора; dt1 - текущее значение d в момент времени t1; e(t) - текущая ошибка по положению направляющего аппарата компрессора; k, g - настроечные параметры, зависящие от режима работы газотурбинного двигателя. 2 н.п. ф-лы, 2 ил.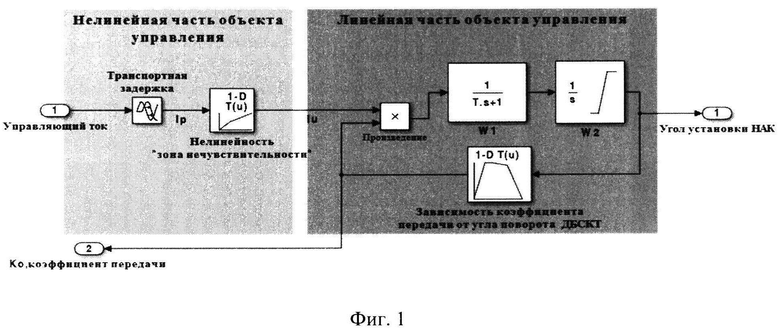
1. Способ управления положением направляющих аппаратов компрессора газотурбинного двигателя, включающий параметрическую идентификацию нелинейности электрогидромеханического привода типа «зона нечувствительности» в реальном времени и компенсацию нелинейности, обеспечивающую асимптотическую устойчивость управления и астатическую точность позиционирования направляющих аппаратов компрессора с учетом найденных параметров нелинейности.
2. Устройство для реализации способа по п. 1, содержащее электрогидромеханический привод направляющего аппарата компрессора и блок автоматического регулирования и контроля, включающий устройство управления электрогидромеханическим приводом и компенсатор нелинейности, осуществляющий преобразование выходного сигнала устройства управления по формуле

где Iр - управляющий сигнал с выхода устройства управления;
Iu - ток управления, подаваемый на вход преобразователя сигнала электрогидромеханического привода;
N - максимальное значение диапазона изменения тока управления;
ΔZ=zП-zЛ - ширина зоны нечувствительности (задается в паспорте электрогидромеханического привода);
d=(zП+zЛ|)/2 - центр зоны нечувствительности гидромеханической системы электрогидромеханического привода, который идентифицируется в реальном времени по формуле

где Y0(t) - задание по положению направляющего аппарата компрессора;
Y(t) - фактическое положение направляющего аппарата компрессора;
dt1 - текущее значение d в момент времени t1;
e(t) - текущая ошибка по положению направляющего аппарата компрессора;
k, g - настроечные параметры, зависящие от режима работы газотурбинного двигателя.
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 1989 |
|
RU2007599C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2379534C2 |
| Способ регулирования авиационного турбореактивного двигателя | 2016 |
|
RU2623706C1 |

